数字经济下的高速公路路网无人巡检模式研究及实践
2022-09-21单华伟
单华伟
(哈尔滨航天恒星数据系统科技有限公司,黑龙江 哈尔滨 150028)
1 引 言
2021年12月国务院发布《“十四五”数字经济发展规划》,要求加快推进能源、交通运输、水利、物流、环保等领域基础设施数字化改造[1]。同时,交通运输部发布《关于加快推进新一代国家交通控制网和智慧公路试点的通知》要求,利用无人机等移动手段,开展路网大数据收集和综合管理,提升数据采集、传输、存储、分析、运用能力。以北斗高精度定位技术为基础,结合数字经济下对于交通运输等领域的基础设施数字化改造要求,开展基于北斗高精度定位的高速公路路网无人巡检模式研究,结合实际环境应用条件对境内高速、国道、省道、县道和乡村道路等开展例行常规巡查和重点区域详查监测,为智能化、高效化、便捷化的道路运输监管提供支撑。
2 北斗无人路网巡检模式
2.1 北斗卫星导航系统
2020年,我国自主研发的北斗卫星导航系统最后一颗卫星发射成功,顺利实现全球组网,其将导航与通信实现有机融合和创新,与美国的GPS系统、俄罗斯的GLONASS系统、欧盟的GALILEO系统共同成为提供全球服务的四大卫星导航系统,形成了世界卫星导航的新格局。北斗系统共有46颗在轨卫星,包括28颗北斗三号卫星和18颗北斗二号卫星,整个系统运行良好,信号质量优异。尤其是北斗三号卫星,其空间信号精度均值约为0.41 m,精度提升约30%。与其他导航系统相比,北斗系统的精度、定位、测速和授时能力更为优秀[2]。
同时,北斗三号实现了导航定位与通信和增强服务的融合设计,在导航定位之外还提供了星基增强、精密定位信息播发、区域短报文通信、全球短报文通信和国际搜救共6类服务。其中,导航定位、全球短报文、国际搜救3类服务覆盖全球,星基增强、区域短报文通信和精密定位信息播发服务3类服务覆盖中国及周边地区。
2.2 北斗无人路网巡检系统架构设计
依照北斗导航定位系统特点及路网养护需求分析,结合路网信息化建设中巡路查特点,基于北斗的无人路网巡检系统总体可划分为交通监管平台、无人值守多旋翼数据采集、垂直起降无人机数据采集、道路巡查移动平台四个部分[3]。整体架构如下。
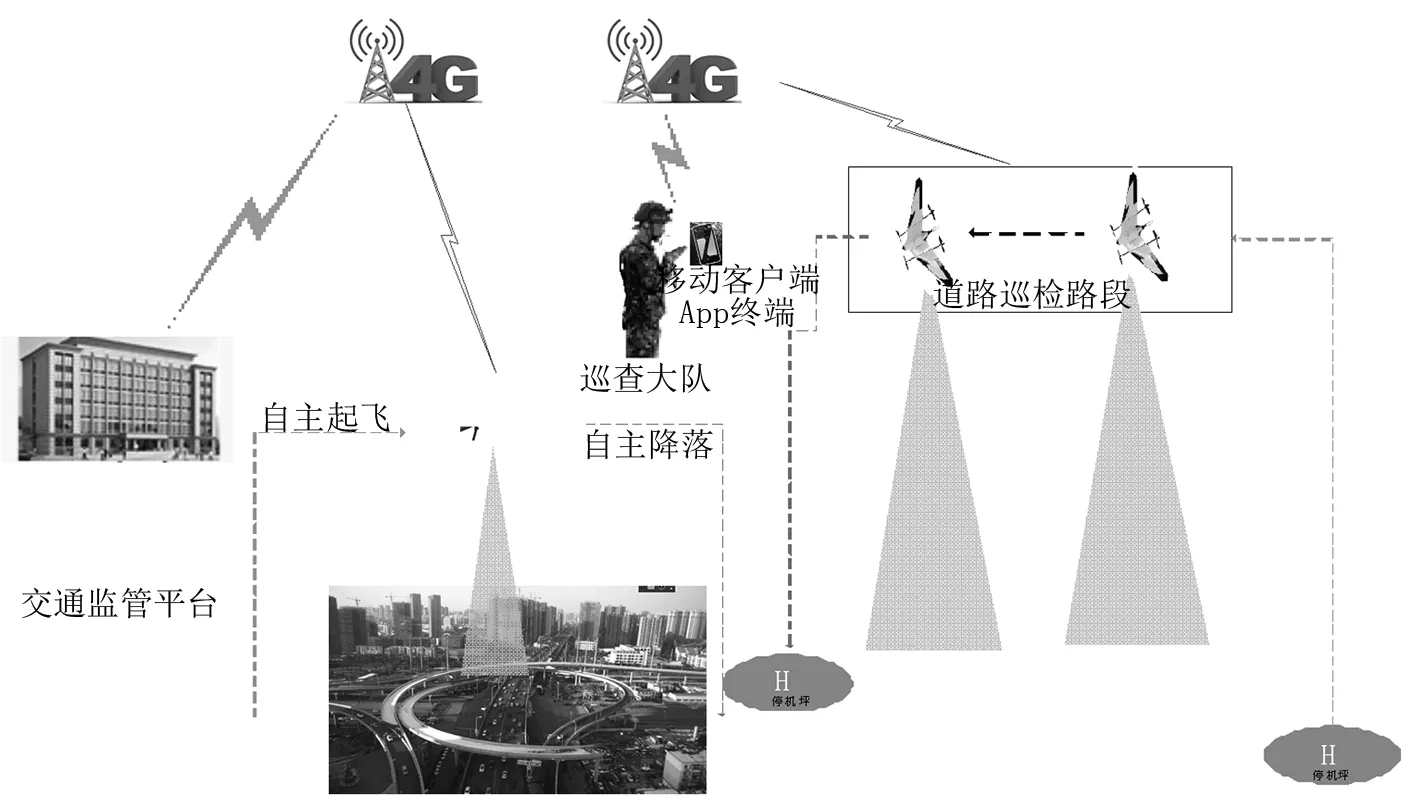
图1 北斗无人路网巡检系统架构图
(1)交通监管平台部分,包括平台运行的基础硬件设施、基础软件、数据库管理和道路巡查基础数据处理。
(2)无人值守无人机:以低空无人值守多旋翼以及无人值守垂直起降固定翼为基础,在巡查内容上划分为精细化巡查与长线路道路巡查。
(3)移动端:查看部分包括现场巡查大队手持数据回传与查看终端。
(4)网络通信基础部分:依靠4G/5G通信实现视频、遥测等数据传输,实现前方道路与后方平台的数据传输与状态监控。
(5)业务深化应用部分,包括道路巡查业务应用、对外公共应用,依据层次化、模块化设计理念,后期可为交通道路巡查监管部门提供道路业务综合监管等接口服务。
2.3 基于北斗高精度定位的无人巡检模式
基于北斗高精度定位的无人巡检模式主要包括五类,分别为常规巡视、重点巡视、定点监控、应急监控和移动监测,无人机日常自动巡视可以有效发现路面裂痕、塌陷、路基损毁、掉落物、事故拥堵、交通设施等情况,并可通过定点监测发现违章车辆并通过远程喊话进行远程指挥,具体如下所示。
(1)北斗无人机常规巡视
北斗无人机常规巡视模式面向常态化巡视监测需求,选取常规巡视路段通过飞机作业半径和实际地理、环境情况布设一定数量的系统,通过一站多机控制模式完成整条道路的常规巡视工作[4]。

表1 常规巡视经济巡检指标
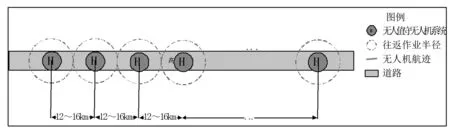
图2 无人值守无人机常规巡视布设示意图
(2)北斗无人机重点巡视模式
北斗无人机重点巡视模式针对道路交叉口、事故多发地或易拥堵的区域及路段的重点巡视需求开展涉及,主要是在无人机续航里程内通过合理规划无人机飞行航迹来覆盖巡视范围,如下图所示。针对一个5岔口的路口,可以归划无人机航迹经过每个岔口,并在中间悬停来观测路况。无人机在重点区域布设数量需要结合巡检频次来考虑停机舱/停机坪的选择。
针对重点区域,无人机单次巡检时间为0.5 h,其中悬停时间5~8 min,作业间隔为2 h,作业航程最大16 km,当重点巡视区域航程超过无人机最大作业航程或要求巡视间隔时间小于2 h时,可选择在重点区域布设多套无人值守无人机智能巡检系统。
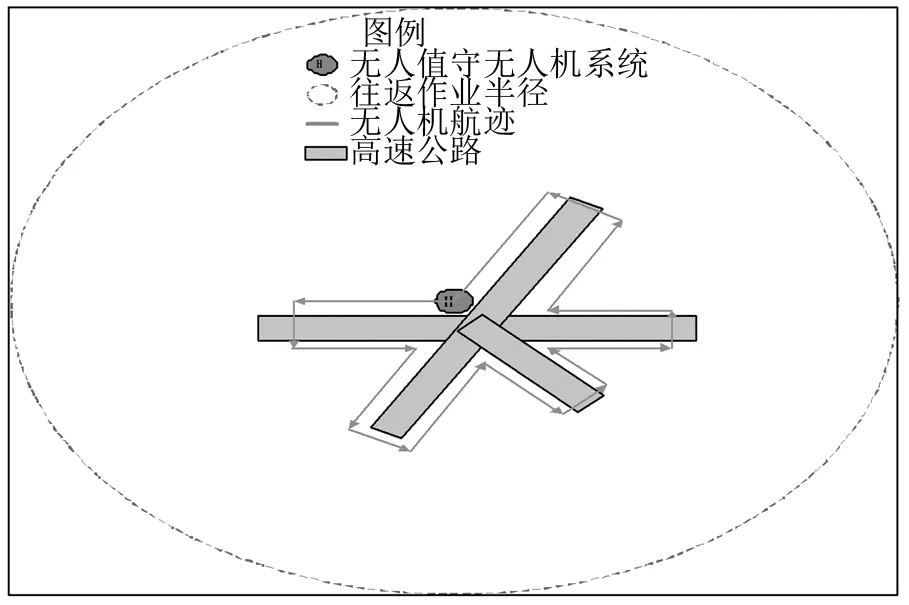
图3 无人值守无人机重点区域布设示意图
(3)北斗无人机应急监控模式
北斗无人机应急监控模式重点针对道路内出现的交通事故、人员伤亡、交通拥堵、塌陷、抛弃物等应急事件的应急监测应用模式,应急监测位置为随机事件,当需要应急的时候只需给出应急监测位置,无人机即可由当前位置按直线快速抵达应急点进行应急监测、指挥。
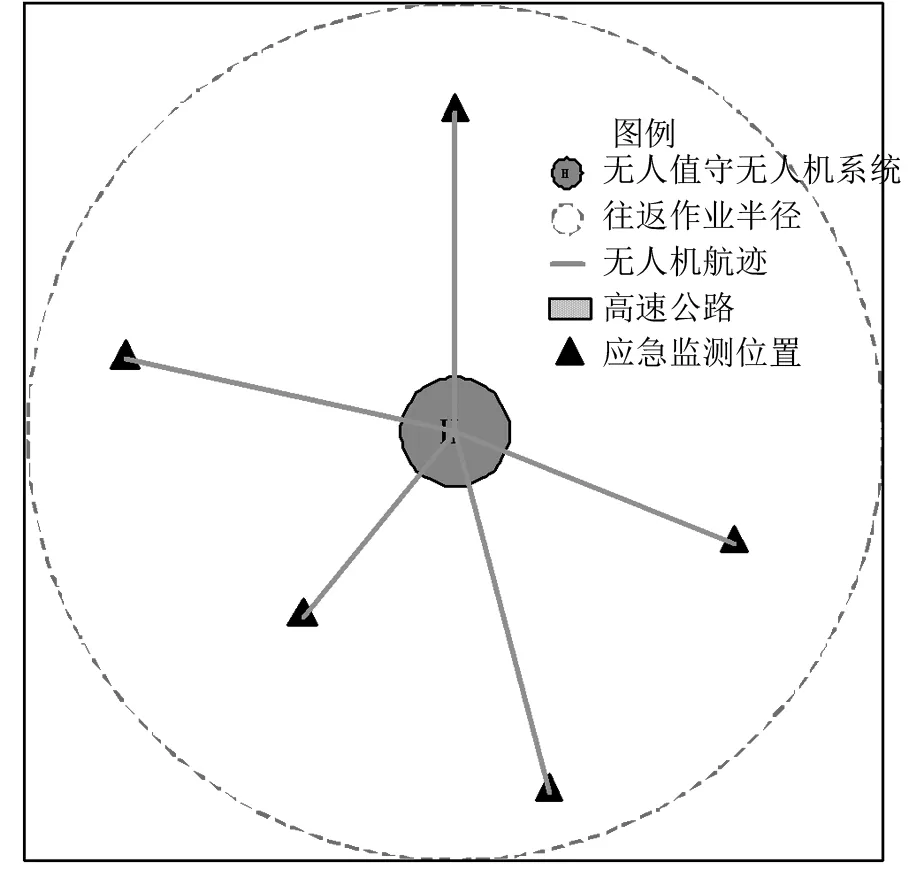
图4 无人值守无人机应急监测示意图
在应急监测应用模式下,后台控制中心可以任意调配距离事发地点最近的无人值守无人机(且距离小于无人值守无人机作业半径)直接飞往目标点,并进行观测。
(4)北斗无人机定点监控模式
北斗无人机定点监控模式是根据在常规、重点巡视过程中的发现异常情况或需要详细监测的区域而进行定点监控的应用模式,定点监控无人机在既定飞行航迹范围内,可进行短距离的位置、无人机飞行高度、监控方向和变焦等操控,可以实现精细化详查。
(5)北斗无人机机动巡视模式
北斗无人机机动巡视模式是将无人机放置于车辆内部,通过车辆运输无人机至指定区域进行飞行巡视,通过无人机系统对无人机进行操控,以实现无人机的动态监测应用。
3 北斗无人路网巡检模式实践应用
为对速公路路网无人巡检模式及系统的功能、性能进行验证,选取黑龙江省某省级公路开展应用示范建设,累计开展无人路网巡护37架次,初步实现了基于无人机的动态监测应用、养护决策及路网指挥调度,具体说明如下。
3.1 高速路网状态采集
采用常规巡护模式及重点巡视模式对路网状态进行信息监控采集,实现了公路路网路面裂痕、塌陷、路基损毁、掉落物、事故拥堵、交通设施等情况的采集,通过该模式改变以往单纯依靠人员及巡护车辆对路面进行养护信息采集及拥堵调查的模式,巡查成本可节省75%以上。
3.2 高速路网养护决策
采用应急监控模式辅以定点监控模式对事发地点、事件进行快速排查,辅以现场情况研判,实现公路路网塌陷、拥堵、违停等问题的综合处理,提升路网养护决策效率60%以上并极大降低了由于拥堵、事故导致的二次事故发生。
3.3 高速路网指挥调度
依托北斗无人机动巡视模式进行高速路网动态指挥调度,对偶发性事故或异常拥堵、阻塞情况进行详查,并可通过远程喊话系统实时进行指挥,提升偶发性事故处置效率70%以上。
4 结 语
随着数字经济发展规划及交通强国战略的稳步推进,对精细化、智能化的路网养护应用需求将愈发迫切,对路网无人巡检模式的应用系统将愈发细致,本文通过以北斗高精度定位技术构建无路网无任何巡护模式并开展探究应用,对后续交通强国战略及交通领域的基础设施数字化改造具备一定指导意义。
