基于改进Criminisi算法的油水两相流流场修复方法
2022-09-19韩连福付长凤刘兴斌牟海维
韩连福,陈 明,付长凤,刘兴斌,牟海维
(1.东北石油大学 物理与电子工程学院,黑龙江 大庆 163318;2.常熟理工学院 电气与自动化工程学院,江苏 常熟 215500)
由于油水两相流流场在石油开采中有重要意义,现存非接触式获取油水两相流流场方法主要为粒子图像测速技术(PIV)[1-3].但由于油水两相流流体本身分布不均,从而存在图像灰度差异明显、图像背景噪声多等问题,在利用PIV技术得到油水两相流流场时,尤其是当前普遍高含水油水两相流流场经常存在大面积空白矢量或错误矢量.这会对后续测井研究的准确性造成影响[4].
在PIV技术得到流场存在错误矢量并修复这一方面,任岩等[5]对错误矢量从产生原因进行分析,得出误差来源于设备曝光、示踪粒子分布、图像噪声等方面.岳延瑞等[6]针对PIV系统误差难以衡量提出PIV系统误差标定指标.吴龙华等[7]利用多推理Hopfield网络实现对PIV流场错误识别和错误剔除.高琪等[8]利用本征正交分解对低阶信号模态重构并以参考速度场为基本矢量对错误区域统一修正.王晓宇等[9]利用经验模态分解对速度场进行重构识别并剔除错误分量以提高精度.
上述方法对PIV流场错误数据修复有较好的效果,但对因油水两相流本身流体特质产生的空白矢量及错误矢量处理效果欠佳[10].本文利用图像修复Criminisi算法修复PIV错误流场,并针对Criminisi算法进行改进,以提高修复效果.
1 改进Criminisi的油水两相流流场修复法
本方法将图像修复中Criminisi算法应用到PIV所得油水两相流差错流场中,但Criminisi算法在应用中存在修复顺序不当及匹配不合理等问题,影响修复精度[11-12].为提高Criminisi算法的修复精度,本方法分别对优先级选择和匹配算法进行改进.其中优先级改进避免Criminisi算法因优先级计算降低对边缘和纹理的辨识能力;匹配算法改进引入局部引力思想降低匹配多个匹配块的可能性,以提高精度[13].改进Criminisi算法在PIV所得油水两相流流场中的修复步骤如下:
(1)输入PIV技术所得流场并预处理,如尺度变换等,对流场按照水平方向和竖直方向分别处理,得到水平流场U、竖直流场V.以水平流场U为例,在水平方向流场中对空白矢量和错误矢量进行识别.由于空白矢量和错误矢量值往往与周围流场有很大差别[14],如式(1)所示.其中δmin取0.1,δmax取5,Uq为q处9*9范围内水平流场平均值.

将空白矢量和错误矢量去除后,缺损部分如图1所示.其中K为已知区域,R为未知区域,∂R为缺损边缘,不同灰度代表速度大小不同.根据优先级计算公式(2)计算缺损边缘各点优先级大小,其中α取2,P(p)为p点处优先级,D(P)为p点数据项,表示p点处速度变化趋势,C(P)为p点置信项,|Rp|表示p点缺损块总体面积,a为归一化因子,np为缺损边缘∂R与p点的正交向量,其中Ip表示点p点等速度线方向.
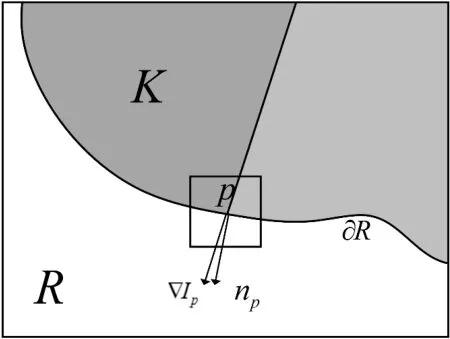
图1 缺损流场与已知流场示意图
该优先级计算公式以在流场修复过程中置信项越大则已知信息越多,理论应优先修复为原则,避免出现原优先级计算式(3)中由于数据项太小导致置信项在优先级判断上作用较小的现象[15].

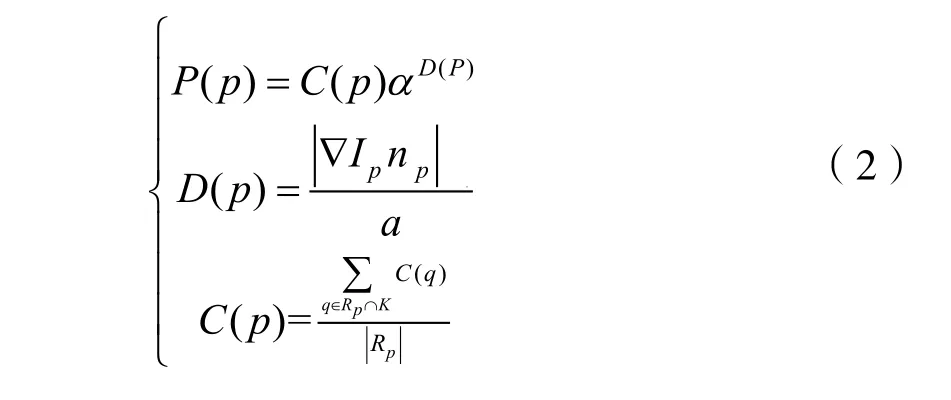
(2)确定最大优先级边缘缺损点p,确定对应缺损块,引入局部引力思想,将速度视为质量,依次计算该缺损块中心点与缺损块内部其他已知点下在水平和竖直方向的力[16-17].图2为以速度值类比质量计算p1、p2间力示意图.g为常数取1,v1、v2为两点速度,d为两点距离,θ为d与水平方向的夹角.为简化运算,由滤波因子公式(5)通过公式(6)进行运算,得到此缺损块已知区域下水平引力FRx和竖直引力FRy,合力与水平方向夹角为θR.
图2 两点之间的引力计算


(3)在已知区域内进行遍历,计算等大匹配块对应区域内水平引力FKx与竖直引力FKy及其合力与水平方向夹角θK.利用公式(7)得到最佳匹配块,其中β取π/12,如图3所示.

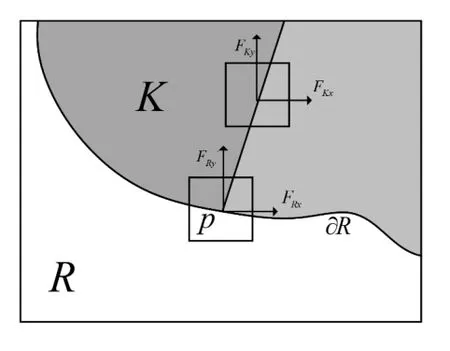
图3 流场最优匹配
该匹配准则利用局部引力思想通过计算缺损块与匹配块中心点速度与其他对应点速度之间的引力,分别得到缺损块与匹配块的结构特征.通过角度阈值及数值最小判定,得到在已知区域中与缺损块在结构上和数值上的最优匹配块,与原算法中仅判断匹配块之间灰度值差别有明显改进.
(4)将最优匹配块对缺损块进行填充,并重新计算剩余缺损边缘优先级.
(5)重复步骤(2)~(4),直至缺损区域面积|R|为0,算法停止.修复竖直方向,流程相同.两流场修复结束后统一输出以流场形式表示,算法结束.
2 流场修复仿真
为验证本文提出的基于改进Criminisi算法针对流场的修复效果,先对仿真流场图4进行人为缺损,如图5所示.随后分别利用传统Criminisi算法与改进Criminisi算法进行修复,对比修复结果.
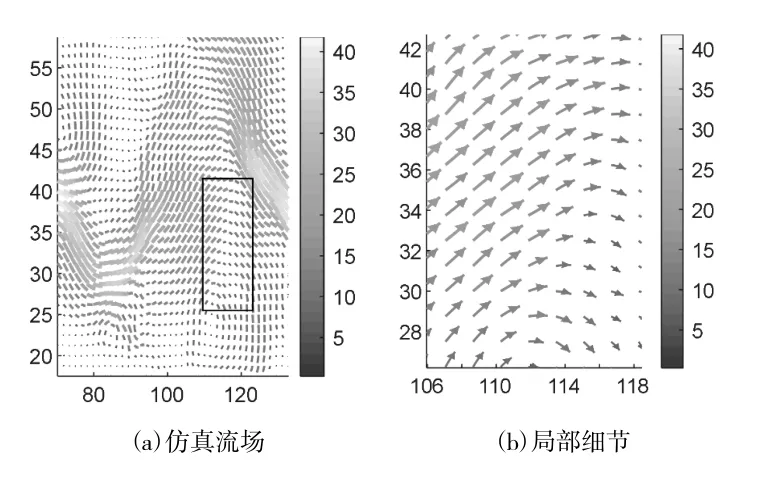
图4 流场仿真图
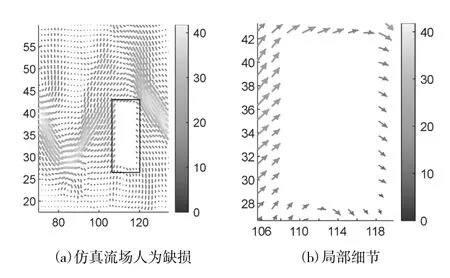
图5 缺损流场图
由图6可知,Criminisi算法在修复缺损流场中由于未考虑匹配时的结构关系,出现了部分缺损区域修复后不平滑的现象.同时由于优先级选择不当,修复顺序存在问题,部分缺损区域修复完毕后比周围区域数值要大.而图7中由改进算法得到修复后的流场更平滑,较符合流场实际情况.
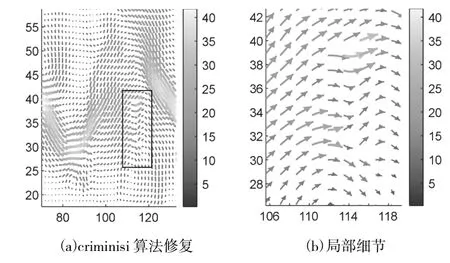
图6 criminisi算法修复流场
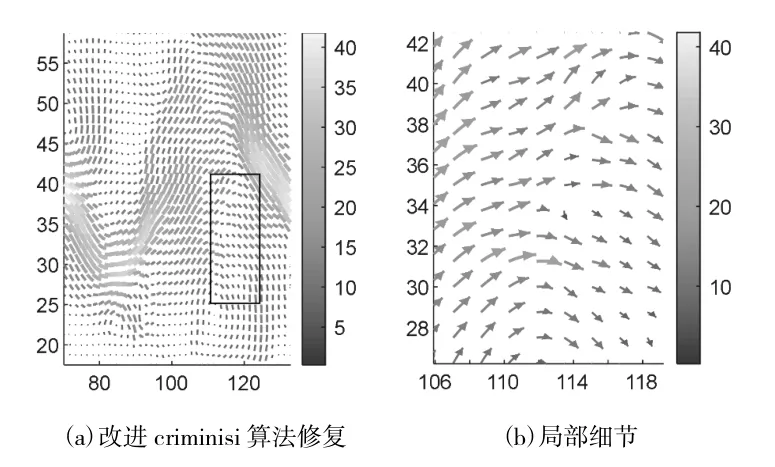
图7 改进criminisi算法修复效果
为了量化改进算法与传统算法的修复差异,本文利用的对比指标有均方根误差、峰值信噪比、修复时间、平均绝对误差、加权峰值信噪比.由表1可知,改进Criminisi算法相较于传统Criminisi算法均方根误差降低43.653%,峰值信噪比提高6.182%,平均绝对误差降低23.538%,加权峰值信噪比提高7.818%.这些指标表明改进Criminisi算法的修复效果比传统Criminisi算法的修复效果好.虽然改进Criminisi算法修复时间较长,比传统算法用时增加44.280%,但仍小于0.500 s,在可接受范围内.同时在主观评价上,改进Criminisi算法在缺损区域的修复效果比传统Criminisi算法更平滑,更符合流场规律.因此,从对仿真缺损流场修复效果来看,改进Criminisi算法有一定实用性.
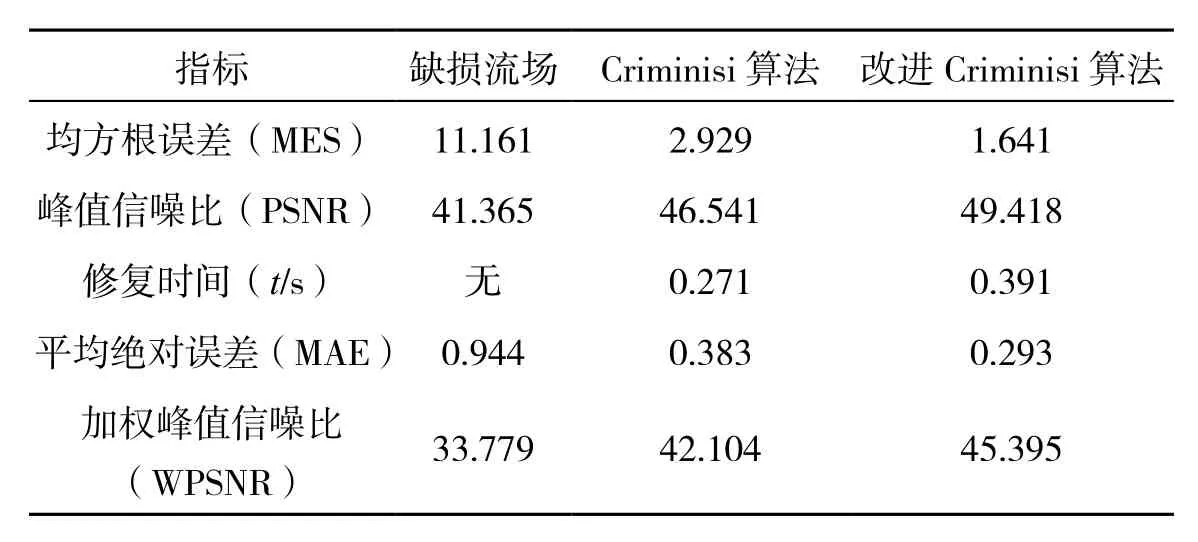
表1 算法效果对比
3 实际流场修复
为了验证改进Criminisi算法在实际油水两相流流场中的修复效果,首先要对油水两相流图像进行采集.本方法利用模拟水平井PIV图像采集平台,如图8所示,主要包括:(1)高速摄像机和光源组成图像采集模块;(2)由油罐、水罐和依靠密度进行分离的分离罐构成油水分离系统;(3)稳流段和测量主体测试段;(4)由计算机、控制器及对应开关组成数据处理及系统控制模块.测量过程中,利用控制器控制开关将不同比例油水输入混流段,经稳流部分稳流后,混合油水两相流流动基本呈稳定状态.高速摄像机在测试段在适当光照下采集到油水两相流流体图像.采集后两相流经分离罐分离至油罐和水罐,实现系统循环.其中在PIV流场获取中油滴做示踪粒子.
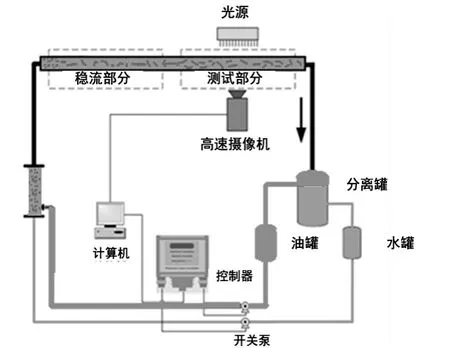
图8 油水两相流图像采集实验平台示意图
为了验证基于改进Criminisi油水两相流流场修复效果,选取了工况为5 m3/d-80%的含水率下PIV得到的流场图进行修复.实验中利用控制平台控制流速及含水率生成的工况为流速5 m3/d,含水率为80%.
由图9连续两帧图可知,5 m3/d-80%工况下存在大油泡现象.其中大油泡位置若仍利用油滴作为示踪粒子,则利用PIV获取油水两相流流场会得到图10中框选区域所出现的大量空白矢量.空白矢量的存在会影响平均速度计算精度.

图9 5 m3/d-80%的含水率油水两相流连续两帧图
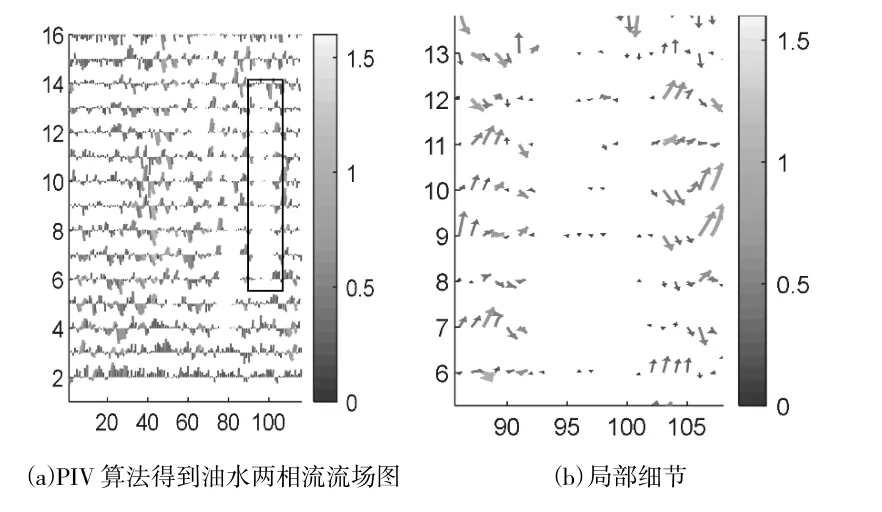
图10 PIV算法获得流场
图11中,利用改进Criminisi算法对图10中空白流场进行修复后,观察同一框选区域可知:改进Criminisi修复算法在修复空白流场时符合流场运动规律,对空白部分的修复较为平滑.该工况下油水平均速度为0.200 m/s,利用普通PIV得到的平均速度为0.185 m/s,误差为0.015 m/s.利用改进Criminisi算法得到的平均速度为0.203 m/s,误差为0.003 m/s,缩减了由流场对平均速度计算时产生的误差.
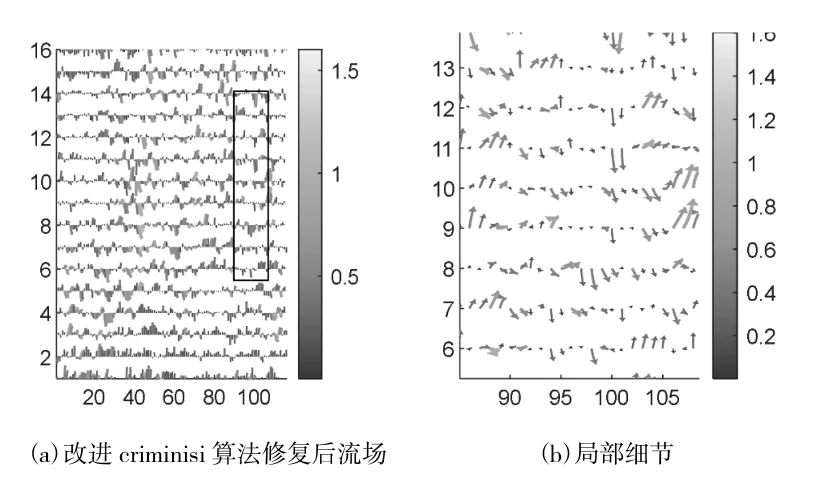
图11 改进criminisi算法修复后流场
为避免单次流场修复产生的偶然性,我们又在该工况下进行了多次实验,如图12所示.证明了改进Criminisi算法在油水两相流流场修复中的可用性,且由于流量小时无须考虑油水两相的滑脱速度[18],因而改进Criminisi算法修复油水两相流中不会掩盖其本身的真实性.
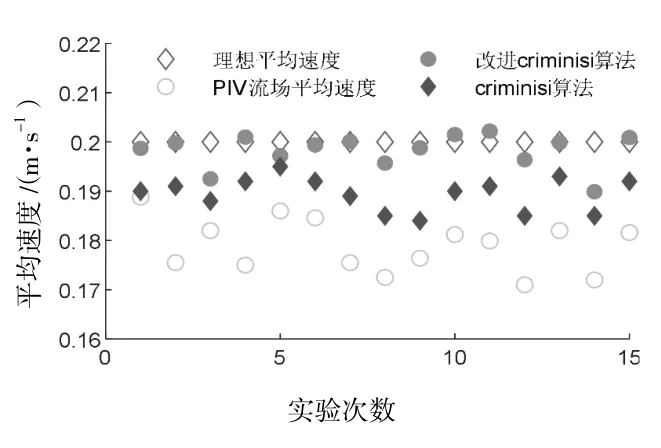
图12 多次实现结果对比
4 结语
本文提出了一种基于改进Criminisi的油水两相流流场修复算法,通过仿真验证与具体实验得出以下结论:
(1)图像修复Criminisi算法迁移到流场修复过程中具有可行性.流场结构类比图像,流场按照水平方向和竖直方向分离,得到两份单向流场分别按照改进Criminisi算法进行处理,处理后结果对大面积错误流场和空白流场进行了合理的修复.
(2)改进Criminisi算法在对油水两相流经PIV得到的流场具有修复作用,使PIV所得油水两相流流场更接近实际流场,且修复效果要优于未改进Criminisi算法,可用于对已有PIV所得油水两相流流场进行后期处理.
(3)利用改进Criminisi算法仍具有一定的局限性.当不存在最佳匹配块即油水两相流局部相差大或所得流场空白过大时,改进Criminisi算法无法进行准确修复.故本方法适用于经稳流后的油水两相流流场.
