Comparison of Three Data-Driven Networked Predictive Control Methods for a Class of Nonlinear Systems
2022-09-08ZhongHuaPangXueYingZhaoJianSunYuntaoShiandGuoPingLiu
Zhong-Hua Pang,,, Xue-Ying Zhao, Jian Sun,,, Yuntao Shi, and Guo-Ping Liu,,
Dear Editor,
In this letter, in order to deal with random network delays and packet losses in a class of networked nonlinear systems, three datadriven networked predictive control methods are designed. Their closed-loop systems and control increments are derived, respectively.Although the expressions of their control increments are obviously different, they are similar in form and composition, which are helpful to evaluate the effects of control actions. A comparison of the control performance of the three methods is carried out by a simulation example so as to show their advantages and disadvantages.
Networked control systems (NCSs) have found practical applications in many fields such as smart microgrids and urban traffic [1],[2]. However, the utilization of networks inevitably brings communication problems such as network delays and packet losses, which would damage system performance. The past two decades have witnessed several typical control approaches to handle them, see,e.g., [3]–[5]. One of them, networked predictive control (NPC), can effectively compensate for those communication constraints, which fully utilize the packet-based transmission mechanism of networks.
Random network delays and packet losses in the backward and forward channels can be treated as destination-based lumped delays(DBLDs) defined in [6]. Up to date, there are two ways to deal with random DBLDs in NPC methods. One is to compensate for random round-trip time delays (RTTDs) [7], and the other is to separately handle one-way time delays (OWTDs) in the two channels [8]. For an NCS with an accurate model, the two ways can provide the same dynamic performance as that of the control system with no delays,although they have different closed-loop stability conditions.
In practice, however, it is not easy to create a precise model for a complex system, due to intrinsic properties such as nonlinearity,time-variance, and so on. In this case, a data-driven NPC approach is necessary. In [9] and [10], a data-driven NPC method was proposed to compensate for random RTTDs. According to delay compensation ways, another two data-driven NPC methods can also be designed.Thus, two questions arise: what are the differences between the three data-driven NPC methods, and which one is superior? The answers will be given by theoretical analysis and numerical simulation in the following, which are also the main contributions of this letter.

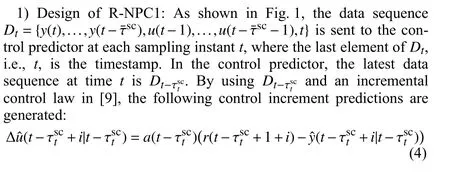
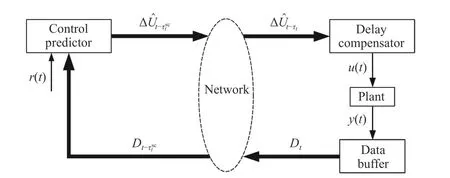
Fig. 1. R-NPC scheme.
Fig. 2. O-NPC scheme.

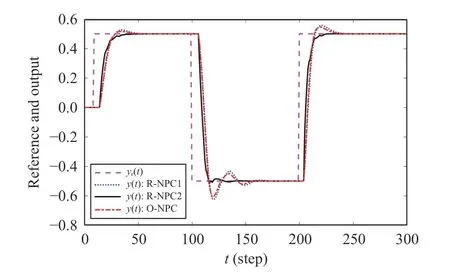
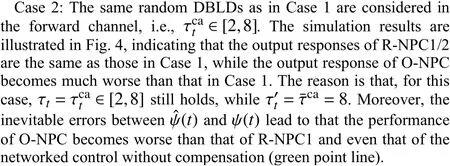
Fig. 3. Simulation results for backward channel DBLDs τ st c∈[2,8].
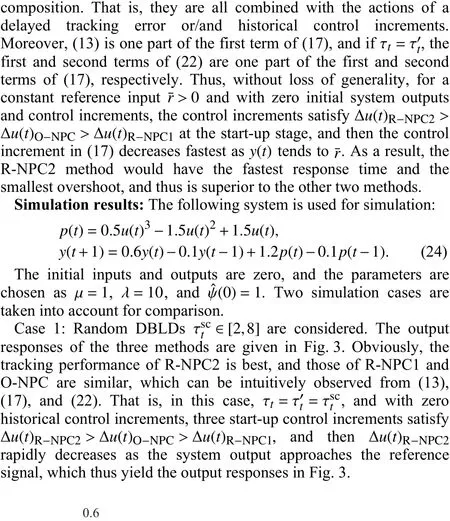
Conclusion: In this letter, three data-driven NPC methods have been presented for a class of nonlinear NCSs. In order to compare them, the control scheme design, closed-loop system analysis, and numerical simulation have been conducted. The main similarities and differences between them have been discussed. Simulation results have shown that among them, the R-NPC2 method can provide the best performance.
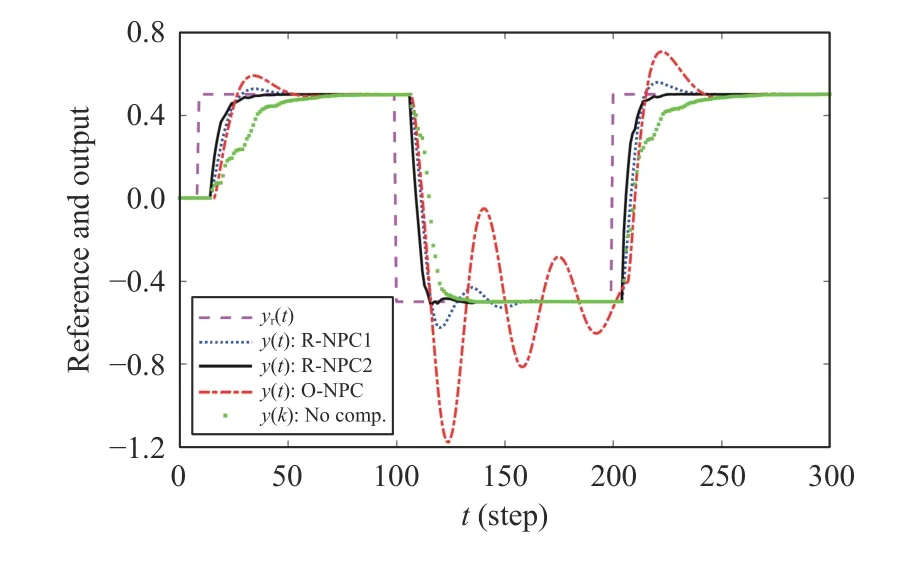
Fig. 4. Simulation results for forward channel DBLDs τ ct a∈[2,8].
Acknowledgments: This work was supported in part by the National Natural Science Foundation of China (62173002, 61925303,62088101, U20B2073, 61720106011, 62173255), the National Key R&D Program of China (2018YFC0809700), and the Beijing Natural Science Foundation (4222045).
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Autonomous Maneuver Decisions via Transfer Learning Pigeon-Inspired Optimization for UCAVs in Dogfight Engagements
- Interval Type-2 Fuzzy Hierarchical Adaptive Cruise Following-Control for Intelligent Vehicles
- Efficient Exploration for Multi-Agent Reinforcement Learning via Transferable Successor Features
- Reinforcement Learning Behavioral Control for Nonlinear Autonomous System
- An Extended Convex Combination Approach for Quadratic L 2 Performance Analysis of Switched Uncertain Linear Systems
- Adaptive Attitude Control for a Coaxial Tilt-Rotor UAV via Immersion and Invariance Methodology