风光互补无人机无线充电基站系统设计
2022-09-06缴德凯李博文霍润琦乔佳越信子萌程诗语
缴德凯 张 岩 李博文 陈 拓 霍润琦 乔佳越 信子萌 程诗语 于 鹏
河北科技大学电气工程学院 河北石家庄 050018
当前,无人机的应用领域已从最初的军事专用,如侦查战况、监视敌情到现在民用、商用的普及,如用物流配送、喷洒农药等。张宇嘉等提出续航时间是验证无人机性能指标的关键,但受飞行重量、飞行速度等因素影响,多旋翼无人机通常只能续航20~40分钟。有限的续航时间造成多旋翼无人机仅能执行短距离和小范围作业任务,严重限制了多旋翼无人机在远距离察打、野外配送等领域的应用。此外,无人机巡检和作业向着无人值守方向发展,给无人机自主电能补给技术提出了新的需求。
现阶段,对于无人机续航问题,建立基站为可行解决方案之一。建立基站的传统方案有以下两种:一种是建立系留式基站对无人机进行电能补给。如杨树峰等提出基于系留式无人机的高空基站通信系统,将控制基站升空高度,通过系留电缆实现对无人机的电能补给,以实现无人机照明、通信等方面电能补给。法国科技公司Elistair在美国得克萨斯州达拉斯举办的AUVSI XPonENTIAL 2017贸易展上发布了Ligh-T 2新型Ligh-T系留无人机站,为无人机实时遥测和监控提供电能补给。但该方案仅适用于无人机近距离长续航作业。第二种方案是建立能量自补给式无人机基站。如佘佳俊等基于无线充电技术的物流无人机及充电桩设计方案提出,在地面建立基站,以GPS系统为无人机进行导航,让物流无人机在送货途中实时判断自身电量,当电量过低时自主导航至距离最近的充电桩进行无线充电,完成充电后继续送货。张岩等提出,太阳能无人机基站采用吊挂方式,不需要地面建站。总体结构可水平旋转,太阳翼可以竖直方向旋转,保证太阳能发电效率。采用L型旋转接口,提高任务灵活程度。但该方案能量供给方式单一,仅适用于太阳能充足地区。因此,还亟须一种充电可靠性高适用于远距离察打,荒野配送的分布式无人机充电基站。
基于以上研究现状,为解决基站供电方式单一,供电可靠性不高的问题,本文提出了一种风光互补型无人机无线充电基站利用风光能源天然的互补性,能有效弥补单独风能与太阳能发电系统在资源上的缺点,提高发电系统的可靠性、平衡性与稳定性,为无人机提供可靠电能补给。采用无线传能充电方式,规避传统接口充电对无人机的精准对接要求,有效解决无人机户外长距离作业续航问题。
1 设计方案
1.1 设计要求
风光互补无人机无线充电基站总体设计如图1所示,围绕风光互补系统的可靠性及充电基站的可实施性目标展开,同时拥有较高的灵活性和自动化程度。其具备一套独立的发电、充电系统,利用光伏发电和风力发电将发出的电能储存到能量管理装置,并由蓄电池向电能传输装置供电,对无人机实现无线充电。同时基站可根据不同气候环境选择合适的风机和太阳能板实现风光互补发电,以此实现效率最大化。并且可以克服光伏、风电输出功率的波动性,再次提高了可再生能源的利用率,满足无人机长距离续航要求。
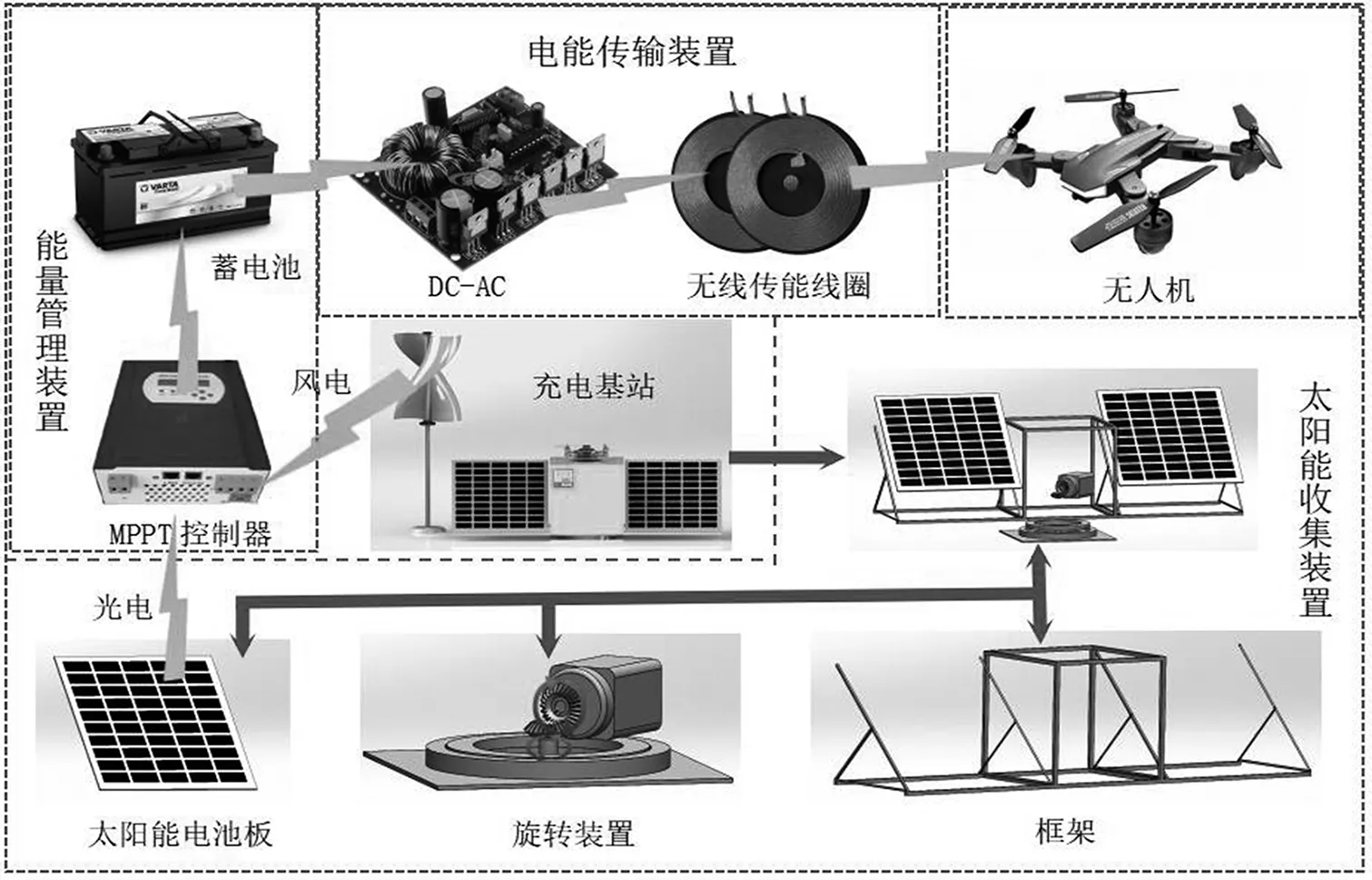
图1 风光互补无人机无线充电基站总体设计
1.2 功能设计
通过建立的倾斜面太阳辐射计算模型为控制系统提供太阳方位角算法,控制太阳能板方向,对光照方向进行实时追踪,使太阳能板最大限度地接触光照,进而更加高效地利用光能,同时垂直轴发电机利用自己较小的转轴半径的优势,可以在较小的风速条件下旋转风叶带动发电机进行发电,通过MPPT控制器对蓄电池充电。无人机电量不足时,可通过GPS导航系统获取距离最近基站的位置,并导航到基站,然后经过降落辅助系统降落在充电平台上方,其内部重力传感器达到预设阈值,基站判断无人机已经降落成功,开始通过无线充电系统对无人机进行充电。充电完成后,无人机可自行飞离基站,无人机飞离后,充电辅助系统自动复位,充电环节结束。无线充电装置进入待机状态,等待下一台无人机的到来。无人机充电基站下方为旋转结构,其内置步进电机及锥形齿轮。单片机通过内部算法对步进电机发出控制信号,以调整基站方向为最佳方位角。由于基站为实时对准太阳角度,太阳平行光对基站主体造成的阴影并不会对太阳电池板造成影响。这种旋转结构实现了基站的实时追光,有效提高了基站对光能的利用率,保证光能的最大限度利用。
1.3 结构设计
用SolidWorks对风光互补无人机充电基站进行三维建模,主体内部结构如图2所示。基站以控制箱为主体,其长1.20m,宽0.35m,高0.40m,内置有MPPT控制器、电机等装置,上方为无线充电装置,充电装置内部搭载重力传感器。

图2 基站主体内部结构图
1.3.1 太阳能收集装置结构设计
对太阳能收集装置进行三维建模设计,整体结构展开图如图3所示,由太阳能电池板、步进电机、锥形齿轮、旋转轴承、基座等组成。步进电机轴上装有锥形齿轮,并固定于基站主体内部,另一锥形齿轮与基座连接固定。为减轻充电基站的质量,框架采用质量较轻且具备一定强度的铝合金材质。装置工作原理:太阳方位角改变时,控制系统向步进电机发出信号,步进电机在锥形齿轮及旋转轴承的辅助作用下带动太阳能收集装置框架沿水平方向转动使基站太阳能板达到最佳方位角。

图3 太阳能收集装置展开图
1.3.2 降落充电辅助系统结构设计
对降落充电辅助系统进行三维建模设计,整体展开图如图4所示,由重力传感器及无线充电线圈组成,充电线圈发射端位于重力传感器上板下方,接收端位于无人机底部,重力传感器上板厚度为3cm,为本文无线充电线圈传输最佳距离。系统工作原理:无人机降落于充电平台上,其质量作用于重力传感器,重力传感器达到设定阈值,向核心控制单元发出信号,核心控制单元判断无人机降落成功,充电开关打开,电能传输装置向无人机传输电能。
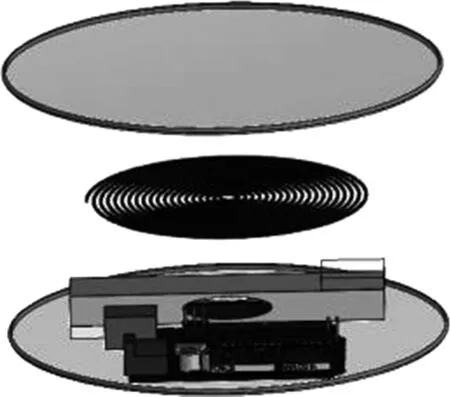
图4 降落充电辅助系统展开图
2 实验分析
2.1 风能系统实验分析
按照无人机充电基站的设计,搭建无人机充电基站原理样机,在样机整体设计中:系统总功率容量为150W,其中光伏为50W,风力系统为100W,蓄电池容量为24Ah,两端最大开路电压为12V。对风光互补发电系统发电功率进行实验验证。在保证太阳能发电系统保持最佳方位角及最佳倾角状态下,在对拖系统(如图5所示)中,利用实验室电动机来拖动基站的风力发电机,利用转速计显示转轴转速,功率表显示输出功率,并且利用改变电动机转速的方法近似模拟一定风速的变化情况,其中风力发电机的转速和风速之间满足:

(为尖速比;为风力扇叶半径)
计算中取=694,=06,进而计算获得对应风速。通过对拖系统实现计算风速、风力发电机转速及充电功率之间关系。
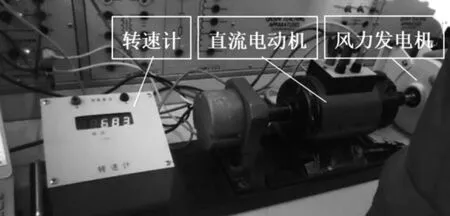
图5 对拖系统实验环境
实验模拟以2.5m/s风速为起始风速,以2.5m/s风速为公差增加,获得七组风力发电机不同转速、最佳光照条件下的数据。测量数据包括各组风速下无MPPT最大功率追踪下和加入MPPT最大功率追踪下的蓄电池充电电压、充电电流,计算获得对应输出功率。最终通过对比每种风速条件下基站对于蓄电池充电功率如图6所示,在MPPT控制器的最大功率点追踪作用下,充电功率的提升效果明显,最终求得MPPT控制器对功率提升的百分比为32.4%。
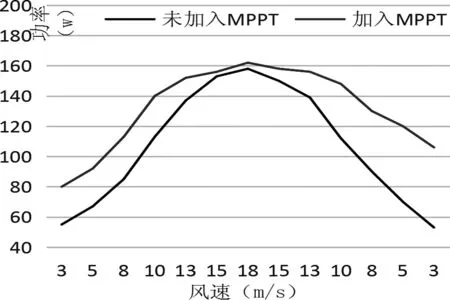
图6 应用MPPT算法功率充电功率提升
2.2 无线传能建模分析
在Matlab中由电感、电阻和电容等元器件组成如图7所示无线传能电路仿真模型,实验验证了模型的准确性。主振电路振荡器选用有源晶振。使用二阶低通滤波器对输出方波的高次谐波进行过滤,使用三极管及其外围电路组成的放大电路将输出的正弦波输送到并联谐振回路辐射。为接收线圈供给能量,测得与电容组成的并联谐振回路的空芯耦合线圈的线径为0.5mm,直径为7cm,电感为47μH,载波频率为2MHz,电容C约为140pF。因而,发射部分采用2MHz有源晶振产生与谐振频率接近的能源载波频率。
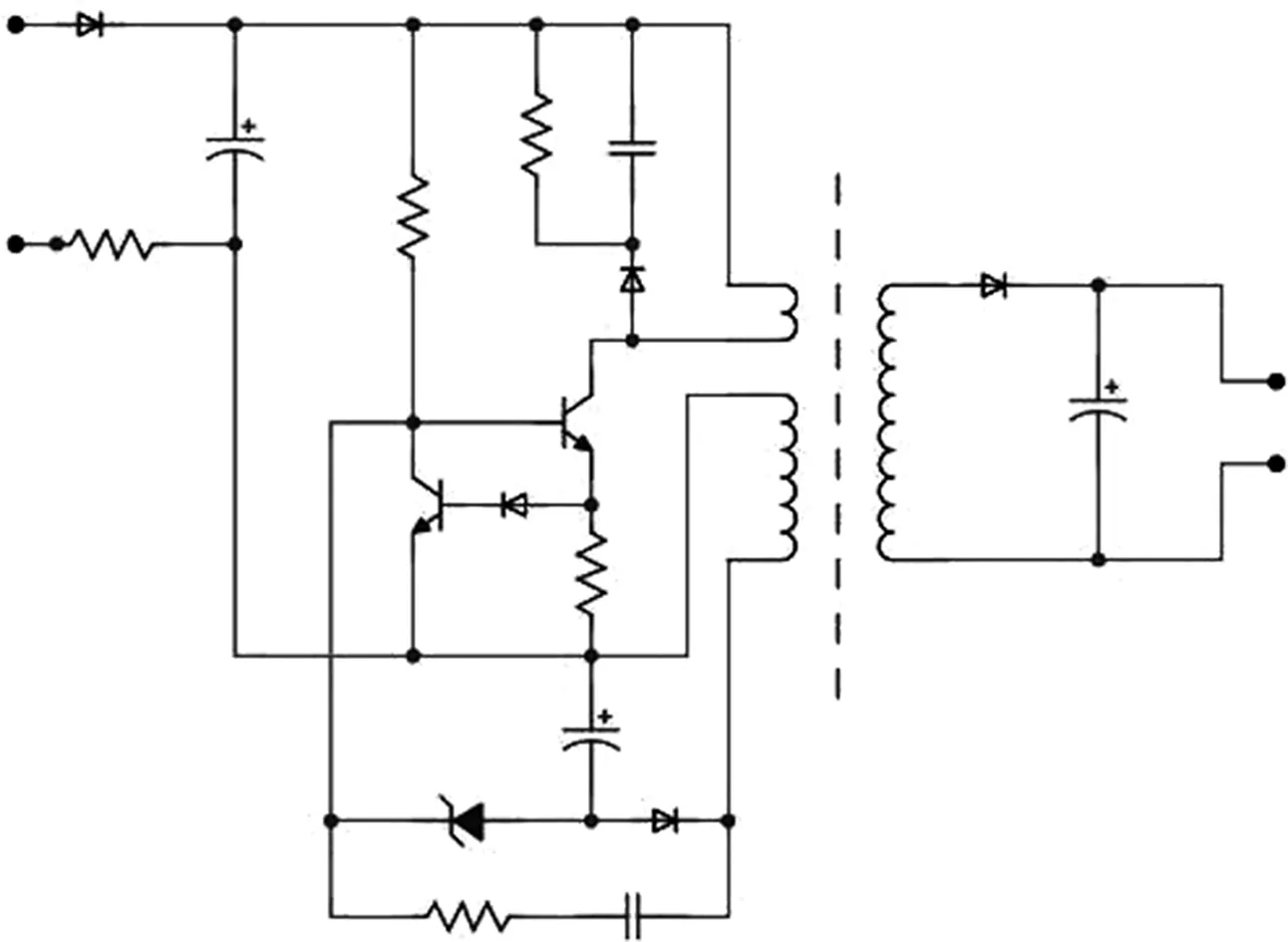
图7 无线传能电路仿真模型
无人机无线充电部分,对充电的平均电流、电压等进行测量,以验证其充电的可行性。实验中以充电线圈间距3mm为起始充电间距,以3mm为公差增加充电间距,分别多次获取充电时输入与输出端平均电压、电流值,最后根据电压、电流平均值得到平均功率与充电效率,获得数据如图8所示。随着感应线圈之间距离的增加,线圈的输出功率先上升后下降,这种现象主要是由无线电能传输的距离传递特性造成的,由表得充电间距在3~6mm时线圈可保持大于60%的充电效率与大于10W的充电效率,且在充电间距为3mm时能保持68%以上的充电效率。当距离小于3mm时,功率达到最大值,并且没有距离的减小而再次增加。基于本实验数据本基站线圈充电间距最终采用线圈间距3mm的充电方式,以保持68%以上的较高充电效率以及较高的充电功率。
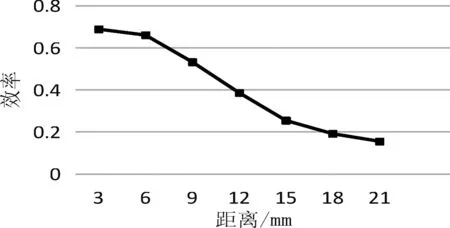
图8 传输效率随距离变化曲线
结语
本文研发了一种更加高效、便利的利用清洁能源的风光互补无人机无线充电基站。通过MPPT的加入,实现基站对于风能、光能清洁能源的最大限度利用,较传统风光发电系统提升32.4%充电功率;通过单片机及步进电机控制太阳能板方位角,实现太阳能电池板追光,以进一步达到高效利用光能。通过无线充电线圈、重力传感器,实现无人机降落在基站充电平台位置时准确、快速充电。并通过实验数据对比,以及效率计算,通过精准控制无线充电线圈发射端和接收端的距离,可使无线充电效率达到70%左右,证明了无线充电技术的可行性。通过对系统整体的设计,实现离网型无线充电基站对无人机的可靠供电。
该基站具有以下优点:(1)摆脱电网限制,可在野外选址建立;(2)充分利用风光互补能源,能源利用率高,供电可靠性高;(3)采用无线充电方式,实现了充电过程的自动化。
