Development and Control of Underwater Gliding Robots: A Review
2022-09-08JianWangZhengxingWuHuijieDongMinTanandJunzhiYu
Jian Wang, Zhengxing Wu, Huijie Dong, Min Tan, and Junzhi Yu,,
Abstract—As one of the most effective vehicles for ocean development and exploration, underwater gliding robots (UGRs)have the unique characteristics of low energy consumption and strong endurance. Moreover, by borrowing the motion principles of current underwater robots, a variety of novel UGRs have emerged with improving their maneuverability, concealment, and environmental friendliness, which significantly broadens the ocean applications. In this paper, we provide a comprehensive review of underwater gliding robots, including prototype design and their key technologies. From the perspective of motion characteristics, we categorize the underwater gliding robots in terms of traditional underwater gliders (UGs), hybrid-driven UGs, bio-inspired UGs, thermal UGs, and others. Correspondingly, their buoyancy driven system, dynamic and energy model,and motion control are concluded with detailed analysis. Finally,we have discussed the current critical issues and future development. This review offers valuable insight into the development of next-generation underwater robots well-suited for various oceanic applications, and aims to gain more attention of researchers and engineers to this growing field.
I. INTRODUCTION
THE ocean occupies 71% of the earth surface area, and contains abundant biological resources, mineral resources,and vast space resources. Therefore, with the vigorous development of economy and technology, the ocean exploration has received widespread attention from all over the world.Nowadays, unmanned underwater vehicles (UUVs) are mainly used to conduct the ocean exploration, including autonomous underwater vehicles (AUVs) and remote operated vehicles (ROVs) [1]. As an AUV with long endurance characteristics, the underwater glider (UG) is one of the most effective underwater unmanned platforms for ocean observation in recent years. Compared with other underwater vehicles, UG can achieve the gliding motion by changing net buoyancy. It has the advantages of low energy consumption, wide range of navigation, long endurance, and low noise.
In 1989, Stommel, an American oceanographer, proposed the concept of an underwater glider [2]. On the basis of this concept, many scientific research institutions around the world have successively carried out the development of underwater gliders [3]–[7]. Traditional underwater gliders have the unique characteristics of low energy consumption and strong endurance. However, their maneuverability is obviously poor owing to insufficient drive force, which is an important factor hindering the ocean exploration.
In response to the above problems, more and more new types of underwater gliders have been developed in recent years. In terms of energy use, in order to further improve the endurance, the thermal underwater glider (TUG) has received wide attention [8]. Different from the traditional buoyancy system, its main principle is to utilize the temperature difference at different depths of the ocean, resulting in the volume change of the phase change material [9]. With regard to drive form, the hybrid-driven underwater glider (HUG) has both the strong endurance and high-speed characteristics by combining the propeller of AUV and buoyancy system of UG[10]. However, although hybrid-driven underwater gliders have obvious thrust effects, they have low efficiency and poor concealment, and the produced wakes will cause greater damage to the aquatic environment. Therefore, in recent years,in response to the call for marine environmental protection,bio-inspired underwater gliders (BUGs) have attracted the interest of scientific researchers [11]. Through imitating the appearance and swimming mechanism of natural creatures,the bionic driving mechanisms are designed to replace the propeller driver. The BUG not only has the characteristics of high speed, high maneuverability, and strong endurance, but also owns the unique advantages of high efficiency swimming, low noise, and strong concealment, which is of great significance to practical applications. Furthermore, for body shape, some heterosexual underwater gliders have begun to appear, such as disc-type [12], flying wing-type underwater gliders, and the above bionic shapes. They are designed to reduce fluid resistance, and increase lift-to-drag ratio through shape design, thereby improving the efficiency of gliding.
Since 1989, many scientists have carried out a lot of research in the field of underwater gliding robots. With the development of economy and technology, a large number of new underwater gliding robots have emerged in recent years,and they have made certain innovations and improvements in terms of appearance, driving mechanism, and energy power systems. Although there were several literatures investigating underwater gliders [13]–[17], most of them compared the performance of traditional underwater gliders. On one hand,there were few overviews for new types of underwater gliding robots. On the other hand, most recent studies were published four years ago. References [13] and [14] introduced the UG developments by comparing the representative UG, i.e.,Slocum, Spray, Seaglider, with each other, and discussed the role of gliders in ocean research infrastructure. From the point of working depth and payload capacity, various UG platforms were concluded in [15]. Besides, control strategies of UG with emphasis on their actuation system were discussed in [16]. In addition, a comprehensive review of UG was presented in[17], the emphases of which lay on the research progress of the single UG platforms and corresponding core techniques.Although some progress has been made in the UG field, there was limited review in the aspects of summarizing the variety of underwater gliding robots (UGRs).
From a novel perspective, this paper focuses on UGRs,including traditional underwater gliders, hybrid-driven underwater gliders, thermal underwater gliders, bio-inspired underwater gliders, and others. The overview framework is shown in Fig. 1. This paper aims to provide researchers with a comprehensive overview of underwater glider research, and will point out the future development prospects of UGRs. To the best of our knowledge, few studies focused on the classification of UGRs, especially on bio-inspired underwater gliders, which are crucial for practical applications of newtype underwater gliding robots. The main contributions of this paper are summarized as follows:
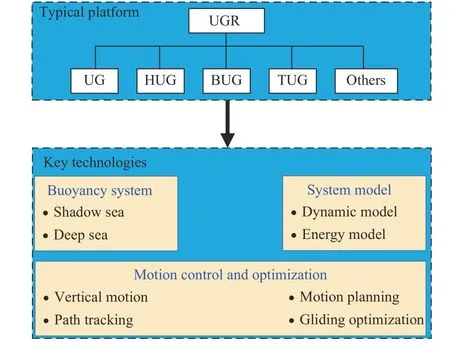
Fig. 1. The overview framework of underwater gliding robots.
1) This paper comprehensively summarizes the current platform research status of UGRs, including traditional UGs,hybrid-driven UGs, bio-inspired UGs, thermal UGs, and other types of underwater gliders.
2) As key technologies of UGRs, we outline the research status of buoyancy driven system and control methods of UGRs, including system modeling, motion control, and gliding optimization.
3) We analyze the current research bottlenecks and future development of UGRs, providing certain guidance and deployment suggestions for researchers in future research.
The remainder of this paper is organized as follows. Section II provides the current progress in system design of underwater gliding robots. The key technologies, including the buoyancy driven system, modeling, and motion control are concluded in Section III. Section IV discusses critical issues and development prospects of underwater gliding robots. Finally, Section V summarizes this work.
II. PROTOTYPE OF THE UNDERWATER GLIDING ROBOTS
According to the above-described framework, UGRs can be divided into traditional underwater gliders, hybrid-driven underwater gliders, bio-inspired underwater gliders, thermal underwater gliders, and others. This section will introduce them, and summarize their electromechanical systems and motion performance with typical comparisons.
A. Traditional Underwater Gliding Robots
Based on the concept of underwater gliders proposed by Stommel, various scientific research institutions have begun to develop underwater gliders. The schematic diagram of a typical underwater glider is shown in Fig. 2, and the electrical and performance comparison are listed in Table I.
In 1992, the Scripps Institution of Oceanography in the United States developed an autonomous lagrangian circulation explorer (ALACE) [3] as a profile buoy. Through satellite positioning, ALACE can complete long-term fixed-point observation and communication. This underwater glider has developed a relatively detailed buoyancy driven system,which has laid an important foundation for the subsequent development of underwater gliders.
In 1993, Tokai University designed an underwater glider named ALBAC [4]. Via horizontal and longitudinal movements of a slider inside, the pitch and roll motions can be achieved. It should be noted that the glider started the surfacing motion by throwing a heavy mass, which was about 3 L, so the glider can only finish a single round of gliding motion after one launch. Moreover, ALBAC completed the test verification in Ashinoko Lake and the Suruga bay.
Since 2001, the University of Washington has developed a series of underwater gliders named Seaglider [5]. This type of glider adopted streamline shape with low-resistance. By improving the buoyancy driven system, it had stable longterm operation ability with various sensors, such as conductivity, temperature, depth (CTD), global positioning system(GPS), acoustic doppler current profiler (ADCP), and inertial measurement unit (IMU). In addition, by carrying a hydrophone, its improved version SeagliderTMrealized nearreal-time acoustic monitoring of beaked whales and other cetaceans [6]. In 2007, by using a composite pressure hull of thermoset resin and carbon fiber, a deep sea glider Deepglider was developed [18], which can dive to a depth of 6000 m.
In 2001, the Scripps Institution of Oceanography developed a UG named Spray [7]. Its buoyancy driven system was with a maximum buoyancy change of 900 ml at the rear of the body.The Spray successfully observed internal waves in the Monterey underwater canyon using onboard sensors and tides,and observed many profiles [19].
Since 2001, Teledyne Webb Research (TWR) of the United States has begun to develop the Slocum series of underwater gliders [9], [13], [14], [20], [21], mainly including the Slocum battery and Slocum thermal. The former mainly relied on electricity to drive the buoyancy system, and the latter used the temperature difference to change the buoyancy.
The scientists from France designed an underwater glider,Sea-Explorer [22], [23], which adopted a wingless design concept. By carrying loads such as ADCP, a profile observation was achieved in the northwestern Mediterranean Sea,and the effectiveness of data collected by the glider was verified through comparing it with the ship [24].
In 2001, Princeton University developed a small laboratorylevel glider [25]. It adopted a flat shape design with a large wingspan. It was about 18 cm long, and buoyantly driven by suction and drainage. Based on this prototype, more detailed gliding motion modeling and glide angle control were carried out.
The Kyushu University in Japan designed an underwater glider [26] similar to the shape of an aircraft. A suction and drainage and movable slider mechanism were applied to realize the adjustment of buoyancy and the center of gravity.However, the buoyancy driven system had the problem of water leakage. Therefore, it could only glide to a depth of 3 m.In 2008, an underwater glider ALEX [27] was presented by Osaka Prefecture University.
Since the beginning of the 20-th century, the Shenyang Institute of Automation, Chinese Academy of Sciences (SIA)has carried out a lot of research on underwater gliders.Initially, for shallow water gliders [28], the suction and drainage mechanism was adopted to adjust the net buoyancy.Then, from 2013, they were devoted to deep sea gliders, and have conducted a lot of technical research. The typical representatives were Sea-wing 1000 [29] and Sea-wing 7000[30], of which Sea-wing 7000 used the innovative composite carbon fiber material, which was optimized in terms of machinery, hardware, and software from the energy perspective.In February 2017, the Sea-wing 7000 successfully completed the task of diving to 6329 m in the Mariana Trench, setting a world record.
B. Hybrid-Driven Underwater Gliding Robots
With the aid of the propeller of AUVs, the HUG can achieve the both high speed and strong endurance. The typical HUGs are shown in Fig. 3, and their details are listed in Table II.
In recent years, Slocum has mainly launched a series of hybrid-driven underwater gliders [13], [14], [31], [32]. With the aid of GPS, pressure sensor, altimeter, and other sensors, it can complete various underwater tasks. Besides, by using radio frequency (RF) signal, Iridium, ARGOS, acoustic modem,and so on, it owned the communication ability.
Fig. 2. The overview of the traditional UGs. (a) ALACE [3]; (b) ALBAC [4]; (c) Deepglider [18]; (d) Spray [14]; (e) Seaglider [5]; (f) Slocum [20]; (g) Sea-Explorer [23]; (h) ROGUE [25]; (i) UG of Kyushu University [26]; (j) ALEX [27]; (k) Sea-wing1000 [29]; (l) Sea-wing7000 [30].
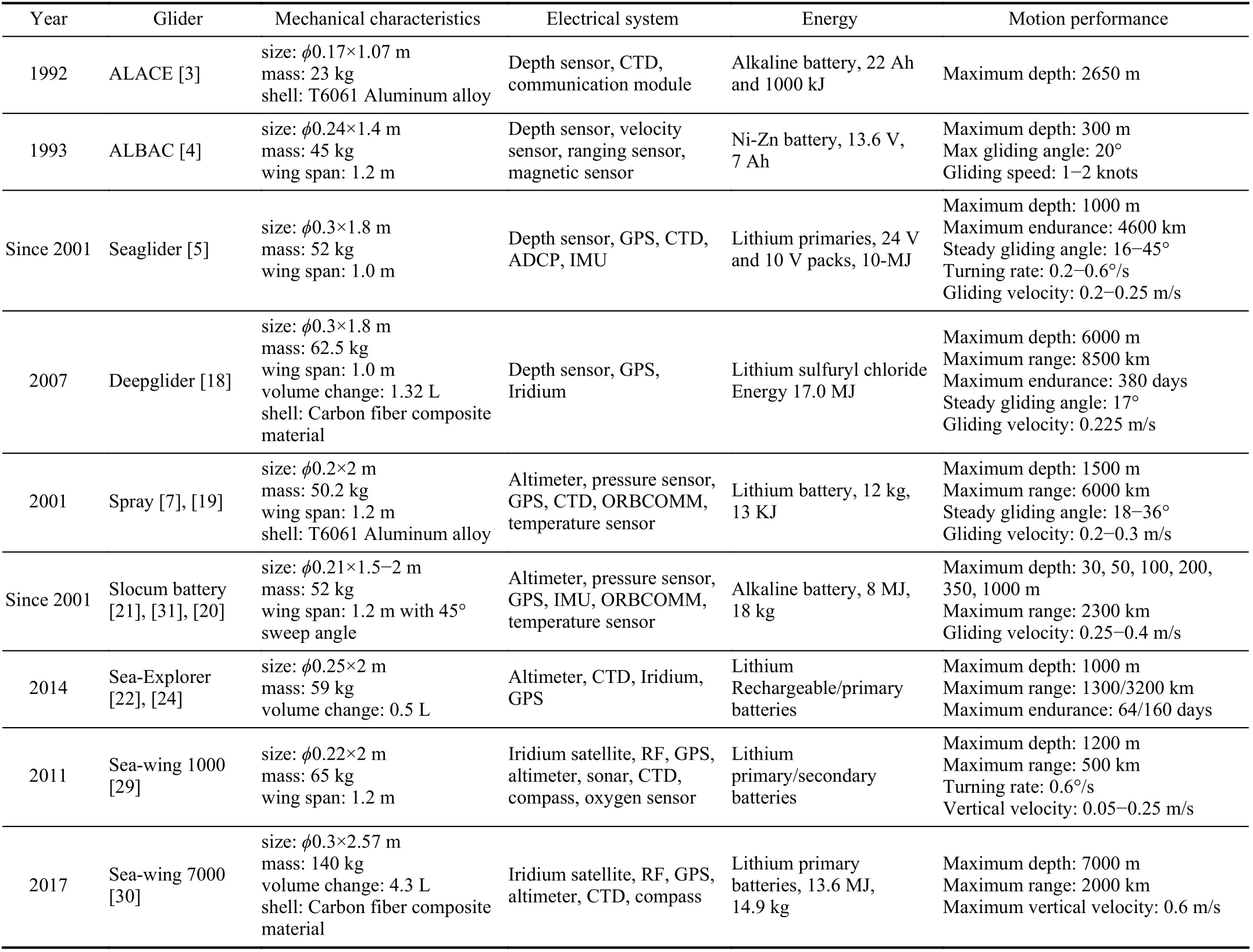
TABLE I TRADITIONAL UNDERWATER GLIDERS
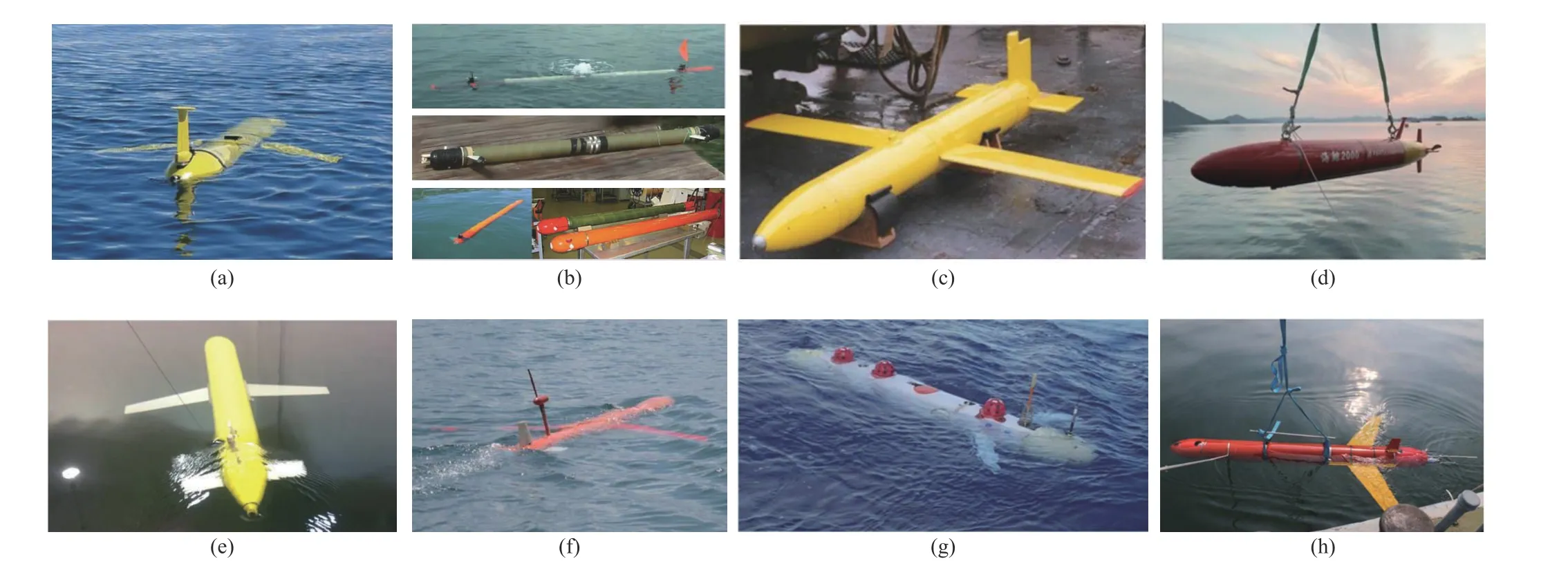
Fig. 3. The overview of the HUGs. (a) Slocum G3 [32]; (b) FOLAGA [33]; (c) Sterne [35]; (d) Sea-whale 2000 [36]; (e) Sea-wing-H [38]; (f) Petrel [42];(g) Petrel-X [43]; (h) Smartfloat [44].
Between 2004 and 2006, Italy and Spain developed three types of underwater vehicles, named Fòlaga [33], of which the first and second generations both applied a propulsion jet pump. In detail, two jets were equipped at the head and tail cabin to control the steering, and the middle jet thruster was applied for vertical movement. Further, the third generation was a hybrid-driven underwater glider, which was equipped with a device powered by a propeller and a jet pump.
In 2001, The French ENSTA (Ecole Nationale Superieure D’Ingenieurs) Bretagne designed a hybrid-driven underwater glider Sterne [34], which was equipped with a mobile battery pack inside to adjust the pitch attitude. Based on the prototype, a robust autonomous navigation method was studied [35].
Further, The SIA has developed two hybrid-driven underwater gliders, Sea-Whale 2000 [36], [37] and Sea-wing-H [38], [39]. Concretely, Sea-Whale 2000 was designed for meeting long-term deep-sea mobile survey needs in the South China Sea. It adopted a main wingless design. With regard to Sea-wing-H, it adopted a folding propeller design [39], [40].
In 2007, Tianjin University designed the first-generation hybrid driven underwater glider Petrel [41], [42], and developed the second-generation Petrel-II in 2013 [10]. Based on this prototype, the stability of the hybrid driven system was proven, and a sea trial in the South China Sea was successfully conducted. In addition, in April 2018, the developed Petrel-10000 dived to 8213 m for the first time, breaking the deep-sea world record held by Sea-wing [17]. Further, in 2019, based on the dual buoyancy adjustment systems, Tianjin University developed a deep-sea glider, Petrel-X, and dynamic modeling and motion analysis were also investigated and analyzed [43].
By combining the motion characteristics of ARGO profile buoy and underwater glider, a multi-modal HUG was developed by Shanghai Jiaotong University, and a multimodal drift mode and gliding mode were realized by changing the internal movable mass [44], [45]. In addition, the research institution further developed a hybrid-driven underwater glider NEZHA [46] by borrowing from the characteristics of fixed-wing unmanned aerial vehicles (UAVs), rotary-wing UAVs, and underwater gliders. Based on this, a water-air integration glider NEZHA III was designed. This glider adopted folding rotors. Moreover, the effectiveness of designed platform was successfully validated via the lake test of multiple motions [47].
In 2021, Shanghai Jiaotong University developed a newest hybrid driven underwater glider that integrates profile buoys,underwater gliders, and propeller-driven gliders. The glider can realize Argo mode, zigzag gliding mode, and propellerdriven mode, which can be applied for multiple water-column sampling [48].
C. Bio-Inspired Underwater Gliding Robots
Bio-inspired aquatic robots have attracted more interests of scientists in recent years, and played more important roles in applications of underwater exploration, observation, and operation [49]–[51]. Although the robotic fish has excellent motion performance [52], [53], it is difficult to achieve longrange motion limited by battery capacity, and has become an important factor hindering their application in ocean exploration. On the contrary, the UG has strong endurance characteristics, but its maneuverability is poor. Therefore, many researchers began to introduce the driving mechanism of underwater gliders into bio-inspired underwater robots, i.e.,bio-inspired underwater gliders. The state-of-art prototypes are shown in Table III.
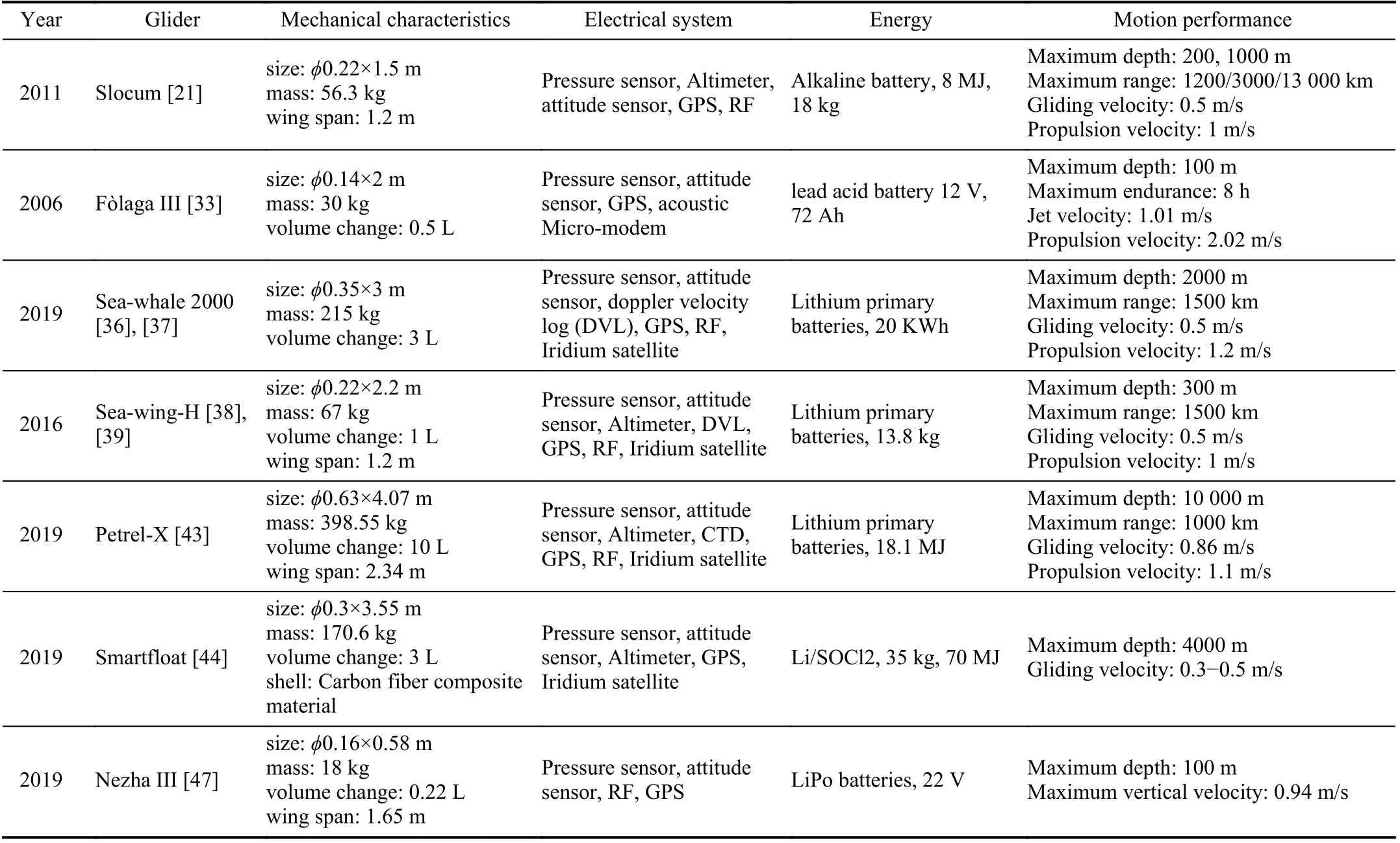
TABLE II THE HYBRID-DRIVEN UNDERWATER GLIDERS
In 2011, the Michigan State University (MSU) proposed a gliding robotic fish [11], which introduced the buoyancy driven mechanism of the underwater glider into the bioinspired robotic fish, possessing both long endurance and high maneuverability to complete water quality monitoring and other underwater operations. Since 2011, the institution has successively developed three generations of gliding robotic fish. Among them, the first generation [11], [54] designed a pair of fixed wings with large wingspan on the fish-shaped body to generate lift for the gliding motion. The gliding robotic fish was equipped with a pump and a water storage cavity to adjust the net buoyancy, and the pitch attitude could be adjusted by moving the battery. However, it had no movable surface to achieve the swimming mode, and could only perform zigzag gliding motion. The second-generation Grace [55] and the third-generation Grace 2.0 [56] utilized a rotatable tail fin to achieve helical motion and swimming modes, which could provide the lift required for gliding through a large-sized horizontal fixed surface. Since the tail had only one degree of freedom, the swimming performance was weak. Further, harmful algae sampling experiments were conducted in Lake Wintergreen and Lake Higgins in Michigan by combining the spiral gliding motion with body and/or caudal fin (BCF) swimming of the gliding robotic fish Grace [57].
Since 2014, the Institute of Automation, Chinese Academy of Sciences (CASIA) focused on the research of BUGs. In recent years, we have devoted significant effort to the system design and motion control of UGRs. We have successively designed four gliding robotic dolphins and a gliding robotic shark [58]–[63], the former of which included a micro-sized robot, two meter-level robots, and a 1.5 m-sized robot.Furthermore, many corresponding researches on multimodal motion control were carried out, including yaw control, pitch control, depth control, path following, and path planning,providing new ideas for new underwater gliding robots.
1) A Miniature BUG [58]:Generally, a rigid wellstreamlined body modelled after a killer whale was adopted for a better space utilization rate and lift-drag ratio. The translucent body was made of acrylonitrile butadiene styrene copolymers, and could house control circuits, battery packs,gyroscope sensor, communicating modules, buoyancy-driven system, etc. The flippers and flattened fluke, made of polypropylene, can manually be regulated to an expected turn angle via a screw arbor structure.
2) Two 1-Metre-Scale BUGs [60],[63]:For simplified mechanical design and easy installation, the gliding robotic dolphin adopted a distinctive modularity concept. The gliding robotic dolphin consisted of six main cabinets according to their own function: head cabinet, flipper cabinet, mission cabinet, control cabinet, waist cabinet, and caudal cabinet.
3) A 300 m Depth BUG [61]:Aiming for deep-sea applications, a gliding robotic dolphin with higher performance requirements was developed. First, the shape and relative size of the flippers, flukes, and dorsal fins were similar to those of killer whales. Second, in order to enable the gliding robotic dolphin to swim quickly through propulsive system,two joints, namely the waist and tail joints, were set in the back half of the body. Third, the static and dynamic seal were achieved by fluorine rubber O-rings and rotating pan plug,respectively.
In terms of the manta-like underwater glider, there were many researches. In 2016, the Kyushu University also conducted some preliminary research on a bionic manta ray glider, and carried out bionic shape research through computational fluid dynamics (CFD) simulation [64]. Nanyang Technological Institute of Singapore has carried out many studies on manta-like underwater gliders. Through the development of three generations of prototypes, Roman I-III,the high-maneuverability flapping motion of manta rays and the low-energy consumption of gliders have been successfully realized. Among them, RoMan II could glide for 90 hours and flap for 6 hours [65]. RoMan III [66] reduced size and made it more compact while maintaining the speed, and realized multi-modal steering motion with a minimum steering radius of only 0.01 m.
Zhejiang University has developed an underwater glider with bionic pectoral fins, aiming to explore the effect of pectoral fin aspect ratio on propulsion efficiency. The results showed that propulsion efficiency first increased, and decreased with the increase of aspect ratio. The optimal value was 0.6 to guide the design of the optimal pectoral fin shape [67].
In 2016, the SIA conducted many researches on the manta ray-like underwater glider [68], [69], mainly using the high lift-drag ratio shape of the manta ray shape to conducted efficiency optimization work. Besides, the SIA introduced the gliding motion of the underwater glider into the underwater snake robot [70]–[72]. Based on the joint design of the bionic robotic snake, telescopic joints were installed at the head and tail to adjust the net buoyancy. A new type of underwater gliding snake-like robot, Perambulator III, was designed.
In 2020, Peking University developed a bionic gliding robotic swordfish, named FishBot, which completed the gliding motion and bionic motion by integrating the suction and drainage buoyancy adjustment mechanism of the underwater glider and the multi-link robotic fish. During the gliding motion, the diving and rising glide angle were about 7° and 25°, respectively [73].
D. Thermal Underwater Gliding Robots
In 1990, Douglas Webb and Henry Stommel proposed a new scheme for the buoyancy driving energy of the underwater glider, whose principle was to use the temperature difference between warm water on the ocean surface and deep cold water. The theoretical voyage and working time can reach 4×104km and 4 years, respectively [74].
One of the key technologies of the thermal underwater glider is to have a hydraulic drive system that can convert the temperature difference energy into mechanical energy [75].The working principle of the system is shown in Fig. 4(a).There are two kinds of media in the glider, i.e., working fluid and transfer fluid. Concretely, the working fluid is sensitive to temperature changes, and a solid-liquid two-state phase transition can occur at room temperature. When the temperature changes from high to low states, the workingfluid undergoes a phase change from liquid to solid, leading to a shrink in volume [9]. Similarly, when changing from low temperature to high temperature, the volume of the working fluid expands. The heat engine system uses the temperature change to expand through the working volume. The volume change caused by the two-phase conversion influences the system buoyancy.
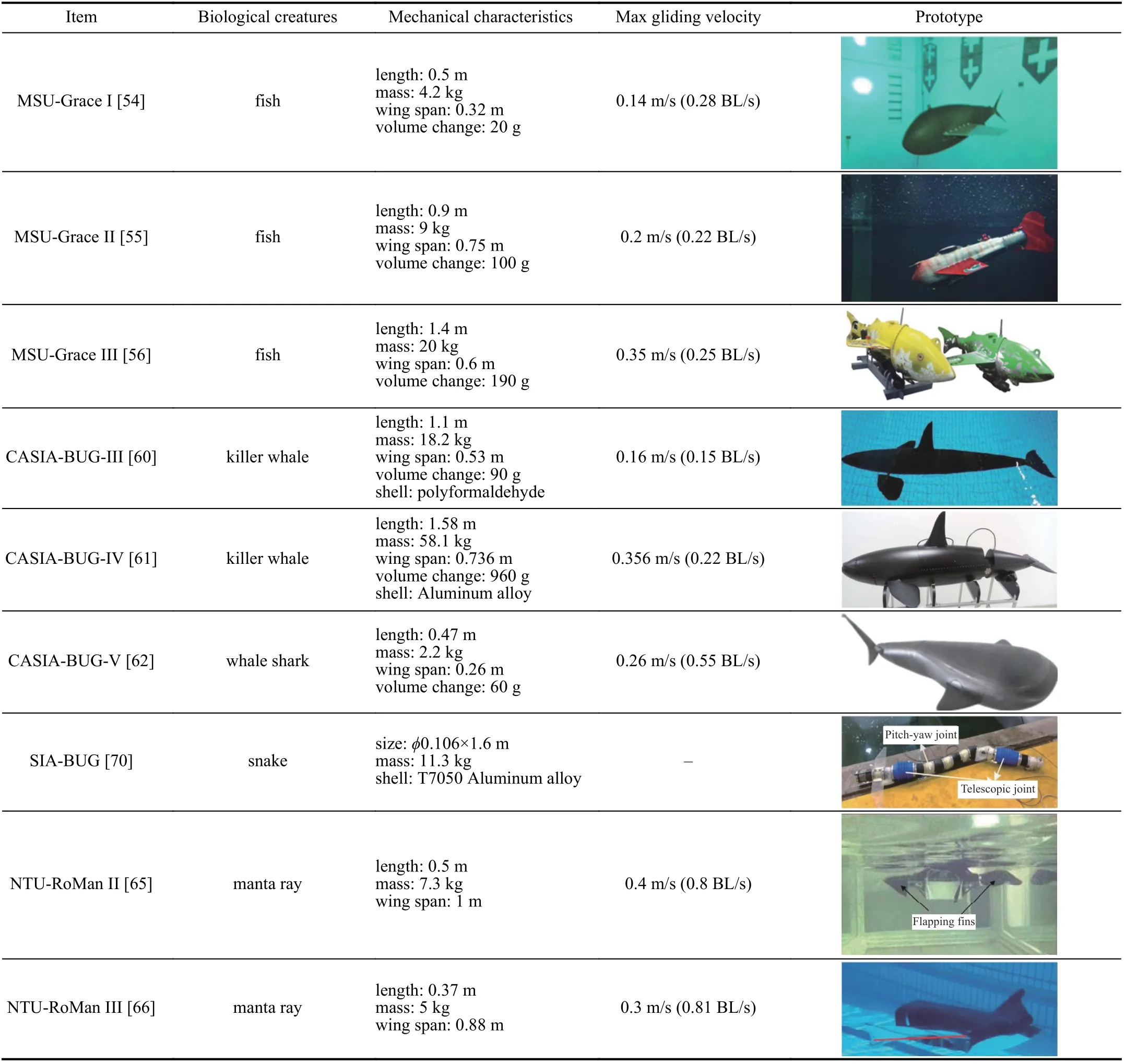
TABLE III THE BIO-INSPIRED UNDERWATER GLIDERS
Since 1998, The TWR of the United States has successively developed four generations of thermal underwater gliders,aiming to achieve the key technology of ultra-high range, as shown in Fig. 4(b). However, due to insufficient stability, the developed platform has a high loss rate [9], [74].
Since 2003, Tianjin University has designed a variety of underwater gliders driven by thermal energy [8], [76]. The first generation adopted a double-layer structure, which integrated the heat engine with the overall structure of the system to improve the hydrodynamic and motion performances of the underwater gliders. The second-generation Petrel-II thermal was smaller in size, and combined the principle of thermal energy and electrical energy, which avoided the problem of system instability when thermal energy fails [77].
E. Other Underwater Gliding Robots
There are also some other types of UGRs, such as disk type UGs, blended-wing-body shape UGs, solar-powered UGs, and so on, as shown in Fig. 5.
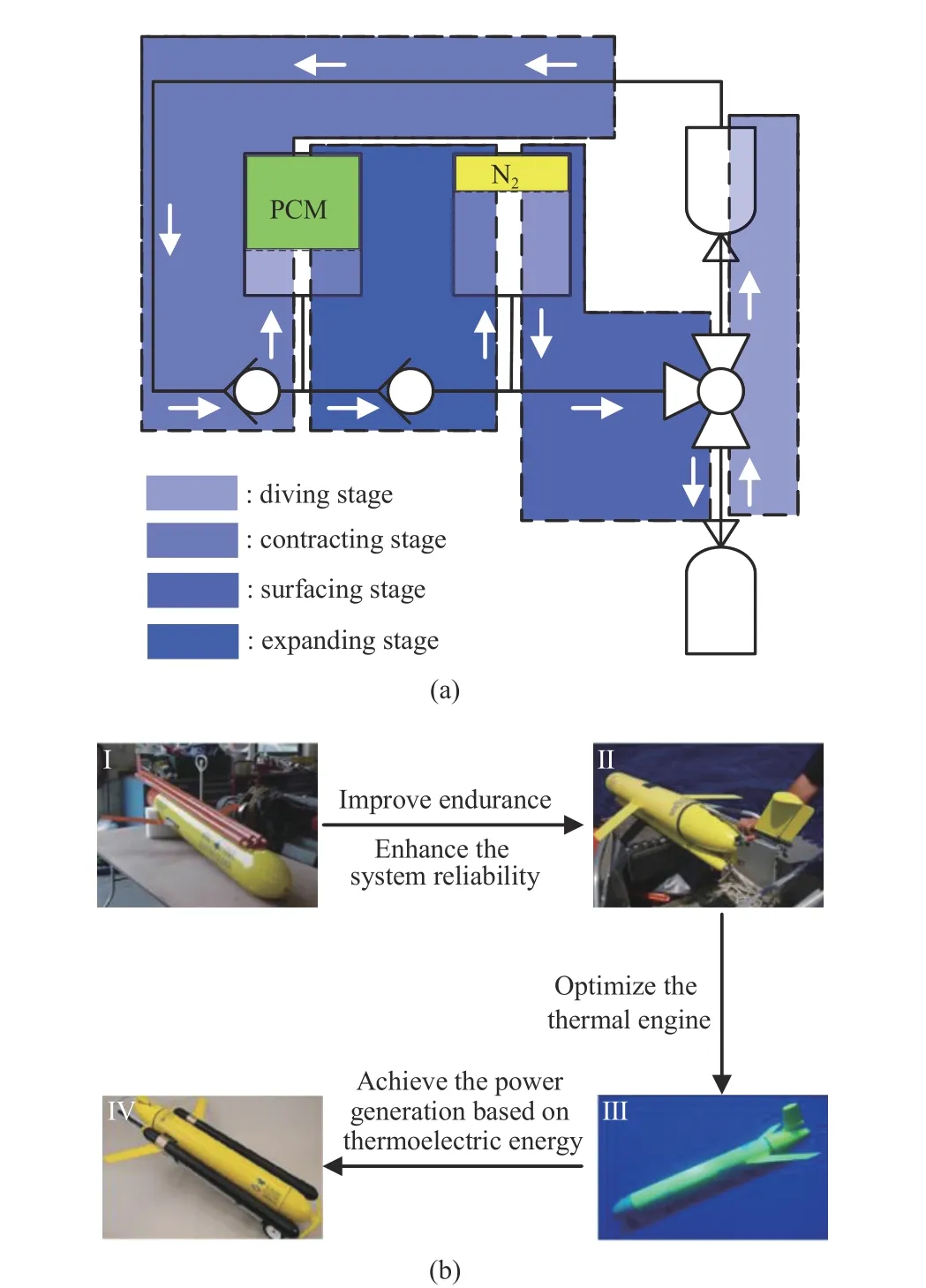
Fig. 4. The illustration of TUGs. (a) The thermodynamic cycle of TUG [9];(b) Four generations of Thermal Slocum [74].
Disk type UGs generally have the shape of a disc, and own some unique motion characteristics, such as omnidirectional motion characteristics and ground performance [78], [79]. The Kyushu University developed a disk-type underwater glider with a length of 1.9 m [78], which was equipped with a suction and drainage buoyancy adjustment mechanism. In particular, four slider mechanisms were arranged around it to adjust the attitude. The UG carried out oceanographic observations in the western waters of Kami-Goto Island of Japan.Dalian Maritime University has also carried out research on disk-type underwater gliders. Aimed at its three-dimensional(3D) dynamic modeling [80], vertical plane control [81], and steering control [12], there were some works. In order to improve the hydrodynamic performance and gliding economy of the disk-type underwater glider, a new type of disk-type UG was proposed by Harbin Institute of Technology university. Based on the CFD simulation, the variation law of key parameters at different angles of attack verified the effectiveness of the numerical calculation method [82].
Blended-wing-body shape UGs mainly refers to a type of UG that imitates the shape of the airfoil of an aircraft. The large wingspan allows for excellent hydrodynamic performances. Since 2003, the Scripps Institution of Oceanography and the University of Washington have jointly developed large-scale blended-wing-body shape UGs. The typical representatives were X-Ray and its improved version Z-Ray,which were similar in shape to manta rays. The lift-to-drag ratio can be significantly improved in gliding motion. The ZRAY had a 6.1 m wing span and 17:1 lift-to-drag ratio, which can achieve a horizontal speed of about 1.8 m/s for a 38 L buoyancy engine. The Z-RAY developed in 2010, had a liftto-drag ratio of up to 35:1, and can accomplish the task of tracking and identifying marine mammals by airborne acoustic sensors [17]. Northwestern Polytechnical University has carried out a lot of research on airfoil underwater gliders,mainly focusing on its energy consumption analysis and optimization [83], [84], hydrodynamic optimization [85], and gliding motion optimization [86].
Furthermore, Samara National Research University proposed a concept of variable shape UG, in which a basic pneumatic circuit was integrated. Depending on the pressure in pneumatic muscles, it can drive the pneumatic muscles fixed to the ribs of the robot’s robust body hull deformation[87]. Osaka Prefecture University developed a solar powered underwater glider, Tonai60 [88], which adopted suction and drainage and moving sliders to adjust buoyancy and attitude.
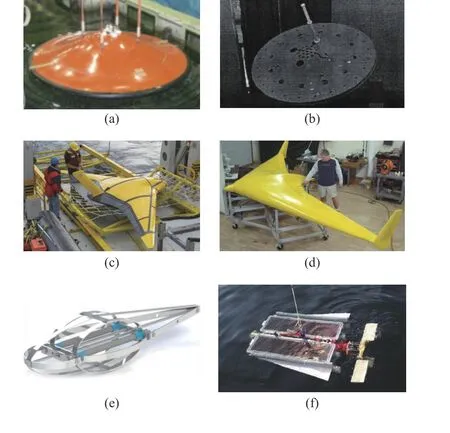
Fig. 5. The overview of other UGs. (a) Boomerang [78]; (b) Disk-type UG[79]; (c) X-Ray [17]; (d) Z-Ray [17]; (e) Anisotropic body UG [87]; (f) Tonai60 [88].
III. KEY TECHNOLOGIES OF UNDERWATER GLIDING ROBOTS
A. Design of the Buoyancy Driven System
As the only power source, the buoyancy driven system is one of the most important mechanisms of the traditional underwater glider. Nowadays, mainstream buoyancy driven systems adopt the way of changing the volume, which can be divided into three types.
First, the piston-type suction and drainage schemes were widely used [21], [25], [28]. With this method, the motor will drive the piston to move in or out to flow the liquid, thereby changing the volume. Second, the two-way drive internal and external bladder system applies the motor to drive the pump to carry out two-way liquid transform [61]. Third, different from the second way, the one-way liquid system only drives the pump to move the liquid from the internal bladder to the external bladder to increase the buoyancy [3], [5], [7]. When diving, the liquid can be automatically inhaled with the aid of the atmospheric pressure and the negative pressure of the internal bladder, thereby reducing the buoyancy.
Based on the above schemes, from the perspective of the operating depth of the underwater glider, the current buoyancy driven systems can be classified into two types: shallow-sea and deep-sea.
1) Shallow Sea Type
Due to the relatively low pressure in the shallow sea, it can be roughly divided into a piston-type mechanism [21], [60],[63] and an internal and external bladder system based on a gear pump [61]. Specifically, the advantage of the piston-type mechanism is the high efficiency since it is directly driven by a motor. However, this way is limited by the water depth and motor power, thus it is only suitable for shallow sea. Most of the current BUGs mostly applied this kind of mechanism [11],[54]–[56], and used the syringe method to achieve suction and drainage. Notably, since the piston needs to be exposed to water, there is a dynamic sealing problem. In addition, the internal and external bladder system based on the gear pump is also another choice. Its advantage lies in the simple structure, but the gear pump has a certain leakage phenomenon.
2) Deep Sea Type
The pressure in the deep sea is high, and the axial piston pump is a popular choice. ALACE proposed a detailed buoyancy driven system scheme based on an axial piston pump [3]. The system was composed of an outer oil bladder and an inner oil cylinder, and the buoyancy was changed by one-way oil discharge and negative pressure oil absorption.When the hydraulic oil is all in the inner cylinder, the floating command starts the hydraulic pump, leading to that the oil entered the outer oil bladder through a one-way valve. The one-way valve can prevent the oil from flowing back to the inner cylinder. When diving, the inner cylinder is in the negative pressure state. Therefore, when opening the solenoid valve at this time, and the seawater and atmospheric pressure would press the oil back to the inner cylinder. Besides, the axial piston pump has the advantage of high volumetric efficiency under high pressure, but the oil absorption capacity is insufficient. Since the inner cylinder is in the negative pressure environment, tiny vacuum bubbles are easily segregated at the oil inlet end of the micro axial piston pump when transforming the oil from inner to outer bladders. This phenomenon will cause the problem of air lock, and make it difficult to pump the hydraulic oil into the outer bladder.
In response to the air lock phenomenon in ALACE,scientists have successively proposed many solutions. The Seaglider added a booster pump, which sent the hydraulic oil first to the booster pump and then to the high pressure hydraulic axial piston pump [5]. The designers of Spray believed that the main reason with ALACE was the low compression ratio of the pump [7]. Small air bubbles made the hydraulic oil a compressible fluid, and the piston could not increase the fluid pressure to the surrounding exhaust pressure due to the limited compression ratio, further stopping pumping. As a result, Spray’s pumps featured a different design with a compression ratio greater than 3:1. There were no ports or hydraulic space due to the use of a pop-up valve.Laboratory tests showed that the pump could move relatively dense slurries of bubbles at high pressure owing to its high compression ratio. Besides, the entrained air bubbles could be effectively directed towards the exhaust valve rather than being trapped.
B. System Model of Underwater Gliding Robots
1) Dynamic Model
The dynamic model for gliding motion is crucial for motion analysis and controller design. We introduced the dynamic model from the point of classification of UGRs, i.e.,traditional UGs, HUGs, and BUGs. Therein, the dynamic model of traditional UG is the basis. Leonard and Graver [25]of Princeton University gave a general method for constructing gliding dynamics equations through momentum and kinetic energy equations. So far, most of the research on UGs took this method as the basis of dynamic analysis. The basic idea of the method is to use the conversion relationship between kinetic energy and momentum with Newton’s laws.In detail, by regarding the buoyancy and attitude adjustment mechanism as internal sub-modules, the sub-kinetic energy of the body, the additional mass, buoyancy and attitude systems are calculated, respectively, so as to obtain the total kinetic energy of the system. Further, via deriving the kinetic energy with respect to the linear velocity and the angular velocity,respectively, the momentum and the angular momentum can be obtained. Moreover, their derivatives can also be obtained by calculating the external force and torque. Therefore,based on the above ideas, the dynamic equation of the underwater gliders body can be obtained. The basic principle is as follows [25].
DenotePand Π as the momentum of the vehicle-fluid system and total angular momentum with respect to (w.r.t.)the body frame. The relationship can be illustrated as
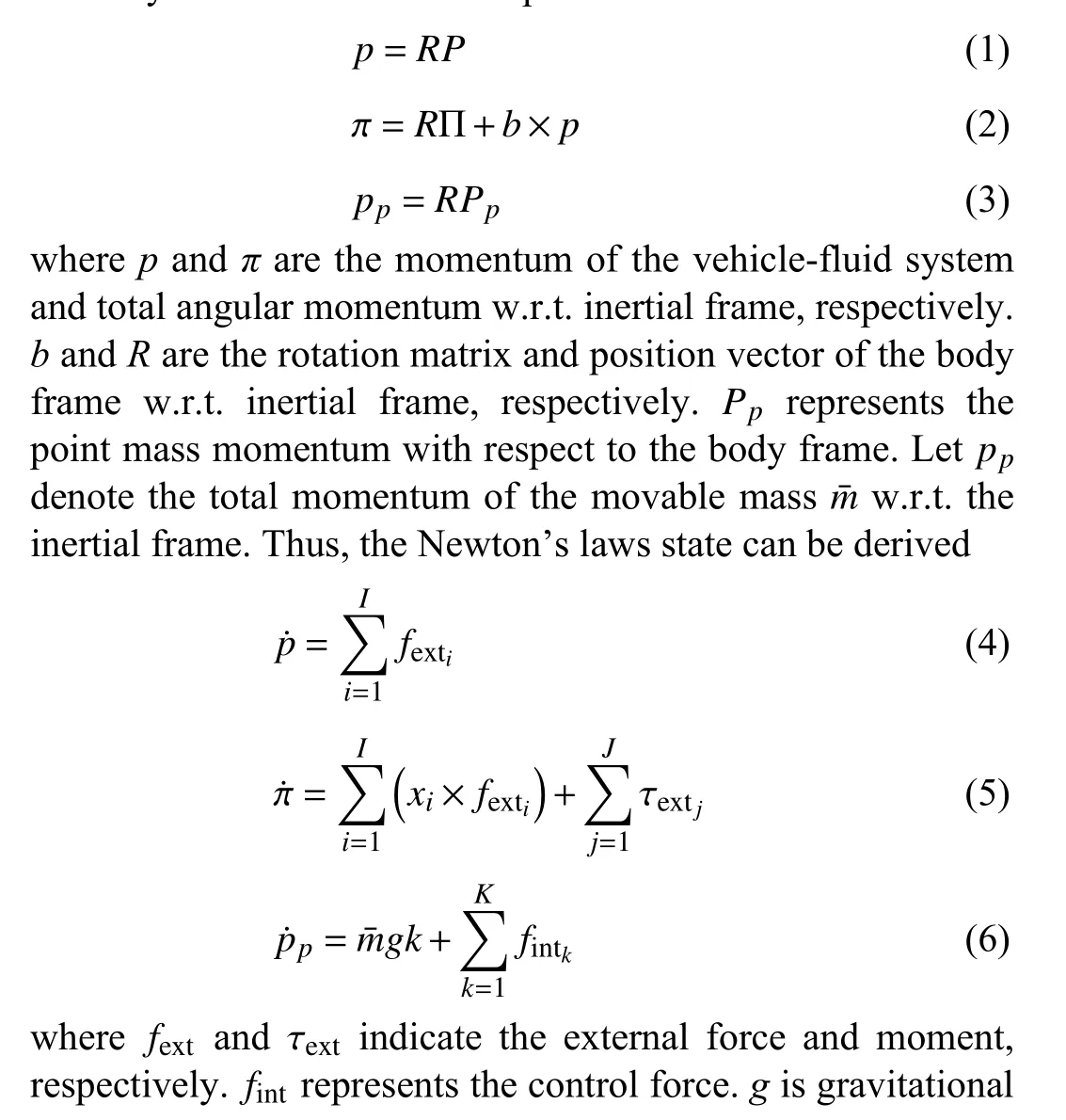

In particularly, during the calculation of the resultant external force, the hydrodynamic force is one of the main external forces on the UG. For the dynamic modeling of the UG, the quasi-steady model is generally adopted for analysis.The hydrodynamic forces are related to the velocity and orientation of the robot relative. In order to facilitate analysis,the velocity coordinate systemCvis usually introduced to characterize the relative attitude. Thereafter, the relative orientation is essentially the rotation relation between frameCvand body frame, which can be parameterized by the angle of attack αband the sideslip angle βb. Hence, the hydrodynamic forces of body and movable surfaces and their moments can be calculated [63].
For the dynamic model of HUGs, most of them are based on the propeller and buoyancy driven system, where the buoyancy driven system is the same as that of traditional gliders.For propeller dynamics, the current modelling methods mainly included circulation theory design and data mapping methods.However, the circulation theory needs to collect various experimental data of blade sections, the calculation of which is cumbersome, and accurate data needs to be supported.Therefore, the general design approach was to use a simple quadratic model combined with empirical data [89]. The propeller thrustfTand moment τTw.r.t. speednand diameterDcan be described as follows:

whereKfandKτare positive thrust and moment coefficients,respectively, which can be obtained by open-water test.
Considering that most of the current BUGs adopted rigid body materials, its dynamic modeling can combine the modeling method of traditional UGs with bionic principles.Compared with the traditional UGs, BUGs generally controlled the attitude via rotatable surfaces rather than the internal adjustment mechanism. However, the rotatable surfaces were not considered in traditional modelling methods. In order to deduce the dynamic model of the gliding robotic dolphin, Wuet al.[58] conducted a separate force analysis on each rotatable surface and integrated it into the gliding dynamic model, but the research was limited to the two-dimensional steady-state gliding motion analysis. Yuanet al.[90] extended it to a 3D dynamic model, which comprehensively considered the factors of rotatable surfaces, buoyancy driven and attitude adjustment mechanisms. Michigan State University has also carried out 3D dynamic modeling research on a gliding robotic fish, mainly using the tail fin to achieve a 3D spiraling motion [91]. However, the above studies only established the dynamic model of the gliding motion, lacking the researches on bionic motion. Wanget al.[59], [63] focused on the threedimensional dynamic integrated model of the gliding and bionic motions for the gliding robotic dolphin, and the gliding dynamics based on quasi-steady model and multi-link-based bionic dynamics were derived with the aid of sufficient experimental verification. The obtained results showed that the built model had high accuracy.
2) Energy Model
For underwater gliding robots, energy consumption is always one of the most important key indicators. In general, the main energy consumption comes from the buoyancy driven system, attitude adjustment system, control system, sensing system, communication system, and propulsion system.
In terms of the buoyancy driven system, the main difference lies in the electrical and thermal energy. The main energy dissipative components of the electrical buoyancy system method include the solenoid valve and the pump system.Concretely, since the power consumed by the solenoid valve is a fixed valuePv, its energy consumption can be obtained based on the liquid volume ΔVand solenoid flowqv. In addition, the consumption of the pump system is related to the depth. Generally, there are two ways to calculate the energy.On one hand, the power of the pump at different depthsPp(z)can be measured in advance, and the power-depth function relationship can be fitted to calculate the energy consumption.On the other hand, since the hydraulic pump overcome the water resistance to accomplish buoyancy change, the energy consumption can be calculated combining the resistance energy with the working efficiency ηpof the hydraulic pump.The final energy consumption can be described with the following formula [92], [93]:
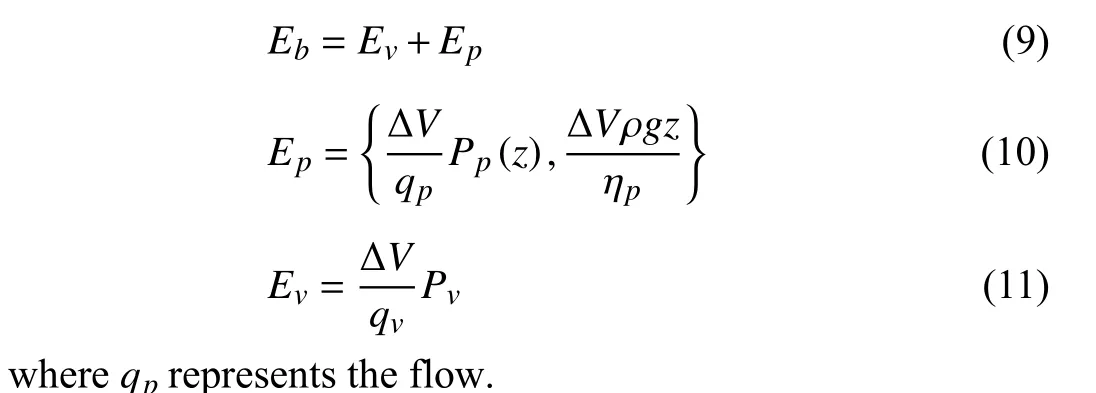
With regard to the UG based on thermal energy, its energy consumption is mainly from the solenoid valve since the driving force comes from the accumulator and heat exchanger,which consumes no more extra energy.
As for the attitude adjustment system, most traditional underwater gliders apply internal moving sliders to adjust the pitch and roll angles, further achieving steering through roll.Generally, it can be assumed that the power of motor that controls the slider at a fixed speed is a constant value [92], or a function value related to the real-time attitude [93]. Based on this assumption, the energy consumption can be calculated.For bio-inspired underwater gliders, the attitude adjustment system usually adopts a combination of internal sliders and external control surfaces. Concretely, the former is the same as that of UG, and the latter involves complex hydrodynamic analysis with limited studies.
For the control, sensing, and communication systems, their energy consumption is closely related to the working time.The control system generally needs to keep working continuously, and some sensors, such as an altimeter, DVL,etc., work intermittently, while the communication system only works in the stage of out of water. Further, since the working power is less affected by the external environment,their power can basically be assumed to be a fixed constant while the time is variable.
For the propulsion system, the power can be obtained fromthe propeller dynamics model driven by the hybrid, and the kinetic energy consumption can be derived based on the working time of the propulsion system and the motion efficiency [89]. According to the propeller characteristics, the power consumption can be written as
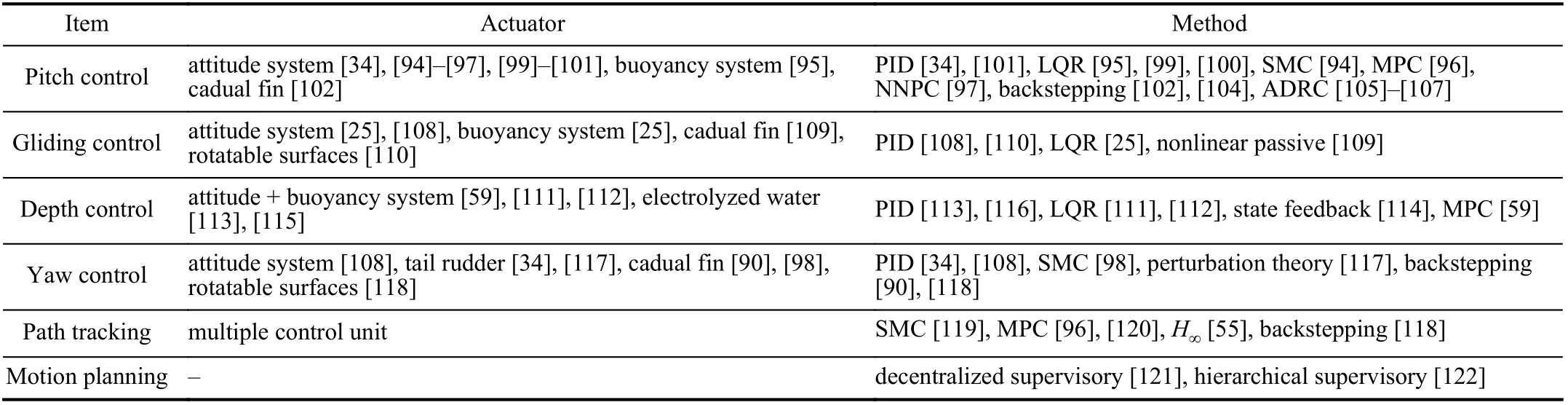
TABLE IV THE OVERVIEW OF GLIDING MOTION CONTROL

In terms of the BUG, the power of its propulsion system comes from the fluctuation of bionic driving mechanisms,which generate the interaction force with the external water environment. In theory, the power calculation can also be carried out using the dynamic model, but the difficulty lies in the highly nonlinear characteristics of hydrodynamics.Compared with the traditional propeller, its parameters are difficult to determine, leading to poor model accuracy, thus there are fewer studies on this issue.
C. Control of Underwater Gliding Robots
1) Motion Control
According to the classification of controlled variables, the related research on gliding motion control can be divided into the categories of vertical motion control, steering control, path tracking, and motion planning. Among them, the objects in the vertical control mainly include pitch angle, glide angle and depth. The typical control methods are listed in Table IV.
Steady-state gliding motion in the vertical plane is one of the most common motions for UGs, resulting in a sawtoothlike motion trajectory. Generally, the buoyancy driven and attitude adjustment systems are applied as the main actuators to change the gliding motion state in the vertical plane.
In aspects of pitch and gliding control, there were various studies. In order to solve the coupling problem of buoyancy and pitch control, Yang and Ma [94] adopted an inverse system approach to decouple the original multiple input multiple output (MIMO) system into two independent single input single output (SISO) linear subsystems, and then controlled each subsystem separately through slide mode control (SMC). The simulation verification was carried out.Considering the effect of water flow disturbance in the glider MIMO system, Isa and Arshad [95] compared the performances of the state feedback controller and linear quadratic regulator (LQR) through simulation analysis. The obtained results showed that the performance of LQR was better than that of the state feedback controller and can compensate for water flow perturbation. Shanet al.[96] proposed the model predictive control (MPC) method based on recurrent neural network to control the pitch angle, and the effectiveness was validated by simulation. Isaet al.[97] designed a neural network predictive controller (NNPC), and compared it with MPC and LQR through simulation. Zhanget al. designed an SMC controller for the gliding robotic fish, achieving directional motion [98]. Nohet al.[99] designed proportionalintegral-derivative (PID) and LQR controllers for underwater gliders, both of which can achieve successful pitch control.Chenet al.[100] presented the LQR controller to adjust the vertical motion of the underwater glider. Liuet al.proposed a fuzzy PID controller for the pitch control of the underwater glider, which can adjust the PID parameters online [101]. Wuet al. designed a backstepping controller to achieve the pitch regulation [102]. Isaet al.used a neural network to fit a dynamic model, and realized the gliding motion control through MPC [103]. Caoet al.designed an adaptive backstepping controller, whose performance was smoother than that of LQR [104]. Songet al.proposed an active disturbance rejection control (ADRC) based on model step size to improve the control accuracy of pitch angle in gliding motion [105]. Suet al.adopted ADRC for attitude control, and modified the control parameters through the reinforcement learning algorithm [106]. Guoet al.proposed an ADRC controller based on model compensation for pitch control in gliding motion, which improved the response speed compared to the pure ADRC method [107]. Leonard and Graver [25] established a dynamic model, by linearizing the LQR controller,which was designed to control the glide angle. Mahmoudian and Woolsey applied PID to control the yaw angle [108].Zhang and Tan [109] designed a nonlinear passive controller to control the glide angle. Yanet al.modeled the effect of seawater density and pressure changes on the underwater glider, and applied the PID to control the glide angle [110]. In addition to internal sliders, gliders with movable airfoils and the BUGs have external control surfaces, which can also be applied for a two-dimensional gliding motion.
With regard to the depth control of gliding motion, Claus and Bachmayer proposed an energy optimal depth controller with a reduced order linear model [111]. Joo and Qu [112]performed the gliding motion by using the LQR method to control the depth of the zigzag gliding path, and carried out simulation verification. Via simplifying the dynamic model and exerting yaw control, Wanget al.proposed an MPCbased depth control for the gliding motion of the gliding robotic dolphin [59]. In recent years, in order to improve the endurance of bio-inspired AUVs, many scholars have also carried out a lot of research on the buoyancy mechanism of bionic robotic fish. Keow and Chen designed an artificial swimming bladder enabled by water electrolysis [113]. In 2014, Makrodimitriset al.added a pump-type buoyancy mechanism to the bionic robotic fish and designed a full-state feedback controller to achieve depth control [114]. In 2003,Guoet al.proposed a buoyancy regulation scheme based on electrolyzed water and applied it to a micro robotic fish [115].In 2011, Umet al.designed a water electrolysis device using ion-exchange polymer metal composite (IPMC) materials,controlled by a solenoid valve [116].
In terms of heading control, the traditional UGs achieve steering by a laterally movable mass or a tail rudder. For Slocum, Graveret al.[34] designed a PID controller to adjust the yaw angle through the tail rudder. Mahmoudianet al.[117] obtained an approximate analytical expression of the steady-state steering motion through the derivation of the canonical perturbation theory, based on which, the required rudder angle was calculated accordingly. Besides, the deviation caused by the approximate processing in the expression can be compensated through feedback control. With the aid of flippers of the gliding robotic dolphin, Yuanet al.proposed a heading controller by combining the backstepping method with slide mode observer [90].
Path tracking control has a characteristic of strong comprehensiveness, and generally needs to control multiple states at the same time [118], [119]. Since the UG dynamics have significant nonlinear and underactuated features with strong coupling states, path tracking has high requirements for the designed controller. Abraham and Yi [120] proposed an MPC controller incorporating time-pause technology for the gliding path tracking, and compared it with PID through simulation. The simulation results showed that the designed controller had better performance. To track 3D helical trajectories, Zhang and Tan [55] designed a two-degree-offreedom controller consisting of a feed-forward inverse controller and a robustH∞controller. By comparing with a PI controller pure feedforward inverse controller, the simulation results indicated that the designed controller had better performances in terms of convergence speed, phase delay, and steady-state error.
Motion planning is the control at the decision-making level,whose purpose is to decompose high-level tasks into specific behavioral control flows, so that the UG has the ability to make autonomous decisions. Zhanget al.[121], [122] proposed a three-layer decentralized supervisory control structure based on the Ramadge and Wonham supervisory control theory of discrete event dynamical systems. The structure consisted of mission-planning, task-planning, and behavior layers. However, this method was far from practical at present, since the planning layer was difficult to combine with the actual control system at the behavior layer [97]. Moreover,in recent years, motion planning and control based on learning algorithms have also attracted attention in the field of robotics,but it is seldom applied to underwater robots [123], [124].
Although there are many control methods for UGRs to accomplish the underwater task based on the UGs, most of them were for basic motion control. Thus, most of the existing UGRs do not have the ability to operate underwater. By borrowing robotic manipulators followed by their control methods [125], [126], UGRs can obtain the ability in autonomous operation, such as underwater maintenance and handling.
2) Gliding Optimization
In order to further increase the range of gliding motion and reduce the energy consumption, scientists have carried out research on the optimization of motion parameters, shape optimization and optimal path of underwater gliding robots.
In terms of motion parameter optimization, Yuet al.proposed a motion parameter optimization method and sensor scheduling strategy for the sea-wing underwater glider to improve the range of gliding motion [127]. Xueet al.established an energy consumption model for the hybrid-driven underwater glider Petrel-II, and optimized key parameters to reduce the energy consumption under the influence of ocean currents [128]. With the consideration of changes in seawater density, Yanget al.improved the range by analyzing gliding strategies and optimizing motion parameters [129]. Songet al.proposed a novel energy model based on the least squares support vector machine (LSSVM) and particle swarm optimization (PSO) algorithm, demonstrating that the LSSVM-PSO model was superior with a large enough training sample size[130]. The above methods mainly took the maximum range or minimum energy consumption in the steady-state gliding process as the index, and calculated the optimal motion parameters of the UG according to the dynamic constraints.
With regard to shape optimization, Sunet al.optimized the structural shape of the flying-wing underwater glider to improve the gliding performance [86]. Fuet al.proposed a multi-objective shape optimization problem for an underwater glider, and solved it using a genetic algorithm to reduce the energy consumption of the gliding motion [131]. Liet al.simplified the shape optimization problem by optimizing the cross-sectional airfoil of a flying-wing underwater glider[132]. Donget al.applied a data-driven discrete global optimization algorithm to establish a parametric model of the flying-wing underwater glider structure, further optimizing the buoyancy-to-weight ratio of the cabin-frame coupling structure [133]. Zhanget al.improved the Kriging-HDMR method, based on which the lift-drag ratio was improved[134]. Yanget al.designed a shape optimization method for the Petrel-L based on the approximate model technology and internal penalty function [135]. The above methods are mainly aimed at the flying wing-shaped underwater glider with a fused wing body, and the relationship between its shape and gliding performance was modeled as a high-dimensional nonlinear problem. The parameters, such as lift-drag ratio,were taken as the goal to solve the structural shape optimization problem.
IV. DISCUSSION AND FUTURE DEVELOPMENT
At present, although scientists have carried out various meaningful and valuable research on underwater gliding robots, there is still a large gap in order to achieve the goal of conquering the ocean. More technical research is still needed in the future.
A. Prototype Development
In terms of platform design, traditional underwater gliders have been put into mass production, and their maximum diving depth can reach 10 000 meters, which means that most ocean areas can be reached. However, the application scenarios of traditional UGs are limited due to poor maneuverability, which can only complete some ocean observation operations. In addition, with the development of technology,various hybrid-driven underwater gliding robots, including propeller drive, bionic drive, thermoelectric drive, etc., have emerged, endowing traditional UGs with stronger motion performances. Specifically, although the propeller-based underwater glider has the characteristics of high swimming speed and strong endurance, it has the disadvantages of low energy efficiency, poor concealment, and the damage to the ecological environment. It is not conducive to the sustainable development of the ocean, and it is difficult to adapt to the complex ocean environment near the shallow sea. In recent years, with their unique bionic shape and motion mechanism,bionic underwater gliding robots have gradually attracted the attention of scientific researchers. This type of underwater gliding robot not only has the strong endurance of traditional gliders, but also has higher maneuverability than conventional AUVs. However, the current research on the bionic mechanism of BUG is not sufficient. Due to the limitation of driving materials and mechanisms, its propulsion efficiency is far behind that of biological fish, and further in-depth research is still needed.
Further, it will be towards bionic and intelligent development in the future. On one hand, based on the interdisciplinary characteristics of bionics, robotics, and control, the bionic underwater gliding robot has high maneuverability, strong endurance, strong concealment, and low disturbance by virtue of its streamlined low-resistance shape and unique motion mechanism. It has strong potential in practical applications.Further, with the development of bionic mechanism, materials, drivers, and other fields, BUG will play an increasingly important role. On the other hand, with the aid of artificial intelligence, deep learning, reinforcement learning, and other technologies, underwater gliding robots will own the characteristics of strong intelligence. Equipped with a wealth of high-precision sensing systems and computing modules, the underwater gliding robot can obtain the intelligent perception,planning, and decision-making capabilities, so as to better accomplish the tasks of ocean exploration and resource development. In addition, the group research on underwater gliding robots will also be one of the important fields to enhance their intelligence. Through collaborative cooperation, tasks that a single platform cannot do well can be accomplished.
B. Technology of Buoyancy Driven System
With regard to the buoyancy driven system, from the perspective of energy principle, the buoyancy driven systems of most underwater gliding robots can be divided into electric,thermoelectric and thermoelectric-electric hybrid driven systems. Among them, the thermoelectric ones mainly use the temperature difference to convert thermal energy into mechanical energy. At present, great progress in TUGs has been made, but the stability and driving ability are still insufficient, leading to that the application scenarios are extremely limited. As the mainstream, electric-based buoyancy driven system mainly includes a piston-type structure for low-pressure environment, and an oil bladder structure for deep-water environment. Most of the piston-type structures are directly driven by motors, while the latter are mostly driven by hydraulic pumps. In general, most underwater gliding robots with a maximum diving depth of more than 1000 meters use plunger pumps, which are characterized by high volumetric efficiency under high pressure. Those with a diving depth of fewer than 300 meters mostly use gear pumps or piston drive. On one hand, most of the popular piston-type mechanisms refer to the Slocum shallow-sea glider. On the other hand, most of the deep-sea mechanisms are based on ALACE’s buoyancy driven system, and solve its air lock phenomenon in various ways. From the point of energy consumption, the shallow-sea drive system consumes energy during both the floating and diving stages. The deep-sea drive system mostly only needs to overcome the pressure in the diving-floating transition stage, while the atmospheric pressure and negative pressure in the cavity are applied to achieve buoyancy reduction in the floating-diving transition stage, so no energy is consumed. However, since the pressure on the water surface is inherently small, the energy saved is still limited, and theoretical breakthroughs in principle are still needed.
In the future, the goal of reducing energy consumption will be committed, and the main research fields may include three aspects. First, on the basis of existing principles, including the development of more efficient hydraulic pumps and motors,some energy consumption should be optimized. Second, some innovation may be urgent. For example, it is well known that water pressure increases with depth, and the main energy consumption of the buoyancy driven system comes from the high-pressure liquid discharge operation at the diving to surfacing point. Therefore, determining how to use the natural characteristics of water pressure to improve the buoyancy driven system is also a question worth exploring. Third, the performance based on TUG may be optimized. The existing thermoelectric energy system has poor stability, and its application is limited in operating area. Therefore, determining how to develop new materials and optimize the driving mechanism needs to be further explored.
C. Motion Control and Optimization
Regarding motion control and optimization, most of UGRs currently focus on system modeling, attitude control, depth control, path tracking and planning. Since underwater gliding robots commonly adopt rigid shells and their motion mechanisms, their motion and energy consumption modeling are not complicated. Comparatively speaking, it is relatively difficult to establish the system model for BUGs due to the bionic motion mechanism. As the most difficult part of motion modeling, hydrodynamics are generally conducted by the quasi-steady-state lift-drag model. However, the ocean environment is extremely complicated owing to unpredictable ocean currents and interference. As can be seen in Table IV,the current motion control algorithms often applied modelfree methods, but these algorithms are easily affected by external interference with poor robustness. Therefore, some model-based robust control algorithms have received attention in recent years. Some methods do not require high models,such as the sliding mode control, and model predictive control. However, the implementation of the above methods may be slightly more difficult, and the control parameters are also more complicated. Besides, since the underwater gliding robot has obvious characteristics of time delay during gliding motion, the above methods are not suitable to be applied directly due to poor convergence, which usually needs to be improved.
Moreover, with the rapid development of artificial intelligence algorithms, future control algorithms will be enhanced in terms of strong intelligence, adaptability and antidisturbance. With the aid of deep reinforcement learning algorithm, the intelligent control of robots has attracted the attention of researchers. Through the preliminary offline training, UGRs can obtain strong environmental adaptability,so as to better complete ocean operations. However, the ocean environment is extremely complex, and the disturbances of ocean currents are unpredictable. Therefore, determining how to ensure the convergence of the learning algorithm and optimization methods, further improving the stability of the system is a problem worth exploring. Besides, in order to improve the system robustness, some optimization based random searching algorithms, such as bio-inspired control and neural networks, are also effective solutions [136]–[138]. In addition, accurate perception ability is an important basis for control tasks. With the consideration of poor underwater visual environment such as weak light, strong attenuation, and blurring, the requirements of perception systems and algorithms are also relatively high. Besides, conventional acoustic equipment has a relatively long detection range, but lacks perceptual details and intelligence, while traditional visual equipment is greatly affected by the water quality environment owing to poor image quality and a small field of view.Therefore, how to fuse the information of multiple sensors to provide high-quality input for motion control needs to be further explored. Besides, since the underwater medium is different from air, it is necessary to learn from the calibration algorithm of industrial robots to achieve accurate underwater visual calibration [139]. Further, underwater simultaneous localization and mapping is also another hot issue. Under sensor information which may be unreliable and sparse, some intelligent methods via referring to the field of industrial robots and application need to be explored [140], [141],further building the accurate map.
D. Application Scenarios Prospect of UGRs
Most current applications of underwater gliders focus on ocean observation missions. According to different observation scenarios, they can be mainly divided into ocean hydrological observation, profile observation of seabed topography, biological observation of marine scientific exploration,and so on. With onboard payloads, such as water quality sensors, conductance, temperature and depth sensors, acoustic sensors, hydrophones, current meters, and turbulence sensors,real-time underwater information can be collected and stored,and sent to shore-based systems through satellite or wireless communication. For example, Wallet al.integrated a hydrophone into the UG, and successfully detected the sound of biological fish in a large space [142]. Schultzeet al.acquired ocean microstructure turbulence data sets using UG,and analyzed the dissipation rate of ocean turbulent kinetic energy [143]. However, nowadays, due to the poor maneuverability of UGs, it is difficult to complete underwater tasks in complex sea areas, hindering its application development.
With the development of ocean science and robotics, UGRs play an increasingly important role in various ocean applications. With the emergence of new UGRs, the motion performances have been strengthened, greatly expanding the application field.
1) The establishment of an ocean stereoscopic observation network will be an important application scenario in the future. Ocean science needs the supports of long-term observation, and depends on data accumulation of the ocean.The UGRs can not only achieve long-term all-weather observation, but also ensure its high observation accuracy and resolution due to its high maneuverability.
2) Deep-sea archaeology and rescue is another typical point.Most of the existing technologies rely on ROVs with limited operating range, while traditional AUVs cannot guarantee long-lasting operations. Therefore, by carrying payloads,UGRs will play an important role in the future.
3) With the consideration of the complex environment in the shallow sea, it is difficult to meet the task requirements for traditional UGs due to their poor maneuverability. The new UGRs, especially the BUGs, can not only realize the nearshallow sea operation, such as topographic and landform observation, but also will not cause harm to the environment.
V. CONCLUDING REMARKS
Conquering the ocean has always been an urgent pursuit of human beings. The diversity of underwater vehicles for ocean exploration has been enriched. To overcome the endurance limitations of underwater vehicles, underwater gliding robots have been widely investigated and increasingly deployed in recent decades. Further, in view of existing issues of designed prototypes, many new type platforms are gradually being developed to better accomplish ocean exploration. In this paper, comprehensive research into the underwater gliding robots has been conducted in terms of the state-of-the-art prototypes and their key technologies. More specifically, the traditional UGs, hybrid-driven UGs, bio-inspired UGs,thermal UGs, and other types are introduced in detail. Furthermore, the key technologies, involving buoyancy driven system, dynamic and energy model, and motion control and optimization are analyzed and synthesized. Finally, critical issues and future development are discussed. Thanks to the rapid development of artificial intelligence, communication technology, and internet of things, it is believed that the underwater gliding robots will substantially contribute to the underwater operations, further unfolding an enormous potential in sustainable exploration and exploitation of oceans.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Autonomous Maneuver Decisions via Transfer Learning Pigeon-Inspired Optimization for UCAVs in Dogfight Engagements
- Interval Type-2 Fuzzy Hierarchical Adaptive Cruise Following-Control for Intelligent Vehicles
- Efficient Exploration for Multi-Agent Reinforcement Learning via Transferable Successor Features
- Reinforcement Learning Behavioral Control for Nonlinear Autonomous System
- An Extended Convex Combination Approach for Quadratic L 2 Performance Analysis of Switched Uncertain Linear Systems
- Adaptive Attitude Control for a Coaxial Tilt-Rotor UAV via Immersion and Invariance Methodology