基于Rao-Blackwellised粒子滤波的相控阵导引头指向误差斜率在线估计
2022-09-22廖志忠
王 琪 廖志忠 燕 飞
(中国空空导弹研究院 洛阳 471009)
1 引 言
有源相控阵雷达(Active Electronically Scanned Array radar, AESA)采用有源相控阵天线取代了平板缝阵天线,相控阵天线阵面由大量的发射/接收(T/R)单元组成,通过控制每个单元的相位和幅度在空间进行功率合成,形成需要的波束指向[1]。AESA具有波束指向灵活、自适应波束形成、作用距离远、可靠性高、抗干扰性能好等优点,已成为现代先进战斗机的标准配置。随着微电子及微机械技术的发展,AESA已进入了由平板缝阵天线技术主导的弹载雷达导引头领域,在各类战术导弹上得到了广泛的应用[2]。
弹载相控阵雷达导引头由天线罩、有源相控阵天线、频率综合器、信号处理机等组成[3]。天线罩的功能是承受导弹超音速飞行引起的结构和热载荷。为减小阻力导弹天线罩为非半球形形状,当目标回波穿过天线罩时存在折射效应,导致雷达接收波束产生畸变,最终表现为出现视在目标角度误差,称为瞄准线误差(Bore-Sight Error, BSE)[4],天线罩瞄准误差斜率(Bore-Sight Error Slope,BSES)是对天线罩引起的波束畸变的一种度量。另一方面,通过控制相控阵天线每个T/R单元的相位和幅度分配,得到相应的辐射方向图和波束指向。受T/R单元互耦和数字移相器有效位数的影响[5],相控阵天线波束指向同样存在误差。相控阵天线指向误差和天线罩瞄准线误差两者共同构成了相控阵导引头指向误差[6]。相控阵导引头指向误差会影响角度量测信息的准确性,在指向误差较大的情况下会产生严重的寄生回路耦合问题,使制导系统发生振荡,影响制导系统的稳定性和制导精度。对于采用气动力控制的导弹,高空由于大气稀薄导弹攻角时间常数增大,在导引头指向误差和攻角时间常数都较大的情况下,在高空更易出现寄生回路振荡问题[7]。
在导弹制导飞行过程中,对天线罩瞄准线误差或相控阵导引头指向误差进行在线估计与补偿,一直是学术界和工业界的研究热点。在天线罩误差在线估计方面,Willman[8]和Zarchan等人[9]提出了采用自适应抖动的方法对天线罩误差斜率进行估计与补偿。此方法对抖动信号的频率、幅值有较高要求,而且施加的抖动信号也会影响导弹的制导性能。Yueh[10]和Lin等人[11]首次提出了使用多模型滤波方法估计天线罩误差斜率。曹晓瑞等人[12]和周荻等人[13]进一步研究了交互式多模型(Interacting Multiple Model, IMM)和扩展卡尔曼滤波(Extended Kalman Filter, EKF)算法估计天线罩误差斜率。多模型的方法需要精心设计各模型间的概率转移矩阵以期达到理想的估计效果,但针对某一工况设计的概率转移矩阵不能完全适应于天线罩误差斜率的复杂变化情况。宗睿等人[14]研究了无迹卡尔曼滤波(Unscented Kalman Filter, UKF)算法估计天线罩误差斜率。UKF算法基于无迹变换(Unscented Transformation, UT)进行Sigma点采样,不必对非线性系统作线性化处理。金鹏飞等人[15]研究了模型参考自适应的方法估计天线罩误差斜率。对于相控阵导引头指向误差,文献[6]研究了相控阵导引头指向误差对导弹制导系统的影响机理,并给出了3种解决措施,包括基于IMM-EKF的在线估计方法;Lin等人[16]给出了一种基于扩展状态Kalman滤波器的方法估计天线罩误差斜率和波束指向误差斜率。
由于相控阵导引头指向误差的存在,使用相控阵导引头估计目标状态可以看成是传感器端和目标端两端状态都存在不确定性的问题,这与机器人同步定位与制图(Simultaneous Localization And Mapping, SLAM)领域研究的问题是相似的。SLAM需要在未知机器人位姿的前提下,同时完成机器人位姿的估计和地标位置的估计,进而建立环境地图[17]。在SLAM领域,FastSLAM算法是Rao-Blackwellised粒子滤波(Rao-Blackwellised Particle Filters, RBPF)最为成功的应用实例, 也是应用最为广泛的SLAM方法[18-20]。文献[21]分析了Fast-SLAM算法的一致性收敛问题,FastSLAM的行为类似于一个非最优的局部搜索算法,在粒子数足够的情况下,FastSLAM算法可以在实践中产生良好的非随机估计值。
本文基于RBPF滤波算法提出一种新的相控阵导引头指向误差斜率的估计方法,本方法可以同步估计导引头指向误差斜率和目标状态,实现了在制导跟踪运动目标的过程中,在线估计导引头指向误差斜率,降低导引头指向误差对制导系统的不利影响,提高系统的稳定性和制导精度。
2 相控阵导引头指向误差斜率对制导系统的影响
对于完全稳定的相控阵导引头以及考虑指向误差斜率和气动力的相互作用,采用比例导引的制导系统动力学模型如图1所示[6]。
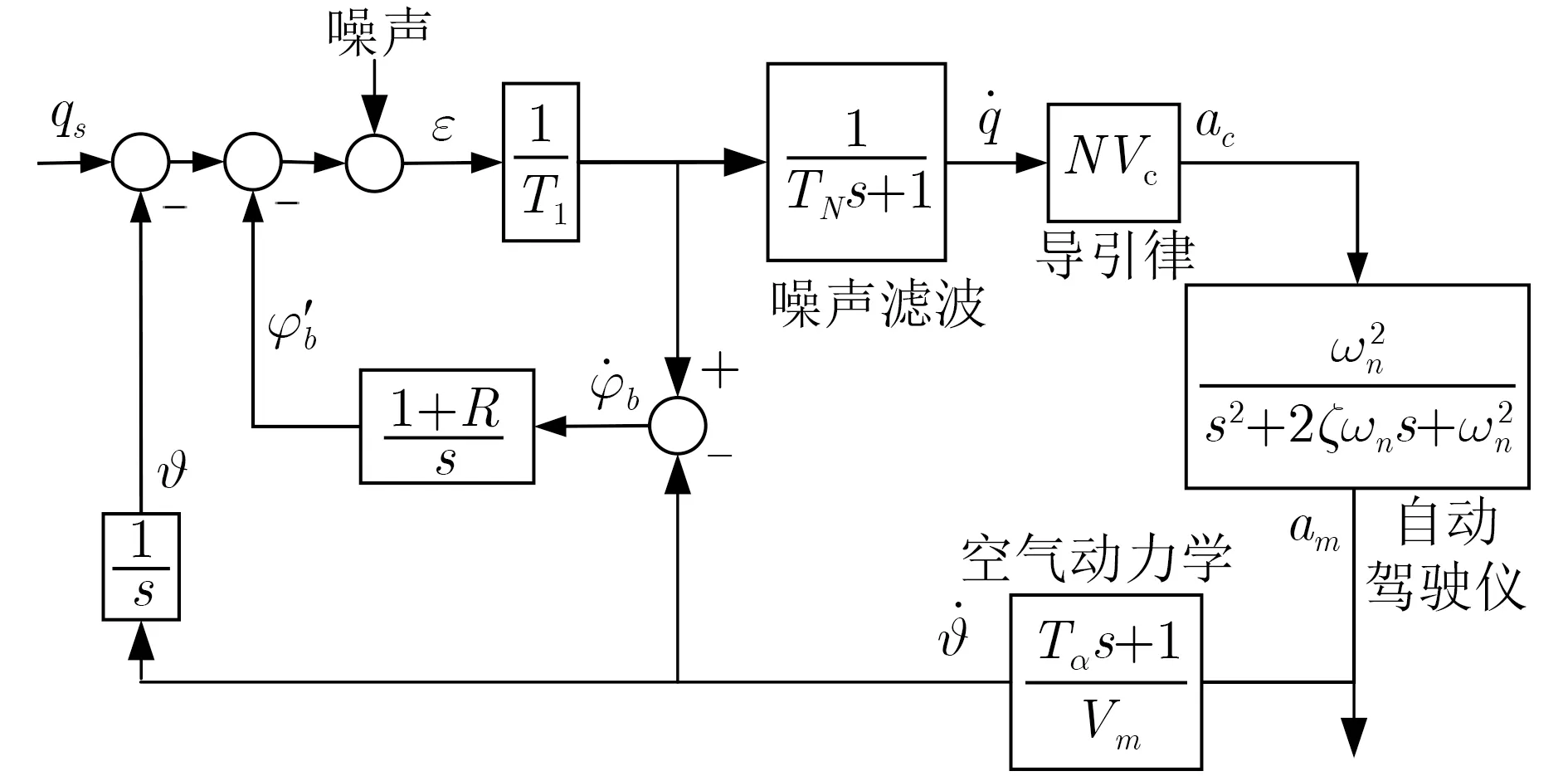
图1 制导系统动力学模型

从式(1)可以看出,由于相控阵导引头指向误差斜率的存在(即R不为0),式(1)不为0,这表明当向自动驾驶仪输入一个加速度指令后,在导引律模块后会耦合输出一个加速度指令,此为寄生加速度指令,表明制导系统存在寄生回路耦合,出现寄生回路振荡效应,且随着R值的增大,制导系统寄生振荡现象越明显。
根据相关文献[6],取相控阵导引头指向误差斜率R为0.02和0.05进行仿真,制导飞行过程中导弹姿态角变化情况如图2所示。

图2 导弹姿态角
从图2的仿真结果可以看出,指向误差斜率越大,导弹姿态角振荡越剧烈,说明寄生回路耦合效应越严重。
3 基于RBPF的导引头指向误差斜率估计
Rao-Blackwellised粒子滤波算法通过分析将某些变量边缘化来减小状态空间的大小;然后在减小了的状态空间上进行粒子采样,以解决高维状态空间中粒子滤波效率很低的问题[18]。对于相控阵导引头指向误差斜率对导引头测量信息的影响,可以采用RBPF完成指向误差斜率的估计,并同步完成目标状态的估计。

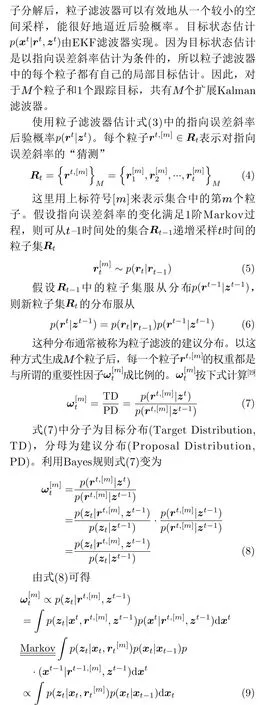
式(9)表明粒子权值正比于以目标状态一步预测值为条件的量测信息的概率。式(3)中的目标
4 算法实现
导弹制导信息滤波模型包括系统动态方程和观测方程[22]。在惯性坐标系中建立系统动态方程


5 数字仿真验证
进行导弹攻击飞机目标的仿真,仿真中假设导弹和目标在同一水平面内飞行,仿真框图见图1,仿真初始条件见表1。
表1 仿真初始条件
导弹采用比例导引律进行制导,控制指令为

仿真中使用正弦信号模拟相控阵导引头指向误差斜率R的真实变化,即式中,指向误差斜率幅值取A=0.05 , 频率取f={0.1 Hz, 0.5 Hz}。相控阵导引头测角噪声以及RBPF滤波器参数见表2。
表2 仿真参数
仿真结果如下列图、表所示。图3、图4为典型仿真条件下相控阵导引头指向误差斜率的估计值曲线。图5为不同信噪比下、蒙特卡洛实验统计的UKF算法和本文算法得到的指向误差斜率估值的均方根误差曲线。综合两个频率下的仿真结果可以看出,本文所提出的算法可以快速准确地估计出真实的指向误差斜率,且对指向误差斜率的估计性能优于UKF算法。
图3 f =0.1 Hz时指向误差斜率估计

图4 f =0.5 Hz时指向误差斜率估计
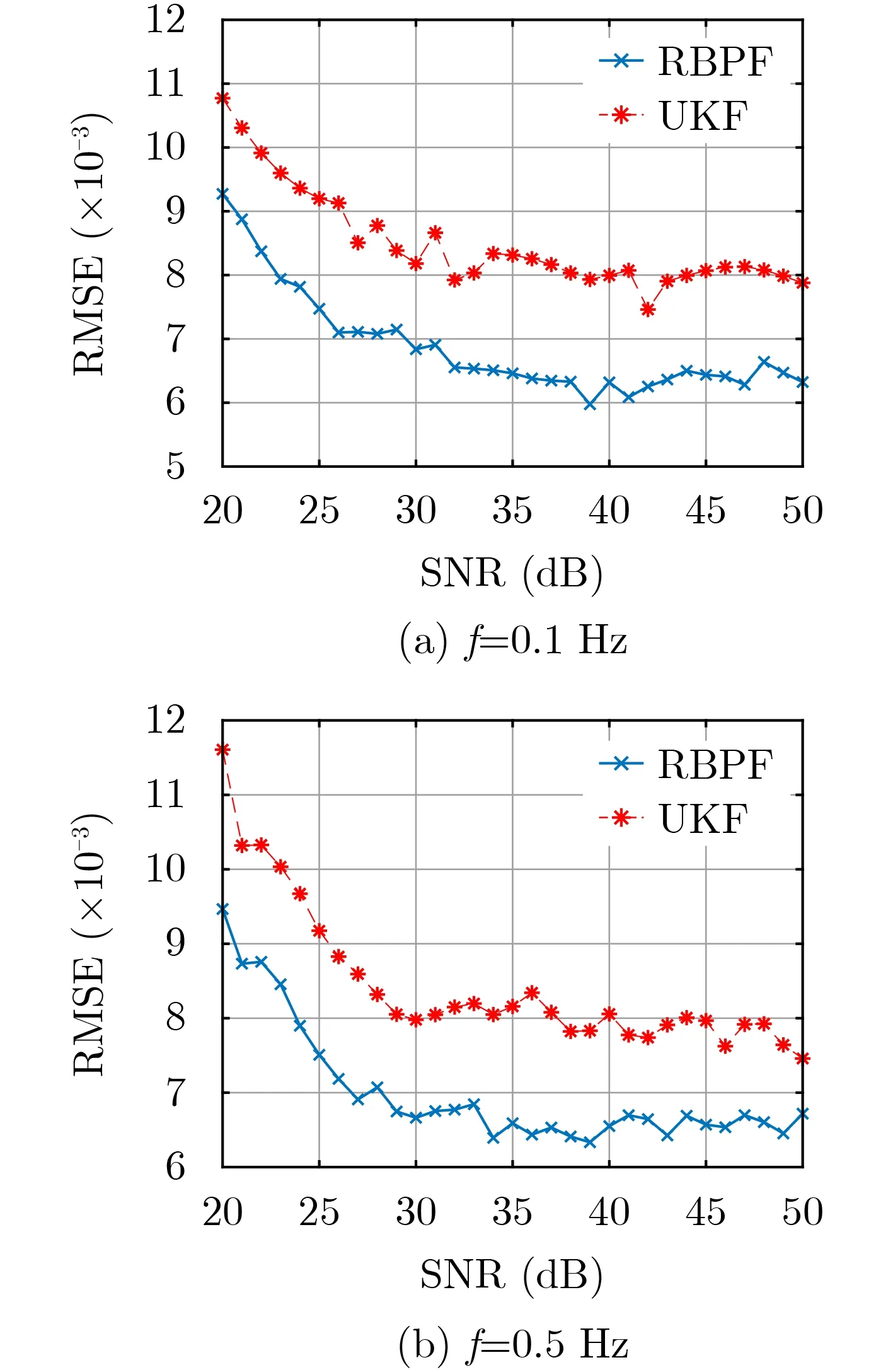
图5 指向误差斜率估值的均方根误差(RMSE)
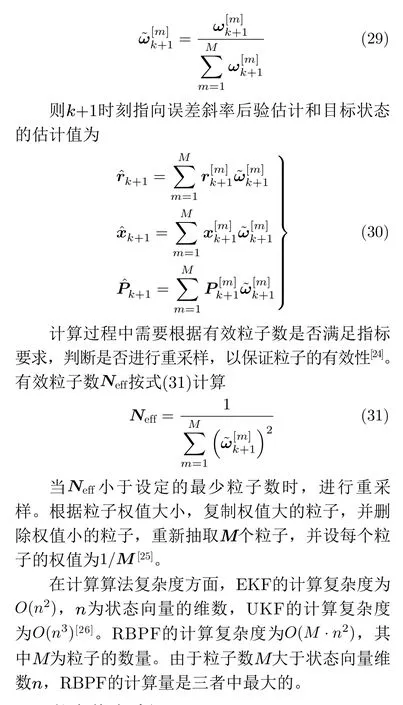
目标状态xˆk的估值误差见图6,目标状态估值误差的协方差阵计算结果见图7。在末制导过程中,目标位置估计误差和速度估计误差在0附近波动、没有发散现象,且图7中目标估值误差的协方差呈现收敛状态,表明了目标状态估计收敛、算法稳定。
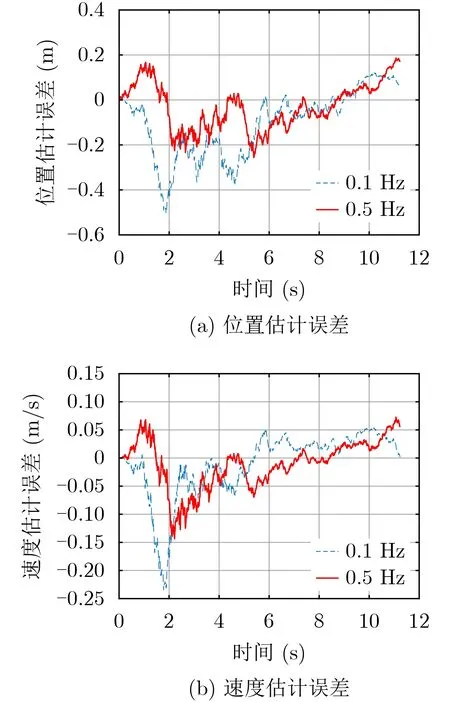
图6 目标状态估计误差
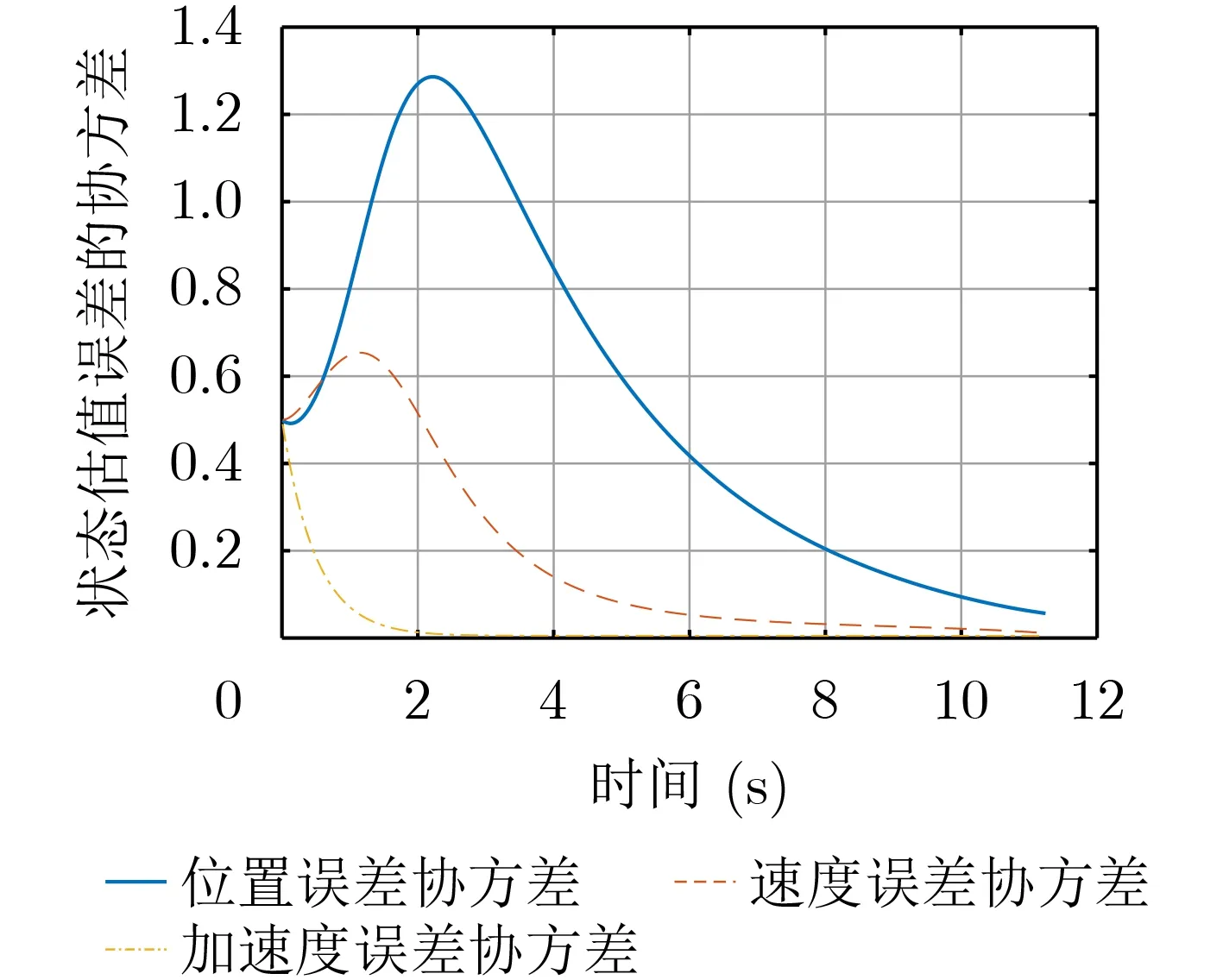
图7 目标状态估值误差的协方差
将采用RBPF算法得到的目标状态估计值xˆk代入导引律中计算导弹需用加速度,可得到平稳的、无振荡的加速度指令,利用此加速度指令控制导弹飞行可以保证制导系统的稳定性,制导飞行过程中导弹姿态角变化曲线如图8所示,攻击弹道如图9所示。可以看出,制导系统稳定性得到大幅度改善,脱靶量从20.13 m降至0.48 m,制导精度明显提高。
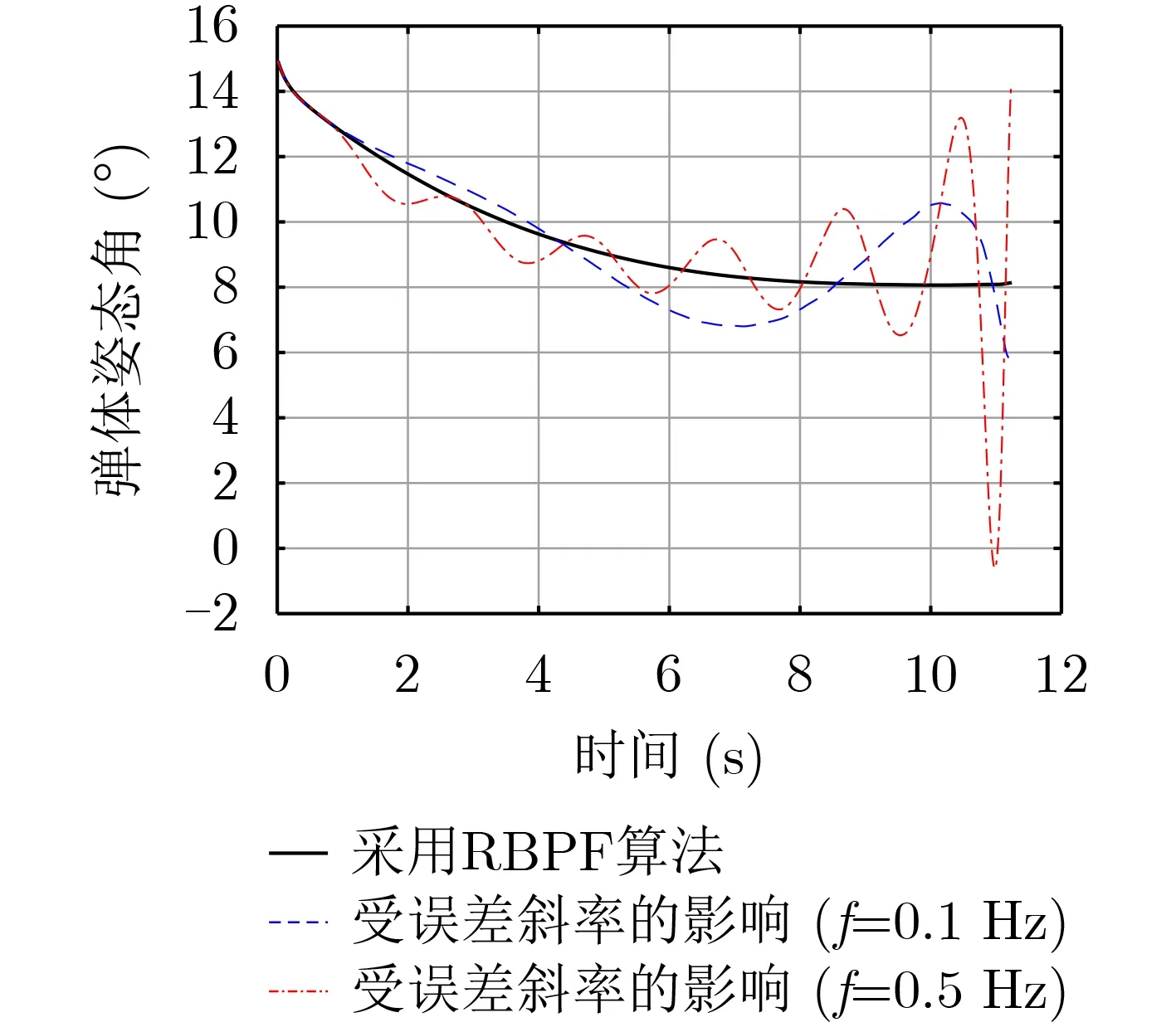
图8 导弹姿态角曲线
图9 导弹目标轨迹仿真结果(f =0.1 Hz)
6 结论
相控阵导引头指向误差斜率会带来严重的寄生回路耦合问题,影响导弹制导系统的稳定性和制导精度。针对这一问题,本文基于Rao-Blackwellised粒子滤波提出了一种相控阵导引头指向误差斜率和目标状态同步估计的新方法。
本文算法可以对导引头指向误差斜率进行有效估计,并同时准确估计出目标状态信息;利用此方法估计出的目标状态信息形成控制指令,可以消除寄生回路耦合振荡问题,提高导弹制导系统的稳定性和制导精度。
