单向推挽式直流自耦变压器拓扑及其控制策略
2022-08-30胡隽璇曾智桢韩鸣宇刘峪涵汪星耀周友维左文平
胡隽璇,曾智桢,韩鸣宇,刘峪涵,汪星耀,周友维,左文平
(1.中国电建集团中南勘测设计研究院有限公司,湖南 长沙 410014;2.强电磁工程与新技术国家重点实验室(华中科技大学),湖北 武汉 430074)
1 引言
新能源发电具有资源量巨大、清洁无污染等多种优点,构建以新能源为主体的新型电力系统是确保我国顺利实现碳达峰、碳中和目标的有力保障。直流输电技术作为解决大规模新能源外送的重要手段,近些年已得到了广泛的工程实践应用。随着直流输电工程的增多,互联不同电压等级直流输电系统,构建直流电网的优势性更加明显[1-5]。作为构建直流电网的关键技术设备,直流变压器也因此得到了广泛的关注与研究[6-8]。
文献[9]采用交流变压器联接两个模块化多电平换流器(Modular Multilevel Converter,MMC)的交流端口,提出了一种面对面联接的直流变压器。双有源桥(Dual Active Bridge,DAB)直流-直流变换器具有功率密度高、电流应力小、易实现软开关等多种优点[10,11]。但是传统单个DAB的工作电压与电流均较小,不能直接应用于高电压等级直流系统互联。文献[12,13]通过将多个DAB的输入端口串联、输出端口并联,提出了模块化DAB型直流变压器,实现了总体工作电压与电流的提升。上述直流变压器[9-13]均属于传统DC-AC-DC技术,全部功率传输都需要经过两级交直流功率变换,因此,普遍存在运行损耗高与换流容量高等缺陷。为提高功率传输效率,文献[14-17]研究了直接耦合式直流变压器,通过在两个直流系统间建立一定程度上的直接电气互联,实现了部分功率的直接传输,降低了系统总的换流容量。上述直流变压器均为双向直流变压器,即具备控制功率在互联直流系统间双向传输的能力。在新能源外送等部分特定场景下,功率可能只需要从一个直流系统单向地传输到另一个直流系统。此时,采用单向直流变压器将会有效降低工程设备造价。
文献[18]研究了一种单向直流变压器,其结合了LCL直流变压器以及传统交流变压器,实现了较高的升压变比。文献[19]中提出将面对面联接直流变压器中受端直流系统侧MMC更换为二极管整流电路,可作为单向直流变压器,进而降低设备造价。但上述单向直流变压器仍采用了传统DC-AC-DC技术,系统全部直流功率传输都需先通过逆变器逆变为交流功率,再经过二极管整流为直流功率,因此,总的换流容量较大,相应运行损耗也将上升。
为解决上述单向直流变压器存在的传输效率低缺陷,本文以文献[20,21]中提出的推挽式直流自耦变压器(Push-Pull Direct current Auto-Transformer,PPDAT)为研究基础,进一步提出了升压型单向PPDAT与降压型单向PPDAT,并研究了单向PPDAT的通用型控制策略。
2 单向PPDAT的拓扑及工作原理
根据功率传输方向,单向PPDAT可划分为升压型单向PPDAT(step-Up Unidirectional PPDAT,UU-PPDAT)与降压型单向PPDAT(step-Down Unidirectional PPDAT,DU-PPDAT)两类单向直流自耦变压器拓扑。UU-PPDAT能够实现低压直流系统向高压直流系统单向传输功率,DU-PPDAT能够实现高压直流系统向低压直流系统单向传输功率。
2.1 UU-PPDAT拓扑及工作原理
UU-PPDAT拓扑如图 1所示,其主要包含桥臂1(arm1)、桥臂2(arm2)、四绕组变压器、二极管VD3与VD4、电感LUU与电容CUU。桥臂1与桥臂2均是由半桥子模块串联构成,子模块数目均为N12。二极管VD3与VD4、电感LUU与电容CUU构成全波整流电路。图1中,E1与E2分别为低压直流系统与高压直流系统的额定电压;UL与UH分别为UU-PPDAT低压侧与高压侧的端口电压;idcL与idcH分别为UU-PPDAT低压侧与高压侧直流电流;uac1、uac2、uac3、uac4分别为四绕组变压器中绕组1、绕组2、绕组3、绕组4两端电压;i1、i2、i3、i4分别为四绕组变压器中绕组1、绕组2、绕组3、绕组4流过的电流;uarm1与uarm2分别为桥臂1与桥臂2输出电压;uC为电容CUU两端电压;iCdc为电容CUU流过的直流电流;irec为电感LUU流过的电流。

图1 UU-PPDAT拓扑结构Fig.1 Topology of UU-PPDAT
四绕组变压器绕组间互感耦合经特定设计:绕组1与绕组2、绕组3与绕组4之间强耦合,可忽略相互间的漏抗,绕组1、绕组2与绕组3、绕组4之间的漏抗数值相同。
稳态运行时,UH与UL保持恒定,忽略线路电阻时,则分别等于E2与E1。为维持UH与UL稳定,桥臂1与桥臂2输出电压uarm1与uarm2中应包含有直流分量Uarmdc,uC也应保持稳定,满足式(1):
(1)
假设UU-PPDAT传输功率为Pdc,升压变比为K=E2/E1,忽略系统运行损耗,则idcL与idcH分别为:
(2)
因此,基于直流自耦结构,UU-PPDAT能够实现部分功率的直接传输,设无需经过二次功率变换的直接传输功率为Pdir,如式 (3)所示,剩余功率则需通过四绕组变压器完成传输。
(3)
假设四绕组变压器未传输功率,分析直流分量作用下UU-PPDAT运行特性,此时,iCdc=idcH,桥臂1与桥臂2流过直流电流均为iarmdc=(idcL-idcH)/2,则电容CUU总放电功率PCO、桥臂1与桥臂2总充电功率Pa12I满足式 (4)。因此,当只有直流分量作用时(四绕组变压器未工作),CUU、桥臂1与桥臂2的功率都将不平衡,PCO等于桥臂1与桥臂2总充电功率Pa12I。为维持UU-PPDAT互联直流系统的稳定运行,桥臂1与桥臂2应通过四绕组变压器向CUU传输功率PCO,实现功率平衡。
(4)
四绕组变压器各绕组两端电压与绕组间流过电流满足式 (5),绕组间互感耦合关系满足式 (6)。
(5)
(6)
式中,Li为四绕组变压器中绕组i的自感;Mij为四绕组变压器中绕组i与绕组j间互感;i,j=1,2,3,4,i≠j。
结合式 (5)和式 (6)可知,无论各绕组电流如何变化,绕组1与绕组2、绕组3与绕组4两端电压能够始终保持相反(uac1=-uac2,uac3=-uac4)。
四绕组变压器绕组1与绕组2两端电压uac1与uac2、UU-PPDAT低压侧端口电压、桥臂1与桥臂2输出电压间满足:
(7)
根据uac1与uac2间关系以及式 (7)进一步得到uac1与uac2表达式如下:
(8)
因此,UU-PPDAT能够通过控制桥臂1与桥臂2输出电压实现对绕组1与绕组2两端电压的精准控制,进而控制绕组3与绕组4两端电压与全波整流电路传输至电容CUU的功率数值Prec。绕组3与绕组4推挽式工作,分别通过二极管VD3与VD4实现对电容CUU的充电,Prec与电感电流irec间关系如式(9)所示。

(9)
式中,t0为初始时间;T为UU-PPDAT的运行周期时间。
UU-PPDAT若能稳定传输Pdc功率,则Prec应等于PCO。结合式 (4)与式 (9),得到式 (10),单位周期时间内irec平均值应等于idcH。
(10)
根据上述分析可知,桥臂1与桥臂2输出电压中应包含直流分量与交流分量,直流电压分量支撑UU-PPDAT端口电压稳定,交流电压分量控制桥臂1与桥臂2传输给电容CUU的功率Prec,实现系统稳定运行。为简化功率传输特性分析,桥臂1与桥臂2输出电压交流分量等大反向,设交流电压分量幅值为Uarmac。
电感电流irec与绕组3和绕组4交流电压幅值Uamp、uC以及电感LUU数值相关,假设irec存在断续工况,则Uamp与uC间满足式 (11)。此外,为实现全波整流电路对电容CUU的充电,Uamp应大于uC。
(11)
式中,ω为UU-PPDAT的运行角频率。
下面以单个周期为例,分析Prec与Uamp、uC以及LUU间关系,电感电流irec具有两种断续工况,如图2所示。图2中,t1为irec导通时刻,t2为irec降低为零时刻。

图2 电感电流irec的两种运行工况Fig.2 Working conditions of irec
图2(a)中,t≤π/ω时irec已降为零,则Prec满足式 (12)。图 2(b)中,t=π/ω时irec仍大于零,则Prec满足式 (13),式 (13)中t1与t2分别满足式(14)与式 (15)。Prec=PCO,PCO与Pdc满足式(4)。因此,根据式 (4)、式 (12)与式 (13),能够得到Uamp与Pdc间的定量关系表达式。根据图 2与Prec表达式可知,通过提高Uamp能够增大irec平均值与Prec,进而提高Pdc,实现互联直流系统间更多功率的传输。
(12)
(13)
(14)
(15)
UU-PPDAT正常运行时,绕组3与绕组4推挽式工作。此时,从功率传输角度,四绕组变压器可以等效看为两个三绕组变压器交替工作,分别传输一半功率。uac1与uac4间满足式 (16)。
(16)
式中,u′ac4为绕组4两端电压折算到绕组1侧后的数值;L0U为绕组1与绕组4间漏感(折算到绕组1侧);iUU为UU-PPDAT中桥臂1与桥臂2流过电流的交流分量。
因此,根据功率传输需求能够得到绕组3与绕组4交流电压参考值,进而得到桥臂1与桥臂2输出电压交流分量,控制系统稳定运行。
2.2 DU-PPDAT拓扑及工作原理
DU-PPDAT拓扑结构如图 3所示,主要包含桥臂3(arm3)、桥臂4(arm4)、四绕组变压器、二极管VD1与VD2、电感LDU与电容CDU。桥臂3与桥臂4也是由半桥子模块串联构成,子模块数目均为N34。二极管VD1与VD2、电感LDU与电容CDU构成全波整流电路,四绕组变压器绕组间互感耦合关系与UU-PPDAT相同。图3中,uarm3与uarm4分别为桥臂3与桥臂4输出电压,其他变量与图 1中UU-PPDAT的定义相同。
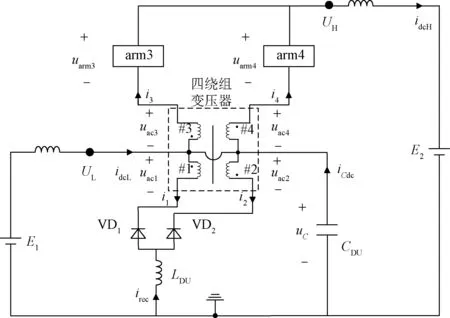
图3 DU-PPDAT拓扑Fig.3 Topology of DU-PPDAT
DU-PPDAT的工作原理与UU-PPDAT类似,下面对此进行简要分析。为维持UH与UL稳定,桥臂3与桥臂4输出电压中应包含直流分量Uarmdc,电容CDU两端电压uC需保持稳定,满足式 (17)。
(17)
假设四绕组变压器未传输功率,分析直流分量作用下DU-PPDAT的运行特性,此时,电容总放电功率PCO、桥臂3与桥臂4总充电功率Pa34I满足式(18),两者数值相同。为维持DU-PPDAT互联直流系统的稳定运行,桥臂3与桥臂4应通过四绕组变压器向电容CDU传输功率PCO,实现功率平衡。
(18)
四绕组变压器绕组3与绕组4两端电压uac3与uac4、DU-PPDAT高压侧端口电压、桥臂3与桥臂4输出电压间满足如下等式:
(19)
进一步得到uac3与uac4表达式:
(20)
因此,DU-PPDAT能够通过控制桥臂3与桥臂4输出电压实现对绕组3与绕组4两端电压的精准控制,进而控制绕组1与绕组2两端电压与全波整流电路传输给电容CDU的功率数值Prec。绕组1与绕组2推挽式工作,分别通过二极管VD1与VD2实现对电容CDU的充电。根据上述分析可知,桥臂3与桥臂4输出电压中应包含直流分量与交流分量,直流电压分量用于支撑DU-PPDAT端口电压稳定,交流电压分量用于控制桥臂1与桥臂2向电容CDU传输功率Prec,实现系统稳定运行。
DU-PPDAT中Prec以及电感电流irec等与四绕组变压器的绕组3与绕组4交流电压间的分析与UU-PPDAT相似,不再阐述。
类似地,DU-PPDAT正常运行时,四绕组变压器可以等效为两个三绕组变压器交替工作,分别传输一半功率。uac1与uac4间满足式 (21)。
(21)
式中,u′ac1为绕组1两端电压折算到绕组4侧后的数值;L0D为绕组1与绕组4间漏感(折算到绕组4侧);iDU为UU-PPDAT中桥臂3与桥臂4流过电流的交流分量。
因此,根据功率传输需求能够得到绕组1与绕组2交流电压参考值,进而得到桥臂3与桥臂4输出电压交流分量,控制系统稳定运行。
3 控制策略
UU-PPDAT通过提高绕组3与绕组4交流电压能够提高电感电流irec平均值,进而提高全波整流电路对电容CUU的充电功率Prec,实现更高功率传输。式 (16)为静止坐标系下uac1与uac4间的关系,式中变量均为交流量,控制器较难设计。为得到易于控制的直流量,可将其转换为dq旋转坐标系下,再进行拉普拉斯变换,得到频域下的数学模型,如式 (22)所示。
(22)
式中,uac1d与uac1q分别为uac1的d轴与q轴分量;u′ac4d与u′ac4q分别为u′ac4的d轴与q轴分量;iUUd与iUUq分别为iUU的d轴与q轴分量。
DU-PPDAT通过提高绕组1与绕组2交流电压能够提高电感电流irec平均值,进而提高全波整流电路对电容CDU的充电功率Prec,实现更高功率传输。类似地,可将式 (21)转换到dq旋转坐标系下,进而得到频域下的数学模型:
(23)
式中,uac4d与uac4q分别为uac4的d轴与q轴分量;u′ac1d与u′ac1q分别为u′ac1的d轴与q轴分量;iDUd与iDUq分别为iDU的d轴与q轴分量。
单向PPDAT控制的关键在于根据互联直流系统功率传输需求得到桥臂的参考输出电压,进而得到桥臂中串联子模块开关信号。基于此,设计出适用于单向PPDAT的通用型控制策略,如图 4所示。图4中,Pdcref为功率传输参考值;Pdc为功率传输实际值;udref与uqref分别为全波整流侧绕组交流电压的d轴与q轴分量参考值;ud与uq分别为全波整流侧绕组交流电压的d轴与q轴分量实际值;id与iq分别为桥臂流过交流电流的d轴与q轴分量;L0为绕组1与绕组4间漏感;uarmd与uarmq分别为桥臂输出电压交流分量的d轴与q轴分量参考值;PI为比例-积分控制器;PLL为锁相环,用于测量相角θ。
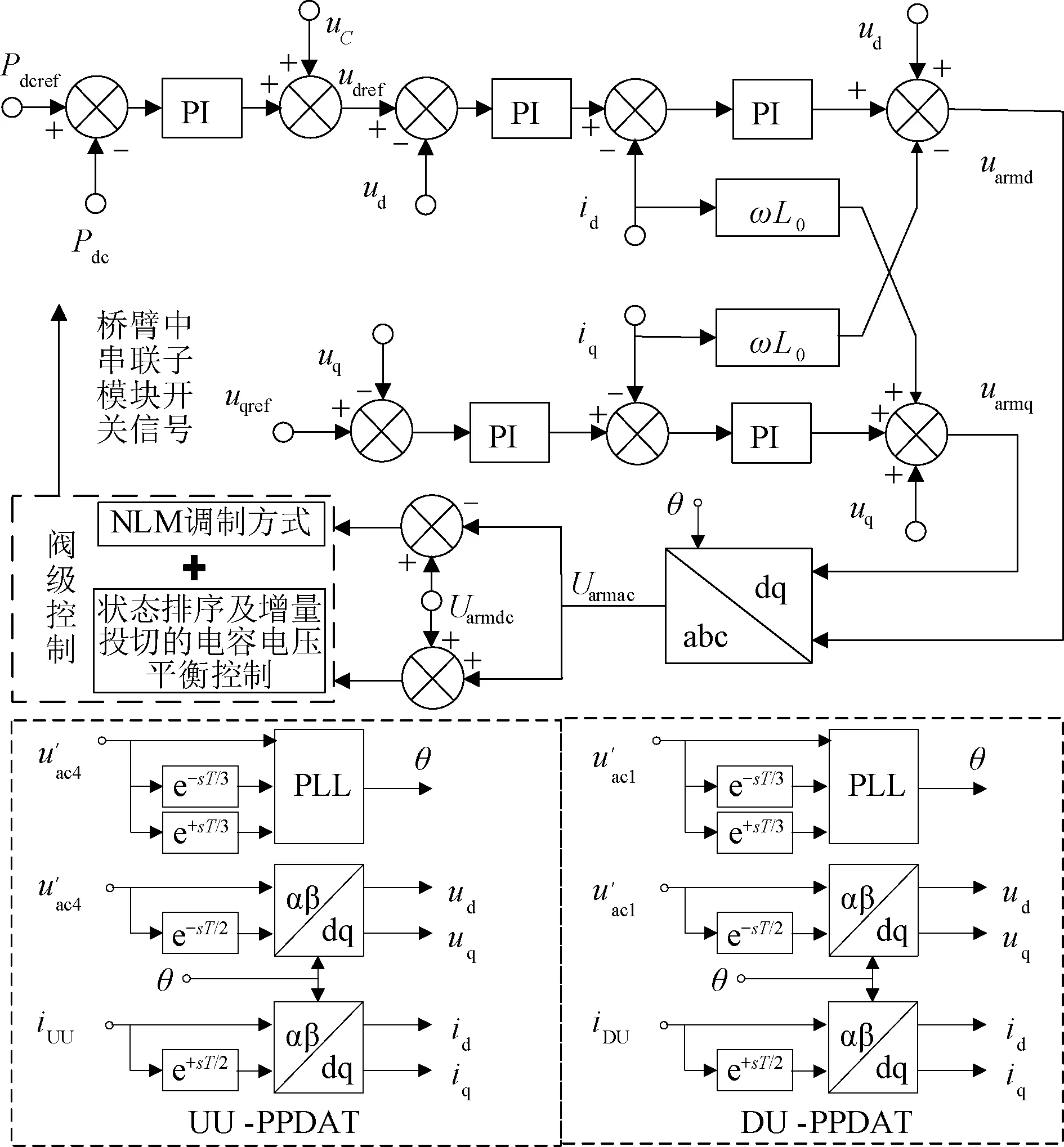
图4 单向PPDAT通用型控制框图Fig.4 Control strategy of unidirectional PPDAT
首先,根据功率传输需求得到桥臂输出电压交流分量Uarmac。Pdcref与Pdc的差值经PI控制器后再与uC相加后得到udref,uqref设置为零。udref与ud差值、uqref与uq差值分别通过PI控制器得到电流内环控制器的参考值idref与iqref。电流内环控制器根据式 (22)与式 (23)设计,进而得到Uarmac的d轴与q轴分量参考值uarmd与uarmq,经过dq反变换后最终得到Uarmac。
然后,根据互联直流系统电压等级以及式 (1)与式 (17),得到桥臂输出电压直流分量Uarmdc。
最终,根据Uarmac与Uarmdc得到桥臂电压表达式,结合最近电平调制(Near Level Modulation,NLM)与电容电压平衡控制得到桥臂中串联子模块的开关信号[22]。
UU-PPDAT与DU-PPDAT整体控制策略相同,但部分变量的含义有所不同,虚线框内分别给出了UU-PPDAT与DU-PPDAT控制策略下部分变量的含义。其中,对于UU-PPDAT,相角θ由u′ac4得到,ud与uq分别对应u′ac4的d轴与q轴分量,id与iq分别对应iUU的d轴与q轴分量。对于DU-PPDAT,相角θ由u′ac1得到,ud与uq分别对应u′ac1的d轴与q轴分量,id与iq分别对应iDU的d轴与q轴分量。
4 仿真验证
为验证所提单向PPDAT拓扑及其运行控制策略的有效性,本节基于PSCAD/EMTDC平台搭建了320 kV/500 kV,1 000 MW的UU-PPDAT与DU-PPDAT仿真模型。仿真模型示意图分别如图 1与图 3所示。UU-PPDAT仿真参数见表1,DU-PPDAT仿真参数见表2。

表1 UU-PPDAT仿真参数Tab.1 Simulation parameters of UU-PPDAT
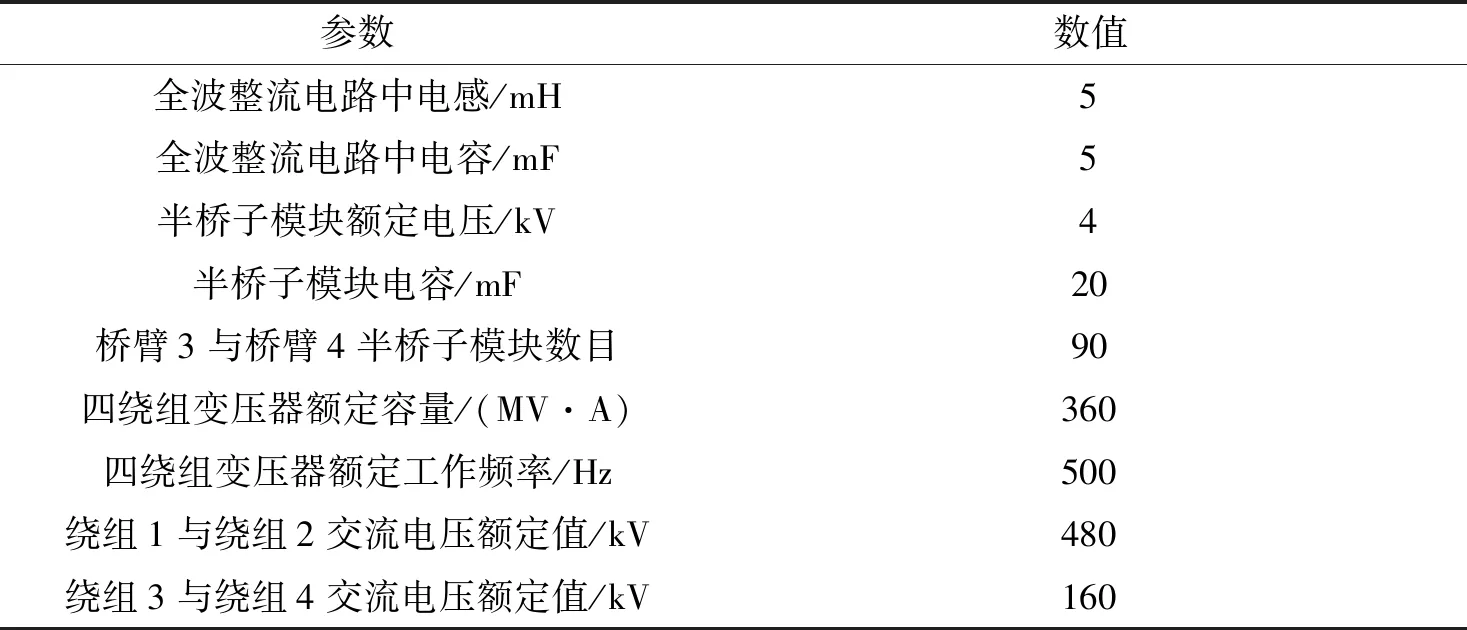
表2 DU-PPDAT仿真参数Tab.2 Simulation parameters of DU-PPDAT
桥臂中串联子模块数目需考虑桥臂输出电压直流分量与交流分量要求,由于半桥子模块不能输出负向电压,因此,设桥臂中串联子模块数目对应其2倍直流电压分量。若子模块额定电压为4 kV,计算得到UU-PPDAT桥臂1与桥臂2子模块数目N12=(320+320)/4=160,桥臂3与桥臂4子模块数目N34=(180+180)/4=90。全波整流侧四绕组变压器中各绕组交流电压额定值均选取为1.5倍的电容电压,UU-PPDAT中绕组3与绕组4交流电压额定值为270 kV,DU-PPDAT中绕组1与绕组2交流电压额定值为480 kV。
4.1 UU-PPDAT仿真结果
图 5给出了UU-PPDAT的仿真结果,为充分验证系统的动态响应速度,设置仿真工况如下:0.5 s前UU-PPDAT功率传输指令值为500 MW,0.5~1 s,UU-PPDAT功率传输指令值线性增长为1 000 MW,斜率为1 000 MW/s。
图 5 (a)给出了UU-PPDAT高、低压侧端口电压UH与UL的仿真结果,可以看出,UH基本维持在500 kV,UL基本维持在320 kV,对应互联直流系统电压等级。图 5 (b)给出了UU-PPDAT中有功功率仿真结果,可看出,功率传输实际值Pdc可以很好地跟踪功率传输指令值Pref,系统动态响应速度较快。UU-PPDAT中桥臂1与桥臂2总的换流功率Pc明显低于Pdc,系统能够实现部分功率的直接传输,功率传输效率较高。图 5 (c)表明桥臂1与桥臂2中子模块电容电压Uarm1,C与Uarm2,C基本维持在4 kV,系统能够稳定运行。图 5 (d)给出了四绕组变压器绕组1两端交流电压的有效值Uac1rms,可以看出,当功率传输指令值由500 MW上升至1 000 MW时,Uac1rms数值也相应上升约20 kV,进而满足系统更高的功率传输需求。图 5 (e)与图 5 (f)分别为0.2~0.21 s期间(Pdc为500 MW)与1.2~1.21 s期间(Pdc为1 000 MW)四绕组变压器各绕组两端交流电压细节波形,可以看出,绕组1与绕组2两端电压保持相反,绕组3与绕组4两端电压保持相反;绕组1与绕组2的交流电压相位超前于绕组3与绕组4,桥臂1与桥臂2通过四绕组变压器向CUU传输不平衡直流功率,进而实现系统的功率平衡与稳定运行。图 5 (g)与图 5 (h)分别为0.2~0.21 s期间(Pdc为500 MW)与1.2~1.21 s期间(Pdc为1 000 MW)各绕组流过电流细节波形,可以看出,绕组3与绕组4流过电流i3与i4存在电流为零的断续工况,绕组1与绕组2中流过电流i1与i2存在电流为直流的工况,且功率传输指令值上升时电流相应上升。假设i1与i2周期为T,可以看出,i1(t+T/2)等于-i1(t)。因此,i1中包含直流、基波、3次谐波与5次谐波等奇数次谐波分量,会产生一定的无功功率,i2同理。图 5 (i)中给出了电感电流irec及其平均值iavg的仿真结果。0.3~0.303 s期间(Pdc为500 MW),irec周期性变化,最大值低于3 kA,iavg约为1 kA,iavg与idcH(500 MW/500 kV)基本相同,符合理论分析。1.5~1.503 s期间(Pdc为1 000 MW),irec有所增大,最大值已高于4 kA,iavg约为2 kA,iavg与idcH(1 000 MW/500 kV)基本相同,验证了理论分析的正确性。

图5 UU-PPDAT仿真结果Fig.5 Simulation results of UU-PPDAT
4.2 DU-PPDAT仿真结果
图 6给出了DU-PPDAT的仿真结果,为充分验证系统的动态响应速度,设置仿真工况如下:0.5 s前DU-PPDAT功率传输指令值为500 MW,0.5~1 s,DU-PPDAT功率传输指令值线性增长为1 000 MW,斜率为1 000 MW/s。
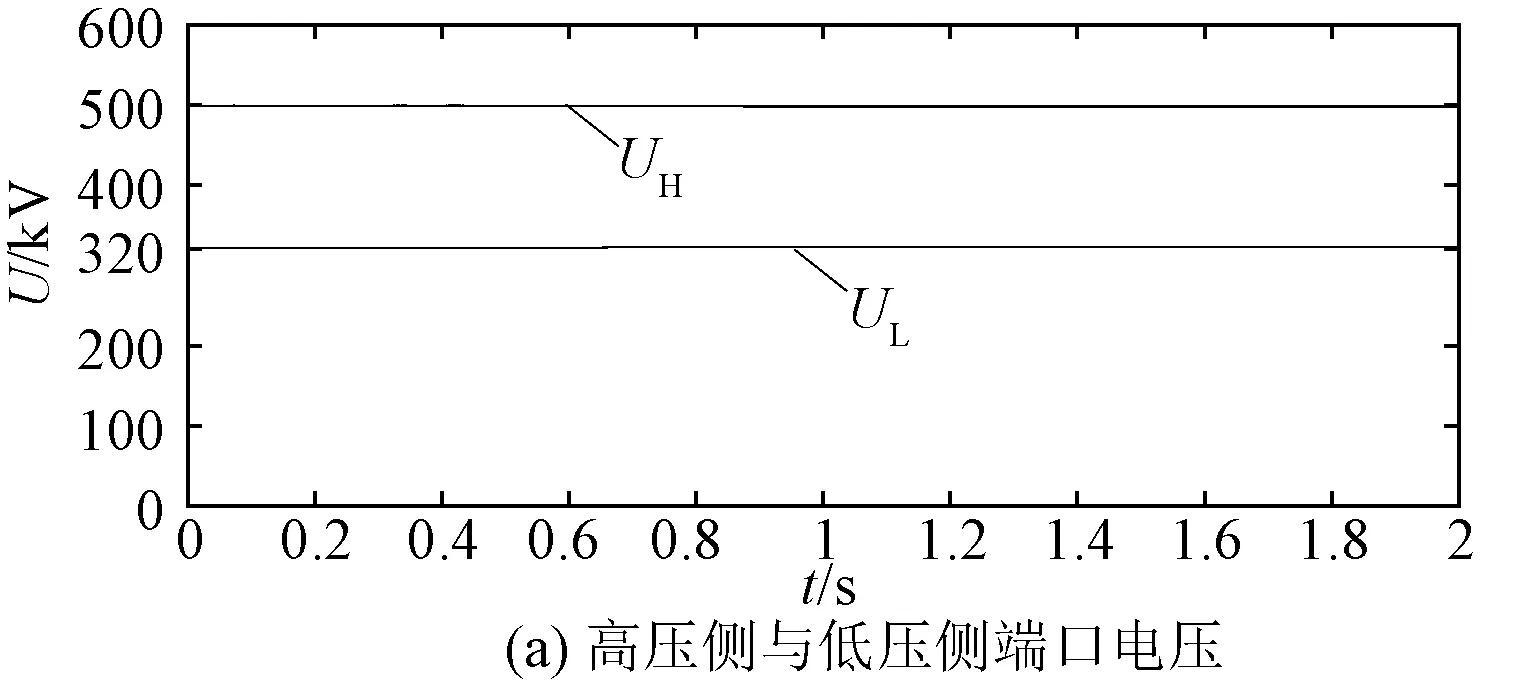
图6 DU-PPDAT仿真结果Fig.6 Simulation results of DU-PPDAT
图6(a)为DU-PPDAT高、低压侧端口电压UH与UL的仿真结果,可以看出,UH基本维持在500 kV,UL基本维持在320 kV,对应互联直流系统电压等级。图 6 (b)为DU-PPDAT中有功功率仿真结果,可以看出,功率传输实际值Pdc可以很好地跟踪功率传输指令值Pref,系统动态响应速度较快。DU-PPDAT中桥臂3与桥臂4总的换流功率Pc明显低于Pdc,系统能够实现部分功率的直接传输,功率传输效率较高。图 6 (c)表明桥臂3与桥臂4子模块电容电压Uarm3,C与Uarm4,C基本维持在4 kV,系统能够稳定运行。图 6 (d)给出了四绕组变压器中绕组4两端交流电压的有效值Uac4rms,可以看出,当功率传输指令值由500 MW上升至1 000 MW时,Uac1rms数值也相应上升约5 kV,以满足系统更高的功率传输需求。图 6 (e)与图 6 (f)分别为0.2~0.21 s期间(Pdc为500 MW)与1.2~1.21 s期间(Pdc为1 000 MW)各绕组两端交流电压细节波形,可以看出,绕组1与绕组2两端电压保持相反,绕组3与绕组4两端电压保持相反,与理论分析相符。图 6 (g)与图 6 (h)分别给出0.2~0.21 s期间(Pdc为500 MW)与1.2~1.21 s期间(Pdc为1 000 MW)各绕组流过电流细节波形,可以看出,绕组1与绕组2流过电流i1与i2存在电流为零的断续工况,绕组3与绕组4中流过电流i3与i4存在电流为直流的工况,且功率传输指令值上升时电流相应上升。假设i3周期为T,可以看出,i3(t+T/2)等于-i3(t)。因此,i3中包含直流、基波、3次谐波与5次谐波等奇数次谐波分量,会产生一定的无功功率,i4同理。图 6 (i)中给出了电感电流irec及其平均值iavg的仿真结果。0.3~0.303 s时(Pdc为500 MW),irec周期性变化,最大值低于2 kA,iavg约为0.56 kA,iavg与idcH基本相同,与理论分析相符。1.5~1.503 s时(Pdc为1 000 MW),irec有所增大,最大值已高于3 kA,iavg增大一倍,约为1.12 kA,iavg与idcH基本相同,验证了理论分析的正确性。
5 结论
本文研究了单向PPDAT,得出以下结论:
(1) 单向PPDAT根据功率传输方向可划分为UU-PPDAT与DU-PPDAT,两种单向PPDAT均能够基于直流自耦结构实现部分功率的直接传输,该部分功率无需再经过两级交直流功率变换,功率传输效率较高。
(2) 为维持互联直流系统的稳定运行,单向PPDAT需通过四绕组变压器传输桥臂与电容间的不平衡功率。基于特定四绕组变压器与桥臂输出电压控制,UU-PPDAT与DU-PPDAT能实现对各绕组交流电压的快速精准控制,结合全波整流电路,进而控制桥臂对电容的充电功率,维持互联直流系统间功率的正常传输。
