恒温环境中湿度驱动软体轮式机器人
2022-08-30屈涛刘聪代瑶臧红彬
屈涛,刘聪,代瑶,臧红彬*,,2
(1. 西南科技大学 制造科学与工程学院,四川绵阳 621010;(2. 西南科技大学 制造过程测试技术教育部重点实验室,四川绵阳 621010)
软机器人由于其安全性以及与人类和动物的相容性,具有适应周围环境的能力以及抗冲击性的能力而受到了广泛的关注[1]。通过简单的驱动器输入能够执行复杂的运动,实现任意几何形状,执行多步态推进[2-3]。但是,软致动器很难在稳定的环境中保持持续运动。在没有额外刺激和自适应环境相关的挑战,需要复杂人工干预执行多步态推进极大地限制了软机器人的应用前景。这项工作描述了设计在稳定环境中运动的轮式机器人。
能够响应外部刺激(例如湿度,温度,光,磁场和电场)而自我激活的活性物质在软机器人的结构设计和实际应用中起着重要作用,并且它们的特殊驱动机制极大地扩展了软机器人的功能[4-9]。但是,使用这些智能软材料进行设计机器人时仍然需要解决许多问题。例如,由介电弹性体驱动软机器人,小型高压电源的可靠性以及与刚性电源的连接[4,10]。无约束的磁性软机器人需要在强磁场下进行预编程,磁性软机器人的多步态推进需要周期改变磁场[11]。环境湿度驱动的软机器人价格昂贵,并且需要合成灵敏的响应材料或复杂的制造过程[7,12]。由光或热驱动的形状记忆聚合物需要手动重新编程[13]。由于制造上的挑战并且缺乏输出大扭矩的能力,液晶弹性体尚未广泛地集成到不受束缚的机器人结构中[14]。近年来,智能软材料的研究及其在软机器人设计中的应用取得了一些成就。例如,Shin等利用基于不对称摩擦系数的棘轮,在周期的交替湿度和加热条件下,在定向运动中纠正了振荡弯曲运动[15]。但是,这些机器人只能在交替的环境中移动。他们不够智能,因为它们需要额外的刺激条件[16-17]。此外,简单的制造过程和低成本也是软机器人设计的重要因素[18]。为了克服这些缺点,基于Ecoflex-0030和硫酸纸[19-20]制作的软体轮式驱动机器人被制备和测试。
在本文中,使用了硫酸纸和Ecoflex-0030制作无束缚软机器人,该机器人可以响应湿度和温度刺激而可逆地变形并推动自身。首先将Ecoflex-0030涂覆在硫酸纸上形成双层层压叶片。这些条带作为叶片安装在车轮的轮轴上。当将机器人放在均质水温约70°C的热水网格面时,通过交替弯曲和拉直叶片来驱动轮子旋转。机器人的旋转要求初始叶片位于特定初始位置。对机器人的尺寸进行设计并进行机器人动力学建模。最后,制造了连接两轮的手推车,显示机器人的协同作用。
1 硫酸纸变形机理
硫酸纸是通过硫酸处理过后的纸张,其表面纤维被氧化形成致密的凝胶结构(疏水结构),较低的渗透性引发的不对称的膨胀会产生大变形,故硫酸纸对湿度敏感。
图1对硫酸纸表面水接触角进行了表征,其初始水接触角WCA=108°,5 min后再次对水接触角进行测量,WCA=102°。这表明水在纸内部渗透缓慢,其表面致密的凝胶减缓了水分子的渗透,在厚度方向容易形成湿度差。
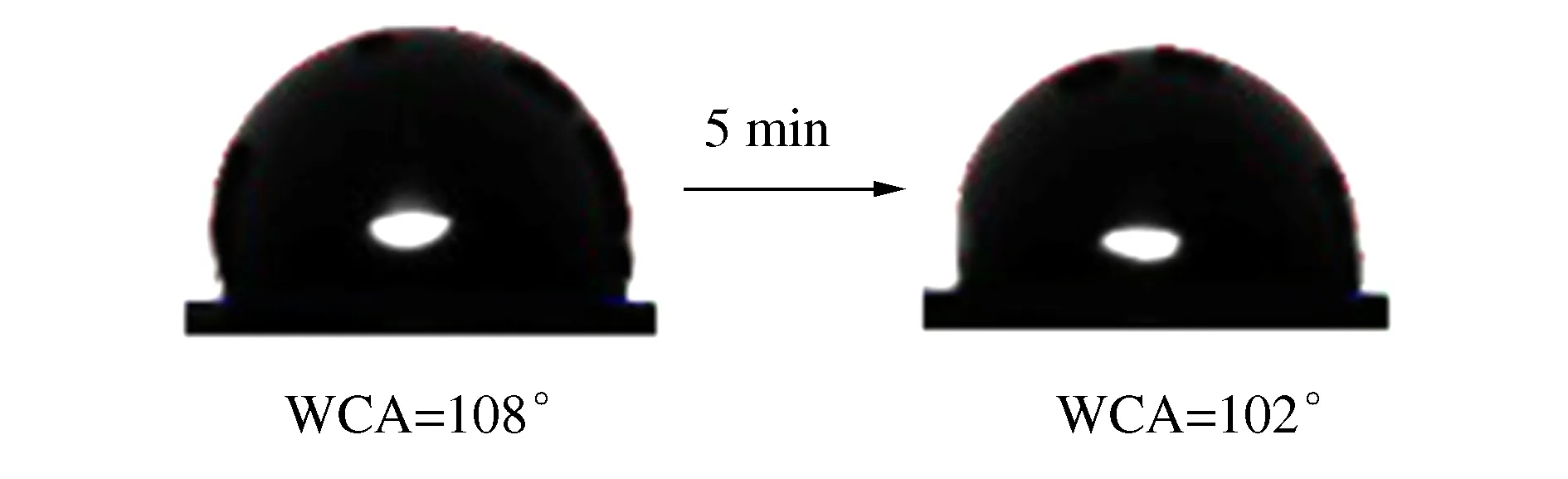
图1 硫酸纸水接触角图像
在扫描电子显微镜下观测硫酸纸表面轮廓(图2),能够发现纸纤维排布大致沿着一个方向,硫酸纸有规律纤维分布的吸水机制引导硫酸纸条带发生可预测的变形,通过控制纤维方向与条带长度方向夹角,可实现弯曲、扭转等运动模式。
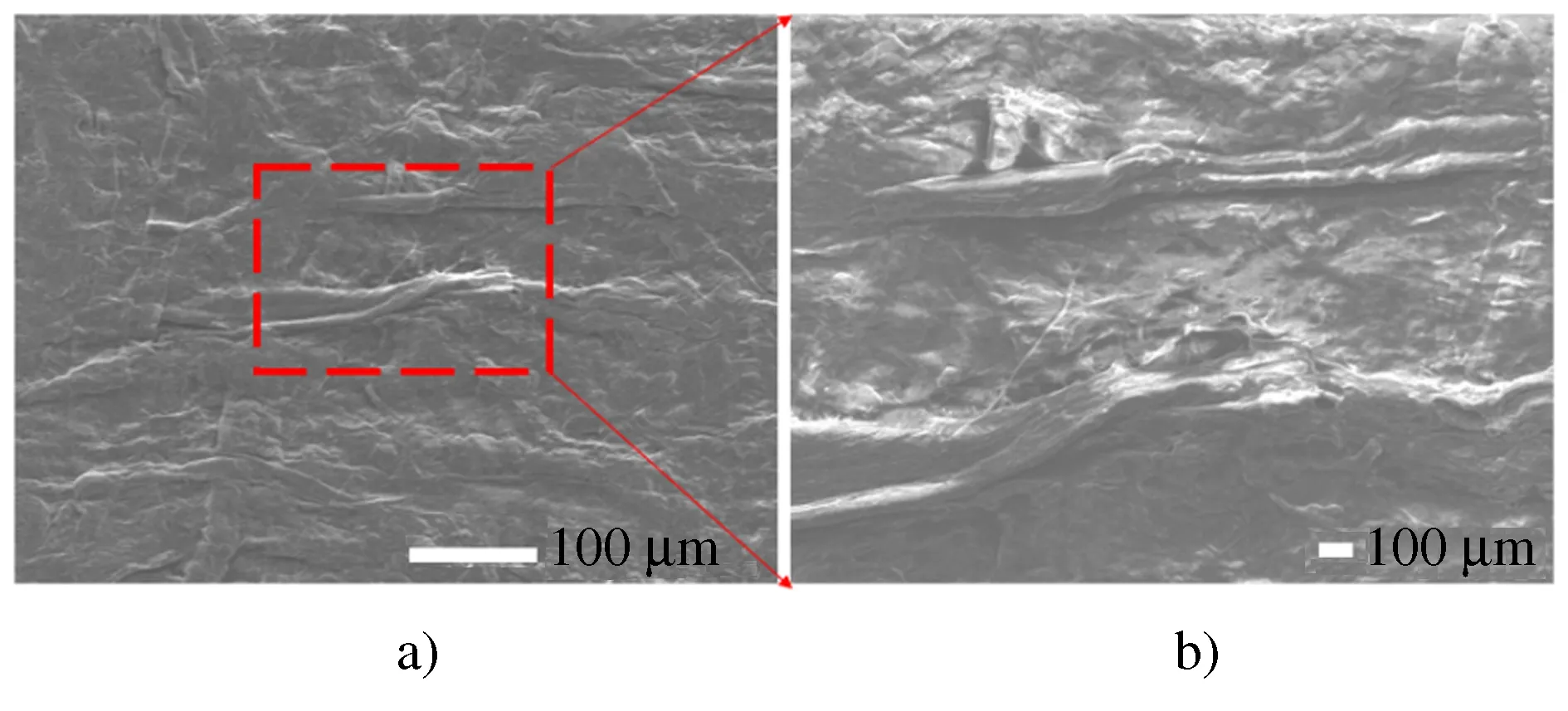
图2 硫酸纸表面扫描电子显微镜图像
2 软体轮式机器人的结构设计
轮式机器人具有机构简单、驱动和控制相对方便、工作效率高等特点,采用硫酸纸叶片驱动轮轴旋转的方式。首先,硫酸纸对湿度敏感(湿膨胀系数β1≈0.1 C-1),单层硫酸纸在多个循环载荷下很容易完全润湿,从而降低了对湿度的敏感性;使用涂布刮膜机将低杨氏模量(E2≈0.069~0.083 MPa)、温度响应(热膨胀系数α2≈279×10-6~284×10-6K-1)的Ecoflex-0030单侧沉积在硫酸纸作为车轮叶片。剪切成矩形条带(L=25 mm,W=20 mm),采用4张叶片均匀分布在车轮轴的圆柱面上,每张叶片的长度L≥πr/2(形成完全包络)来增加驱动力矩;但是L太长很难与圆柱面贴合,且会导致底下的叶片与网格接触时,左下侧叶片被轮轴压住而没被激活(向右运动)。条带长度L方向垂直于硫酸纸纤维排布方向[21]。然后将双层条带固定在低密度圆柱泡沫(ρ=40 kg/m3)的车轮上(r=11 mm,W=20 mm)。轮式机器人的制备如图3所示。
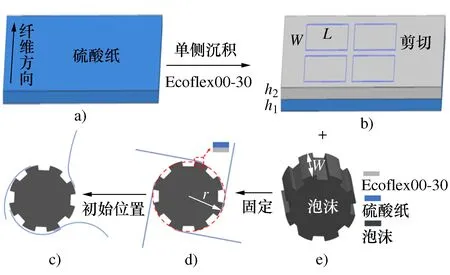
图3 轮式机器人的制备
双层叶片的Ecoflex-0030侧与轮轴刚性连接,原因如下:1) 机器人旋转叶片3必须快速响应包络轮轴以适应地面;2) Ecoflex-0030 与地面接触表面的有一定的粘附力,不利于机器人滚动;3) Ecoflex-0030输出扭矩足够大以适应机器人运动。
3 软体轮式机器人理论分析
3.1 运动分析
在70 ℃的热水网格平面中,硫酸纸对湿度敏感,而Ecoflex-0030对温度敏感加快叶片的拉伸。实现叶片交替弯曲和拉直以改变叶片的轮廓和质心,从而在重力和驱动力矩作用下实现自滚动。机器人滚动的单个步态由两个阶段组成,即主动阶段(图4a),图4b))和被动阶段(图4b), 图4c))。
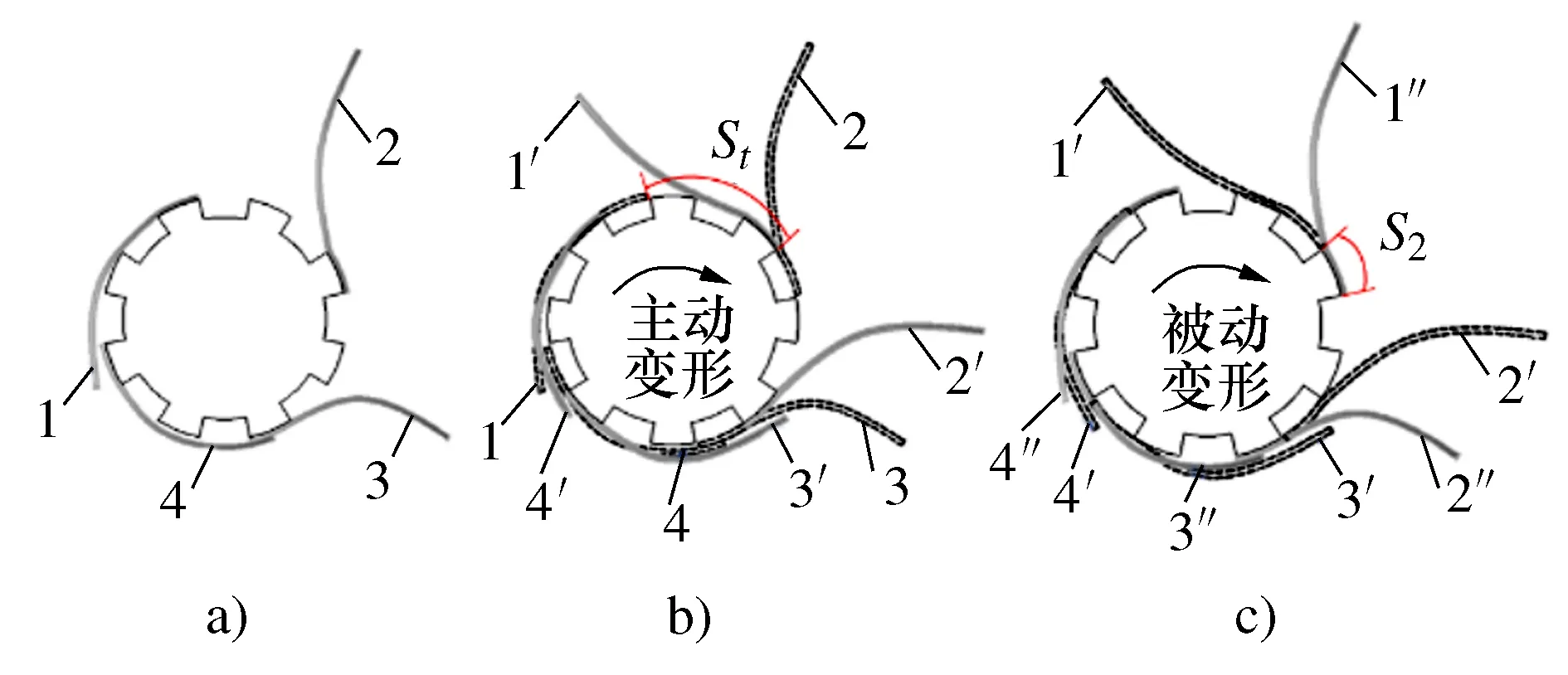
图4 单个步态运动示意图
图4描绘了单个步态运动示意图。其中叶片1到1′到1″为一个步态的运动轨迹,实线表示叶片当前状态,虚线表示叶片上一个状态。在主动阶段,通过依靠不对称叶片的弯曲和拉伸来实现主动旋转,产生足够的湿热应力σ1,σ2和重力惯性;由叶片变形引起的位移称为S1。在被动阶段,被动旋转完全由机器人的重力和惯性控制,并且不能通过停止机器人的变形而受到阻碍。由重力和惯性引起的位移表示为S2。旋转单个步态位移S为
S=S1+S2
(1)
主动阶段必须提供足够的势能,以使被动阶段旋转并返回到主动阶段的初始状态。因此,叶片的初始位置和轮廓对于机器人周期旋转特别重要。
3.2 动力学模型
轮式机器人简化为4个单曲率κ叶片和一个旋转轴,并且在垂直平面上没有厚度(图5)。
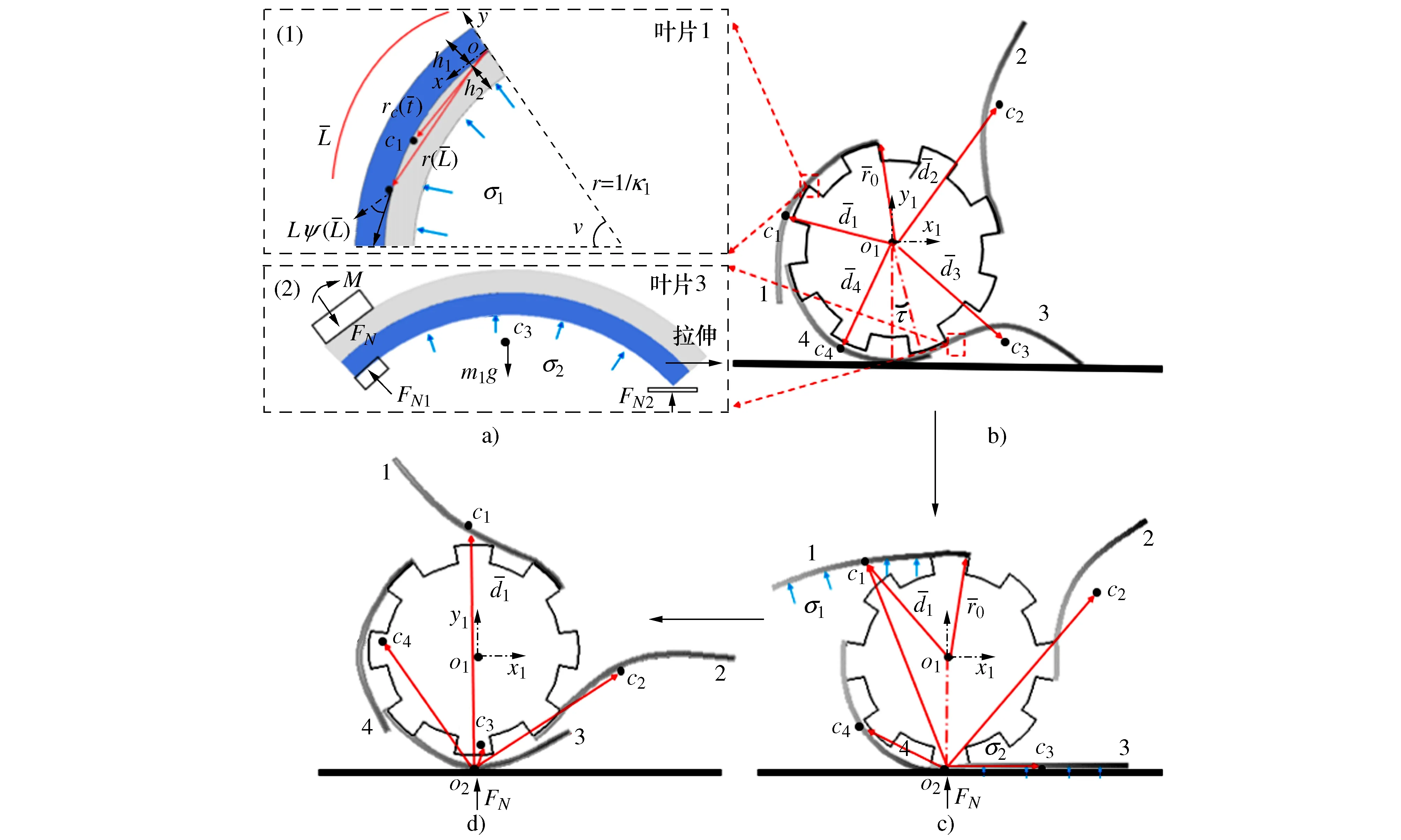
图5 主动阶段动力学模型
轮式机器人的变形特征来自于是叶片曲率和旋转轴随时间变化。 对于随时间变化的叶片曲率,车轮具有初始状态,4个叶片引入初始曲率κ1,κ2,κ3,κ4。曲率的计算公式为

(2)

(3)

(4)
叶片质心c的计算公式为:

(5)
(6)


(7)


(8)
FN=(2m1g+m2g)cos(τ-δ)
(9)

(10)

(11)


(12)

在被动阶段,被动旋转受惯性效应支配,这是一个动态过程。叶片的变形(图5b),图5c))在整个被动阶段都保持不变,原因极短时间内叶片变形速率比轮轴动态运动速度要慢得多,因此叶片被假设为旋转到初始状态的刚性部件。旋转扭矩M2为

(13)
4 软体轮式机器人实验
软体轮式机器人由叶片的湿热应力以及变形叶片轮廓的重力矩驱动。叶片的长度、宽度尺寸在第3节中给出。而双层叶片厚度直接影响是否能够直接驱动机器人的运动,我们对硫酸纸厚度为220 g(h1=0.17 mm)、150g(h1=0.11 mm)、100g(h1=0.08 mm) 和Ecoflex-0030厚度h2=0.1 mm、h2=0.2 mm的层压叶片驱动力矩进行了分析。
首先将Ecoflex-0030作为活性层(响应温度)在下侧(L1)。测量了不同温度条件下不同厚度叶片热应力最大驱动力矩M(图7)。其中力矩的公式M=mgL计算得到。由于硫酸纸与Ecoflex-0030的杨氏模量(E1≈750 MPa,E2≈0.08 MPa)相差大,由双层制动器弯曲等式(2)得到,弯曲曲率接近于0,故不考虑曲率因素。
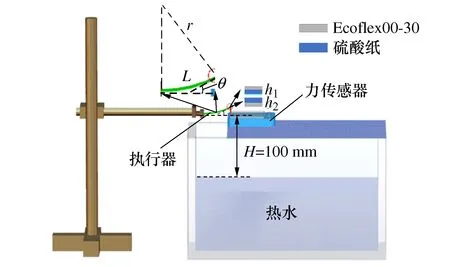
图6 叶片力矩测量示意图

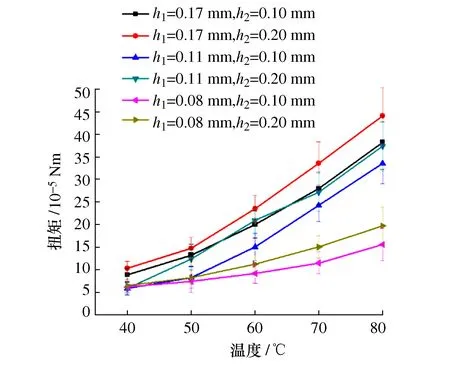
图7 Ecoflex-0030 产生扭矩与温度的关系
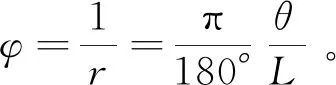

图8 硫酸纸产生扭矩与曲率的关系
叶片的时间响应和输出扭矩直接影响机器人的运动性能。图9描绘了不同温度条件下曲率与时间的图像(h1=0.11 mm,h2=0.1 mm),结果表明温度越高,曲率的变化越大,条带响应越快。当温度为80 ℃时,在16 s内曲率达到1.27 cm-1。曲率的不稳定来自于重力与热应力的耦合以及热水蒸气的不均匀。图10描绘了硫酸纸活性层不同厚度的曲率与时间图像(T=60 ℃),结果表明硫酸纸越厚,达到最大曲率响应时间越长。当硫酸纸厚度为0.08 mm时,在40 s内曲率达到1.38 cm-1。
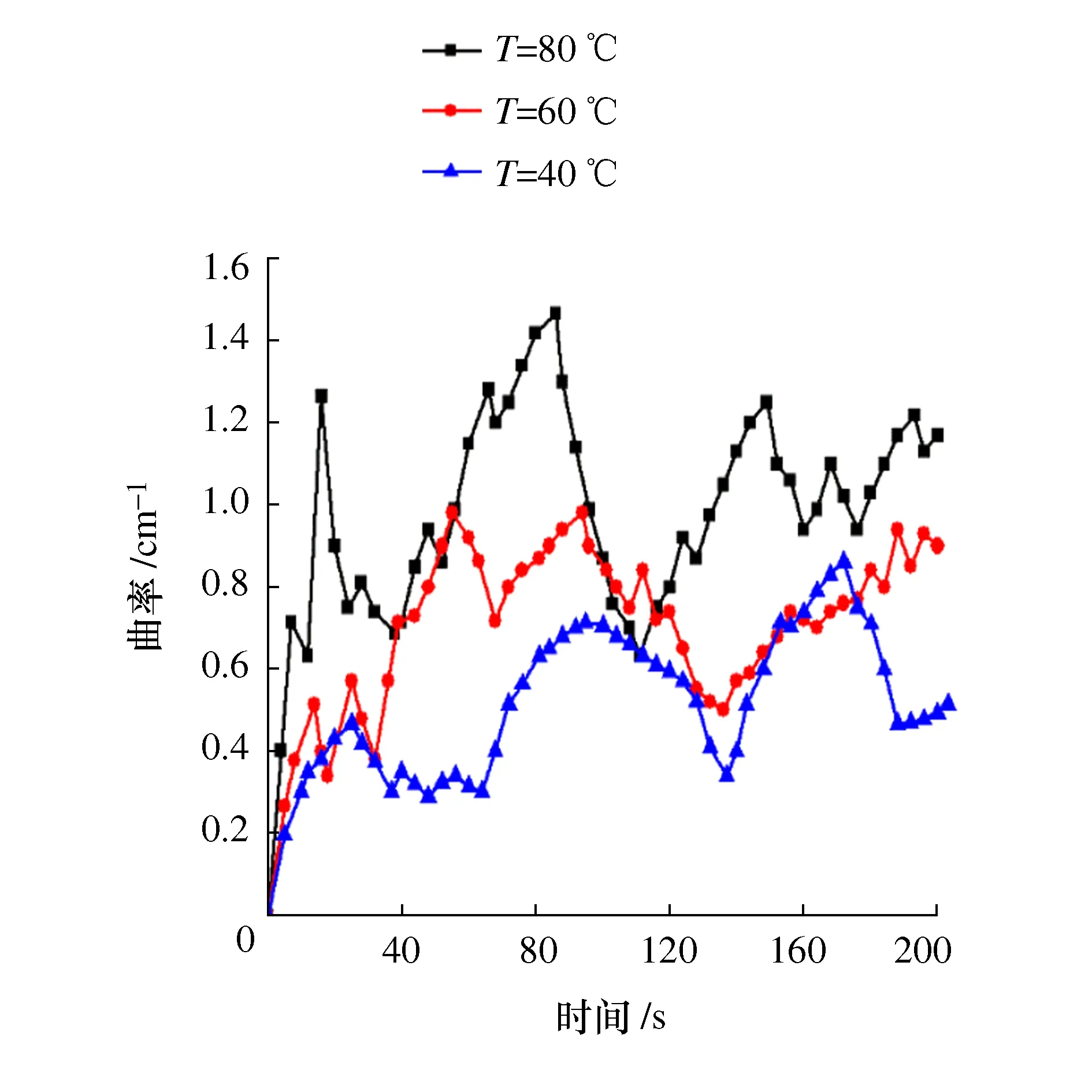
图9 不同温度下曲率与时间曲线关系
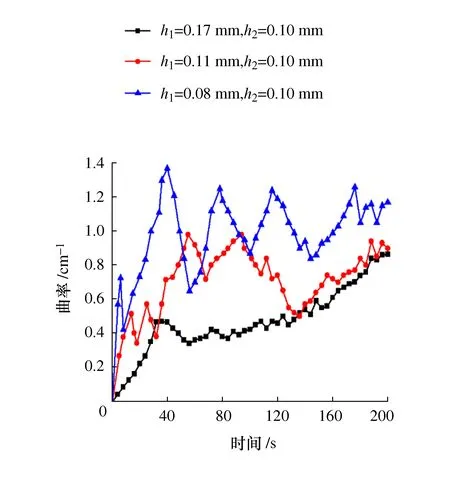
图10 不同厚度下曲率与时间曲线关系
最终选择厚度h1=0.11 mm,h2=0.1 mm叶片驱动车轮。采用热水温度为70 ℃驱动。Ecoflex-0030作为活性层(L1)驱动力矩为24.23×10-5Nm;硫酸纸作为活性层(L2)驱动力矩为37.26×10-5Nm。对叶片扭矩多次循环的输出扭矩进行了测量,扭矩输出的变化可忽略不计(图11)。轮轴的重量仅为0.26 g;机器人包括4个叶片和一个轮轴(图3),总质量仅为0.6 g。为保持机器人持续滚动,极限扭矩在驱动叶片4和叶片2曲率为0(与地面平行配置)下必须具有23.52×10-5Nm的最小扭矩输出保持推进所需的扭矩。但这一瞬间非常短,叶片3一旦向上凹起(图5b)),最小输出扭矩迅速减少至0。故厚度选用h1=0.11 mm,h2=0.1 mm叶片温度为70 ℃时,扭矩满足要求。
图11 叶片(25 mm×20 mm×(0.11 mm+0.1 mm))多次循环输出扭矩
将平坦的网格(孔径0.4 mm,丝径0.12 mm)放在均质温度约70 ℃的热水顶部,以主动引发所需的车轮旋转运动。切割L=25 mm,W=20 mm,h1=0.11 mm,h2=0.1 mm的叶片作为推进器。机器人制造简单,总质量为0.6 g。将这些具有特殊位置和几何形状叶片的机器人放置在网格上面。叶片在旋转90°后(一个步态),将返回初始位置以继续推进而无需手动重新编程。在实验中,机器人在55 s内移动了85 mm,至少运动了5个步态,证明了这种非对称设计对周期循环的可行性(图12a))。最后,我们将两个轮子整合为双轮手推车,显示机器人的协同作用(图12b))。手推车总质量为1.98 g,在72 s内移动了88 mm。
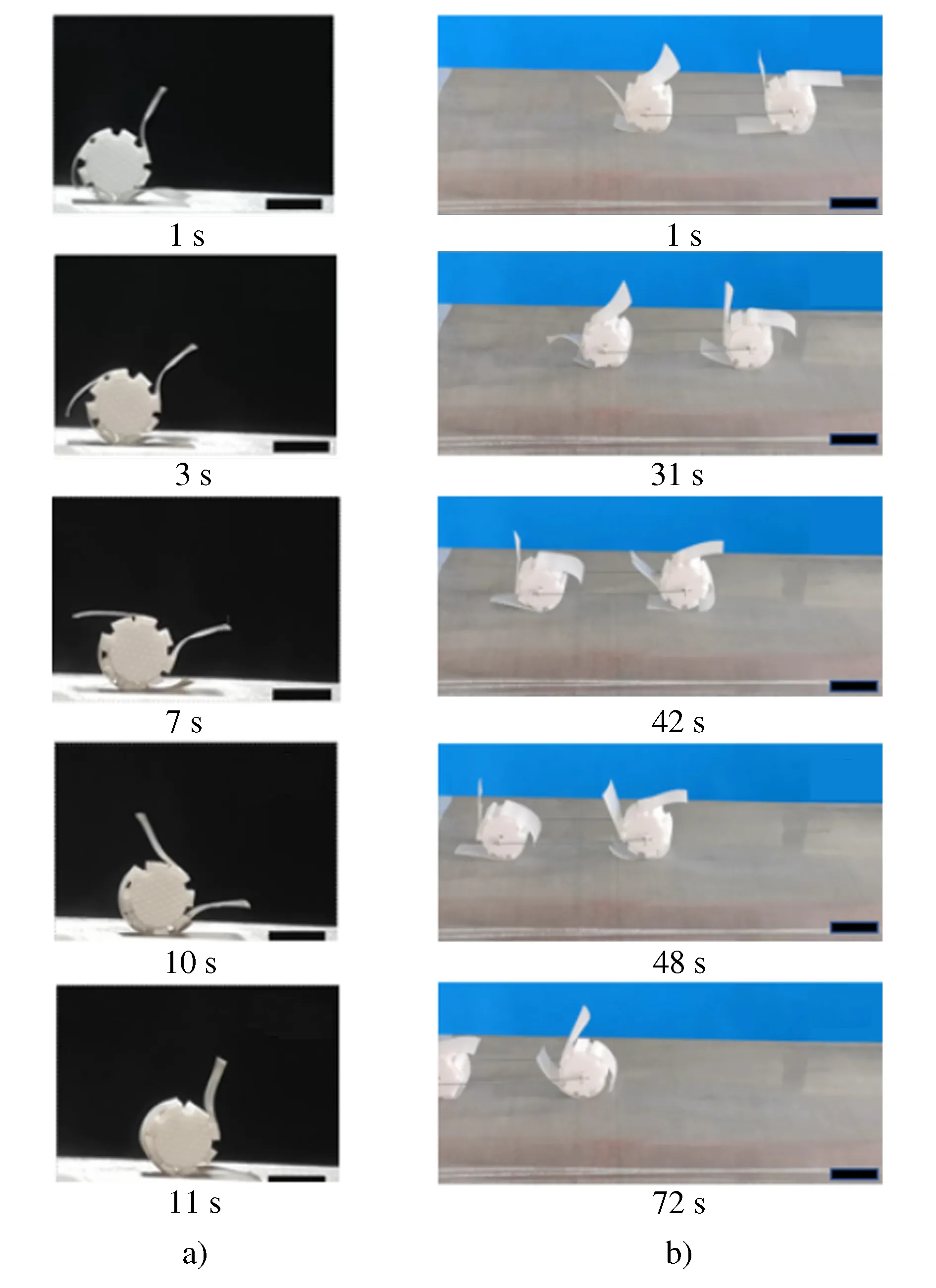
图12 滚动机器人的实验图像(比例尺20 mm)
5 结论
本文利用双层叶片的大扭矩输出和不对称位置来实现对滚动结构中推进的主动控制,不需要额外的编程能够使机器人持续运动;提出了一种新颖的控制方法并简化了机器人的控制。这种机器人摆脱了传统机器人连接复杂的控制系统并有广阔的运用前景。例如,在医疗领域,机器人可以在人类体腔内的固有湿度环境的驱动下爬行的同时执行各种生物医学治疗。这种简单的机器人可以扩展为主动控制软机器人,并最终控制具有更复杂的可逆功能和机车步态的机器人。到目前为止,我们选择了工业生产的硫酸纸作为机器人驱动材料,驱动这种机器人仍然需要苛刻的条件;将来可以使用响应外部刺激(例如光,pH和湿度)而自我激活的活性物质会导致敏捷和大幅度响应。
