基于高空视频图像的山地城市信号交叉口到达车辆运行特征分析*
2022-09-15张高峰刘小明尚彦宇徐进
张高峰 刘小明 尚彦宇 徐进,3▲
1.重庆交通大学交通运输学院 重庆 400074;2.中铁二院工程集团有限责任公司 成都 610051;3.重庆交通大学山区复杂道路环境“人-车-路”协同与安全重庆市重点实验室 重庆 400074)
0 引言
城市道路信号交叉口是城市路网的重要节点,也是路网通行能力瓶颈和交通事故高发点[1]。与平原地区城市相比,山地城市由于地形条件限制,存在弯道和小半径路段多、起伏频繁,以及不规则路段交叉且狭窄等特点,更易发生交通拥堵和事故的情况。
交通流理论是研究交通流随时间和空间变化规律的模型和方法体系,而研究道路信号交叉口交通流参数如车头时距、车头间距和延误也是其重要内容之一。张惠玲等[2]提出了基于视频双截面的信号交叉口延误检测方法,能够对交叉口车辆进行实时检测。范宏强[3]基于元胞自动机思想分别构建了无信号控制下的T形交叉口、定时信号控制情景下的T形交叉口和X形交叉口仿真模型,并分析研究了城市道路交叉口处的流量和延误等交通流特性。
在足够多的观测样本和有效数据中,车头时距s或车头间距m和某一点速度v应具有某种相关性[4-5]。金晓琼等[6]通过实地调查研究后发现,不同交通流状态下车头间距呈现不同的分布特征。周娟等[7]通过统计和研究NGSIM轨迹数据,得出在不同车头间距情况下,车流速度服从不同分布。赵星等[8]通过大量实地测量和统计分析,对信号交叉口排队车辆通过停车线的车头时距、车型、转向对饱,以及车头时距的影响进行了研究,并建立了相应关系模型。徐进等[9]基于跨江大桥自然驾驶数据,筛选得到超过700条有效跟驰轨迹数据,通过分析车头间距和车头时距的分布特征,发现车辆跟驰行为在跨江大桥与城市道路中存在一定差异性。张智勇等[10]利用基于车载高精度GPS动态跟车数据采集方法获得反应加、减速跟车状态下车头间距的时间序列数据,分析发现车辆速度与前车车头间距之间是线性关系,与前车车头时距之间是指数关系。赖林等[11]结合交叉口实际采集数据,添加了2车车头间距与前车速度有关的加速度补偿项,优化了原有的速度模型并进行了验证。邵长桥等[12]通过大量统计分析交叉口排队车辆车头时距,得出排队车辆的车头时距服从对数正态分布。Satyajit[13]通过收集5个印度城市交叉口数据,对车辆的排放间隔进行了分析,并发现每个队列位置的车头时距分布遵循对数正态分布。王殿海等[14]通过布设在交叉口停车线位置处的高清摄影机得到自动车牌识别数据,并基于此数据构建出车头时距的高斯混合模型,提出了1种混合交通流饱和流率实时自动估计方法。目前,速度等参数影响车头间距的分布,在3个参数之间关系的研究中已经得以验证[15],车头间距作为微观参量与车辆速度密切相关。
虽然国内外学者已经对城市信号交叉口的车辆运行特征展开了大量研究,但由于所用方法多为自然驾驶实验,或是通过设置路侧固定摄像头来提取视频数据,往往会出现道路信息不全面、视频数据覆盖范围有限等问题。而高空视频图像具有监控范围广、信息采集多样化、效率高等优势[16],其追踪到的数据具有随机性、连续性和真实性,同时可以产生大量的数据样本[17-19]。为此,本文通过无人机拍摄的高空视频图像数据对山地城市信号交叉口车辆运行特征进行研究,基于车辆运行时空图对信号交叉口车辆的停滞延误以及停止线位置车辆的车头时距、车头间距的统计特征进行分析,并建立车头间距与车辆停车线位置速度和道路平均坡度的关系模型,进一步明确车辆在不同路段类型、不同阶段的运行特征,即可作为反馈信息为后续信号交叉口道路交通优化、交通仿真等提供一定的数据基础和理论支撑,进一步完善对山地城市信号交叉口车辆运行特征的系统研究。
1 交通视频采集与预处理
1.1 交叉口选取
本次实验选取重庆市南岸区和巴南区6个信号控制交叉口为实验对象,主要平面形式包含2种:5个为十字形交叉口,1个为X形交叉口,进出口道纵坡形式包括上坡、下坡和缓坡,坡度变化范围为[-7.2o,8.5o],为典型的山地城市道路信号交叉口。图1为实验交叉口的俯视图,表1为交叉口及其相交道路的主要技术参数。

表1 交叉口相交道路主要技术参数Tab.1 Main technical parameters of road intersections

图1 实验交叉口俯视图Fig.1 Top view of experimental intersections
1.2 实验设备与实验流程
本次观测实验利用无人机进行交通视频数据的采集,其型号为大疆御mavic2 pro专业版,同时利用Syntke数字坡度仪和轮式数显测距仪,采集各交叉口相交道路各位置的坡度、位置距离等数据,见图2。在实验交叉口通过手机控制无人机上升到指定位置和高度,拍摄3~5张交叉口照片后进行视频录制。图3为无人机手机操作界面,可实时调整拍摄角度。为了兼顾拍摄范围、车辆识别程度和限高区域等要求,无人机在各交叉口飞机高度因其实际环境的不同而进行相应的设置。

图2 无人机与实验测量仪器Fig.2 UAV and experimental measuring instruments

图3 手机操作界面Fig.3 Mobile phone operation interface
1.3 图像数据预处理
将无人机采集的视频数据上传到Datagrams AI视频分析平台,然后通过Datagrams Viewer对视频中提取的内容进行分析,输出数据包括当前实时速度、车辆行驶轨迹、可配置的闸门计数(行进和占用时间、车距、车头时距、车头间距、流量估算等)及其他统计信息等,见图4,其中车辆速度数据均为个体车辆的速度。
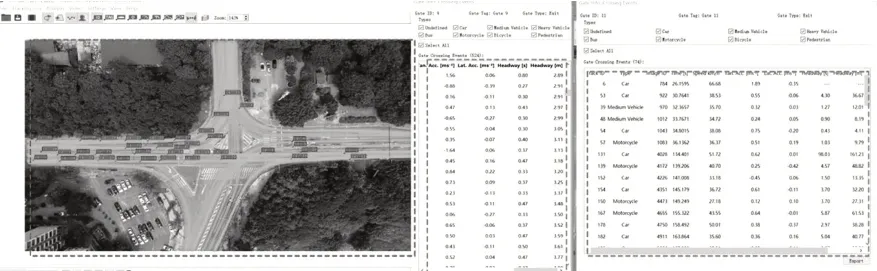
图4 Datagrams Viewer软件界面Fig.4 DataFromsky Viewer software interface
2 交叉口到达车辆运行特征
2.1 车辆时空图特征分析
选取平均坡度较明显、交通量较大的丹回路1号进口道、汇龙路11号进口道、2桥连接道15号进口道和2桥连接道16号进口道258条车辆运行轨迹数据来分析到达车辆时空特征,得到不同路段不同停车排队位次车辆时空图,见图5。

图5 不同路段类型车辆时空图Fig.5 Space time diagram of vehicles in different road sections
由于所有车辆在某个时刻通过交叉口时间会随之增加,导致时空图横坐标数值也会不断增大,为便于分析,将所有车辆时间起点均设置为0,位置起点根据所截取的有效界面设置,并划分不同停车排队位次,见图6。从车辆时空位置曲线中可以得到以下发现。

图6 不同车道车辆排队示意图Fig.6 Schematic diagram of vehicle queuing in different lanes
1)在同一路段类型中,不同排队位次车辆的停车点各有不同,相比靠后排列的车辆,停车排队位次越靠前的车辆,其停车点离停止线越近,停车点分布区间越集中,表现为时空图同一停车排队位次纵向水平线分布范围越小。
2)无论是上坡、缓坡还是下坡路段,车辆停滞时间均随排队位次的增加而减少,但不同路段相同停车位置其停滞时间却有所差异,说明位置越靠前的车辆停滞时间越长,所需等待红灯时间也越长,而不同路段相同停车位置其停滞时间存在差异主要与道路平均坡度和交通流状态有关。
3)在不同路段类型中,车辆在下坡路段的整体停车位置分布范围比上坡路段大,表现为时空图整体停车排队位次纵向水平线分布范围较大,即车辆在下坡路段会比在上坡路段提前采取制动措施,保持与前车安全距离从而增大整体停车位置分布范围,这表明山地城市起伏地形导致的道路纵坡会影响到达车辆停车位置的选择。
2.2 车辆停滞延误特征分析
基于车辆x-t时空图分别获取上坡路段、缓坡路段和下坡路段车辆停滞延误数据,并利用统计分析软件SPSS 26进行分析,得到不同路段类型和不同排队位次车辆停滞延误,见图7。
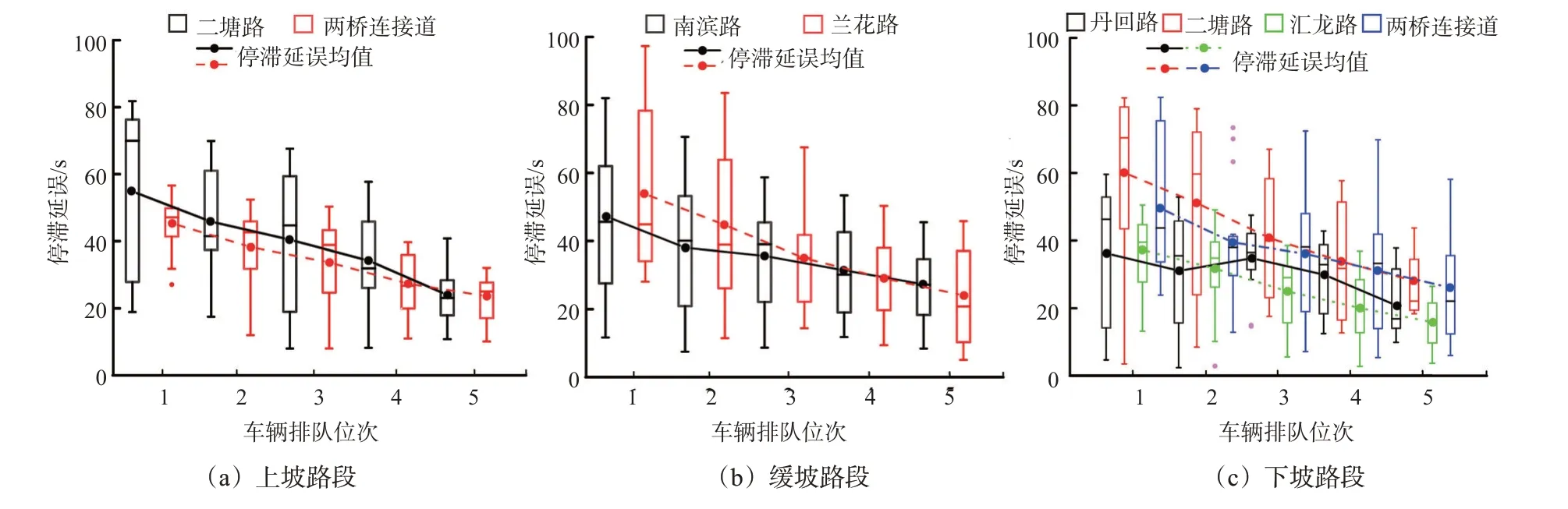
图7 不同路段类型和不同排队位次停滞延误Fig.7 Stagnation and delay of different section types and queuing positions
由图7可见:不同路段类型和不同停车排队位次的停滞延误均有差异,无论是上坡路段、缓坡路段,还是下坡路段,排队位次越靠前的车辆停滞延误分布范围越大,更为分散;而靠后的车辆停滞延误分布范围小,更为集中,其中停滞延误最大值出现在下坡路段,超过相位红灯时间,说明在下坡路段中,有的车辆到达交叉口时刚好绿灯结束,则需要等待1个红灯时长才能通过。通过停滞延误均值折线图可以看出,在同一路段类型中,停滞延误均值随着车辆排队位次的增加而逐渐降低,说明车辆在不存在2次等红灯的情况下,停滞延误与停车排队位次呈负相关。由于在交叉口因红灯而等待的时间是车辆停滞延误的主要影响构成部分之一,说明车辆停滞延误与进入交叉口的时间有关,在非饱和流状态下,车辆排队位次越靠后,停滞延误越短,但在不同路段中存在差异,说明道路平均坡度对停滞延误也存在影响。
2.3 车头时距统计特征分析
车头时距是交通研究中广泛用于评价各种性能指标的重要参数,通过研究其统计分布规律,可为反映道路通行能力、交叉口服务水平提供可靠的依据[20-21]。通过DataFromSky Viewer软件计算得出表2中各进口道绿灯亮起后停止线位置处车辆的车头时距参数,筛选后对其进行统计分析。由表2可见:上坡路段车头间距均值基本高于下坡路段和缓坡路段,最大值出现在上坡路段,表明在上坡路段中,后续车辆启动运行时为保持与前车安全距离而增加车头时距或存在车流量较少而增加车头时距的情况。

表2 直行车辆车头时距累计频率分布和特征分位值Tab.2 Cumulative frequency distribution and characteristic quantile value of headway of straight vehicles
然后绘制不同路段类型的车头时距分布图(见图8),并利用SPSS 26对车头时距分布进行单样本K-S检验,结果见表3。

图8 不同路段车头时距分布图Fig.8 Distribution of headway in different sections
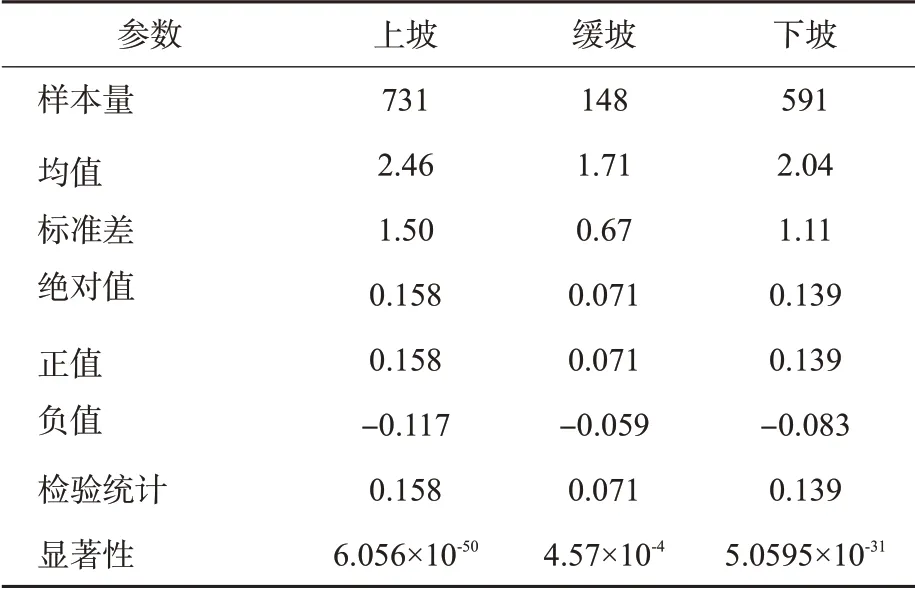
表3 车头时距分布K-S检验结果Tab.3 K-S test results of headway distribution
由图8和表3可见:上坡、缓坡和下坡交叉口停止线位置处的车辆车头时距均不服从正态分布,与平原城市相同,车头时距分布的正态拟合效果并不佳[22]。其中上坡路段离散程度最大,缓坡路段离散程度最小,这是由于车辆受路段类型的影响,车辆在上坡路段中对前车的驾驶行为没有很好的信任度和预判度,所以存在较大的车头时距。结合表2并根据文献[9],无论是上坡、缓坡还是下坡,车辆车头时距主要集中在1~3 s分布范围内,均值基本保持在1.7~3 s范围内,说明车辆在通过交叉口时的前后通过时间相差不大,车辆跟驰状态处于强弱跟驰状态之间。排队位次靠前的车头时距较小,排队位次靠后的车辆车头时距较大,这是由于靠前排队的车辆离停止线较近,并且对反应时间估计充分的原因。
同时,分别对比上坡路段、缓坡路段和下坡路段的车头时距峰值可以看出,整体上下坡路段和缓坡路段的车辆车头时距比上坡路段大,但即使是同为上坡/缓坡/下坡路段,不同进口道的车辆车头时距仍存在差异,说明车头时距并不只受路段类型这一因素,还可能与车辆启动时间、车流整体状态和驾驶员对信号控制的反应特性等有关。
2.4 车头间距统计特征分析
运用同样方法对计算得到的车头间距参数进行统计分析,并采用单样本K-S检验进行定量分析。图9为不同路段车头间距分布图,表4为直行到达车辆车头间距累计频率分布和特征分位值,表5为车头间距分布K-S检验结果表。
由图9和表5可见:不同路段类型交叉口停止线位置处的车辆车头间距分布都呈现相同的趋势,表现为左偏,但均不服从正态分布,这与非山地城市车辆车头间距分布类似。在上坡路段和下坡路段中,车头间距主要集中分布在3~15 m,而缓坡路段在6~12 m以内,说明路段类型即道路坡度对车头间距存在影响。无论是上坡、缓坡还是下坡路段,车头间距最大值均超过30 m,说明交叉口交通量较少,在1个信号周期内排队车辆能够全部通过交叉口,且后续未参与排队到达车辆仍能在绿灯结束前继续通过。

图9 不同路段车头时距分布图Fig.9 Distribution of headway in different sections
同时,结合表4和表5对比上坡路段、缓坡路段和下坡路段车头间距特征值,在整体上车辆通过缓坡路段时的车头间距比上、下坡路段小,说明车辆在缓坡路段通过交叉口时车辆行驶较为规律,随着时间增加,其车头间距以慢增速逐渐变大,形成“分离”状态,这与2.3中缓坡路段整体车头时距较小的结论相符。而上、下坡路段车头间距标准差均大于缓坡路段,说明驾驶员在上坡、下坡路段车距把握更为谨慎,来防止追尾事故的发生。

表4 直行车辆车头间距累计频率分布和特征分位值Tab.4 Cumulative frequency distribution and characteristic quantile value of headway of straight vehicles

表5 车头间距分布K-S检验结果Tab.5 K-S test results of headway distribution
3 交叉口到达车辆参数相关性分析
3.1 车头间距与速度的相关性分析
车辆在运行过程中车速对车间距有显著影响,现有关于交通流参数和基本图的的研究主要是针对城市快速路和高速路,很少涉及信号交叉口。初步拟合发现,停止线位置处车辆速度与前车之间车头间距相关性较为明显。图10为交叉口进口道绿灯亮起时车辆运行示意图。

图10 绿灯亮起时车辆运行图Fig.10 Vehicle running diagram when the green light is on
图11为上坡路段、缓坡路段和下坡路段直行路段车辆停止线位置处的速度v与前车车头间距m的散点图。由图11可见:车辆经过不同路段类型停止线位置处的车头间距m均随速度v增大而增大,呈上升趋势,但与小平原城市不同的是,上坡路段二者为线性关系,但在下坡路段和缓坡路段中,二者为非线性关系,说明车辆以较小速度通过停止线时,其车头间距也较小;而随着车辆速度的逐渐增大,其车头间距也逐渐增大,即车辆的速度与其车头间距具有较强的正相关性。分析其原因,车辆在绿灯亮起通过交叉口时,车速的提高也让驾驶员对前车的距离变得更加敏感,为避免追尾事故发生,驾驶员普遍会选择加大前后车距离,获得更大的自由行驶空间。

图11 上坡、下坡和缓坡车头间距与速度散点图Fig.11 Scatter diagram of headway and speed on uphill,downhill and gentle slopes
3.2 车头间距多元线性回归分析
对于车头间距的感知受到许多因素的影响,在3.1中已经发现相邻2车的车头间距与后车的速度有关。结合山地城市信号交叉口的背景,山地城市起伏地形导致的道路纵坡会影响车辆停车位置的选择,所以需要对平均坡度是否影响车头间距进行分析。利用SPSS 26对其进行分析,表6为速度和平均坡度对车头间距的回归分析结果。

表6 速度和平均坡度对车头间距的回归分析结果Tab.6 Regression analysis results of speed and average slope on headway
由表6可见:回归方程整体显著(F=652.504,p<0.001),回归方程的决定系数为0.473,说明预测变量速度、平均坡度与车头间距具有相关性,但相关性不够强。DW值为1.145,说明存在驾驶员驾驶行为接近的情况。容差大于0.1,VIF小于5,意味着速度与平均坡度不存在严重的多重共线性。所以在绿灯亮起车辆启动至饱和车头间距时间段内进口道速度和平均坡度与车头间距的多元线性回归模型为

式中:H为相邻2车车头间距,m;V为后车经过停止线时的速度,km/h;I为道路纵坡平均坡度,取值(-7.2°~8.5°)。
4 结束语
1)本文通过将山地城市信号交叉口高空视频图像上传至云平台得到车辆运行数据,基于x-t时空图得到车辆停滞延误情况。不同路段类型和不同停车排队位次的停滞延误均有差异,车辆停滞延误长短是进入交叉口的时间点、交叉口信号控制和停车排队位次等共同作用的结果。
2)交叉口不同路段停止线位置处的直行车辆车头时距和车头间距各不相同,均不服从正态分布;车头时距集中在1~3 s,车头间距集中在3~15 m;整体上缓坡路段车头时距和车头间距都比上坡路段、下坡路段小;道路纵坡、车流整体状态等均会影响车辆车头时距、车头间距。
3)交叉口不同路段直行车道车辆停止线位置处速度与前车车头间距具有较强的正相关性,车头间距H随着速度V的增大而逐渐增大;道路平均坡度与车头间距存在正相关性;建立了速度和平均坡度与车头间距的多元线性回归模型。
4)目前针对于城市信号交叉口交通流参数如车头时距、车头间距、延误等的研究主要针对于平原城市,本文对道路条件复杂的山地城市信号交叉口车辆运行特征进行了分析,并发现了道路平均坡度对交叉口车辆运行存在显著性影响,但由于选取到满足交通条件和道路条件、同时允许无人机飞行的交叉口难度较大,导致交叉口个体数较少。下一步将调查更多的山地城市信号交叉口,找出更多影响因素,完善并检验研究成果的可靠性和普适性;对试验数据深度挖掘,对进口道车辆加、减速阶段进行对比分析,进一步推进、完善山地城市交叉口车辆整体运行特征。
