轮腿复合式结构机器人的机械系统设计与分析
2022-09-19梁虎,罗强
梁 虎,罗 强
(重庆三峡学院 机械工程学院,重庆 404100)
0 引言
当前,车辆的创新主要体现在控制和软件方面[1],而在车辆车体结构上的创新较少.机器人的底盘结构决定了机器人的整体结构,进而决定机器人的性能.目前,关于机器人底盘结构的创新主要分为两种:四轮独立转向[2]底盘和轮足[3]复合结构底盘.本文提出的轮腿复合式结构机器人正是从车辆底盘的创新入手,从而实现机器人的多功能特性.
由于电动汽车和轮毂电机产业的快速发展,新型底盘结构应运而生,四轮独立转向底盘结构无疑是其中优秀的代表.四轮独立转向底盘使车辆的机动性得到了很大的提高.有关四轮独立驱动底盘的研究很多,如吉林大学研发的线控四轮独立驱动电动车[4],可实现原地转向、横向移动等功能.山东大学开发的一款四轮独立驱动电动车也可以实现以上功能[5].此外,美国航天局研发的模块化机器人汽车MRV[6],由4个称为eCorner的独立驱动的模块单元组成,每个单元可转动180°,通过线控方式实现每个车轮的转向和力矩控制.Protean Electric公司开发了一款名为“Protean360+”的轮毂电机转向模块[7].该模块集成了轮毂电机、逆变器、专用的液冷系统、摩擦制动盘和制动钳、特殊的转向以及悬架系统.一辆车的4个转向模块可以分别控制,单个转向模块支持连续转向超过360°.四轮独立转向底盘改变了车辆的转向结构,使车辆可以更加平稳地转向、泊车以及实现无人驾驶控制.
相较四轮独立转向底盘,轮腿复合式结构底盘的机动性能和越障能力更高.轮腿复合结构底盘在四轮独立驱动的基础上加入了足式结构单元,使得轮腿复合机器人具有了足式运动的能力,提高了机器人的多功能性.轮腿复合结构底盘又可以分为解决垂直方向越障能力的底盘结构和解决平面内避障能力的底盘结构.解决垂直方向越障能力的底盘结构即车辆的单轮像人或动物的脚一样可以上下运动,从而实现越障功能,同时可以改变底盘结构.典型代表有经典的漫游者探测车[8]、全地形六足星际探测机器人ATHLETE[9]以及法国LRP机构研制的机器人Hylos[10]等.这类结构的底盘解决了垂直方向的运动,但是很难再解决水平面内的运动,故其虽然可以在一些陡峭地形上行走,但是不适合应用于常规的车辆中.
本文提出的一种轮腿复合式结构底盘正是为了解决上述底盘不具备的能力,通过改变机器人的底盘结构,进而改变机器人前后轮距的大小,改变质心到前悬架和后悬架的距离,实现底盘的多种转换.同时四个轮子可以任意组合,形成不同使用功能的底盘结构,实现避障功能.其既可在不同宽度的道路上和场地中行走,也可以应用于农业耕作,在不同行间距的农田进行变距工作,甚至用于星球探测、家庭生活和仓储物流运输.
1 轮腿复合式结构机器人原理
1.1 机器人原理图
如图1所示,该轮腿复合式底盘结构机器人主要是由控制模块和机械模块两大系统组成.本文针对机械模块系统进行设计与分析,并最终制作出实验样机.

图1 轮腿复合式底盘结构机器人样机制作流程
图2(a)为本文设计的车体原理正视图,图2(b)为俯视图.图中A为主体;p1,p2,p3,p4分别为 4 个腿部转动关节;Q1,Q2,Q3,Q4分别为轮子连接处转动关节;B1,B2,B3,B4分别为 4 个转动支架;C1,C2,C3,C4分别为轮毂电机 (a)正视图关节.
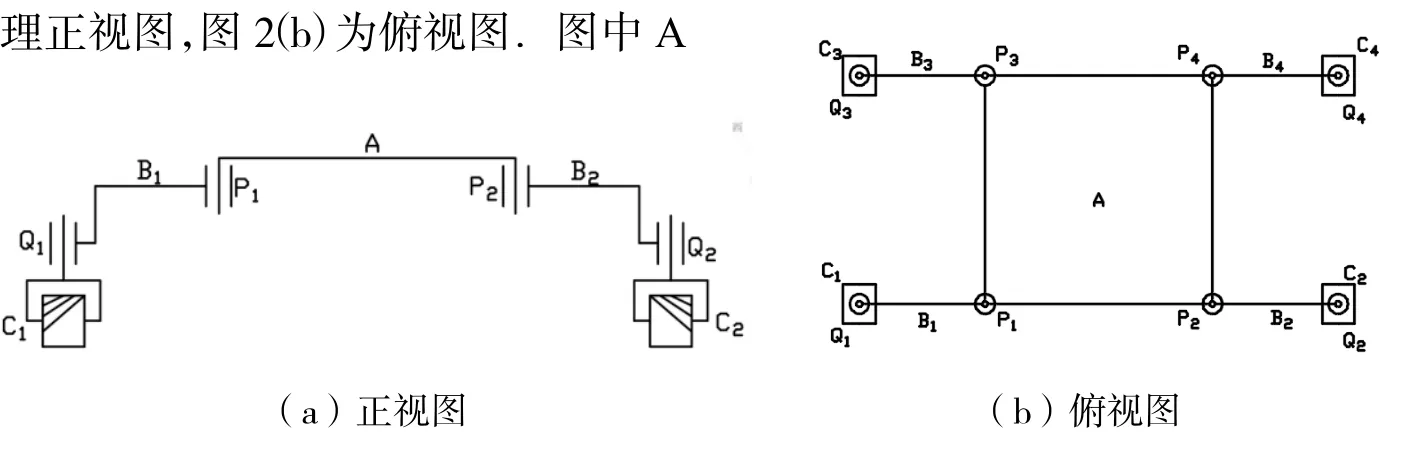
图2 轮腿复合式底盘结构机器人原理图
图3为本文设计的车体三维图.车体由4个轮毂电机、4个轮子转动单元、4个转动支架、4个腿部转动单元以及主体框架构成.轮腿单元可以通过减速电机进行360°转向,从而实现车辆底盘的改变,也可以进行避障运动.

图3 轮腿复合式底盘结构机器人三维图
1.2 机器人底盘结构
图4为轮腿复合式底盘结构机器人的功能图.其中l1为前后轮距,l2为左右轮距,a为车体宽度,b为摆臂长度,α为摆臂夹角,lr为后悬挂,lf为前悬挂,G为重心.
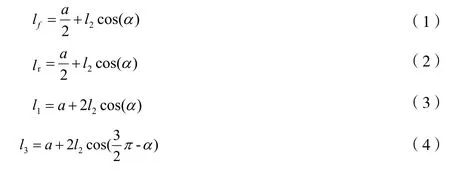

图4 轮腿复合式底盘结构机器人的功能图
参考图4,由公式可以看出,通过改变摆臂夹角不仅可以改变前后、左右轮距的大小,同时可以改变前悬架和后悬架距离,因而机器人具有多功能特性的同时还具有车体结构可变的特性.
轮腿的不同搭配可以形成不同种类的底盘结构,如图5所示.
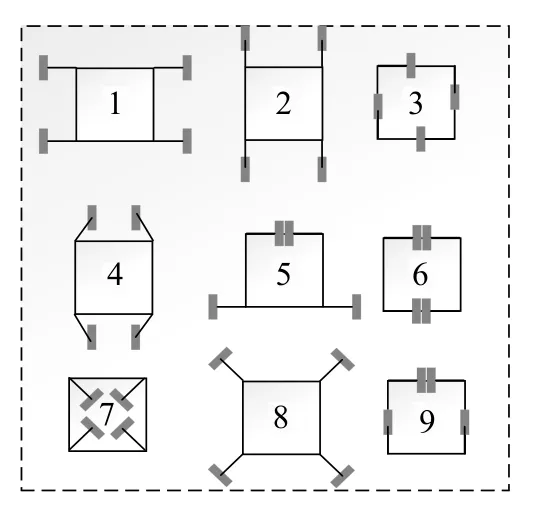
图5 不同的底盘姿态图
图6为车体变换过程中底盘的极限尺寸,具体数值如表1所示.
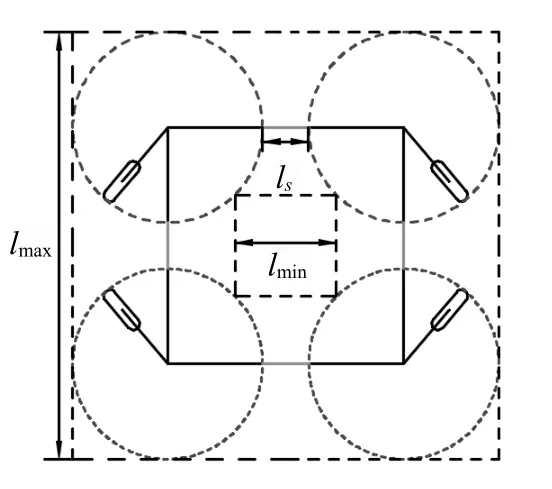
图6 车体轮腿可行域(车体底盘框架图)
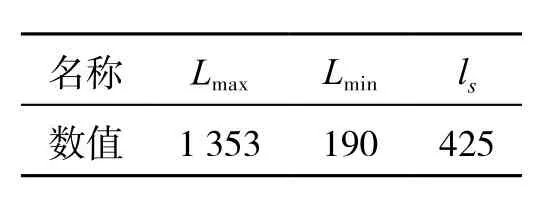
表1 轮腿可行区域尺寸单位:mm
2 腿部转动原理
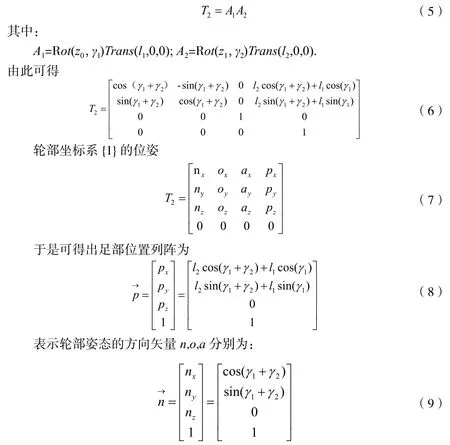
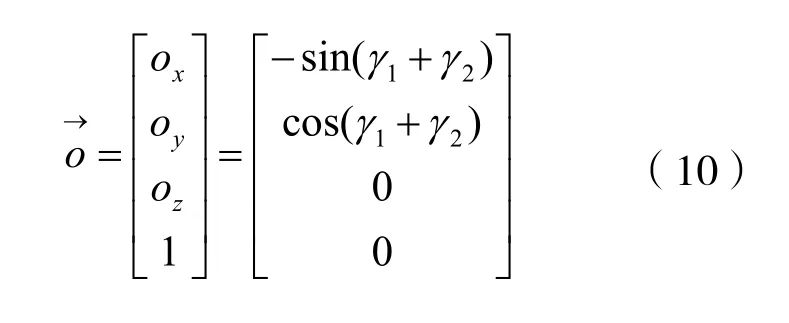
2.1 单腿正向运动学
如图7(a)、7(b)所示:A1矩阵表示第一个连杆坐标系相对于固定坐标系的位姿;A2矩阵表示第二个连杆坐标系相对于固定坐标系的位姿.那么第二个连杆坐标系在固定坐标系中的位姿可以用A1和A2的乘积来表示.

图7 机器人单轮腿的坐标系

2.2 单腿逆向运动学求解
如图8所示:
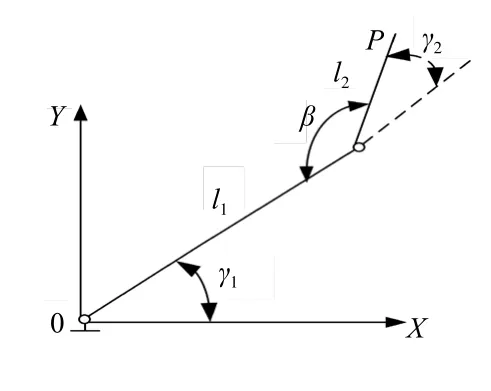
图8 求逆解坐标系

3 机器人基于阿克曼的两种转弯模型
Ackerman转向基本原理为:汽车在运行(比如直线驾驶和转弯驾驶)过程中,每个轮子的运动轨迹都必须与它的自然运动轨迹相重合,从而确保轮胎在地面上处于纯滚动而无滑移现象[11].
3.1 模型一
如图9所示,由其中的几何关系可得[12]

图9 模型一:阿克曼转向图

3.2 模型二
如图10所示,由其中的几何关系可得[13]
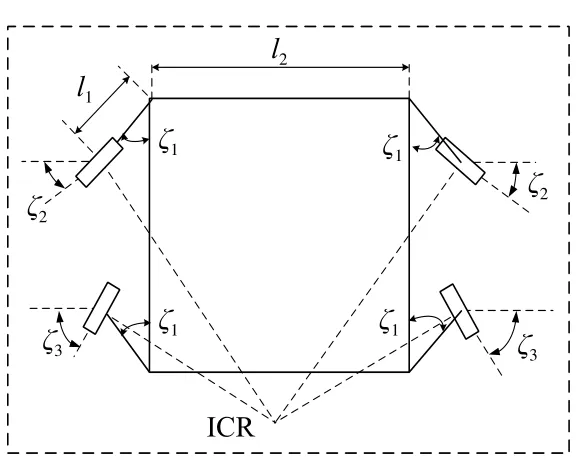
图10 模型二:阿克曼转向图

通过比较,可以看出前者适合大转弯半径,后者适合较小的转弯半径.比较两种模型同样可以看出,通过改变足轮的方向也可以改变转弯半径的大小和方向.所以,该车可以根据地形条件,在改变底盘结构的情况下,优化转向性能.
4 机器人越障性能和防侧倾性能
4.1 越障性能
如图11所示,车辆重力对支点M处产生的力矩W可以防止车辆在运行时侧翻.

图11 车辆越障原理图

由图12可以看出:车辆侧向车距越大,车辆重力产生的力矩越大.这就导致车辆在斜坡上行驶过程中更加稳定.
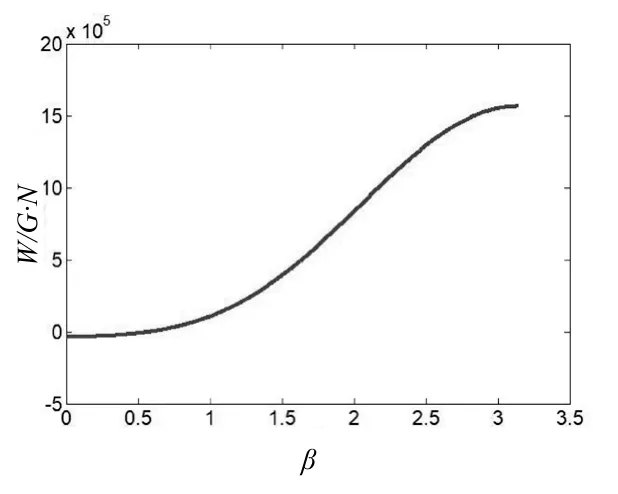
图12 翻转力矩随轮腿夹角的变化曲线
由图13可以看出:车辆在N点处的反作用力FN将影响车轮在该面上摩擦力的大小,进而影响车辆的运行.
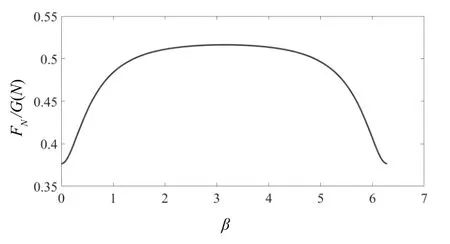
图13 反作用力FN随轮腿夹角的变化曲线

机器人侧向车距越大,车辆在坡面上产生的反作用力越大.这有利于提高车辆在坡面上的贴合度,从而产生更大的正压力,使车轮不易打滑.
4.2 防侧倾性能
如图14所示,根据几何关系建模
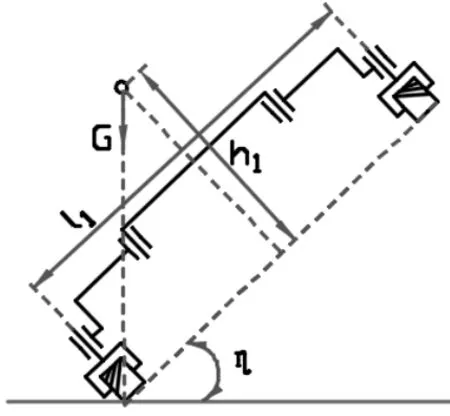
图14 车体侧倾原理图

其中l1=l3-2l2cos(β) .
由图15可以看出:随着轮腿夹角的变大,车辆的容许重心高度和容许侧倾角度都随之增大.这也说明机器人轮距越大,则其抗侧倾性能越好,也体现出该机器人可调节防侧倾的能力越强.

图15 重心高度和侧倾角度随轮腿夹角变化图
4.3 基于Adams软件的轮腿复合式机器人的越障性能分析
如图16所示,在不影响实验结果的情况下,对智能车进行适当简化,在Adams仿真软件中分别建立两种情况下的模型.观察图17可以看出轮距越大,机器人在越障过程中受到的作用力越平缓,则受力较小;而轮距较小时则相反.故机器人对轮距的调整可以很好地适应越障环境.
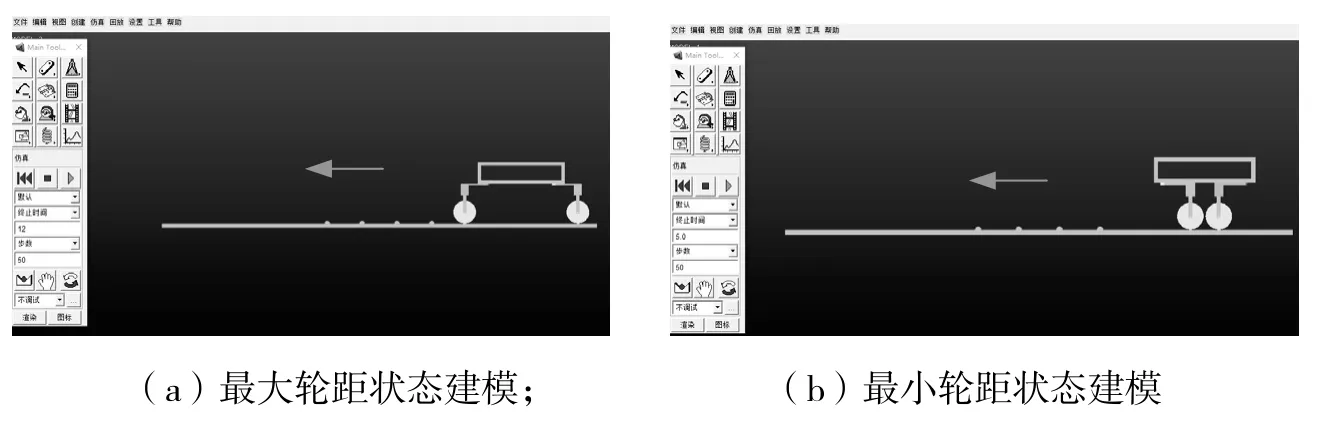
图16 轮距状态建模图
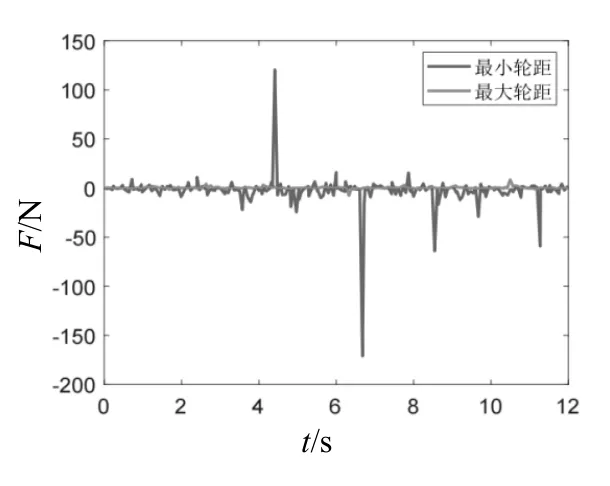
图17 最大和最小轮距状态下仿真实验数据图
5 结语
本文提出了一种轮腿复合式机器人,并制作了样机实物,如图18所示.该机器人底盘结构可以改变,从而实现避障、田间工作、仓储物流等功能.4个轮子独立转向驱动的设计使机器人可以灵活转向和移动;轮腿结构单元使机器人可以通过4个轮腿的转动配合和组合具备不同形式的底盘结构.对机器人的越障性能和防侧倾性能分析结果表明:该机器人具有优越的越障性能和防侧翻性能.
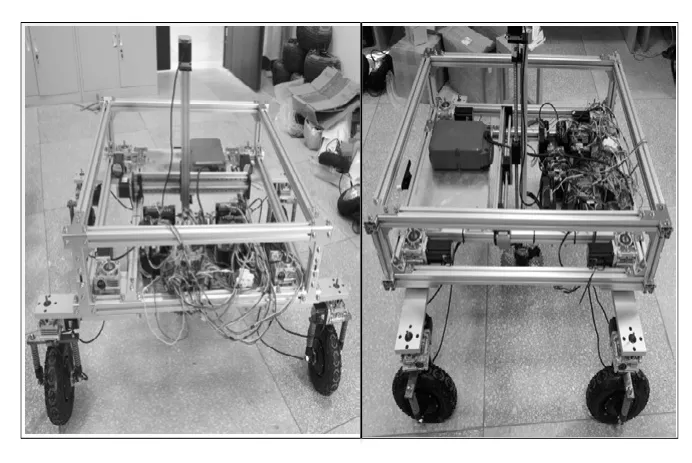
图18 轮腿复合式结构机器人样机正视图和侧视图
