An Extended Convex Combination Approach for Quadratic L 2 Performance Analysis of Switched Uncertain Linear Systems
2022-09-08YufangChangGuishengZhaiLianglinXiongandBoFu
Yufang Chang, Guisheng Zhai,,,Lianglin Xiong, and Bo Fu
Dear Editor,
There have been a few references studying quadratic stability/stabilization of switched certain linear systems. Reference [1], [2] show that if there exists a stable convex combination of subsystem matrices, then a state-dependent switching law can be proposed with a quadratic Lyapunov function to stabilize the switched system. Reference [3] investigates quadratic stability/stabilization of a class of switched nonlinear systems by using a nonlinear programming(Karush-Kuhn-Tucker condition) approach. Reference [4] extends the discussion and results in [1], [2] to achieve quadratic stability for switched linear systems with norm-bounded uncertainties, and a state-dependent switching law has been proposed for quadratic stabilization. Recently, [5] extends the discussion and results in [1], [2],[4] to output dependent switching law design for quadratic stabilization of switched linear systems with norm-bounded uncertainties. In both [4] and [5], a matrix inequality approach is used for the convex combination of subsystems to design the Lyapunov matrix in the switching law. Note that the motivation of dealing with switched uncertain systems is both theoretical and practical, when a single uncertain subsystem can not achieve certain desired performance.
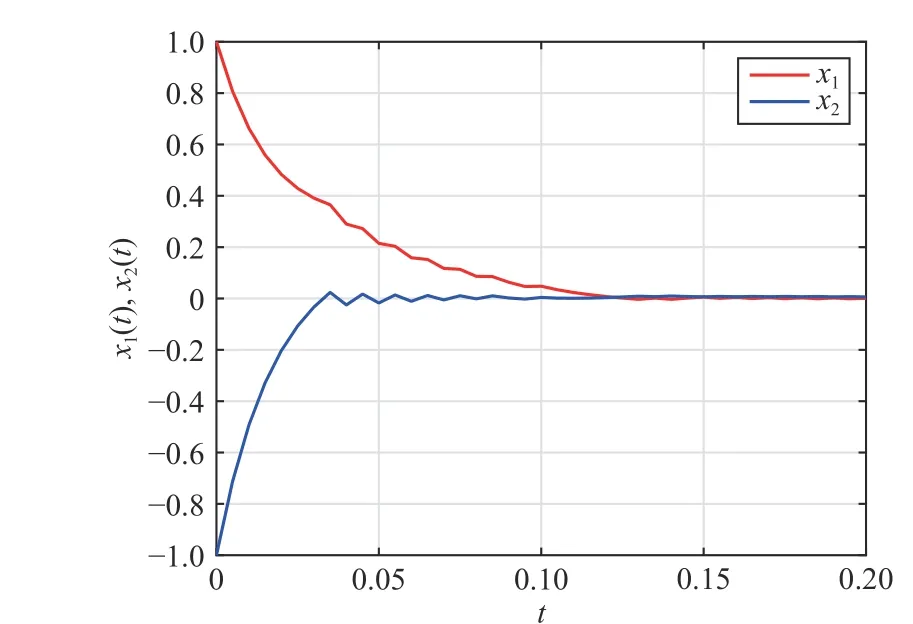
Fig. 1. State trajectories in the numerical simulation.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Autonomous Maneuver Decisions via Transfer Learning Pigeon-Inspired Optimization for UCAVs in Dogfight Engagements
- Interval Type-2 Fuzzy Hierarchical Adaptive Cruise Following-Control for Intelligent Vehicles
- Efficient Exploration for Multi-Agent Reinforcement Learning via Transferable Successor Features
- Reinforcement Learning Behavioral Control for Nonlinear Autonomous System
- Adaptive Attitude Control for a Coaxial Tilt-Rotor UAV via Immersion and Invariance Methodology
- Comparison of Three Data-Driven Networked Predictive Control Methods for a Class of Nonlinear Systems