惯性耦合的三自由度导线舞动稳定性和惯性质量防舞机理
2022-09-03温作鹏楼文娟
温作鹏,楼文娟,姜 雄,2
(1.浙江大学结构工程研究所,浙江杭州 310058;2.杭萧钢构股份有限公司,浙江杭州 310058)
引 言
导线舞动是一种对输电线路危害较大的失稳振动,准确、清晰地认识舞动激发机理有助于防治舞动。舞动机理的研究最早是从单自由度系统开始的,随后的研究逐渐转向二自由度、三自由度系统。早期的Den Hartog 舞动机理[1]解释了竖向单自由度系统的舞动现象。竖向单自由度系统因其简单实用,广泛用于许多舞动研究中[2⁃3]。三自由度系统的舞动问题则较为复杂,涉及水平、竖向、扭转三个方向的运动,并且受到系统各向频率、气动阻尼、气动刚度、惯性耦合等多重因素综合影响。
目前的舞动稳定机理研究往往忽略了气动刚度或惯性耦合的作用[4⁃6],但有研究表明,二者均可能对舞动产生显著影响。Yan 等[7]对考虑惯性耦合的三自由度系统进行研究,发现惯性耦合显著改变了系统的舞动稳定性。伍川等[8]采用有限元方法研究导线舞动,结果表明偏心覆冰作用下的导线舞动幅值变大,舞动形态更为复杂。但现有研究均未能解释惯性耦合对舞动的影响机理。楼文娟等[9⁃11]的研究则发现,气动刚度效应能够解释试验中观测到的舞动风速区间,表明气动刚度对舞动稳定判断的重要性。
利用李雅普诺夫一次近似理论,可通过系统特征值实部正负判断舞动稳定性。对于三自由度系统,其特征值一般难以给出准确的解析解。但在舞动问题中,一般认为结构阻尼、气动阻尼、惯性耦合对特征频率影响很小,可以视为小量,从而可采用小参数摄动理论求得近似解析解,即矩阵特征值摄动法[12]。利用该方法,Luongo 等[13]推导了平动二自由度系统特征值的共振解和非共振解,但并未考虑气动刚度和惯性耦合。姜雄等[14⁃15]应用矩阵摄动法推导了三自由度系统覆冰输电导线离散自振频率下特征值实部一阶摄动解,据此分析了舞动机理,但该摄动解并不能反映惯性耦合的影响。
导线防舞装置都是依据已有的舞动机理设计出来的,但由于舞动问题的复杂性,目前对舞动机理的认识并不清晰,防舞装置的应用效果不尽如人意。若能获得更加完备、准确的系统特征值实部解析解,则可对舞动机理有更准确的认识,有助于改进现有防舞器的控制策略,并发展出更加有效的防舞装置。
惯性型防舞器是导线上广泛应用的一类防舞装置,包括双摆防舞器、偏心重锤、失谐摆、压重等[16⁃17]。这类防舞器通过对导线附加惯性质量,改变导线结构特性以抑制舞动。双摆防舞器通过运动方程的Hurwith 稳定性判据来判断舞动稳定状态,但这种数值判据方法缺乏对防舞机理的分析,而实际运行中双摆防舞器在某些气象条件下的控制效果并不好。因此,研究附加惯性质量对于结构舞动稳定性的影响机理具有重要意义。
本文针对具有离散自振频率的三自由度系统,采用修正的矩阵一阶摄动解方法推导了同时考虑惯性耦合及气动刚度的特征值实部修正解。以某D 形覆冰六分裂导线为例,验证该修正解的准确性。基于该修正解,分析附加质量对舞动稳定性影响的机理,并对输电线路常用的双摆防舞器的控制效果及适用性进行检验。
1 含附加质量的导线三自由度系统运动方程
取一段含附加质量的导线微元,长度为ds,简化的三自由度模型如图1所示。设导线自身的弹性中心与质量中心重合,记为O点,m,J分别为单位长度导线质量、转动惯量;设共有np个附加质量,mpi,Jpi分别为第i个附加质量的单位长度质量及其转动惯量,Rpi,αpi分别为附加质量中心与中心O的连线距离、连线的偏心角;R为截面等效半径,水平来流风速大小为U;ky,kz,kθ分别为单位长度竖向、水平向和扭转向刚度;记位移向量为U=[v,w,θ]T,v,w,θ分别为竖向、水平向、扭转向位移。
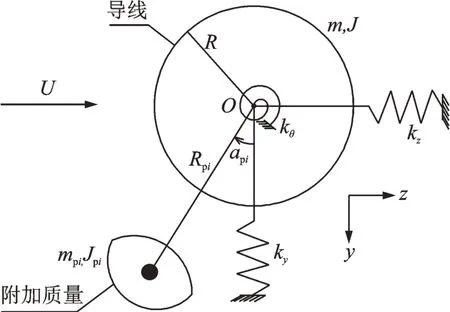
图1 含附加质量的导线三自由度模型Fig.1 3-DOF conductor model with additional mass
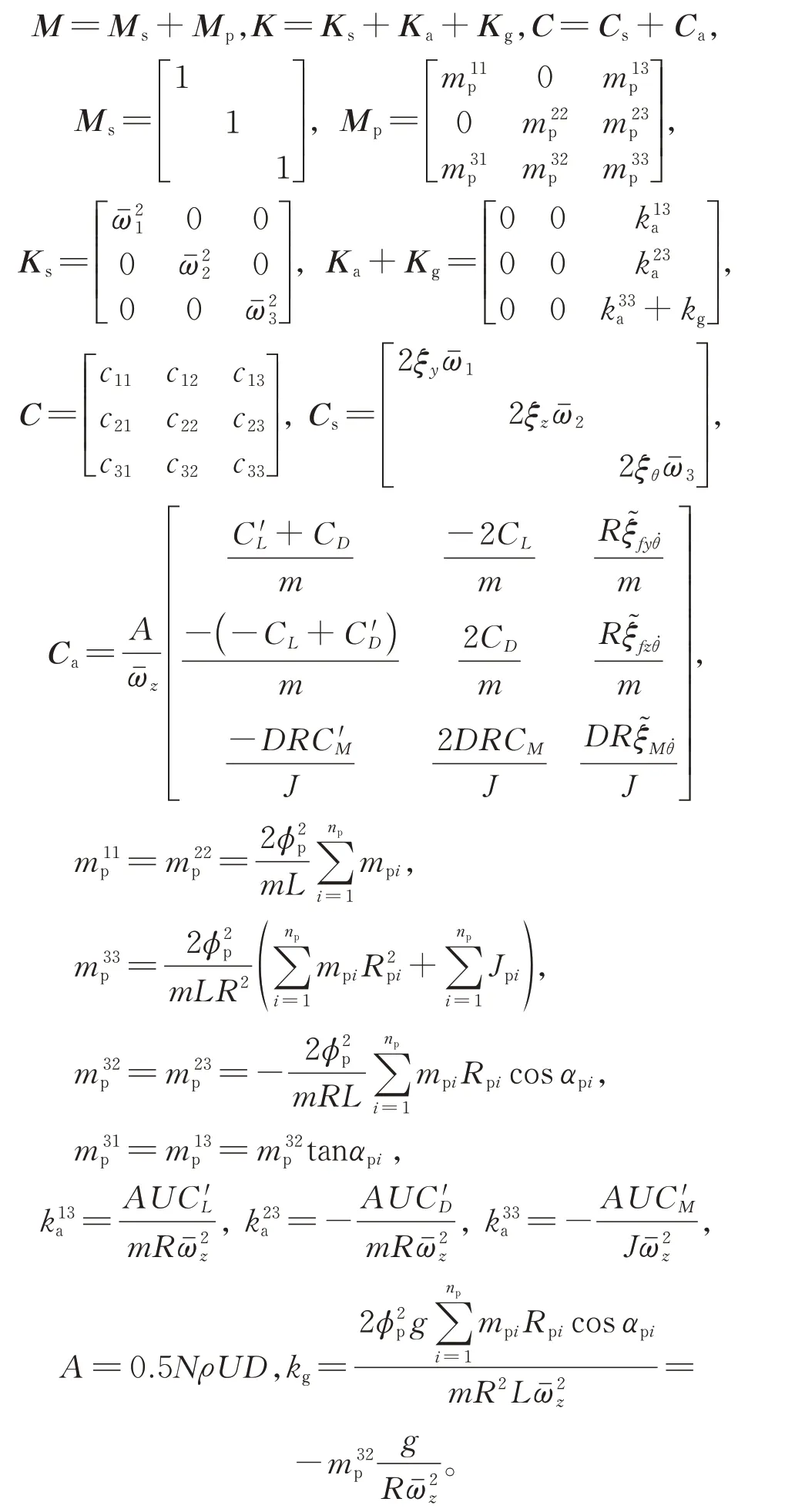
对非线性风荷载Fw关于结构速度、位移项进行泰勒展开并保留一阶项,去除平均风荷载后,运用拉格朗日第二运动方程,并作无量纲和归一化处理[9],可求得系统运动方程:


式中s为导线微元沿导线轴向的坐标;sp为附加质量沿导线轴向的坐标;δ为狄拉克函数分别为原系统、附加质量的质量矩阵;分别为结构阻尼、气动阻尼的矩阵;分别为结构刚度、气动刚度、附加质量重力刚度的矩阵。
以上为针对导线微元建立的运动方程,对于整档导线这样的连续系统,采用假设模态法,令:

式中 假设第j阶振型为ϕj=sin(jπs/L),n为振型数量,L为导线档距,qvj,qwj,qθj分别为竖向、水平、扭转广义位移。
对式(1)乘以ϕj并沿导线轴向积分可得:

式中各项的表达式为:
ϕp为附加质量位置的振型位移;;g为重力加速度;ξy,ξz,ξθ分别为竖向、水平、扭转向模态阻尼比;N为导线分裂数;ρ为空气密度;D为导线直径;CL,CD,CM分别为初始风攻角α0时导线整体的升力、阻力和扭矩系数;C′L,C′D,C′M为前述系数关于风攻角导数。
对于单导线,Ca矩阵第三列相关项表达式为:

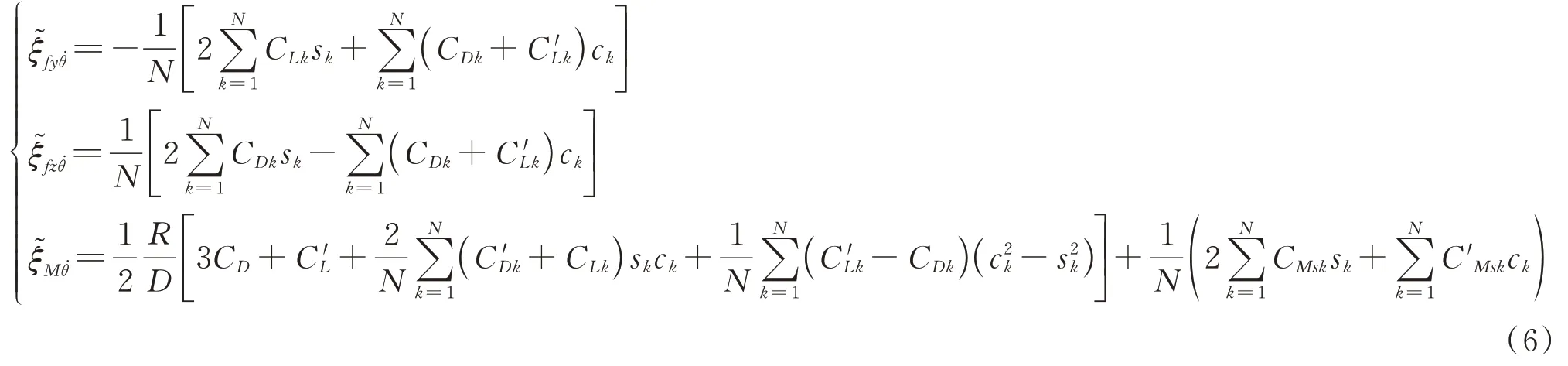
对于分裂数为N的多分裂导线,记sk=sin(α0+αck),ck=cos(α0+αck),αck为第k根子导线在多分裂导线截面的方位角。参考郭应龙等[16]给出的表达式,Ca矩阵第三列相关项表达式为:式中CLk,CDk,CMsk分别为第k根子导线的升力、阻力和扭矩系数;C′Lk,C′Dk,C′Msk为前述系数关于风攻角的导数。
2 三自由度系统特征值实部修正摄动解
通过矩阵一阶摄动法推得的特征值实部能够体现气动阻尼、气动刚度的贡献[14],但无法体现惯性耦合的贡献。通过矩阵二阶摄动法[12]得到的特征值实部理论上能反映惯性耦合的作用,但二阶摄动法的计算较为复杂,难以获得实用的表达式。在文献[9]的基础上,本文提出一种修正的摄动解方法,使得一阶摄动的特征值实部能反映惯性耦合的作用。
根据特征值摄动理论,当结构参数发生微小变化时,结构参数可描述为零阶项(初始值)与一阶项(变化值)之和。按照文献[9]的取法,式(4)中系统质量、刚度、阻尼的矩阵分别表示为:零阶项:

一阶项:

式中 ε 为小参数。
式(4)的特征方程满足:
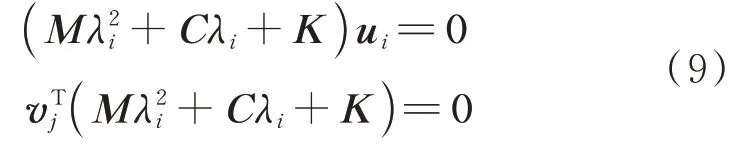
式中λi为第i个特征值,可表示为按ε展开的幂级数:

根据矩阵摄动法,λi的一阶摄动解为[9]:

式中vi,0,ui,0为左、右特征向量;记结合竖向零阶特征值λ1,0=i 由式(11)可得竖向一阶特征值的实部、虚部分别为:
可见附加质量对竖向一阶特征值的影响仅体现在其虚部中,而在实部未有体现,即,竖向一阶特征值无法反映附加质量对系统稳定性的影响。
下面采用修正的矩阵一阶摄动解方法求特征值实部。将εM1视为零阶质量矩阵的一部分,得修正的零阶质量矩阵为:

在此基础上,通过小参数展开法求解零阶矩阵的特征方程,并忽略高阶小量,得修正的零阶特征值为:

通过可求得修正的零阶左、右特征向量为:
根据特征向量的正交关系,有[15]:

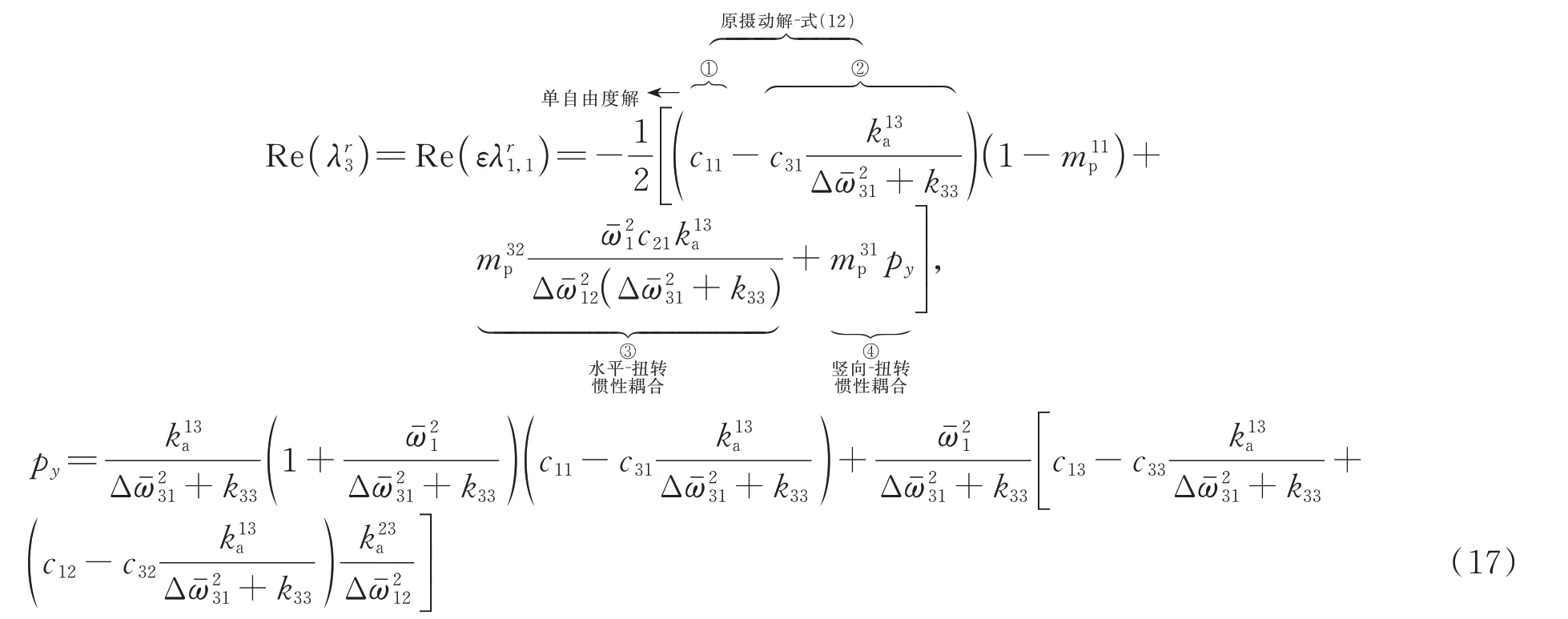
式中 项①对应的-c11/2 项即单自由度系统的特征值实部[9],项①+②对应原摄动解的表达式(12)[9];修正摄动解Re()是在原摄动解Re(λ1)的基础上,新增了惯性耦合相关的附加项③和④,并且项③和④同时还包含气动阻尼、气功刚度,可见惯性耦合作用是与气动力系数密切相关的;附加平动质量m11p与项①+②相乘,其作用在于缩放了原摄动解的数值。此外,假如视附加质量为一阶小量,则项③和④均为二阶小量,这也解释了式(12)的特征值实部解为何只包含气动阻尼项,而不含附加质量项,因为附加质量项仅出现在被舍去的二阶小量中。
同上,可得水平向特征值实部为:
pz的表达式可由py中各角标1 全部置换为2 得到,便不在此给出。
扭转向特征值实部也可通过上述方法得到,但由于扭转向与两个平动方向均存在耦合,推导过程较为复杂,这里采用一种简便方法。记矩阵A为:

式中 I 为单位矩阵。给出以下3 个条件:1)本文所求特征值等价为矩阵A的特征值[15];2)矩阵A所有特征值之和等于矩阵的迹tr(A);3)特征方程的复数根成对出现且互为共轭复数。根据这些条件,扭转向特征值实部可表示为:

由式(17),(18)和(20)可知,特征值实部中涉及多个惯性耦合相关项,表达式较为复杂,这表明惯性耦合大大增加了舞动稳定问题的复杂性。但是可以注意到,与包含有正弦、余弦项,意味着当附加质量位于原系统水平中心线或竖向中心线上,竖向或水平向的特征值可以得到简化,这能为舞动稳定性判断提供相对简单的依据。
3 修正摄动解的验证
3.1 算例参数
如图2所示,以D 形覆冰六分裂导线为例进行算例分析。导线气动力参数参见文献[18],结构参数见表1。需要说明的是,对于多分裂导线,覆冰一般在截面圆周的各子导线上都有分布,且子导线分裂半径远大于覆冰厚度,故在非重覆冰情况下惯性耦合效应较为微弱。而惯性型防舞器的质量一般集中在导线圆截面上某一侧,惯性耦合效应较强。因此可以认为覆冰的惯性耦合效应相比于防舞器可以忽略。另外,假设导线为单一模态振动,附加质量设在导线跨中,则ϕp=1。定义附加质量的质量比为:
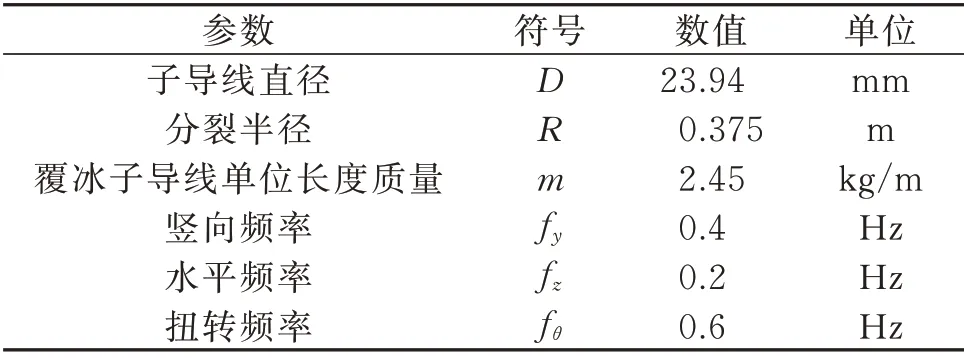
表1 D 形覆冰六分裂导线参数Tab.1 Parameters of the 6-bundled conductor with D-shaped icing


图2 D 形覆冰六分裂导线Fig.2 6-bundled conductor with D-shaped icing
在单自由度系统的假设下,式(6)的对应扭转向气动阻尼。易知若各子导线的气动力⁃风攻角曲线相同,中正余弦相关项为零,此时满足3CD+C′L的形式。与Den Hartog 系数CD+C′L比较易知,3CD+C′L<0的风攻角范围显著小于CD+C′L<0的风攻角范围。一般情况下各子导线气动力曲线之间差异不会很大,因此可认为多分裂导线的竖向激发舞动占主导情况,扭转向激发舞动较少发生。由图3可知,对于该D 形覆冰六分裂导线,CD+C′L<0 的范围主要为67°~79°,138°~180°,而在全风攻角范围内大于0。因此对于该多分裂导线,只需重点关注其竖向激发的舞动。
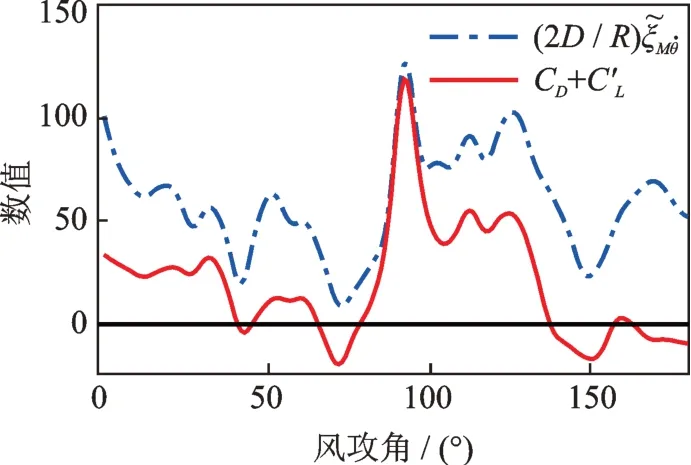
图3 气动力相关参数曲线Fig.3 Aerodynamic coefficients
3.2 验 证
下面以单个附加质量为例,默认取质量比为0.1,偏心角为30o,特征值实部修正摄动解与数值解的比较如图4(a)所示。由图可知,三个方向的修正摄动解总体上与数值解吻合良好,在高风速下开始逐渐偏离。图4(b)对竖向特征值实部的数值解、单自由度解、原摄动解Re(λ1)、修正摄动解Re()进行比较。其中单自由度解指的单自由度系统运动方程的特征值实部[9],与传统的Den Hartog 舞动机理是一致的。如图4(b)所示,单自由度解在8 m/s 风速左右开始显著偏离数值解,摄动解在13 m/s 左右显著偏离数值解,而修正摄动解在20 m/s 以内都吻合良好。需要说明的是,在不同气动力条件下,各近似解与数值解的误差情况均不相同。由式(17)可知,误差取决于表达式中附加项的大小。这些附加项在推导过程中被视为小量,但若高风速下气动负刚度过于显著而使分母接近零,则误差会明显增大。
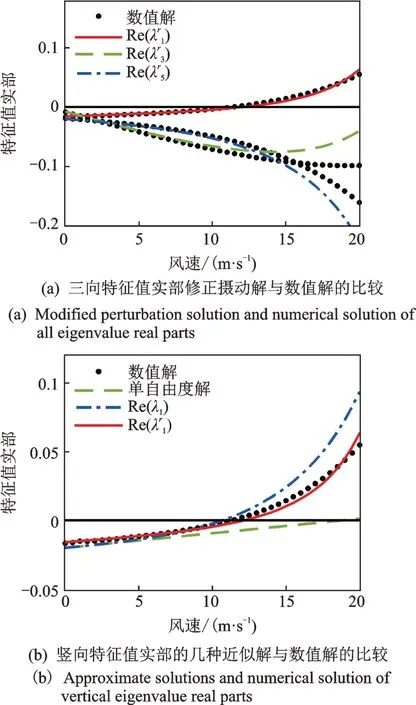
图4 特征值近似解与数值解的比较(风攻角76o)Fig.4 Approximate solutions and numerical solution of eigen value real parts(76°attack angle)
图5给出了0°~180°风攻角下竖向特征值实部数值解、原摄动解Re(λ1)、修正摄动解Re()的比较。如图5所示,在大部分风攻角区域,修正摄动解的精度均显著高于摄动解。而在某些风攻角下,两种摄动解与数值解均较为接近,这表明惯性耦合的影响在该风速下并不显著。由于惯性耦合项与气动刚度、气动阻尼参数是密切相关的,因此惯性耦合能发挥多大的作用与具体的气动力参数相关。

图5 竖向特征值实部随风攻角的变化(风速20 m/s)Fig.5 Variation of vertical eigenvalue real part with attack angle(U=20 m/s)
4 附加质量的防舞机理分析
4.1 附加质量对系统稳定性的影响
如式(17)所示,考虑惯性耦合的摄动解表达式很复杂,涉及多个气动刚度项、气动阻尼项,因此难以直接利用式(17)对导线舞动稳定性进行分析。但自然界中有一些覆冰是形成于导线的正下方,而一些常用的导线防舞装置的质心也是位于导线的正下方,如失谐摆、双摆防舞器等。在这种情况下,式(17)中m31p=0,竖向⁃扭转的惯性耦合作用消失,则特征值实部表达式得以大大简化,为舞动稳定分析提供方便。
取m31p=0,附加质量后与原系统的的特征值实部之差为:

式中i=1,2,…,np。注意上式中m11p相关项已经被忽略,因为在舞动临界风速附近,与m11p相乘的阻尼项接近0,对临界风速影响很小。由式(22)可知,附加质量前后,特征值实部改变量主要由两项组成:含m32p的惯性耦合项、含kg的重力刚度项。将m32p,kg表达式代入式(22),则式(22)可等价表达为:

由式(23)可知,惯性耦合、重力刚度这两项均存在与气动力参数的耦合,包括C′L,C′M,CL-C′D等。因此可以推断附加质量对系统舞动稳定性的影响强烈依赖于具体的气动力条件。此外,惯性耦合、重力刚度项均与k13a这个气动刚度项相乘,可以推断这两项在高风速下可能会发挥显著作用。
式(22)和(23)表明,在附加质量引起的惯性耦合与重力刚度作用下,系统的特征值实部可能发生显著改变,从而引起系统舞动稳定状态的变化。利用这一特性,可以使用附加质量对导线结构的舞动进行抑制。
4.2 双摆防舞器控制效果
双摆防舞器是目前在多分裂导线上应用广泛的防舞装置,其通过提高导线的动力稳定性以实现防舞的效果。双摆防舞器的简化结构如图6所示,两个摆锤质量相等,沿竖向中心线对称布置。该装置的设计优化一般针对少数特定的风攻角进行,若选取合适的防舞器参数,则可以有效控制线路舞动。但从工程应用经验来看,若实际冰风条件超过设计范围,则线路仍可能发生舞动,这与双摆防舞器防舞机理不够明确有一定关系。本文将从特征值实部正负的角度对双摆防舞器的防舞机理与控制效果进行分析。
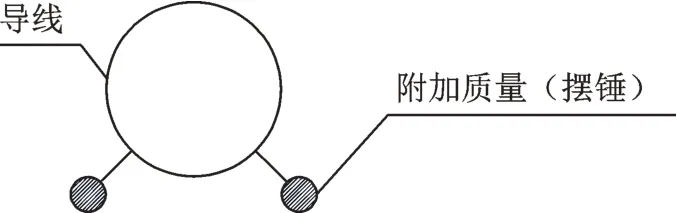
图6 双摆防舞器简化示意图Fig.6 Schematic of double pendulum anti-galloping device
以文中D 形覆冰六分裂导线为例对双摆防舞器的控制效果进行计算。设定风攻角为76o,防舞器的质量比为0.1,以舞动临界风速为优化目标对偏心角αp、摆长Rp参数进行优化,优化后偏心角定为30o,摆长为700 mm。相关计算结果见图7和8 。
如图7(a)所示,76o风攻角下,附加质量后竖向特征值实部在风速大于10 m/s 的区间显著下降,临界风速从8.5 m/s 提升为15.5 m/s。图7(b)给出式(23)中重力刚度项与惯性耦合项的曲线,可以发现二者均为负数,大小处于同一量级,并且数值在10 m/s 风速以上变得显著。因此式(23)的重力刚度项与惯性耦合项可以用来解释附加质量后系统特征值实部显著下降的现象。
采用Newmark⁃β 法计算该三自由度导线结构响应时程,如图7(c)和(d)所示,在13 m/s 风速下,未受控结构在约90 s 时进入稳定舞动状态,而受控结构并不舞动。可见附加的质量使得系统特征值实部由正变为负,从而使结构从原先的舞动状态转变为气动稳定状态,有效抑制了舞动。

图7 在76°风攻角下结构受控前后变化Fig.7 Comparison of controlled and uncontrolled structure at 76°attack angle
附加质量对于舞动的控制效果实际上取决于具体的气动力参数。保持原76o风攻角下设计的双摆防舞器参数不变,对167o风攻角下的控制效果进行计算。如图8(a)所示,原结构的特征值实部曲线始终小于0,而附加质量后,受控结构的特征值实部在高风速区域显著抬升并且由负变正,临界风速为10.1 m/s。图8(b)表明,重力刚度项、惯性耦合项的曲线数值均大于0。因此对于同样的双摆防舞器参数,当风攻角从67o变为167o时,式(23)的C′L,C′M,CL-C′D等气动力参数发生相应改变,重力刚度项、惯性耦合项起到了增大特征值实部的作用,使结构趋向于气动失稳。
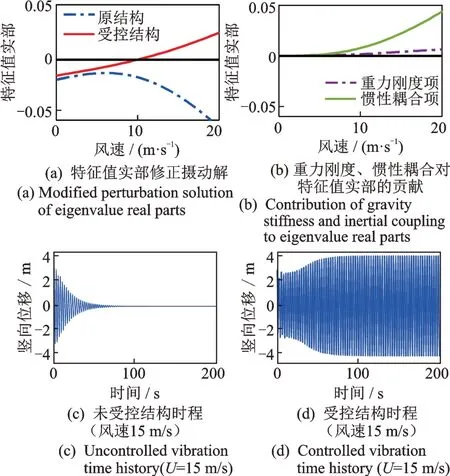
图8 在167°风攻角下结构受控前后变化Fig.8 Comparison of controlled and uncontrolled structure at 167°oattack angle
由图8(c)和(d)结构位移时程可知,在15 m/s风速下,未受控结构并未发生舞动,而受控结构发生了大幅度舞动。可见在167o风攻角下,所施加的双摆防舞器能够使导线结构从原先的稳定状态转变为舞动激发状态,这与特征值实部计算结果一致。
综上所述,借助惯性耦合、重力刚度的作用,针对某风攻角优化设计的双摆防舞器能够在该条件下有效地抑制舞动。但若风攻角及其气动力条件发生改变,双摆防舞器可能失去效果,甚至使原本稳定的结构发生舞动。
5 结 论
本文针对具有离散自振频率的三自由度系统,采用修正的矩阵一阶摄动解方法推导了考虑惯性耦合及气动刚度的特征值实部修正解。以某D 形覆冰六分裂导线为例,通过与数值解对比以验证该修正解的准确性。基于该修正解,分析了附加质量对舞动稳定性影响的机理,并对输电线路常用的双摆防舞器的控制效果进行计算。结论如下:
1)该修正解相较于原摄动解,附加了水平⁃竖向、竖向⁃扭转这两种惯性耦合项,且惯性耦合作用与气动力参数密切相关。与数值解的对比表明,该修正解能够较准确地反映附加质量对系统稳定性的影响。
2)考虑惯性耦合时系统稳定性判断式较为复杂,但当附加质量关于导线竖向中心线对称时,仅需考虑水平⁃扭转惯性耦合作用,竖向特征值实部的表达式大为简化,可用于舞动稳定分析。
3)对修正解的分析表明,附加质量主要通过重力刚度、惯性耦合影响系统的稳定性,这种影响与具体的气动力参数相关。通过该修正解可以分析导线舞动与惯性质量防舞的机理,为防舞器设计优化提供指导。
4)对双摆防舞器的计算表明,针对某风攻角优化设计的防舞器能有效抑制舞动;但若风攻角及气动力条件发生改变,则防舞器可能丧失控制效果,甚至使原本气动稳定的线路发生舞动。
