多功能电动轮椅关键机构设计与仿真分析
2022-09-22邓援超朱天天段天卓
邓援超,皮 莹,朱天天,段天卓
(湖北工业大学,湖北 武汉 430068)
1 引言
近年来我国人口老龄化加剧以及存在一定数量残疾人[1-2],因此,为行动不便的老年人和残障人士提供及时、优质的医疗护理和生活保障是且应该是全民关注的重点[3]。在这一背景下,国内外纷纷开展各种电动轮椅的研究[4],期望对这一类人群的日常生活有所帮助。目前国内市场上的大多数电动轮椅功能比较单一,而国外市场上的电动轮椅发展水平比较先进,功能也比较全面,但是销售价格也很昂贵[5],对于国内大多数家庭来说是难以承受的[6]。为了让更多的老年人和残疾人使用到功能强大且价格便宜的电动轮椅,本课题从老年人和残疾人生理和心理需求出发,综合考虑结构、功能、成本等多种因素,本课题设计了一款功能全面、机构可靠而且价格又相对低廉的电动轮椅,能够实现自主移动、上下楼梯、跨越障碍物、床椅变换、自由升降、如厕等功能,不仅能为老年人和残疾人提供生活便利,还能满足他们的生理需求和心理需求[7]。
2 电动轮椅整体方案设计
电动轮椅主要有轮椅姿态和床姿态两种姿态,在任何一种姿态下均能通过升降机构来调节高度。电动轮椅的整体结构,如图1所示。电动轮椅整体为左右对称结构,由座椅机构、升降机构、靠背机构、脚踏机构等关键机构以及驱动系统、辅助轮、坐便机构等辅助机构共同组成。驱动系统采用一种将电机内嵌在车轮内的轮毂电机,其转矩和转速均可独立控制,相比传统驱动形式更加简便,更有利于电动轮椅整体结构布置。靠背机构和脚踏机构可以进行角度调节,靠背机构与座椅机构之间的夹角可以在(100~180)°范围内自由调整,脚踏机构与座椅机构之间的夹角也可以在(90~180)°范围内自由调整,使用者根据自身舒适度进行调节,最大极限位置时电动轮椅呈现床的姿态。当电动轮椅需要跨越障碍物或者使用者需要高处取物时,升降机构可以带动轮椅整体升降实现相应的功能。
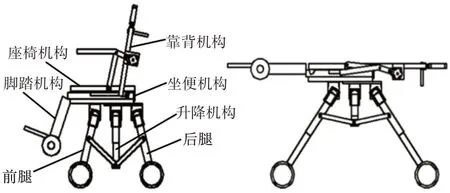
图1 电动轮椅结构示意图Fig.1 Structural Diagram of Electric Wheelchair
3 关键机构设计
3.1 升降机构设计
电动轮椅在跨越障碍物时或者使用者想要取到高处的物品时,需要改变轮椅的高度去完成跨越障碍物或者高空取物的动作,因此必须设计一种升降机构去实现该功能,由此设计了一种多电动推杆组合的升降机构,不仅能实现电动轮椅的整体升降,还增加了调整前后腿轮距的功能,保证轮椅在升降过程中稳定可靠,如图2所示。当电动轮椅在平地正常自主移动时,升降机构处于最低工位,位于前后腿中间的电动推杆处于完全推出的极限位置,此时前后腿轮距最小。当电动轮椅需要上升时,升降机构分两个步骤来完成轮椅的整体上升,首先通过中间固定的电动推杆6收缩带动连杆5和连杆8绕铰接点e旋转,推动两个轮椅腿向左右伸展增大轮距,当连杆5和连杆8成一条水平线并与电动推杆6垂直时,两个轮距达到最大值,保证了电动轮椅在上升过程中的安全;第二步再利用安装在轮椅腿部的电动推杆3和电动推杆10 推出实现轮椅整体的上升,此时升降机构处于最高工位。当电动轮椅下降时,轮距恢复到正常宽度,下降过程反之。
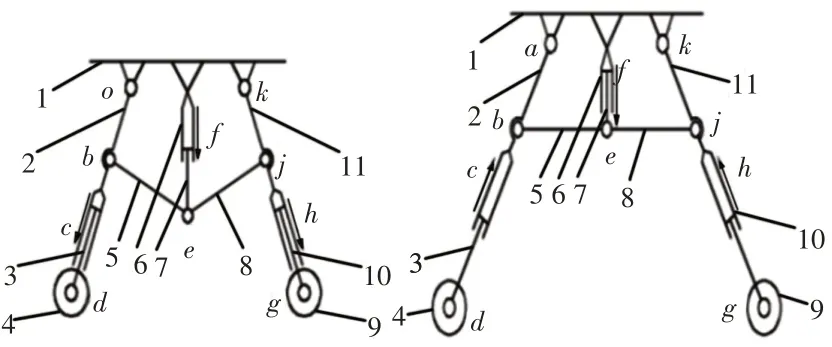
图2 升降机构运动简图Fig.2 Schematic Diagram of Lifting Mechanism
3.2 脚踏机构设计
电动轮椅呈座椅状态时,使用者的双脚可以放在脚踏机构上,脚踏承受人体一部分的重量。当电动轮椅从座椅状态转换成床姿态时,脚踏机构需要将脚踏连杆和踏板均运动一定的角度,使脚踏连杆、踏板和座椅在同一水平线上,实现轮椅向床的转换。根据需求设计了一种八杆组合机构,可以实现将脚踏连杆相对于座椅顺时针转动90°的同时,踏板相对于脚踏连杆逆时针转动80°,最终实现三者到达同一水平高度,如图3所示。电动推杆完全推出时脚踏姿态调节机构,此时脚踏连杆3 与轮椅座板1(机架)呈90°夹角,脚踏连杆3与踏板6呈100°夹角,电动轮椅呈座椅姿态,连杆7与连杆8共线,脚踏机构位于死点位置,对脚踏进行锁死。当电动推杆往回收缩时,电动推杆4带动连杆8绕铰接点h转动,连杆8带动连杆5和连杆7绕铰接点d和转动,连杆5推动脚踏连杆3绕铰接点a顺时针转动,连杆7带动脚踏板6绕铰接点c逆时针转动,当电动推杆行程到位时,脚踏板6、脚踏连杆3和轮椅座板1在一条水平线上,此时电动轮椅完成了从坐座椅到床的姿态调整。
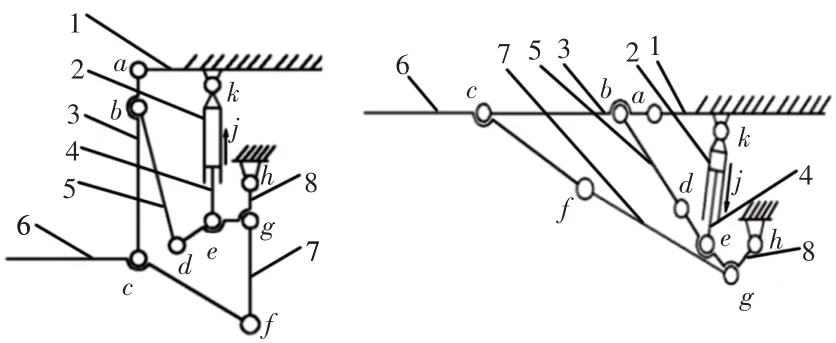
图3 脚踏机构运动简图Fig.3 Schematic Diagram of Pedal Mechanism Motion
4 关键机构运动仿真分析
Adams作为一款专业仿真软件,以多体系统动力学计算与求解为理论基础,可以建立复杂机械刚性体、柔性体以及刚柔混合的运动学和动力学模型[8]。Adams软件集建模、仿真和后处理与一身,包含多个基本模块和专业模块,因此选择Adams软件对电动轮椅中关键机构进行运动学仿真分析。
4.1 升降机构的运动学仿真
升降机构在运动过程中要求运动连续平稳,运动过程中不能出现卡顿、冲击,运动速度也不能过快,否则会影响电动轮椅的舒适性和安全性[9],因此需要利用Adams软件对升降机构进行运动学仿真,通过读取关键点的位移、速度、加速度等曲线,验证机构设计的合理性和运行的安全性。
将SolidWorks 建好的升降机构模型导入Adams软件中,对模型添加约束后,给电动推杆一个恒定驱动速度10mm/s,仿真时间为25s,得到后轮的位移曲线、速度曲线、加速度曲线,如图4所示;给升降机构连杆5和连杆8 的夹角一个测量值,得到该角度的变化曲线,如图5所示。
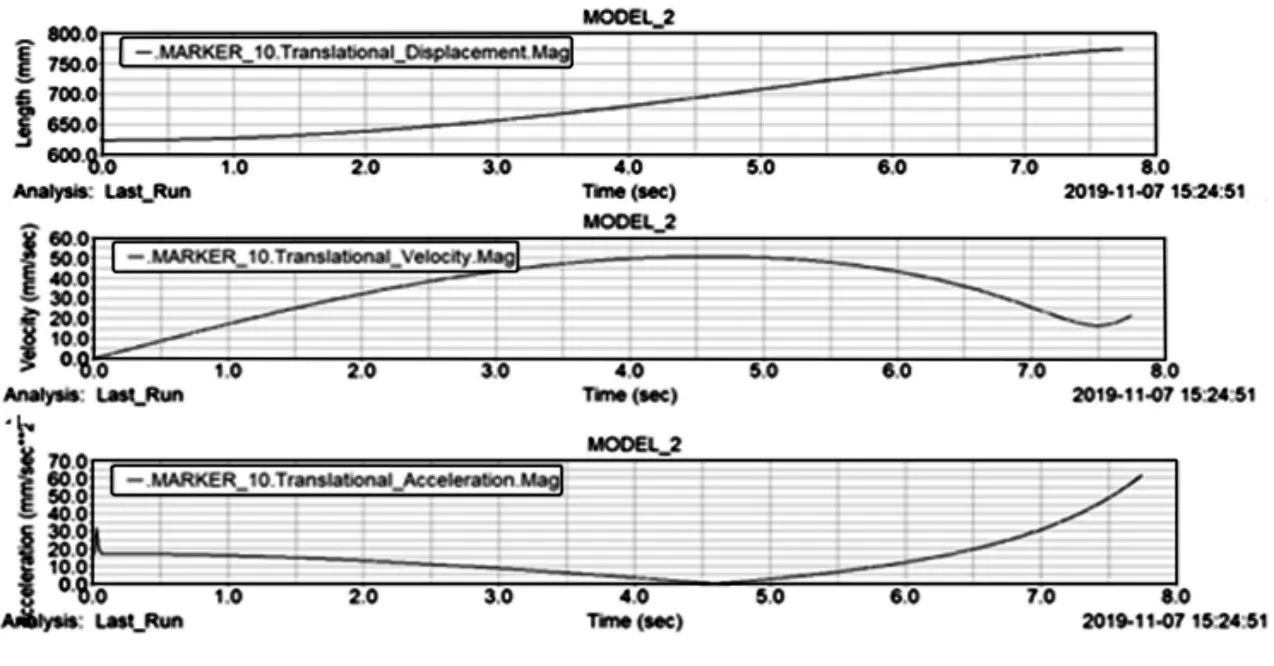
图4 后轮的位移、速度、加速度曲线Fig.4 Curve of Displacement,Velocity and Acceleration of Rear Wheel

图5 连杆夹角变化曲线Fig.5 Connecting Rod Angle Change Curve
从图4所示的后轮位移曲线中可以得到后轮位移从625mm增大到775mm,说明升降机构调整轮距的最大值为150mm,速度曲线变化平缓,加速度曲线在刚开始运动时出现一个小尖点,冲击较小,对轮椅的平稳性影响较小;图5所示的连杆夹角从110°平缓变化到180°,说明升降机构在整个运动过程中变化平缓,符合设计要求。
4.2 脚踏姿态调节机构的运动学仿真
脚踏姿态调节机构在运动过程中最重要的一点是要求脚踏连杆和脚踏板同时到达指定位置,与轮椅座板形成一条水平线,同时也要求运动过程中速度、加速度变化平缓,不能出现突变。将模型导入Adams中建好约束后,给电动推杆一个恒定驱动速度1mm/s,仿真时间为70s,得到脚踏板和脚踏连杆端点处的位移曲线、速度曲线、加速度曲线,如图6所示。给座椅1的夹角一个测量值ANGLE_1,给脚踏6与座椅1的夹角一个测量值ANGLE_1_2,两个夹角测量值的变化曲线,如图7所示。
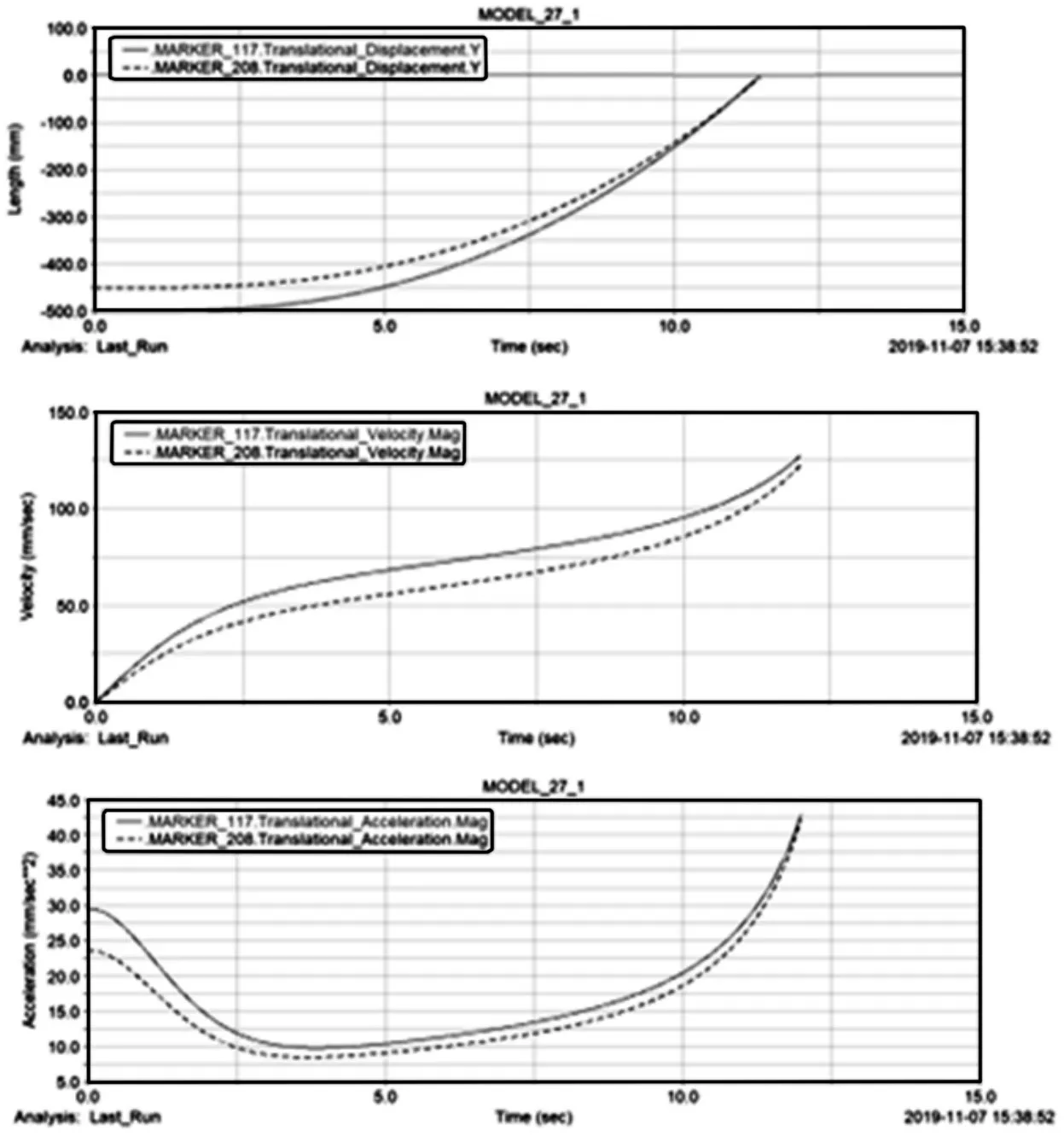
图6 两端点位移、速度、加速度曲线Fig.6 Displacement,Velocity and Acceleration Curves of Two Endpoints
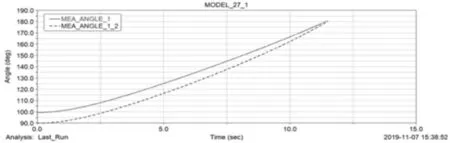
图7 夹角测量值变化曲线Fig.7 Variation Curve of Included Angle Measurement
如图6所示,脚板与脚踏连杆两个端点处的Y位移分别从-450mm和-500mm经过脚踏机构运动后同时达到0mm,两个端点处的速度曲线和加速度曲线都很相近且变化平缓,图7所示两个夹角测量值分别从90°和100°在运动中同时变化成并趋于180°,说明脚踏机构能够实现脚踏连杆与踏板同时运动且达到指定位置,而且运动过程中变化平缓无冲击,验证了机构设计的合理性。
5 关键机构的静力学分析
升降机构需要承受整个轮椅质量和使用者体重,其性能的优劣直接影响使用者的安全,所以需要对升降机构进行静力学分析,来验证升降机构在最高工位和最低工位时的强度是否满足性能要求,利用ANSYS workbench 软件对升降机构进行静力学分析。
为了保证升降机构关键零部件在外载荷的作用下能够安全可靠的工作,应使关键零部件的工作应力小于材料的极限应力[10]。升降机构关键零部件所使用的材料为Q235结构钢,其材料塑性较好,因此主要验证结构的强度是否满足要求,用第四强度理论对最大应力进行校核[10]:
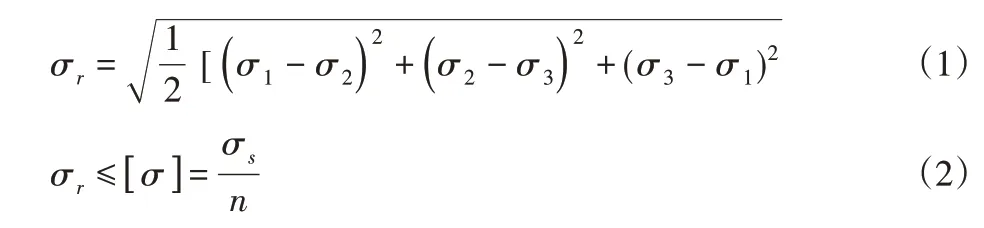
式中:σ1、σ2、σ3—某一点的三个主应力,且σ1>σ2>σ3;σ1—带数值最大是主应力;σ3—带数值最小的主应力;σr—最大等效应力;[σ]—许用应力;σs—屈服极限;n—安全系数。
查阅工程材料知,Q235的屈服强度σs=235MPa,查询机械设计手册后确定安全系数n=1.5,得材料需用应力为[ ]σ=156MPa,以此为参考标准校核升降机构的强度。
5.1 升降机构的静力学分析
当电动轮椅处于正常坐姿状态时,升降机构中间的电动推杆完全推出,而前后腿的电动推杆完全收缩,此时升降机构处于最低工况位置;当电动轮椅需要跨越障碍物或者变换成床姿态时,升降机构中间的电动推杆完全收缩以扩大轮距,前后腿的电动推杆则完全推出使电动轮椅整体升高,此时升降机构处于最高工况位置,对升降机构的这两种极限工况位置进行静力学分析。
将SolidWorks 中建立的升降机构模型进行简化后导入AN⁃SYS woekbench 中,忽略一些对整体力学性能影响较小的几何特征,材料属性选择Q235 结构钢,弹性模量为210GPa,密度为7850kg∙m-3,屈服强度为235MPa,之后对两种工况下的模型进行四面体网格划分,得到的装配体网格划分情况,如图8所示。

图8 升降机构模型网格划分Fig.8 Mesh Division of Lifting Mechanism Model
根据实际情况,对升降机构各个零件之间的连接关系添加一定的约束,根据实际情况,将螺栓固定连接的两个零件面之间添加的是bonded,在铰链与套筒之间添加的是frictional,铰链与铰链之间添加的转动副约束,最低工况时,对两个前腿导杆添加完全固定约束,最高工况时,在连杆与前后腿链接的铰接点处施加完全固定约束;通过solidworks 软件测量得轮椅的质量约为40kg,而使用者的体重参考行业内的承载情况确定为120kg,故对升降机构连接部分施加1600N 的载荷,两个工况下的约束和载荷,如图9所示。求解得到升降机构正常高度和最高位置两种工况下的应力云图,如图10所示。
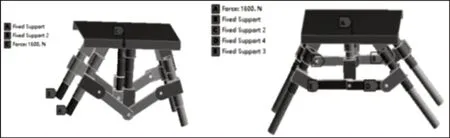
图9 升降机构模型约束和载荷Fig.9 Lifting Mechanism Model Constraints and Loads
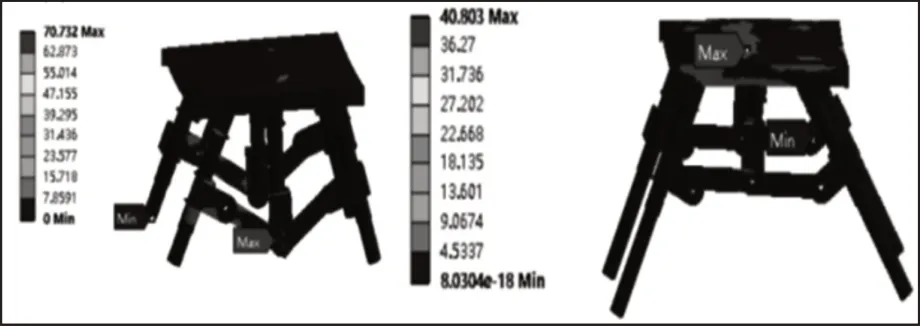
图10 升降机构应力云图Fig.10 Stress Cloud Diagram of Lifting Mechanism
升降机构在最低工位时,最大应力发生在中间电动推杆导杆与连杆铰接处,最大应力值为70.7MPa;升降机构在最高工位时,最大应力发生在座椅面板上,最大应力值为40.8MPa,根据选取的安全系数n=1.5,可得最大许用应力为156MPa,两种极限工况下的最大应力均小于许用应力,因此说明原方案结构设计满足强度要求。
5.2 脚踏机构的静力学分析
脚踏机构的踏板不仅在使用者坐在轮椅上时提供双脚一定的支撑力,在使用者上下轮椅时,踏板更是一个重要的且唯一提供支撑的过渡工具,在那一瞬间,使用者所有的体重都由踏板承受,因此非常有必要对此工况下的脚踏机构进行静力学分析,验证其强度是否满足要求。
同前方升降机构的静力学分析过程,将模型简化后选择对应的材料属性,对模型进行四面体网格划分,得到的网格划分模型,如图11所示。在踏板中间施加1200N的载荷,施加载荷模型图,如图12所示。求解后得到该工况下脚踏机构的应力云图,如图13所示。由脚踏机构的应力云图可知,最大应力发生在脚踏连板与座椅的铰接处,最大应力值为104MPa,小于许用应力值156MPa,说明脚踏机构强度满足设计要求。
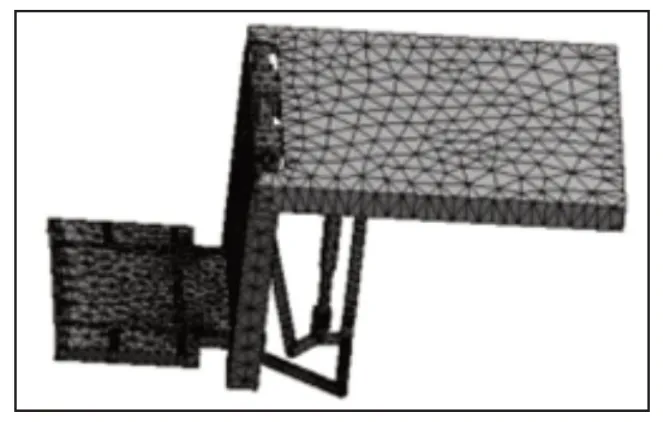
图11 脚踏机构网格划分模型Fig.11 Mesh Generation of Pedal Mechanism
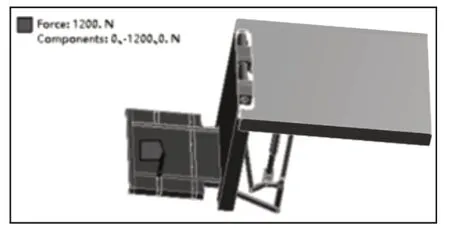
图12 脚踏机构施加载荷Fig.12 Loads of Pedal Mechanism
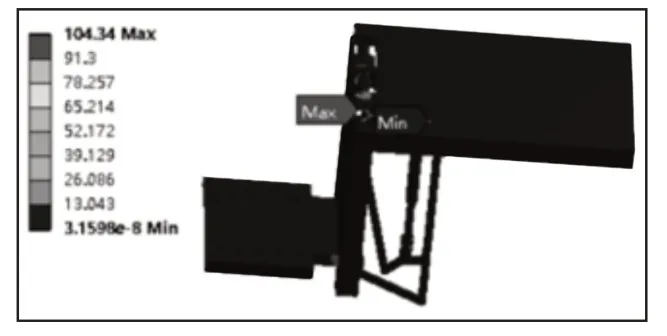
图13 脚踏机构应力云图Fig.13 Stress Nephogram of Pedal Mechanism
6 结论
通过对使用者功能需求的全面分析,设计了一款具有多种功能的电动轮椅,主要创新点如下:
(1)设计了多电动推杆组合升降机构和八杆组合脚踏调整机构,运动性能优良,更安全可靠;
(2)利用Adams软件对升降机构和脚踏机构进行运动学分析,通过位移、速度、加速度曲线显示结果分析,这两个机构的运动过程平缓无突变,验证了结构的可行性;
(3)利用ANSYS workbench 软件对升降机构两种极限工况和脚踏机构进行静力学分析,保证了升降机构和脚踏机构在各种功能状态下的结构强度要求。