基于RSC反馈线性化的含SVG双馈风机系统次同步振荡抑制*
2022-08-31薛静玮唐雨晨王永杰薛安成
薛静玮, 林 毅, 唐雨晨, 魏 鑫, 王永杰, 薛安成
(1.国网福建省电力有限公司 经济技术研究院,福建 福州 350012;2.华北电力大学 新能源电力系统国家重点实验室,北京 102206)
0 引 言
大力发展风能等新能源发电,实现能源供应转型,已成为国内外应对能源问题的共识[1]。然而,随着高比例风电的接入,电力系统出现了新型次同步振荡[2],亟需抑制。目前,从控制方法的角度,对含风电的电力系统次同步振荡抑制措施,可以分为附加阻尼控制、优化系统控制以及增设辅助设备三类。
在附加阻尼控制方面,从控制接入的位置看,现有研究大多借助变流器环节实现控制。文献[3-4]通过在双馈风机(DFIG)转子侧变流器(RSC)引入阻尼控制实现次同步振荡抑制。文献[5-6]分别提出了DFIG和直驱风机的电网侧变流器(GSC)附加阻尼控制方法。文献[7]对比了分别在DFIG的RSC与GSC中采用附加阻尼控制时对系统中次同步振荡的抑制效果。而从选取的控制信号看,又可分为转速信号[8]和电流/电压信号[9]。在优化系统控制方面,文献[10-11]针对风电场经柔直送出系统进行了参数优化,进而抑制次同步控制相互作用(SSCI)。在增设辅助设备方面,目前大多基于柔性交流输电系统(FACTS)或其他装置,如通过统一潮流控制器[12]、静止同步串联补偿[13]和电力系统稳定器[14-15]实现振荡抑制。
另一方面,从数学的角度看,对于风电次同步振荡抑制的研究对象,主要是负阻尼振荡和光滑的强迫振荡[16]。其中,针对负阻尼振荡的抑制措施[17-19]主要通过抵偿控制器中的扰动信号或整定控制参数,进而改善系统平衡点的阻尼,实现对振荡的抑制。而针对光滑的强迫振荡的抑制措施[20-21]主要通过准确定位并切除扰动源,从而增强系统稳定性。上述研究通过判断局部平衡点的稳定性,针对小扰动下的振荡抑制效果进行了验证。然而在大扰动下,风机内部如限幅等非线性切换环节作用,会使得系统出现与以往不同的切换型振荡[22-23],目前对该类振荡的抑制鲜见报道。
此外,非线性控制中,通过恰当的坐标变换和状态反馈,将系统化为线性系统,从而利用线性控制实现镇定,称之为反馈线性化控制(FLC)。与传统控制方法相比,FLC可在一个足够大的状态空间中,对非线性系统实现解耦控制,更加适合强非线性强耦合的含静止无功发生器(SVG)双馈系统。然而,现有FLC研究中,较少考虑SVG对系统控制的影响,主要集中于不含SVG的双馈/直驱风机系统[24-25]。
有鉴于此,本文以含SVG的DFIG系统为研究对象,结合反馈线性化原理,提出了一种针对DFIG RSC的控制方法。首先,推导了含SVG的双馈系统22阶时域模型,并针对转子侧变流器内环进行反馈线性化控制。其次采用特征值法和时域仿真,验证了控制方法在小扰动下的优越性。最后,结合二维相图截面分析了控制方法在大扰动下的有效性。
1 含SVG的DFIG系统时域模型
含SVG的DFIG系统结构如图1所示。大功率DFIG经箱式变压器接入汇流母线,同时,系统中配备有经变压器接入的SVG提供无功支撑。整个风电并网单元经升压变压器和110 kV串补输电线路接入外部电网。下面推导各部分时域状态空间模型。
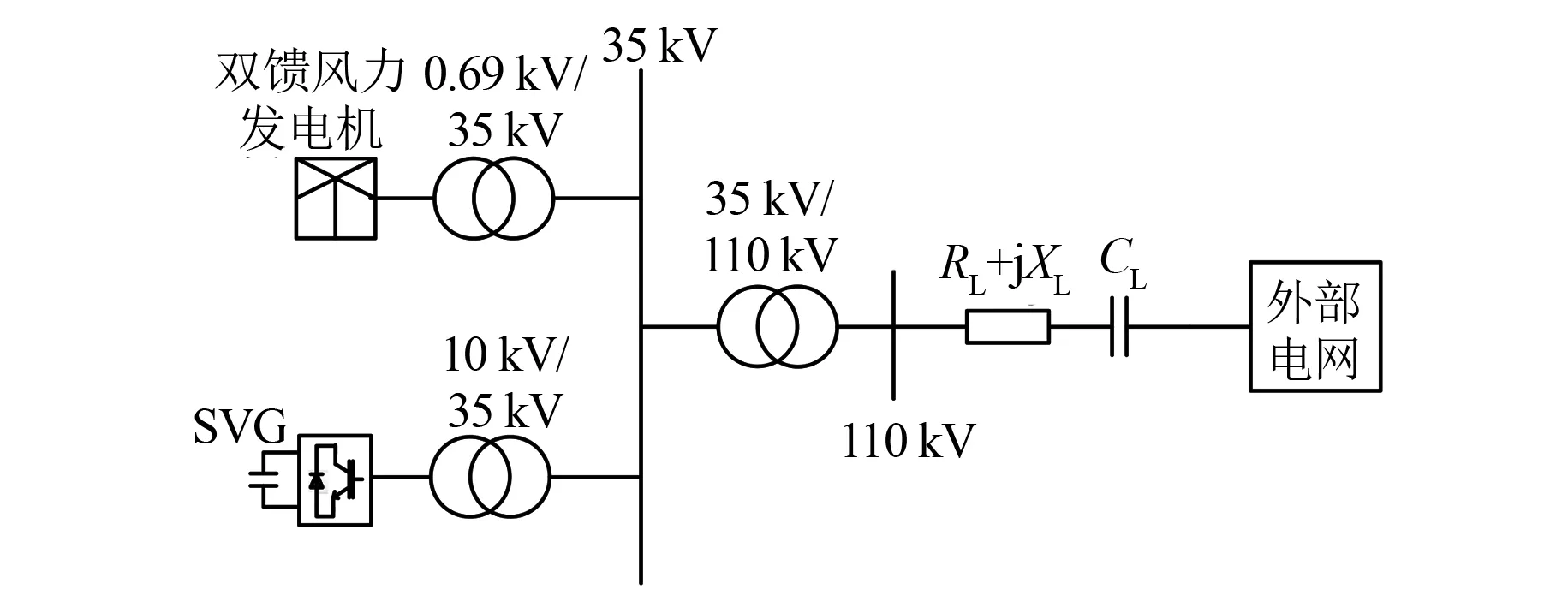
图1 含SVG的双馈风电系统结构图
1.1 DFIG时域模型
DFIG模型主要包括传动轴、异步发电机、换流器以及外部电路组成。DFIG的机械传动部分采用两质量块模型,如图2所示,即将DFIG的机械部分等效为一个质量块,异步发电机部分等效为另一质量块,二者之间通过传动轴连接。
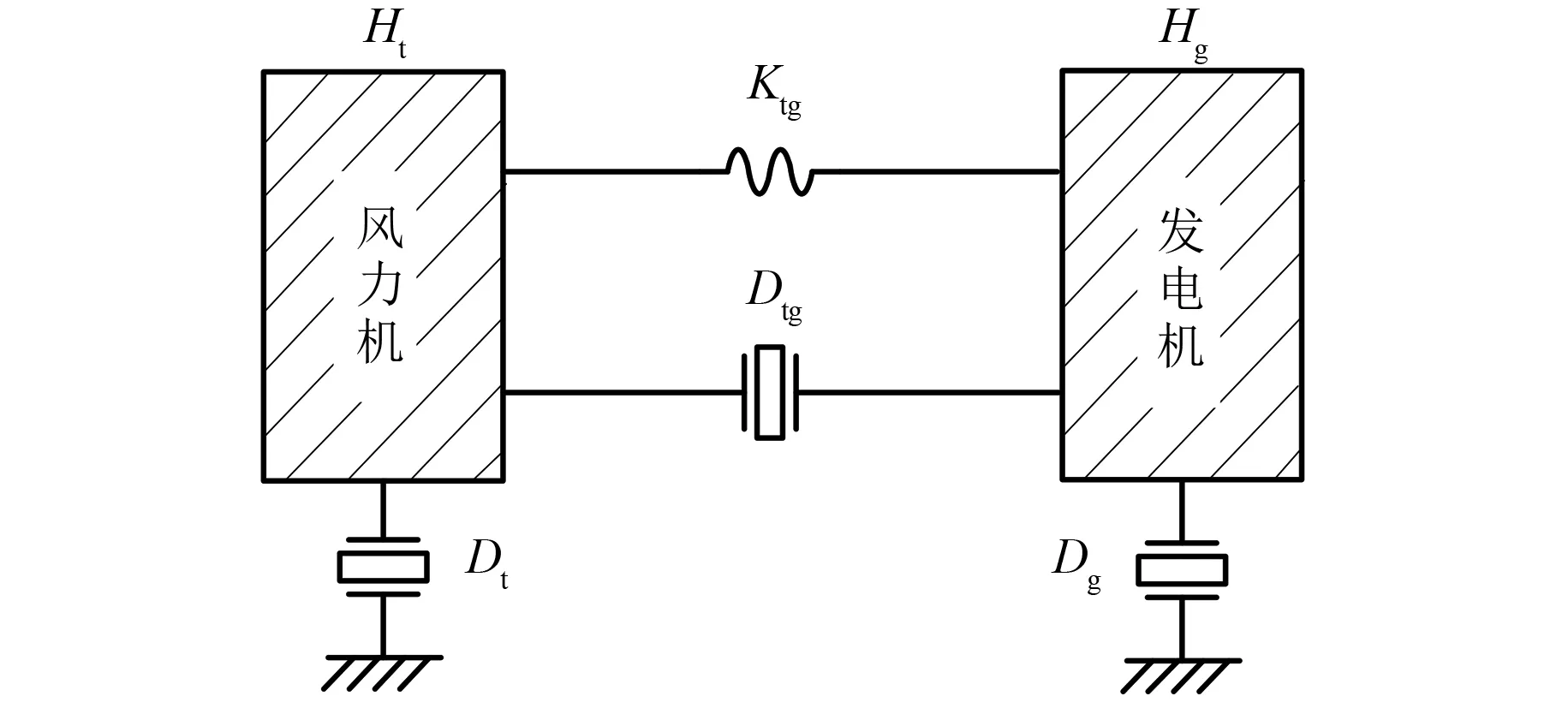
图2 DFIG两质量块等效模型示意图
该部分的微分方程可表示为
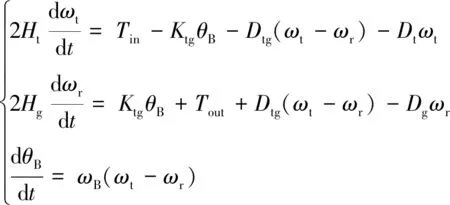
(1)
式中:Ht、Hg分别为风力机机械部分质量块和异步发电机质量块的惯性系数;ωt、ωr分别为风力机机械部分和异步发电机发电机转子的角速度;Dt、Dg分别为两质量块的自阻尼系数;Dtg、Ktg分别为两质量块间的互阻尼系数和刚性系数;θB为等效风力机和发电机转子间的夹角;Tin、Tout分别为风力机输入机械转矩和发电机输出电磁转矩;ωB=2πf为系统同步角速度。
异步发电机部分可通过dq坐标系中的发电机磁链方程与电压方程表示为
式中:ψsd、ψsq、ψrd、ψrq分别为定/转子磁链的d、q轴分量;Ls、Lr分别为定/转子自感抗;Lm为互感抗;Rs、Rr分别为定/转子电阻;isd、isq、ird、irq分别为定/转子电流的d、q轴分量;usd、usq、urd、urq分别为定/转子电压的d、q轴分量;ω1为定子角速度。
本文中,DFIG的功率解耦控制主要通过转子侧变流器实现,并忽略直流母线电压的动态过程,即忽略电网侧变流器的控制作用。同时考虑内环电压限幅,忽略脉冲宽度调制(PWM)。转子侧变流器控制框图如图3所示。
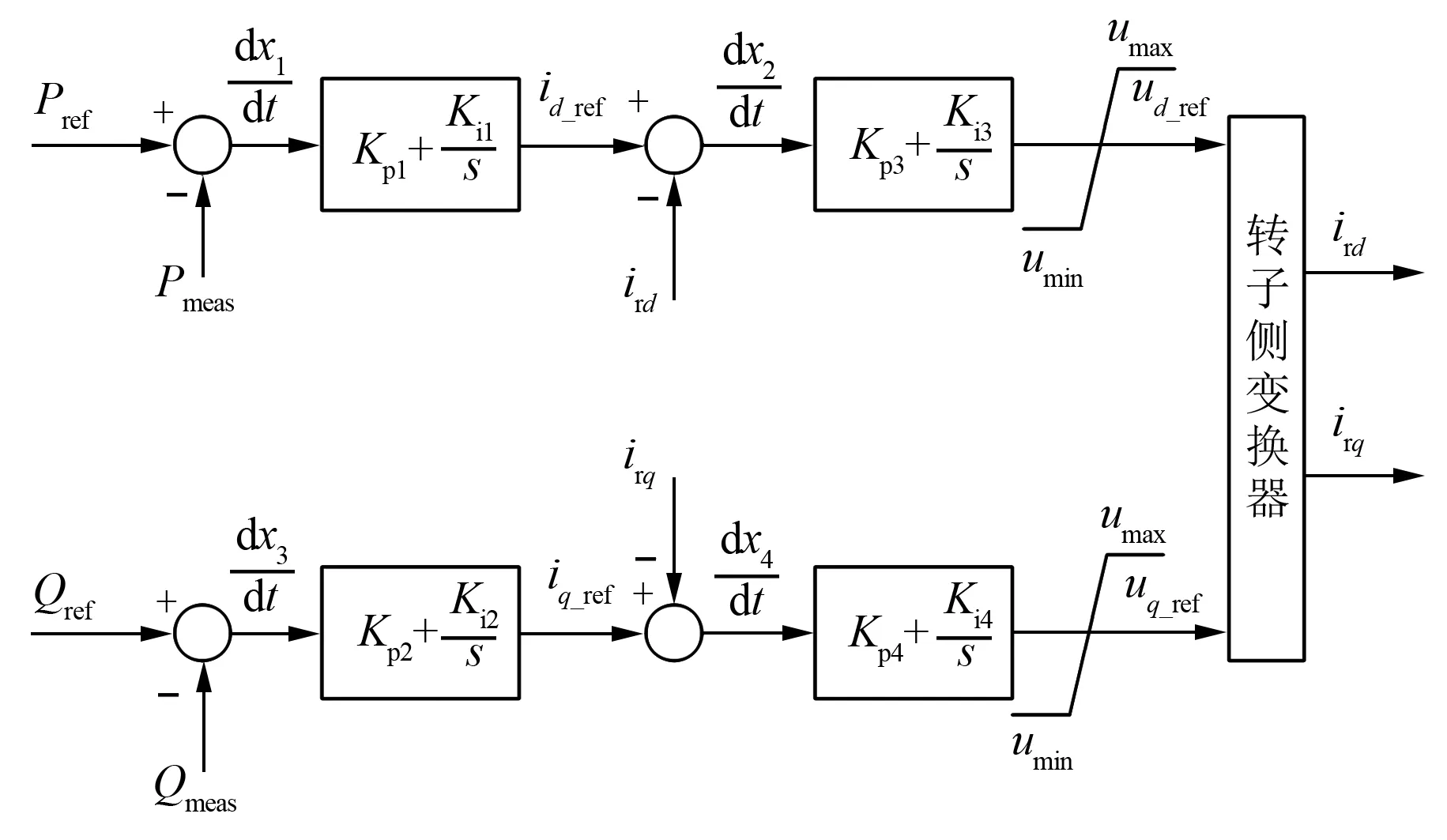
图3 转子侧变流器控制示意图
由控制框图3可得其状态方程为
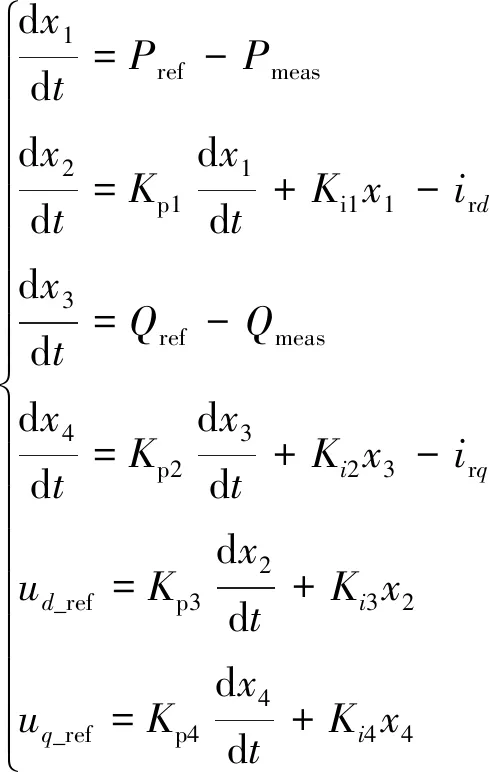
(4)
式中:x1、x2、x3、x4为中间变量;Pref和Qref分别为有功和无功功率的参考值;Pmeas和Qmeas分别为有功和无功功率的测量值;ud_ref、uq_ref分别为RSCd、q轴电压参考值;Kp1、Kp2分别为RSCd、q轴外环比例系数;Kp3、Kp4分别为RSCd、q轴内环比例系数;Ki1、Ki2分别为RSCd、q轴外环积分系数;Ki3、Ki4分别为RSCd、q轴内环积分系数。
DFIG外部电路结构如图4所示,采用典型的RLC串联结构,外部电网等值为电压幅值不变的无穷大节点,变压器和送出线合并考虑,采用电磁暂态模型。

图4 DFIG外部电路结构图
根据各元件间的电气关系,可得外部电路结构在dq坐标系下的数学模型:

(5)
式中:ucd、ucq为串补电容两端电压的d、q轴分量;id、iq为系统输出电流的d、q轴分量;ugd、ugq为外部电网电压的d、q轴分量;CL、XL、RL分别为线路电容、电感、电阻。
1.2 SVG时域模型
SVG可等效为幅值和相位可控的电压源,在不同情况下,起到发出或吸收无功的作用。其中,SVG的一次回路经变压器接入三相电网。同时从直流电容采集直流电压,从变压器低压侧采集交流电压,以实现d、q轴的解耦控制,具体结构如图5所示。
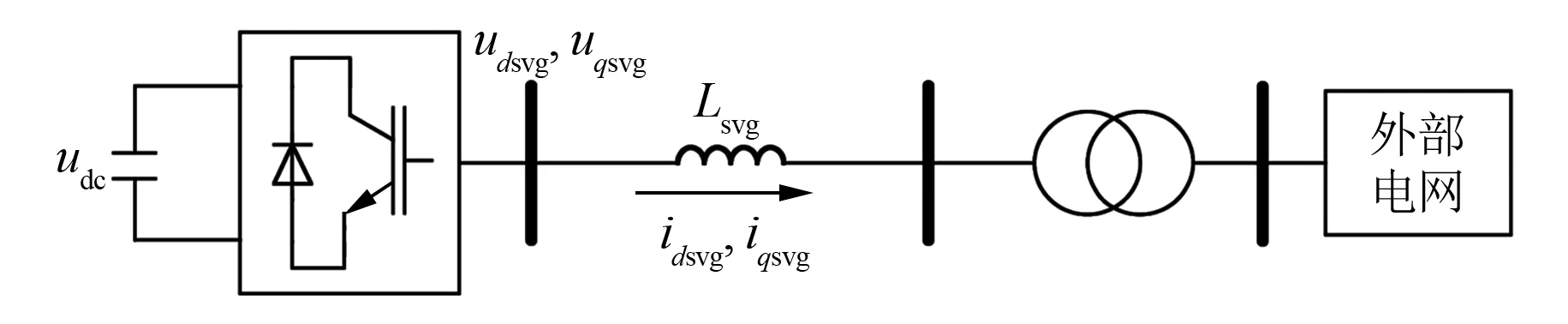
图5 SVG外部电路结构图
其在dq坐标系下的状态方程可表示为
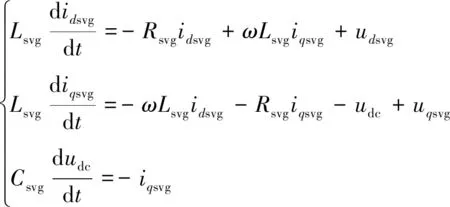
(6)
式中:Lsvg、Rsvg、Csvg分别为SVG的滤波电感、输出线路电阻、直流电容;idsvg、iqsvg和udsvg、uqsvg分别为SVG输出的d、q轴电流分量和电压分量;udc为直流电容电压。
SVG采用定电压控制方式,即用直流电压调制d轴电流信号,以控制有功功率,稳定直流电容电压;用交流电压调制q轴电流信号,以控制无功功率,稳定并网点电压,调整功率因数,SVG控制环节结构图如图6所示。
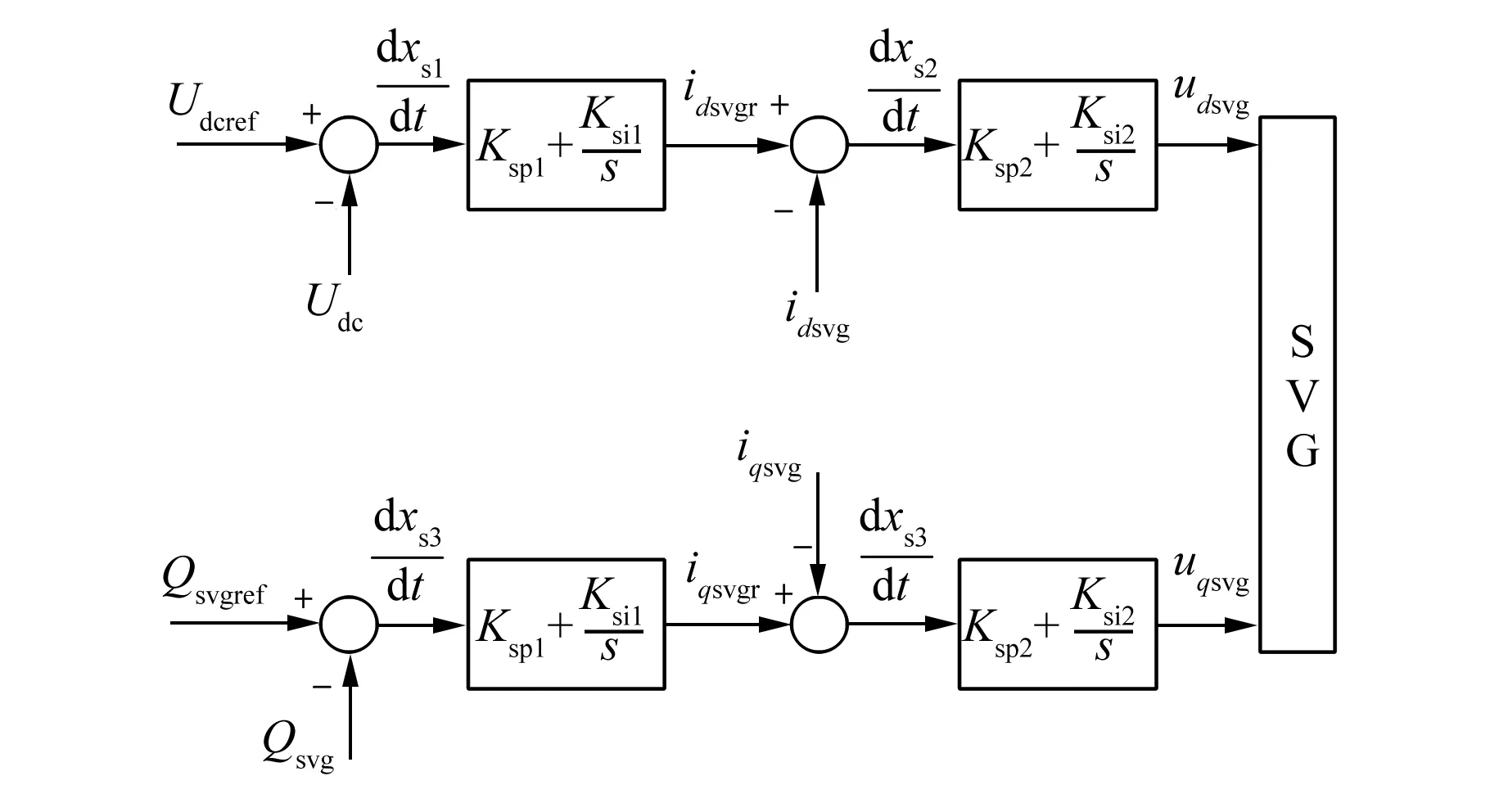
图6 SVG控制环节结构图
由图6可知,SVG控制环节的状态方程为

(7)
式中:udcref为SVG直流电容电压参考值;xs1、xs2、xs3、xs4为SVG控制器模型的中间变量;Ksp1为SVGd轴外环比例系数;Ksi1为SVGd轴外环积分系数;Qsvgref为SVG输出无功率参考值;Qsvg为SVG输出的无功功率。
2 系统小信号稳定性分析
联立式(1)~式(7),可得含SVG的双馈发电系统的22阶状态空间模型:
(8)
式中:系统的状态变量x=[ωt,ωr,θB,isd,isq,ird,irq,x1,x2,x3,x4,ucd,ucq,id,iq,idsvg,iqsvg,udc,xs1,xs2,xs3,xs4]T;系统的代数变量u=[usd,usq,urd,urq]T;A、B分别为状态和代数变量系数矩阵。
利用MATLAB可得系统特征值,其6组振荡模式如表1所示。

表1 系统振荡模式及其特征值
当系统串补度为60%时,双馈系统含有5对共轭特征值。其中,系统次同步振荡模式对应的特征值λ5,6=2.54±j223.67,由特征值虚部可知,系统发生频率为35.60 Hz的次同步振荡。当系统串补度为60%时,在小扰动下,输出的有功功率波形图及频谱分析如图7和图8所示。图8表明,系统的输出有功功率中含有36.36 Hz的次同步振荡分量,与特征值分析结果一致。
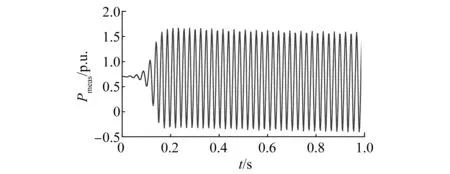
图7 系统输出有功功率波形图
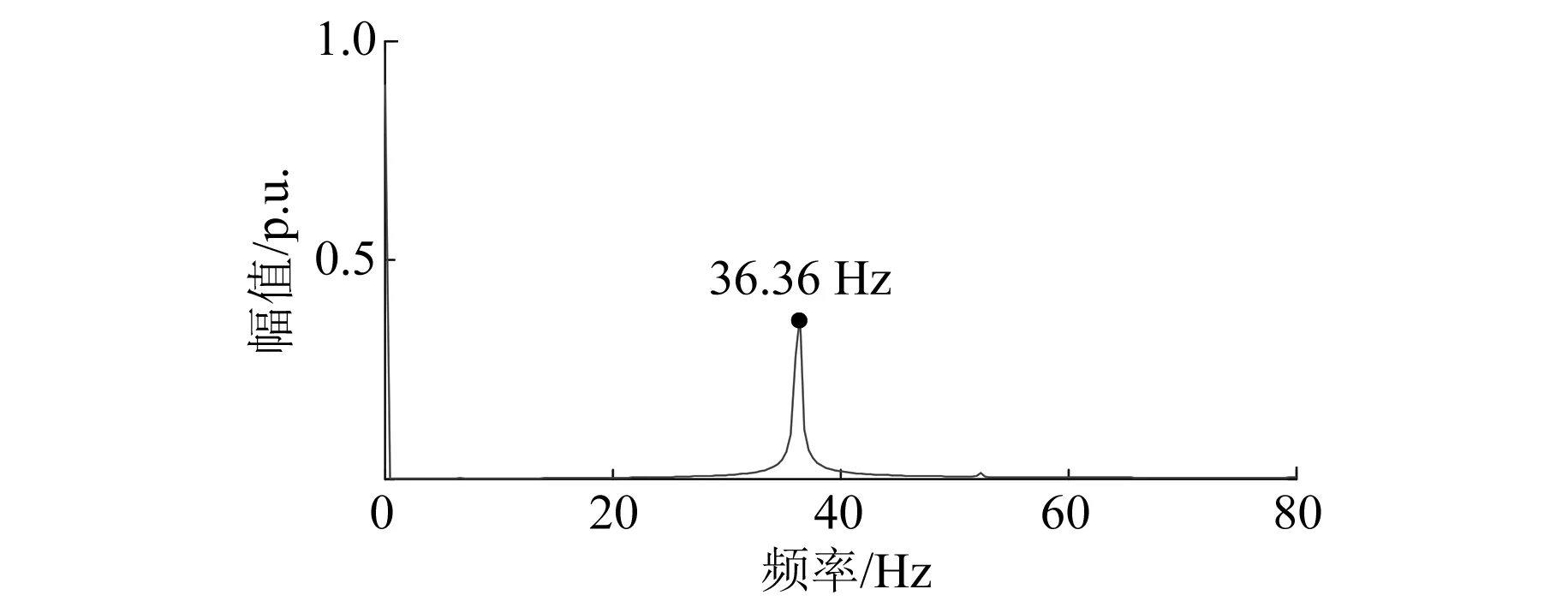
图8 有功功率频谱分析图
参与因子可确定该振荡模式下的主要参与变量,如表2所示。表2表明,该振荡模式主要由RSC内环控制环节(x2,x4)、串联补偿输电线路(id,iq)以及SVG的内环控制环节(xs2,xs4)参与。其中,RSC内环控制环节影响程度最大,因此考虑对RSC内环进行反馈线性化控制。

表2 振荡主要参与变量及其参与因子
3 反馈线性化控制设计
3.1 反馈线性化方法简介
反馈线性化主要设计方法[26]简述如下。
仿射非线性系统如下所示:

(9)
式中:x为系统的状态量;u、y分别为系统的控制和输出向量;f(x)、g(x)和h(x)为相应的函数表达式。
当输出函数h(x)对系统的相对阶r小于或等于系统的阶数(即系统状态量的个数)时,存在一坐标变换z=φ(x),可将仿射非线性系统转化为以下标准形式:

(10)
式中:z、v分别为新的状态向量和控制向量;A、B为相应的常系数矩阵。
3.2 转子侧变流器的反馈线性化控制
RSC是利用转子电流的dq分量,解耦控制风机输出的有功功率和无功功率。因此,选取ird、irq作为状态变量,Pmeas-Pref、Qmeas-Qref作为输出变量,推导转子侧变流器的仿射非线性模型。
考虑定子电压定向条件下,由异步发电机的磁链方程可得:
(11)
将式(11)代入异步发电机的电压方程,可得:

(12)
式中:Us为定子电压;ωslip为定转子间的转差,ωslip=ω1-ωr。
进一步整理可得转子侧变流器的仿射非线性模型,其形式与式(9)相同。
x=[irdirq]T
(13)
(14)

(15)
式中:I2×2为2阶单位矩阵。
u=[urdurq]T
(16)
(17)
结合精确线性化条件,对转子侧变流器的仿射非线性模型进行验证。其向量的相对阶计算如下:

(18)
由式(18)可知,RSC仿射非线性模型的相对阶为r1+r2=1+1=2等于其阶数,且矩阵为非奇异矩阵,故可以进行精确线性化。
在系统满足精确线性化的条件下,可通过坐标映射z=φ(x),将原系统转化为z描述的标准线性系统。取坐标映射z=φ(x)为
(19)
进而有:

(20)
根据式(19)~式(20)可得由z描述的标准线性系统,其形式与式(10)相同。
最后,确定原控制变量u与新控制变量v之间的关系,由式(10)、式(20)可得:
(21)
其中,系统的新控制变量v可设定为
(22)
结合式(21)和式(22),可得转子侧变流器在反馈线性化控制下的模型:

(23)
相应的控制框图如图9所示。
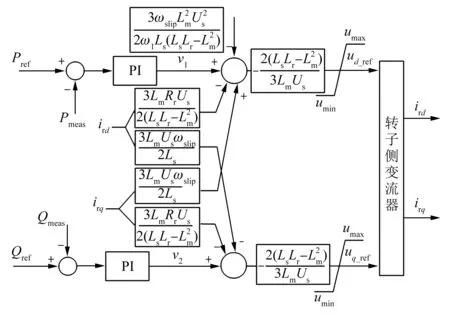
图9 RSC反馈线性化控制结构图
4 仿真验证
4.1 小扰动下的仿真验证
本节通过分析小扰动,采用不同控制策略时,系统的特征值轨迹及时域仿真波形,对比不同控制策略对系统稳定性的影响。
4.1.1 不同串补度
保持系统其他参数不变,分别在采用PI控制和反馈线性化控制的系统中,设置不同的线路串补度(从10%开始,每次增加10%~80%),可得不同串补度下,振荡模式根轨迹如图10所示。
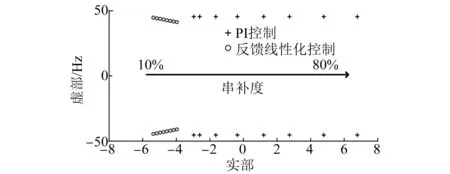
图10 不同串补度下振荡模式的根轨迹
由图10可知,随着串补度增加,PI控制的系统阻尼快速下降。当串补度高于40%时,采用PI控制的系统阻尼为负,而采用反馈线性化控制的系统始终保持正阻尼。因此,与PI控制相比,反馈线性化控制对系统阻尼起到的增强效果更好。
对采用不同控制策略的系统进行时域仿真分析,可得线路串补度分别为10%、50%、80%时,系统输出有功功率如图11所示。
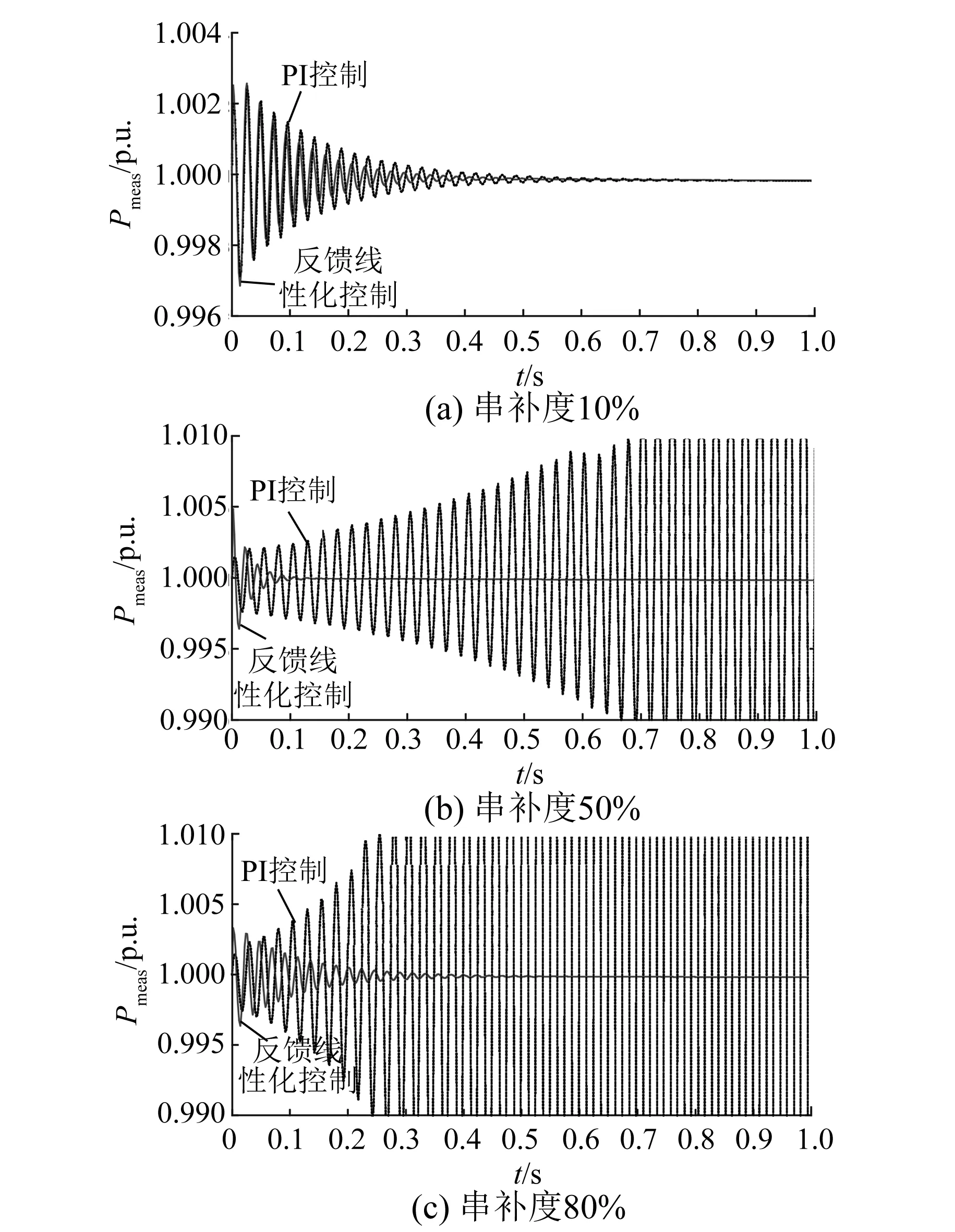
图11 不同串补度下系统的输出有功功率
图11表明,当线路串补度为10%时,两种控制方式下系统均稳定,采用反馈线性化控制的系统,振荡衰减的速度快于采用PI控制的系统;当线路串补度为50%及80%时,PI控制下的系统功率振荡发散,而采用反馈线性化控制的系统仍然稳定。以上现象均与特征值分析结果相符合。
4.1.2 不同风速
保持系统其他参数不变,设定串补度为60%,且分别在采用PI控制和反馈线性化控制的系统中,设置不同的输入风速(从5 m/s开始,步长1 m/s,至12 m/s),可得不同风速下,振荡模式的根轨迹如图12所示。
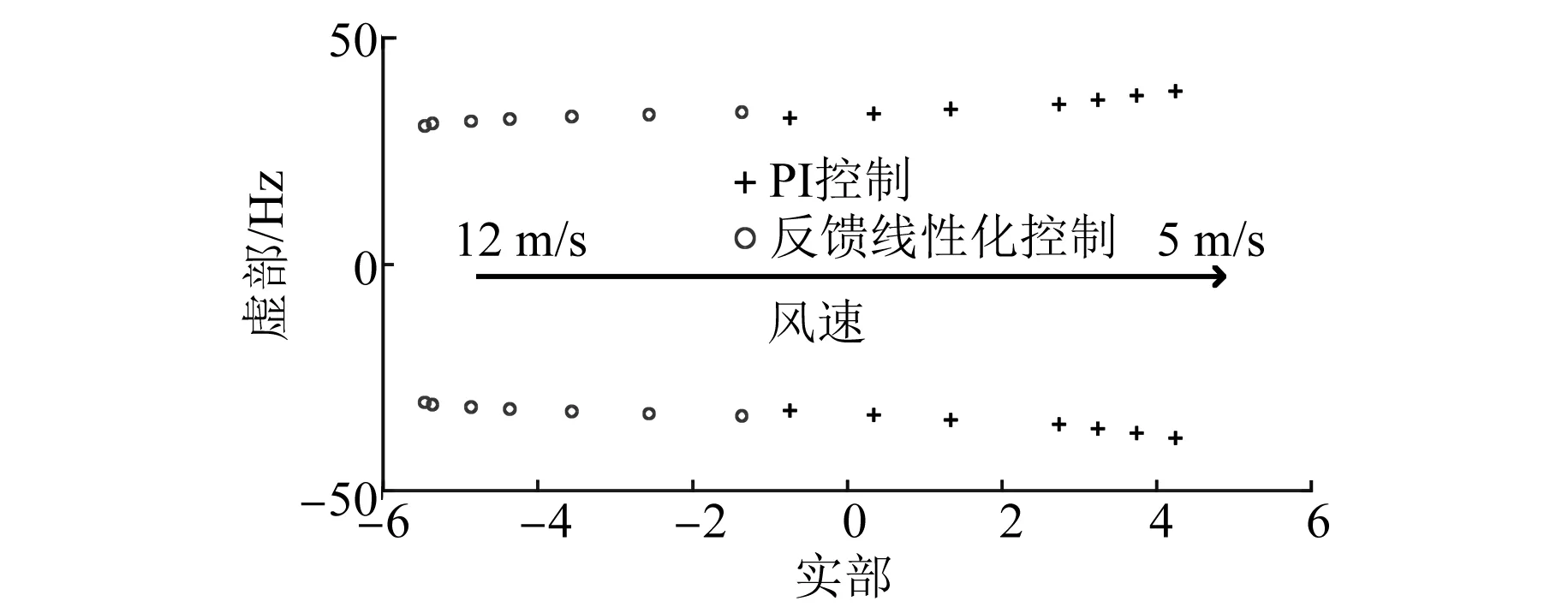
图12 不同风速下振荡模式的根轨迹
由图12可知,随着风速减小,系统阻尼迅速下降。当风速为11 m/s及以下时,采用PI控制的系统阻尼为负。与采用PI控制的系统相比,采用反馈线性化控制的系统均有效增强了系统振荡模式的阻尼。
分别在风速为12 m/s、7 m/s以及5 m/s的条件下,对采用不同控制策略的系统进行时域仿真,所得系统的输出有功功率如图13所示。
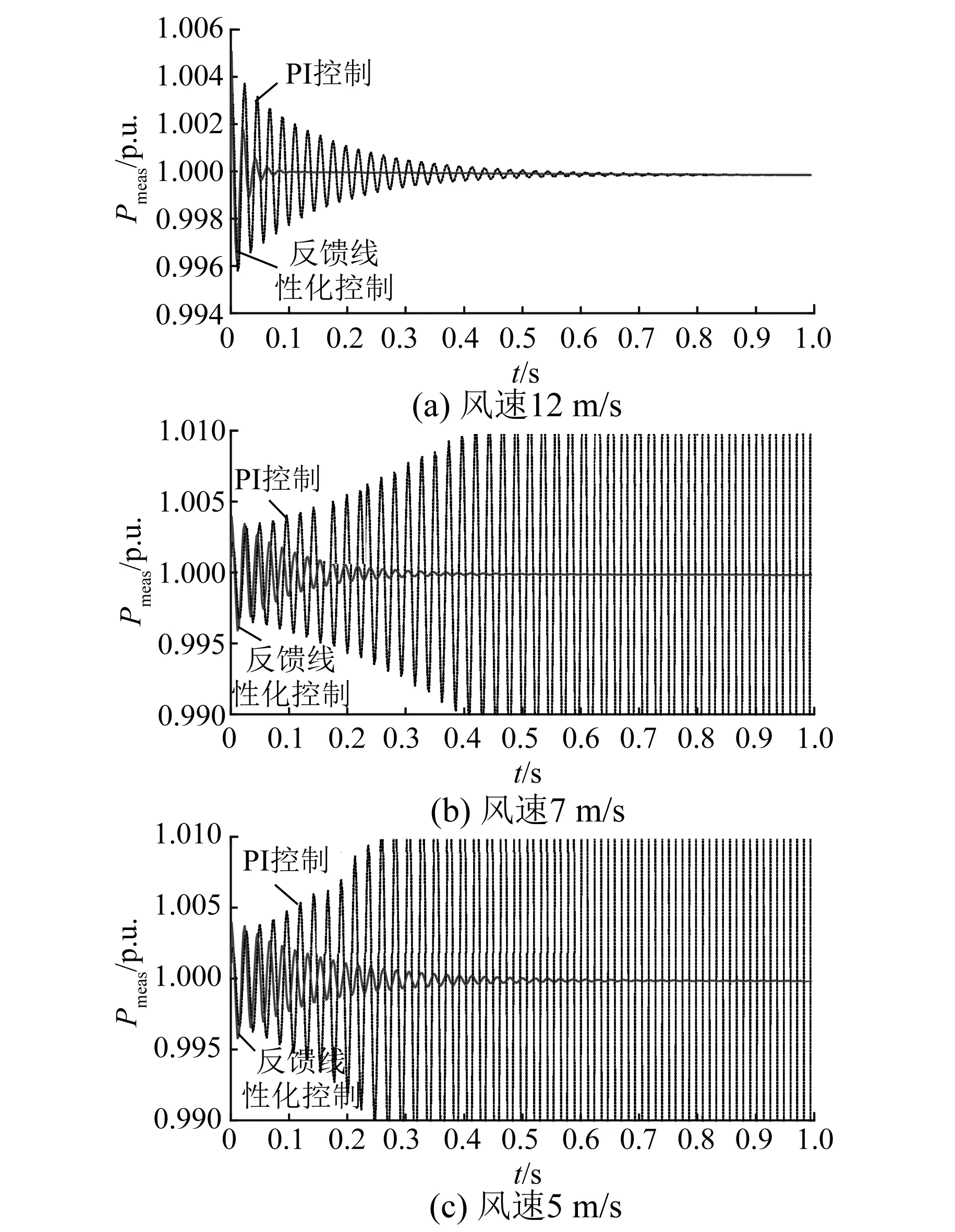
图13 不同风速下系统的输出有功功率
图13表明,当风速为12 m/s时,即高风速条件下,采用两种控制策略的系统经暂态过程后,均稳定收敛,但反馈线性化控制收敛速度明显快于PI控制。而风速为7 m/s或5 m/s时,PI控制策略下的系统振荡失稳,采用反馈线性化控制的系统仍然保持稳定。以上现象均与特征值分析结果相符合。
4.2 大扰动下的有效性验证
在大扰动下,对比PI控制与反馈线性化控制对非线性环节的优化控制效果。调整风速为8 m/s、串补度为40%,此时系统为正阻尼系统。通过改变系统初值,使其远离平衡点的方式,可以模拟大扰动后系统的运行情况。
4.2.1 PI控制下的稳定性分析
系统RSC内环采用PI控制时,控制器限幅环节设置与图3一致。其中,ud_ref限幅上限值为2。通过MATLAB计算可得系统平衡点ud_ref值为1.46。当ud_ref扰动后初值下降为1时,ud_ref及系统输出的有功功率波形图分别如图14和图15所示。

图14 PI控制下保留限幅时的ud_ref波形图

图15 PI控制下保留限幅时的有功功率波形图
由图14可知,大扰动后,ud_ref电压限幅持续饱和,而对应正阻尼系统的输出功率中则出现10.1 Hz的限幅参与的次同步振荡(切换型振荡)。
从分岔角度看,系统轨迹从初值点出发经暂态过程,最终运行在平衡点周围的非光滑极限环(RSC限幅持续饱和),说明正阻尼系统在限幅参与下发生了切换型振荡。
4.2.2 反馈线性化控制下的稳定性分析
保持系统其他设置不变,当系统RSC采用反馈线性化控制时,在RSC的d轴电压参考值出口处设置与图9相同的限幅环节。逐步下调ud_ref初值,所得部分ud_ref波形如图16所示。
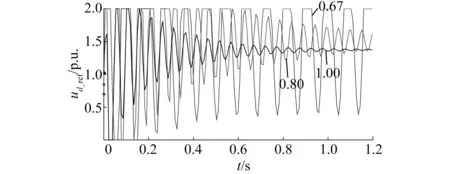
图16 FLC下不同初值时的ud_ref波形图
由图16可知,当ud_ref初值为1时,与PI控制时系统发生切换型振荡相比,采用反馈线性化控制的系统经暂态过程后并未发生振荡。而进一步下降ud_ref初值为0.8时,系统仍为收敛趋势。最终,当ud_ref初值下调至0.67时,系统发生切换型振荡。与上述波形相应的系统运行轨迹如图18所示(为直观,忽略了部分暂态过程)。
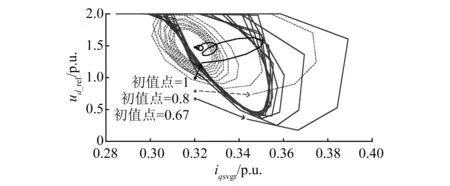
图17 FLC下不同初值时的iqsvgr-ud_ref相图
从分岔角度分析,当ud_ref初值大于0.67时,系统运行轨迹从初值点出发,经暂态过程逐渐回归平衡点(初值为1时对应点线,初值为0.8时对应虚线);当初值小于0.67(系统轨迹对应实线)时,系统运行轨迹最终运行在平衡点周围的非光滑极限环(切换面为ud_ref限幅上限),对应正阻尼系统出现切换型振荡。
综上,对于大扰动下的正阻尼系统,采用PI控制时,初值为1即发生切换型振荡。而采用反馈线性化时,初值降为0.67才发生切换型振荡。这说明采用反馈线性化控制能有效增大平衡点的吸引域,从而增强系统的稳定性。
5 结 语
本文结合反馈线性化控制原理,设计了DFIG转子侧变流器的反馈线性化控制策略。通过特征值分析和相图分析,分别验证了系统小/大扰动下的控制效果,结果表明反馈线性化控制比传统PI控制更优,主要结论如下:
(1) 反馈线性化控制有效减弱了控制环节中非线性带来的影响,优化了控制器的结构。在不同运行条件下,反馈线性化控制均对系统稳定性起到了较好的增强效果。
(2) 对于小扰动下的系统,在低风速、高串补的条件下,反馈线性化控制均能有效增强系统阻尼,抑制次同步振荡。
(3) 对于大扰动下的系统,采用反馈线性化控制能有效增大系统平衡点的吸引域,从而使系统能承受更大的初值偏移,增强了系统的稳定性。
