基于无人机摄影测量的地形三维重建研究
2022-09-22温立文贾延
温立文 贾延
(北京星天地信息科技有限公司 北京 102299)
影像的三维重建是基于双目立体视觉的原理,结合传统摄影测量技术,利用多视角的无人机影像数据生成三维模型的技术。该方法最核心的算法和技术包括:第一,基于SFM 算法的空三加密,这一步是为了恢复无人机影像的空中位置和姿态,并且得到高精度的稀疏点云数据[1];第二,基于SGM 算法的密集匹配,这一步是为了生成深度图,再对深度图进行融合来获取密集点云,密集匹配是后续DSM生成和DOM纠正的基础,最后通过点云插值和纹理映射,获取DSM 和DOM影像[2]。
1 研究区概况
研究区域位于河北省某煤矿,是一处正在进行开采的井工矿采煤工作面。课题选择该工作面正上方及附近区域地表范围作为无人机影像获取区域,该区域东西最大间距为789m,南北最大间距为221m,面积约为0.12km2。监测区域被河流分为两个区域:河东岸主要为村庄居民区,地物多为房屋建筑物;河西岸主要为作物区域,地物包括公路、农作物和树木。测区多元化的地物为本文研究矿区开采对地表地形、地物的变化特征提取提供了样例数据。
2 数据获取
无人机影像数据获取的流程主要包括航测前的准备工作和实地采集两大部分,具体的内容如图1所示。
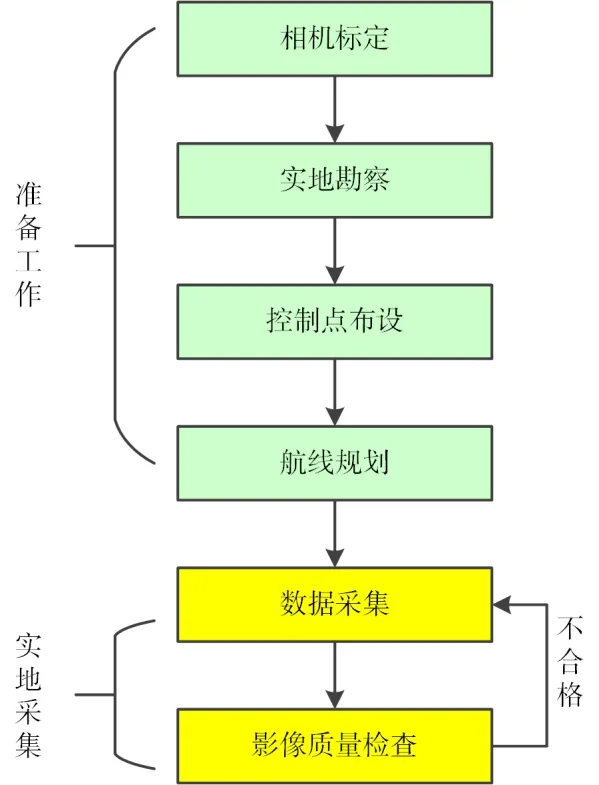
图1 无人机影像获取流程
2.1 航线规划
由于实验中所用采集数据的无人机搭载的是单目相机,因此,单次实验需要通过调节相机云台的倾角对测区进行5 次拍摄,获取不同角度测区的无人机影像数据,以保证测区三维重建的完整性和精确性。
在规划航线时,考虑到所采用的轻型无人机像幅较小及测区地表地物较为复杂的多重原因,决定采用高重叠度的布设方案[3]。航线布设的具体参数为:相对航高80m;地面分辨率2.19cm;航带间距25m;航向重叠率80%;旁向重叠率70%;5 次飞行相对倾角分别为90°、45°、135°、45°、135°。
2.2 控制点布设
按照无人机摄影测量外业像控点布设的原则和要求,本文中的3 次实验均采用以CORS 站为基准站、使用网络RTK 进行快速定位的方法获取监测点的空间位置信息[4]。在对每一个监测点进行测量前,均对流动站进行初始化并得到固定解,且对每个监测点进行在当地坐标系、WGS-84-BLH 和WGS-84-UTMZone50(N)3个坐标系下的测量。其平面位置中误差≤0.02cm,高程中误差≤0.02cm,最大限差是中误差的2倍[5]。本文采用的是全野外布设像控点的方式,控制点均匀分布在村落区域、公路区域和作物区域。3 期的控制点布设数量依次为11、9、12,其中,第三期的控制点如图2所示。
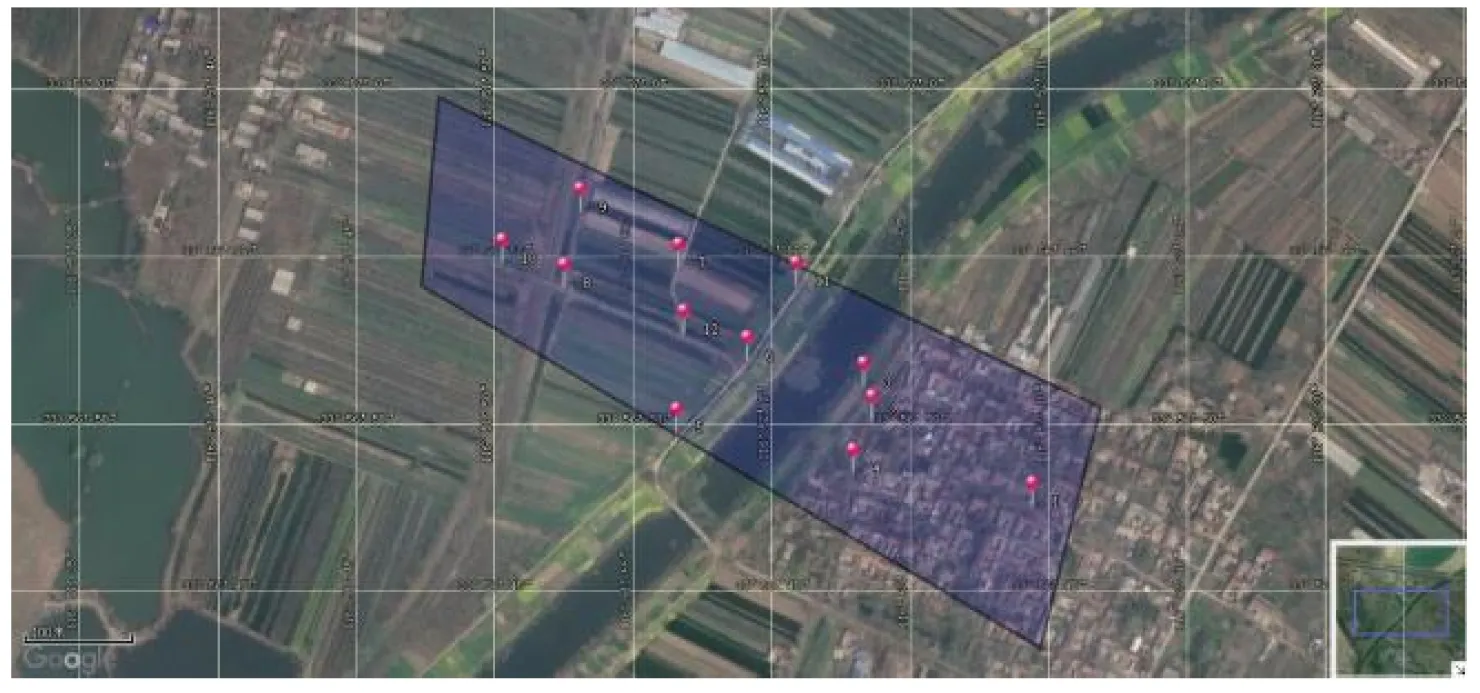
图2 第三期影像控制点分布图
2.3 实地采集
本次采用的是单目相机搭载在四旋翼的轻量级无人机Phantom 4 PRO V2.0上进行影像数据采集。
本项目一共采集了3 期影像数据,均是无人机飞行所摄影像。第一期影像拍摄时间为2020年1月15日,为工作面采掘开始阶段;第二期影像的拍摄时间为2020年6月11日,为工作面采掘收尾阶段;第三期影像拍摄时间为2021年1月15日,为工作面采掘1年后。另外,还获取了矿区监测点的沉降监测数据,为后期数据的精度验证提供了数据支持。
在航测前的相机标定、航线规划和像控点布设等准备工作全部完成之后,便进行无人机影像的实地采集。
3 空中三角测量结果及精度分析
本文选择Context Capture 来进行无人机影像的三维重建。借助这个软件,无需昂贵的专业化设备,即可对无人机影像进行三维重建,进而获得测区的DOM、DSM、三维点云和三维模型等产品数据,具体的三维重建处理流程如图3所示。
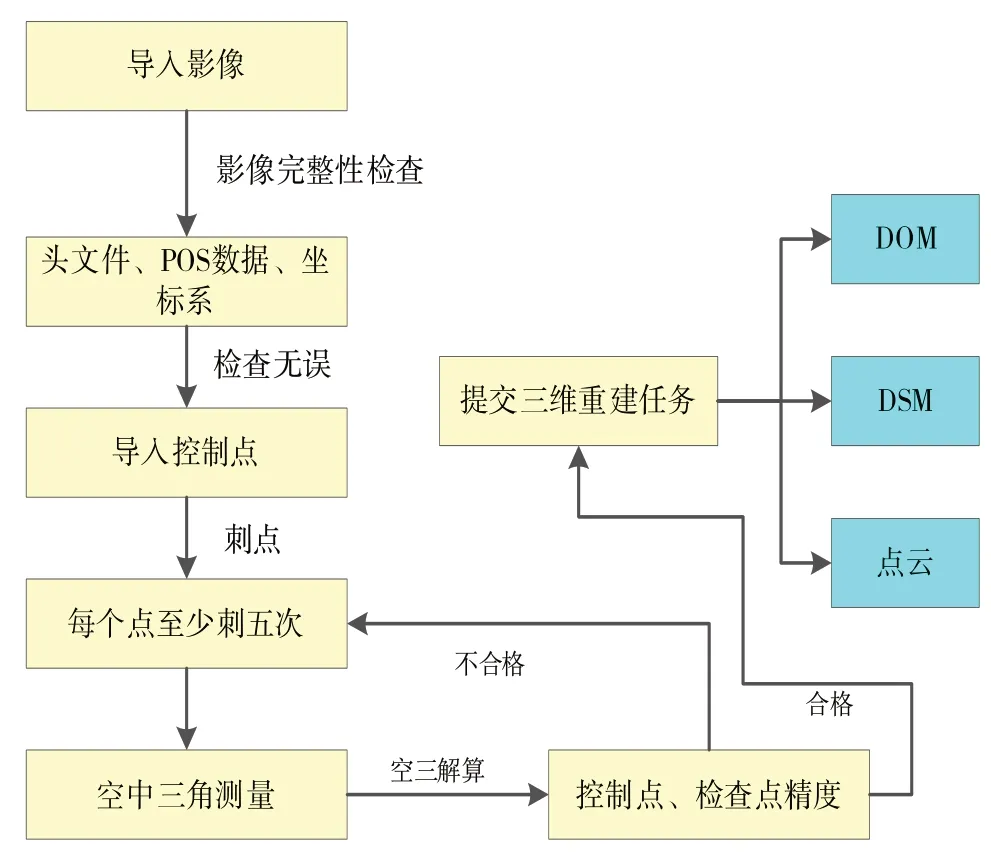
图3 C ontext C apture 无人机三维重建处理流程
将预处理完毕的无人机影像数据导入Context Capture 软件中,检查影像的完整性,包括影像的头文件、POS 数据、坐标系;导入控制点文件、相机标定参数;最后,检查影像序列的正确性,检查每个曝光点的影像信息及相邻带侧视影像飞行方向是否一致,同时与垂直图像的飞行方向也要一样。
空中三角测量结束之后,可以获得测区的稀疏点云数据和空中三角测量报告,报告的内容包括总体质量概括、连接点的数量和分布、控制点和检查点的精度,测区稀疏点云数据如图4所示。

图4 稀疏点云数据
4 地形三维重建的影像产品数据及精度评价
4.1 三维重建影像产品的生成
在通过空中三角测量获取了无人机影像的稀疏点云数据后,便可进行三维数据的生产。根据后续研究和分析的需要,本文中通过三维重建获取的三维数据包括:三维点云数据、TDOM影像、DSM影像。
由于影像数据量较大,且现有的计算机运算能力有限,需对空三生产的稀疏点云数据进行空间立方体的分块处理:第一期稀疏点云被划分为76 个瓦片,每块瓦片的大小为68m 的区块;第二期稀疏点云被划分为64 个瓦片,每块瓦片的大小为76m 的区块;第三期稀疏点云被划分为78个瓦片,每块瓦片的大小为67m的区块。完成分区后,便开始进行三维数据的生产,最终获得三期实验的DSM影像、DOM影像和三维点云数据。三期DSM数据如图5所示。
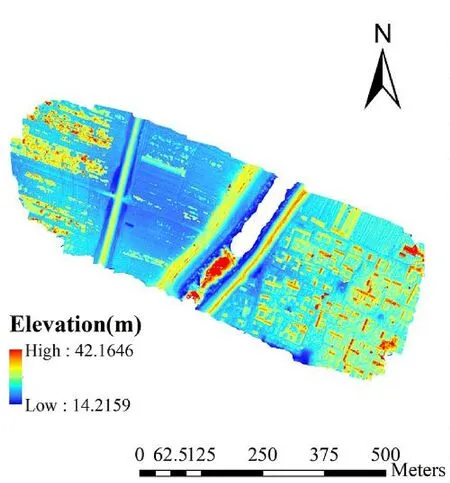
图5 三期DSM 数据
4.2 三维重建影像产品的精度评价
为了进一步验证所得三维数据的精度,将图上所得控制点与控制点实测的数据进行对比,算出所得DSM 影像、DOM 影像和三维点云的误差,误差的统计如表1所示。

表1 DO M/DSM 精度评价
3 次实验的成图精度均小于1∶500 比例尺下给定限值的要求(DOM 平地、丘陵地区小于0.6,山地、高山小于0.8)[6],同时也满足后续特征提取的精度要求。
5 结语
本文研究了基于无人机影像的地形三维重建原理与方法,包括基于SFM 算法的空中三角测量、基于SGM算法的点云密集匹配、DSM插值和纹理映射生成DOM 影像。通过三维重建,可获取矿区的三维点云、DSM 和DOM 数据,利用控制点三维坐标信息,对空三和生成的三维产品进行了精度验证。
