基于安全车速的北京冬奥会山地道路冰雪路面通行能力研究*
2022-09-15郭娅眀李萌李昀轩闫慧敏王笑颜
郭娅眀 李萌 李昀轩 闫慧敏 王笑颜
(清华大学土木水利学院 北京 100084)
0 引言
2022年北京冬奥会交通运行服务面临2地3赛区、冰雪路面、山地道路等诸多挑战,尤其是延庆赛区将举办高山滑雪等雪上项目,各场馆位置海拔较高、功能区分散,通往场馆道路单一且条件苛刻。例如,延庆赛区山地道路的设计方案中包含14处回头曲线,最小圆曲线半径为15 m,最大纵坡达到12%。在冬奥会赛事期间,山区雨雪天气频发冰雪路面会导致路面附着系数降低,上坡时路面不能为车辆提供足够的附着力导致车轮空转甚至出现车辆倒溜现象,下坡时冰雪路面会导致车辆停车距离增加,平纵组合路段(平曲线-纵坡)车辆制动时极易出现追尾、甩尾、侧滑、侧翻等现象[1-2]。因此,当复杂山地道路叠加冰雪路面时,如何保障车辆安全运行将成为延庆赛区复杂山地道路交通管控的最大挑战。
目前,国内外学者针对山地道路冰雪路面安全车速管控方法已经展开了大量研究,主要可以分为全线限速和可变限速2种方式。全线限速是根据山地道路设计速度和天气情况对整条路实施单一的限速方案[3-4]。例如,Ahmed等[5]认为道路的几何线性会影响山区公路的行车安全,其中恶劣天气和陡坡路段车速过高时会大大增加碰撞风险;Umeda等[6]用状态空间模型实时评估车辆车速受到冰雪路面的影响程度,并构建了降雪量和车速之间的预测模型。李松龄等[7]研究了冰雪路面车辆限速问题,分析了冰雪道路对交通安全的影响,提出了不同冰雪状态下的车辆安全行驶速度建议;刘伟[8]结合山区高速公路在不同能见度、附着系数及纵坡条件等数据得到冰雪山区道路最大安全车速和建议限速值。全线方式虽然简单、便捷、易于管理,但全程限速没有考虑不同车辆类型和安全车速之间的关系,如果限速值过高会导致交通事故产生,如果限速值过低会增加路段行驶时间,降低道路通行效率。可变限速已经被证明是1种有效提高山区道路冰雪路面安全水平的方法[9]。Saha等[10]分析了美国I-80公路山区路段设置可变限速前后交通事故的发生情况,结果表明可变限速在减少交通事故方面效果显著,结合天气的实时变化设置不同限速值可以大大提高道路的安全性能;Yang等[11]通过驾驶模拟仪研究了卡车司机在山地道路恶劣天气条件下采用可变限速警告对道路安全的提升作用;Gaweesh等[12]分析了美国怀俄明州冬季山区公路交通事故数据,结果表明:不同山地路段设置不同的道路限速标志有助于提升冰雪道路的安全水平。然而,现有的可变限速模型主要应用于高速公路和城市快速路[13-14],这些道路的设计标准和建设条件明显优于冬奥会山地道路,采用现有的可变限速模型难以应用于冬奥会山地赛区场馆、雪场、奥运村之间的复杂交通组织。长期以来,冰雪道路条件下各比赛场馆之间车辆安全保障都是历届冬奥会交通管理部门的重要研究内容。例如,Boyle[15]研究了2010年温哥华冬奥会发生突发事件后交通系统如何保持系统韧性和应急管理方法;Kim等[16]为保障2018年平昌冬奥会成功举办,研发了基于图像的路况检测系统,用于检测不同天气环境下的路面状态,为车辆驾驶人提供准确的路面信息从而保障车辆的安全运行。此外,不可预见的天气条件会造成冬奥会期间山地赛区许多赛事延误或取消,例如2018年平昌冬奥会旌善高山滑雪中心赛事调整率高达近70%[17]。现有的全程限速和可变限速方法也无法满足恶劣环境下赛事的频繁调整和运动员快速转场的交通需求。
针对上述问题,本文建立了结合路段平、纵线形的精细化三维空间建模方法,重构了北京冬奥会延庆赛区山地道路的道路几何特征,在此基础上分析了路线形设计、路面条件和安全车速之间关系,提出了1种大型活动山地道路冰雪路面车辆安全车速模型,以安全车速为依据得到不同路面条件下延庆赛区山地道路的通行能力。研究结果可以为冬奥会山地赛区道路安全运行管理提供依据,也可以为旅游景区、园区山地道路设计冰雪路面安全车速、预估道路最大交通流量提供理论支撑。
1 复杂山地道路三维空间建模
传统公路线形设计通常采用三维公路中心线投影成二维平面曲线和纵断面进行分离设计,道路设计速度只考虑了平曲线半径或竖曲线半径的影响,不能准确地描述车辆在三维路线上运动的状态[18]。由于二维平面道路在分析道路线形安全风险隐患过程中无法发现道路平纵线形组合中停车视距不足、路线曲率变化不连续等问题。在道路条件较差的山地路段,车辆行驶过程中受到道路平、纵线形组合中曲率和挠率的影响,导致驾驶人行驶在连续下坡和回头曲线路段时,视距和视野受到一定限制难以准确评估道路安全态势,无法选择合适的行驶车速,存在一定的安全隐患[1,19]。因此,针对北京冬奥会复杂山地道路需要构建连续三维空间的道路线形模型,精细化研究各路段平、纵线形详细数据,在保障车辆行驶安全的条件下制定合理的安全车速模型。
本文以北京冬奥会延庆赛区山地道路作为研究对象,道路二维平面图见图1,数据来源于延庆赛区2号路道路设计平面图。图1(a)为路段二维平面图,该路段全程7.19 km,起终点高差约520 m,包含14处回头曲线和74处圆曲线,部分圆曲线半径见图1(b),其中最小圆曲线半径为15 m,道路最大超高为2%,道路平均纵坡7.47%,最大纵坡12%,其中最大坡长600 m,见图1(c)。

图1 冬奥会延庆赛区山地道路二维平面示意图Fig.1 The geometric of mountainous roads in Yanqing competition area of Beijing Winter Olympics
结合道路二维平面图数据构建道路三维模型,初始化道路设计信息,令Mk为道路纵坡数据,包含坡长Sk、坡度值δk,道路中心线平面坐标为(xi,yi),为精细化研究各路段线形详细数据,取平面坐标采样点间隔为1 m,共获得7 181个采样点。建立三维空间坐标系XYZ,道路三维空间坐标为(xi,yi,zi),道路三维空间模型算法见图2。

图2 道路三维空间模型算法流程图Fig.2 The process of 3D spatial model of mountainous roads
道路纵坡数据Mk=(Sk,δk),k=1,2,…,K,K为道路纵坡序号;Sk为纵坡坡长,m;δk为纵坡坡度。道路三维Z轴坐标计算公式为

di计算公式为

式中:xi,yi为道路平面采样点坐标,i=1,2,…,N,N为道路采样点数量。

输出的道路三维空间坐标为(xi,yi,zi)=(xinterp,yinterp,zinterp)。
依次将道路纵坡数据和道路平面采样点坐标数据导入道路三维算法中,计算得到三维空间坐标,并导入Matlab软件中实现山地道路三维可视化图,见图3。

图3 延庆赛区山地道路三维空间可视化图Fig.3 3D spatial diagram of mountainous roads in the Yanqing competition area
由图3可见:本文研究的山地道路曲折蜿蜒,线形组合复杂、曲线比例高、部分圆曲线半径偏小,坡度偏大。相较于传统二维平面图,本文构建的道路三维模型空间坐标中包含了道路的平、纵线形组合信息,这些信息有助于从微观层面分析车辆在山地道路和冰雪路面的行驶特征,同时将三维数据导入仿真软件中也有助于仿真结果更符合真实的交通环境。
2 山地道路冰雪路面安全车速模型
车辆在复杂山地道路平纵组合路段行驶过程中同时受到惯性离心力、重力、侧向力等多种力共同作用。相较于上坡路段,车辆在山地道路连续下坡和回头曲线路段需要频繁制动,制动器中摩擦片温度急剧升高,从而可能出现刹车失灵现象[20]。因此,有必要从微观层面优先构建山地道路车辆下行过程中的运动学模型。
2.1 平纵组合路段车辆运动学模型
当车辆从直线路段经过缓和曲线驶入圆曲线路段时,由于离心力作用,车轮会受到来自地面的侧向反作用力。当路面对车轮的侧向反作用力达到车轮路面的附着极限时,车辆将发生侧向滑动[21]。假设车辆是1个刚性整体,忽略车辆在平曲线行驶时的空气阻力和滚动阻力。为保证车辆行驶稳定性,通常在圆曲线路段不采取制动措施,车辆需到达缓和曲线前完成制动减速。车辆在平曲线路段行驶时,可以认为不受驱动力和制动力影响,只依靠惯性转弯行驶。
建立三维坐标系XYZ。其中X轴为车辆行驶方向,Y轴为车辆沿圆曲线运动受力方向,Z轴为车辆受路面支撑受力方向,O为坐标原点。车辆在纵坡路段下行进入圆曲线转弯时的受力状态见图4,图4(a)为车辆水平横向受力情况示意图,图4(b)为车辆在设超高路段横断面受力情况示意图,图4(c)为车辆纵断面受力情况示意图。车辆水平横向运动学模型为
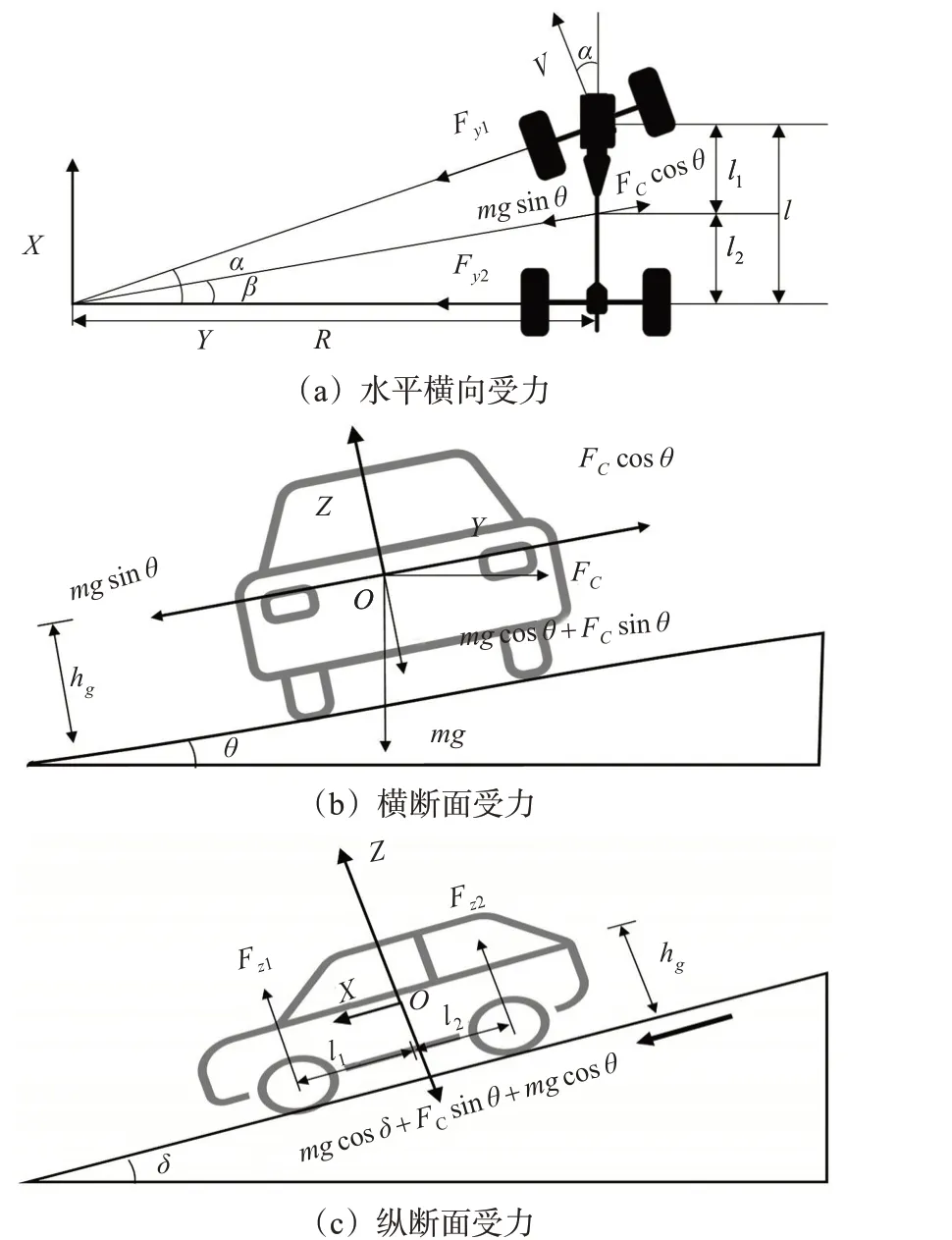
图4 平纵组合路段车辆受力情况示意图Fig.4 Schematic diagram of the vehicle forces on roadway geometric

车辆纵向运动学模型为

式中:Fy1,Fy2为车辆前、后轴所受的侧向力,N;α为车辆前轴与Y轴夹角(°);β为车辆质心与Y轴夹角(°);δ为道路纵坡坡度(°);θ为道路超高横坡的坡度角(°);m为车辆质量,kg;g为重力加速度,取9.8 m/s2;Fc为车辆转弯时所受的离心力,Fc=mv2/R,N;v为车辆速度,m/s;R为转弯半径,m;Fz1,Fz2为车辆前、后轴的法向反力,N;l为汽车轴距,m;l1,l2分别为车辆质心至前后轴的距离,m;Hg为车辆质心高度,m。
2.2 平纵组合路段安全车速模型
平纵组合路段车辆的安全行驶速度与路面附着系数有关[22]。路面附着系数是衡量路面抗滑性能的指标,路面附着系数越大,路面与轮胎之间的侧向力和纵向力也越大,侧向力影响车辆的行驶稳定性,纵向力决定车辆的驱动性能和制动性能。冰雪路面的附着系数明显小于干燥的沥青、混凝土路面,当车辆在附着系数较低的路面采取转向、急加速、急减速等操作时,车轮在冰面上受力不均导致车辆失控,从而引发交通事故[23]。附着系数不仅与路面和轮胎有关,还与汽车的行驶速度及所承受的载荷有直接关系。
车辆在设有超高的平纵组合路段行驶时,为保证其安全性,车辆的侧向反力和法向反力与道路的横向附着系数(μh)需要满足以下2个约束条件,见式(6)。

将式(4)~(5)带入式(6),简化后得到方程组

式(7)为车辆安全行驶速度与圆曲线半径、道路超高、纵坡坡度和路面横向附着系数的关系模型。由于北京冬奥会期间山地赛区最低温度超过-20℃,山地道路长期存在冰膜、雪板等道路状况,冰雪路面导致路面附着系数降低,导致车辆制动过程中出现追尾、侧翻等事故[22]。因此,需要进一步研究山地道路冰雪路面车辆的安全车头时距,从而获得不同路面条件下延庆赛区山地道路通行能力。
2.3 山地道路冰雪路面通行能力
当山地道路面临雪雾共存或强降雪天气时,道路能见度急剧下降会给驾驶人的生理、心理带来负面影响。当恶劣天气条件下车辆在山地道路运行过程中发现前方车辆减速或障碍物时,为避免发生碰撞车辆的减速距离需满足以下条件,见式(8)。

式中:Sdec为车辆为避免碰撞所需的减速距离,m;Sreact为驾驶人制动反应时间内车辆行驶距离,m;Sbrake为车辆制动距离,m;l为车辆长度,m。其中
式中:treact为驾驶人反应时间,s;adec为车辆下坡过程中最大的制动减速度,m/s2,计算公式为

因此,车辆在山地道路冰雪路面安全车头时距为

该山地道路通行能力为

3 模型验证及安全车速建议
3.1 山地道路冰雪路面安全车速
选取北京冬奥会期间山地道路2种常见的冰雪路面状况(冰膜、雪板)和2种常用的车辆类型(轿车、大客车),2种路况和2种车型的相关参数见表1~2。根据现有研究结果[7],路面附着系数(μ)与横向附着系数(μh)一般为μh=0.6~0.7μ,本文取μh=0.6μ。

表1 不同路面附着系数Tab.1 Road adhesion coefficients of different road pavements

表2 北京冬奥会专用车辆车型结构参数Tab.2 Structural parameters of vehicles for Beijing Winter Olympic
将冰雪路面状况和车型结构参数带入平纵组合路段车辆安全车速模型中,获得山地道路冰雪路面的安全车速图,见图5~6。图5(a)和图5(b)分别为轿车在冰膜和雪板路面的安全车速图,轿车在该道路上允许的安全车速为30 km/h,轿车在冰膜路面上的整体安全车速明显低于雪板路面,尤其是在圆曲线半径小于15 m的路段,冰膜路面的车辆安全车速仅为11.93 km/h,而雪板路面的安全车速约23.4 km/h。图6(a)和图6(b)为大客车在冰膜和雪板路面的安全车速图,其中大客车道路允许的安全车速为30 km/h,大客车在冰膜路面圆曲线半径小于15 m的路段的安全车速为11.8 km/h,雪板路面的安全车速约18.3 km/h。

图5 轿车安全车速图Fig.5 The safety speed limit of cars

图6 大客车安全车速图Fig.6 The safety speed limit of buses
值得注意的是,车辆在冰膜路面上的安全车速变化状态更为复杂,由于冰膜路面的横向附着系数小于雪板路面,导致冰膜路面与轮胎之间的侧向力和纵向力变小,降低了车辆行驶稳定性,尤其在连续回头曲线处,轿车和大客车的安全车速分别降低了49%和36%。
3.2 实测数据验证
为验证本文构建的安全车速模型的有效性,试验车辆在山地道路冰雪路面安全运行情况。试验场景为北京冬奥会延庆赛区山地道路,试验时间为2021年3月,试验道路部分路段为冰膜路面,尤其是连续回头曲线背阴处结冰路面较多。试验车为冬奥会赛事指定大客车,通过车载GPS每隔1 s记录车辆的位置坐标和当前车速,试验驾驶人为熟悉本次研究的专用道路线型且长期从事客运营运的大客车司机,驾驶人行驶车速不超过40 km/h,驾驶试验车辆多次往返本次研究的山地道路起点和终点,共获得40条车辆运行轨迹数据,选择受外界干扰较少的2次车辆下坡行程,绘制车辆连续行驶的速度轨迹,见图7。由图7可见:图7(a)中试验车辆以30 km/h的车速开始下行,在进入第1个回头曲线处(桩号7+000)车辆减速明显,车速从30 km/h降低至17.9 km/h,降幅约40%,随后车速保持在17 km/h左右通过连续回头曲线。当车辆下行至桩号3+500处,车速从15.2 km/h降低到3.67 km/h,降幅约75%。当车辆到达桩号3+000处,车辆多次加速将车速提高到33.25 km/h,明显超过安全车速,尤其是在桩号2+706处,车辆以34.08 km/h速度通过转弯半径只有15 m的回头曲线,超过安全车速(11.8 km/h)3倍。同样的状况多次出现在桩号2+500至2+000范围内,这一阶段车辆频繁出现急刹车现象。图7(b)为试验大客车测试车速轨迹2,相比图7(a)车辆开始阶段速度较低,在桩号6+100处车速由22.8 km/h降低至4.54 km/h,降幅约80%,当车辆下行至桩号1+600处,由于道路坡度逐渐变缓,车速逐渐升高至36.92 km/h,尤其在桩号0+875处车速达到40 km/h,超过安全车速30 km/h。总体而言,2条车辆速度轨迹表明车辆下行过程中均出现频繁刹车现象,甚至多次采取急刹车制动,可能导致车辆制动器因高温失效,而且部分圆曲线路段试验车辆车速高于安全车速,可能导致车辆发生侧翻事故,具有潜在的安全风险隐患。

图7 下坡行程安全车速和实测车速对比图Fig.7 Comparison of safe speed and tested speed for the downward slope
3.3 仿真结果分析
依据实地测试结果和本文建立的安全车速模型,采用VISSIM仿真软件模拟多种场景下延庆赛区山地道路车辆的行程时间和通行能力。通过建立的山地道路三维模型空间坐标作为仿真几何建模参数,其他仿真参数包括:驾驶人反应时间为2.5 s,跟车模型采用Wiedemann99模型[24],安全车头时距可以根据式(12)获得。数据检测器包括行程时间监测和车辆采集点,分别设置在道路起点(桩号7+181)下行至终点(桩号0+000)。仿真时长设为10 000 s,记录其中3 600~7 200 s共1 h交通数据。
根据所建立的山地道路冰雪路面车辆安全车速模型和传统的全程限速方法,共设计20种仿真场景,包括全程限速(10,15,20 km/h)、安全车速(冰膜路面、雪板路面)在2种通行条件单向行驶(车辆全部下行)、双向行驶(上行下行车辆比例为1∶1)和实测车辆行驶时间对比,见表3。由表3可见:当全程限速速度较低(10 km/h)时,轿车和大客车行驶时间都超过40 min;当全程限速速度较高时(20 km/h),道路单向行驶的行程时间仅为22 min。实测结果表明:车辆在测试道路冰膜路面的行驶时间大约为26 min,比冰膜路面安全车速行程时间(28.8 min)少2.8 min。

表3 不同场景下路段行程时间结果Tab.3 Travel time results in different scenarios
由图7可见:测试车辆在部分路段的车速明显高于安全车速,虽然实测车辆路段行程时间较少,但车辆存在因减速不及时发生侧翻事故风险。根据GB/T 51046—2014《国家森林公园设计规范》[25],本文研究的山地道路全程限速应该不超过15 km/h,当延庆赛区山地道路处于冰膜路面时,全程限速10 km/h,轿车和大客车的行程时间分别为42.15 min和42.39 min,采用安全车速的轿车和大客车在冰膜路面的行程时间分别为26.16 min和28.83 min,缩短了约38%和32%;当延庆赛区山地道路处于雪板路面时,全程限速15 km/h,轿车和大客车的行程时间分别为28.3 min和28.52 min,采用安全车速的轿车和大客车在雪板路面的行程时间分别为21.01 min和21.42 min,缩短了约26%和24%。
为了进一步研究延庆赛区山地道路在不同路面环境的通行能力,分别模拟了4类场景在不同输入交通量条件下道路通过的车辆数,见图8。由图8可见:随着输入交通量的增多,道路通过交通流量存在1个自由流到饱和流的相变过程,即车辆处于自由流状态时,道路通过车辆数随输入交通量的增加而增加,车辆处于饱和流状态时,单向行驶(车辆全部下行)通过车辆数保持平稳,而双向行驶(上行下行车辆比例1∶1)通过车辆数逐渐降低。原因在于,当山地道路为双向行驶,下行车辆在连续回头曲线处需要让行上行车辆,从而造成车辆延误增加,通过车辆数降低。图8(a)中山地道路在冰膜路面条件下轿车从自由流到饱和流的最大交通量为241辆/h(单向行驶)和231辆/h(双向行驶),大客车最大交通量为227辆/h(单向行驶)和222辆/h(双向行驶);图8(b)中山地道路在雪板路面条件下轿车最大交通量为319辆/h(单向行驶)和249辆/h(双向行驶),大客车最大交通量为301辆/h(单向行驶)和236辆/h(双向行驶)。此外,分别绘制了4类仿真场景下轿车和大客车的行程时间,见图9。由图9可见:当道路输入交通量超过自由流时,单向行驶车辆行程时间略微增加,而双向行驶道路下行车辆的行程时间显著增加。原因在于当车辆上行下行车辆比例1∶1时,在回头曲线处为保证车辆行驶安全,下行车辆需要停车让行上行车辆。随着上行车辆数不断增多,下行车辆需要让行的次数逐渐增多,甚至在部分路段产生排队拥堵现象,从而导致行程时间显著增加。4类仿真场景在2种路面条件的行程时间见表3。

图8 2种路面条件下道路通过车辆仿真结果Fig.8 Simulation results of road traffic flow under ice and snow pavement

图9 2种路面条件下车辆行程时间仿真结果Fig.9 Simulation results of travel time under ice and snow pavement
综上所述,所提出的复杂山地道路冰雪路面安全车速模型可以在保障车辆行驶安全的前提下有效提高车辆的行程时间。针对冬奥会赛事期间延庆赛区山地道路不同的路面条件,应当采取相应的安全车速以保证车辆的行车安全。此外,在制定赛事期间车辆调度方案时,应结合道路的通行能力,合理考虑赛事调整增加的交通需求,防止路段车辆由自由流变为饱和流导致车辆延误的问题。
4 结束语
本文针对2022年北京冬奥会复杂山地道路冰雪路面场景,如何保障车辆的行驶安全展开了相关研究。
建立了1种精细化的复杂山地道路冰雪路面安全车速模型,模型同时考虑道路线形设计、路面条件和安全车速之间关系,以安全车速为依据得到不同路面条件下山地道路的通行能力。选取了北京冬奥会期间山地道路2种常见的冰雪路面状况和2种常用的车辆类型,建立冰雪路面安全车速模型。结合实测车辆数据和VISSIM仿真20种场景验证模型的有效性。和传统的全程限速模型相比,本文建立的安全车速模型在冰膜路面的行程时间缩短了约38%(轿车)和32%(大客车),雪板路面的行程时间缩短了约26%和24%。
根据仿真结果可知,随着输入交通量的增多,山地道路通过交通流量存在1个自由流到饱和流的相变过程。当车辆处于自由流状态时,通过车辆数随输入交通量的增加而增加;当车辆处于饱和流状态时,单向行驶道路通过交通量保持平稳而双向行驶道路通过交通量逐渐降低。冰膜路面条件下,轿车下行最大交通流量为241辆/h(单向行驶)和231辆/h(双向行驶),大客车下行最大交通流量为227辆/h(单向行驶)和222辆/h(双向行驶);雪板路面条件下,轿车下行最大交通量为319辆/h(单向行驶)和249辆/h(双向行驶),大客车下行最大交通量为301辆/h(单向行驶)和236辆/h(双向行驶)。
为了落实安全车速建议方案在北京冬奥会赛事期间实际应用,建议在活动筹备阶段开展不同场景和道路条件下的实地驾驶培训,特别加强驾驶人在风险路段的培训,提升驾驶人对道路的熟悉程度及应急能力。此外,还可以借助车载智能设备实时提醒驾驶人前方安全车速信息,并辅助路侧智能设施和减速装置,确保车辆可以安全、快速的通过复杂山地道路。
本文的研究工作尚存在一定的局限性,车辆运动学模型只考虑了车辆下行1种情况,仿真场景只考虑了2种车型单独仿真结果,后续研究将会补全道路上行安全车速,针对不同车辆混行比例仿真更多场景下车辆的通行时间和最大通过交通量,同时将结合北京冬奥会期间延庆赛区2号路车辆实际运行数据验证安全车速模型有效性。此外,本文的研究方法可以为旅游景区、园区复杂山地道路设计冰雪路面安全车速、预估道路最大交通流量提供支撑,以及国内外冬季山区大型体育赛事提供车辆调度方案和道路安全运行管理提供依据。
