辅助谐振变换极软开关逆变器的新型控制方法
2022-08-29成庶向超群郭帅邯席振
成庶,向超群,郭帅邯,席振
(1. 中南大学 交通运输工程学院,湖南 长沙 410075;2. 河北汉光重工有限责任公司,河北 邯郸 056017)
随着逆变技术的高频化要求不断提高,开关损耗所占比重不断提高,且还会带来开关噪声和电磁干扰等一系列附加问题。为了解决这一问题,软开关技术应运而生[1-4],软开关技术发展早期由于引入的辅助元件与主电路相互影响,电路的工作条件苛刻,研究如何降低电磁干扰和开关噪声,并提高系统工作的输出质量[5-6]成为亟待解决的问题。DⅠVAN[7]于1986年首次提出了谐振直流环节逆变器拓扑,有效提高了逆变器的性能并简化了控制策略。DE 等[8]提出了著名的极谐振软开关逆变回路拓扑,引领了学术界对该回路的广泛研究。因为其仍然可使用PWM 技术进行调制,可应用于电机调速。之后新型辅助谐振型回路拓扑不断涌现[9-10],其中,ARCP 辅助电路的控制尤为重要,关系到软开关能否正常工作以及设备的工作寿命。ARCP 主要有2 种辅助开关管控制模式,即定时间控制[11-12]和变时间控制[13-15]。而2种方式都有明显的缺点,为了解决轻载条件下的大电流应力问题,KOU 等[15]采用了固定分时控制方法。根据负载电流,将控制区域分为大电流区域和小电流区域,2个区域中辅助管的开启时间分别固定。然而该方法尚未解决固定定时控制中产生的不良负载电流的问题。本文提出了一种基于负载电流预测的可变时间控制方法。根据预测的负载电流瞬时值,调整辅助管的开通时间以适应负载电流的变化。
1 ARCP逆变器及其软开关过程
1.1 辅助谐振变换极(ARCP)软开关逆变器拓扑
图1为ARCP软开关逆变器的回路拓扑,ARCP属于零电压开关型的软开关AC 侧逆变器拓扑。它由逆变器的主电路和辅助谐振电路组成,每一主电路与一辅助电路相对应。每个辅助电路由2个反向串联的功率开关管,一个辅助电容和2个辅助电感组成。通过控制辅助电路的谐振,同相主电路开关可以实现零电压开关(ZVS)。因为三相ARCP软开关逆变器回路结构完全相同,且相互独立,因此取电路的一相进行分析,其等效电路如图2所示。谐振回路分别由辅助开关管(VT1,VT2),主谐振电容(C1,C2),辅助谐振电容(Cr1,Cr2),辅助谐振电感Lr,辅助二极管(D3,D4)组成。

图1 辅助谐振变换极三相软开关逆变器Fig.1 Auxiliary resonant transform pole three-phase soft-switching inverter

图2 单相等效电路Fig.2 Single-phase equivalent circuit
1.2 ARCP的软开关过程
ARCP 通过辅助回路与主回路的谐振使主电路开关实现零电压开关,由于在主电路换流的时刻才会发生谐振,其他时间的控制策略并未发生改变,所以硬开关逆变器的调制策略均可用于ARCP的主电路。图3为一个开关周期内系统各器件工作的主要理论波形,自上而下依次为,辅助开关和主开关的控制脉冲、谐振电感Lr的电流、主电路上下桥臂的电流和电压。

图3 各器件理论波形Fig.3 Theoretical waveform of each device
为了分析方便,作以下假设:1) 所用器件均为理想器件;2) 谐振电容Cr1=Cr2;3) 换流过程中负载电流Iload保持恒定,其值等于换流时刻负载电流的瞬时值;4)输入中点电位稳定。下面对ARCP回路工作过程进行具体分析:
模 式1 [t0-t1):t0时 刻 前VT1 和VT2 关 断,由于感性负载使负载电流Iload大小方向不变,负载电流经过二极管D2流向负载,二极管D2导通使得辅助电容Cr2两端电压为0,此时可零点压(ZVS)打开VT2。
模式2 [t1-t2):辅助电路电流的变化速率被其上的辅助电感Lr所抑制,t1时VT3在零电流条件下导通,辅助电感两侧的电压为中点电位,电流逐渐增大至Iload,与负载形成回路,二极管D2支路关闭。
模式3 [t2-t3):由于中点电位的持续作用,辅助电感电流ILr增加至Ich,将Ich大于负载电流Iload的部分定义为过充电流Iboost,过充电流流经VT2。
模式4 [t3-t4):t3时利用电容维持电压的特性可使VT2零电压(ZVS)关断,辅助电感Lr与辅助电容Cr1和Cr2开始谐振,最终谐振至ucr1=0,uCr2=Vdc。
模式5 [t4-t5):uCr1=0 时反并联二极管D1自然导通,使得辅助电感Lr两侧电压大小不变方向相反,辅助电感电流Lr从Ich逐渐降低至Iload,过充电流Iboost流经D1,此时VT1可零电压开通。
模式6 [t5-t6):辅助电感上的电流ILr从Iload继续下降到0,VT1 上的电流逐渐增加至负载电流Iload。ILr降为0后,VT3可以零电流开关。
模式7 [t6-t7):负载电流全部流经VT1。
模式8 [t7-t8):辅助电容Cr1抑制了VT1 两端电压的突变,t7时VT1零电压关断。此时上下桥臂均处于关断状态,Cr1充电,Cr2放电,两者的电压逐渐交换。
模式9 [t8-t9):当ucr2=0 时,VT2 的反并联二极管D2自然导通,负载电流Iload流经D2。此时VT2电压为0,在t9时刻死区结束后VT2 可在零电压条件下导通。
在负载电流为负时,工作原理与以上分析类似,因此不再赘述。
1.3 ARCP软开关条件
根据现有的分析,在输入端电压Vdc和死区时间Td恒定的情况下,ARCP的性能主要受限于谐振周期Tr,过充电流Iboost和谐振阻抗Zr。所以ARCP电路的设计重点是选择合适的参数。
通过对ARCP 工作原理分析,发现ARCP 的正常工作需要满足2个前提:
1)在上下2 个桥臂关断t3-t5时间段内利用谐振回路使辅助电容电压VCr1增加至Vdc,VCr2降低为0。
2)在t8-t9期间,必须完成对Cr1的充电和对Cr2的放电。
因此,根据负载电流的瞬时值将控制区域分为大电流区域和小电流区域。由于小电流区域需要提前开通辅助开关管,所以将负载电流Iload能否在死区时间内完成辅助电容的充放电作为划分标准。
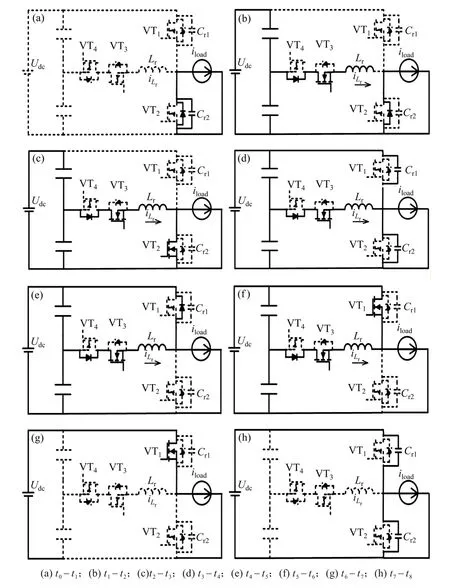
图4 各工作阶段换流等效电路Fig.4 Commutation equivalent circuit of each working stage
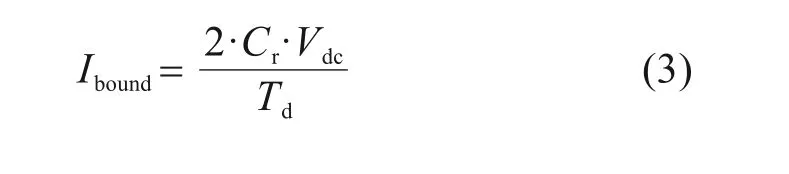
死区时间内辅助电容两端与输入电源并联,即两电容串联的电压为输入电源电压,所以可列电压方程:

电容充放电公式:

当在死区时间Td内刚好完成负载电流iload对辅助电容Cr1充电,同时对辅助电容Cr2进行放电的过程。主开关VT1漏源极两端的电压Vds1逐渐增大至Vdc,电压Vds2逐渐减小到0,结合上述2 式求得临界值为:
2 ARCP 的电流预测变量时间控制
目前,常用的辅助切换控制方法有分段定时控制和变时间控制。变时间控制方尽可能地载电流不同大小的情况下对电流进行实时采样,计算合适的辅助开关开通时间,尽可能的保持过充电流Iboost的稳定,但应用成本较高,实际应用中很少采用。本文提出了一种电流预测变量时间控制方法。通过PWM 技术,逆变电源可以实现将直流逆变为交流电,当主电路逆变控制程序确定后,逆变输出的电压频率也随之确定,尽管因负载不同电压和电流会存在一定的相位差,但两者频率相同。当输出达到稳态,只需根据电流波形两点就可推到整个电流波形,电流预测变时间控制方法就是基于这一原理实现的。较传统变时间控制相比,控制更加简单,应用成本大幅降低。
假设输出处于稳态条件下,输出电流频率为f,周期为T,幅值为Imax。电流为0 的时刻和电流幅值由传感器测量,并多次测量取平均值。则电流的时间函数为

电感充放电公式:

为了解决负载电流过小时,辅助电容Cr1和Cr2在死区时能够完成各自的充放电问题,常见的解决方法为在VT1关断之前,提前打开辅助开关VT4,此时主电路上桥臂为通路,桥臂中间节点的电压为UDC,辅助电感介于中点电位和UDC之间,VT4打开后,辅助电感电流逐渐增加,由桥臂中间节点向外流出,当VT1关断后,辅助电容的放电电流除负载电流外,还有辅助电感电流。较小的负载电流引发的死区内不能够完成充放电问题,为了保证VCr1上升到UDC,VCr2下降为0,根据式(4)和式(5)求得提前开通时间:

3 仿真结果分析
通过分别使用分段定时间控制和电流预测变时间控制对ARCP的辅助开关进行仿真。主要仿真参数列于表1,选择负载电流Iload=5.5 A,2.5 A,1.5 A和0.5 A的波形进行比较。
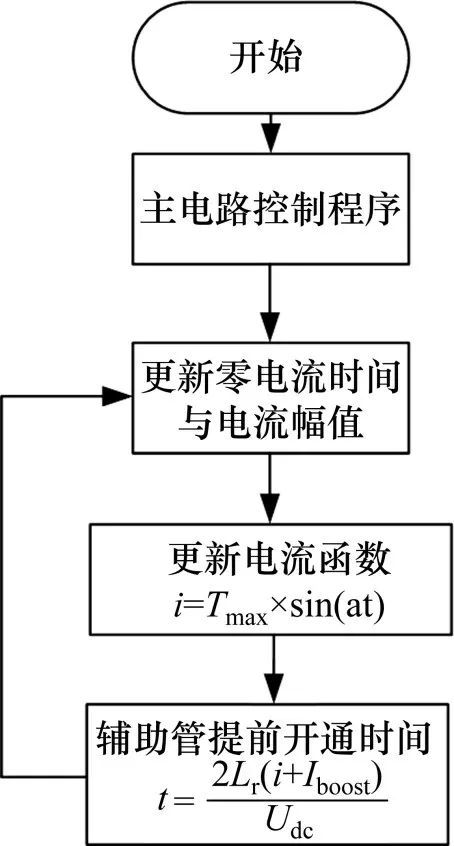
图5 电流预测变时间控制方法流程框图Fig.5 Flow chart of current prediction variable timing control

表1 仿真参数Table 1 Simulation parameters
从仿真结果中得出2种控制方式作用下的辅助电感电流和负载电流波形图。通过对图6 和图7 的对比,得出分段定时间控制下在大电流区域和小电流区域之间的辅助电感电流会出现阶梯变化,但是在各自区域内辅助电感电流几乎不会随负载电流发生变化。

图6 分段定时间控制Fig.6 Segmented fixed time control
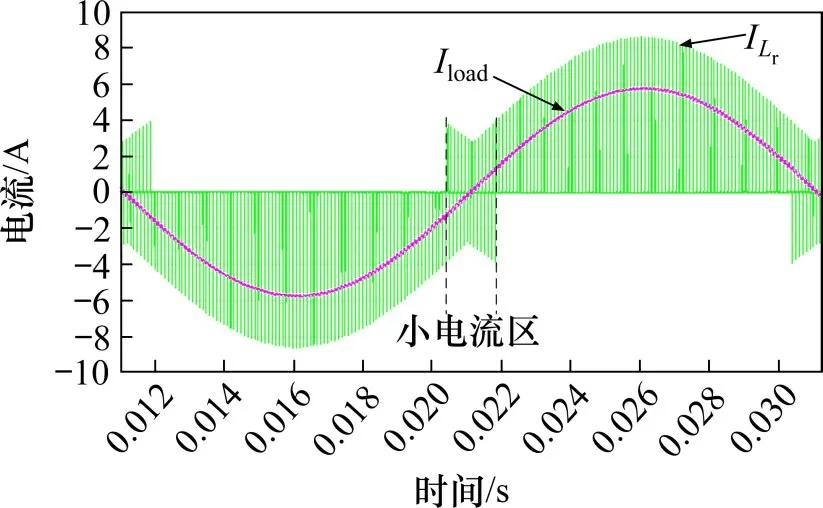
图7 电流预测变时间控制Fig.7 Current predict variable time control
而在电流预测变时间控制方式下,辅助电感电流Lr随着负载电流发生相应变化,使得辅助开关的电流应力和主开关的关断电流降低,开关损耗进一步降低。
然后,在不同的负载条件下,分析主开关电流IVT1,辅助电感电流Ir,其中VT2 的关断电流与VT1 的反并联二极管D1的导通电流大小相等,可以作为VT2关断电流的参考。
图8~11 是不同负载电流条件下辅助电感电流和主开关VT1 电压电流的波形图。当负载电流超过边界电流1.5 A 时,与分段定时控制相比,辅助电感器电流和VT1 关断电流减小,而且,随着负载电流从5.5 A 降低到2.5 A,电流预测可变时间控制方法的效果变得更加明显。
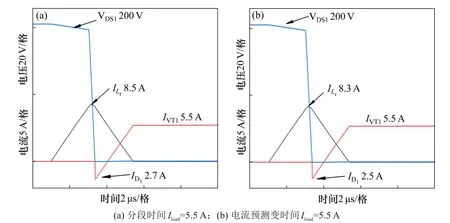
图8 5.5 A下分段定时间与电流预测控制波形对比Fig.8 Comparison of segmented fixed time and current predictive control waveform under 5.5 A

图9 2.5 A下分段定时间与电流预测控制波形对比Fig.9 Comparison of segmented fixed time and current predictive control waveform under 2.5 A

图11 0.5 A下分段定时间与电流预测控制波形对比Fig.11 Comparison of segmented fixed time and current predictive control waveform under 0.5 A
当负载电流等于边界电流时,电流预测变量时序控制的iLr和iD1与分固定时序控制的iLr和iD1之间几乎没有差异。但是,当负载电流降至边界电流以下0.5 A 时,与分固定定时控制相比,所建议控制的相关指标明显降低。从仿真中可以看出,分段定时控制在2个区域与定时控制没有变化,而电流预测可变时间控制可以实现辅助电感电流跟随整个区域的负载电流变化。
4 实验验证
4.1 实验电路
为了验证上述分析的正确性,研制了一台ARCP 逆变器硬件平台。由于三相ARCP 逆变器各相是相互独立的,所以根据单相等效电路来验证理论分析的结果,各器件的参数和型号如表2 所示,等效电路与实验平台如图12和图13所示。
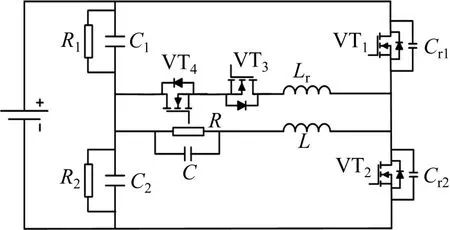
图12 单相等效电路Fig.12 Single-phase equivalent circuit

图13 电流预测变时间实验平台Fig.13 Experimental platform of current predict variable time
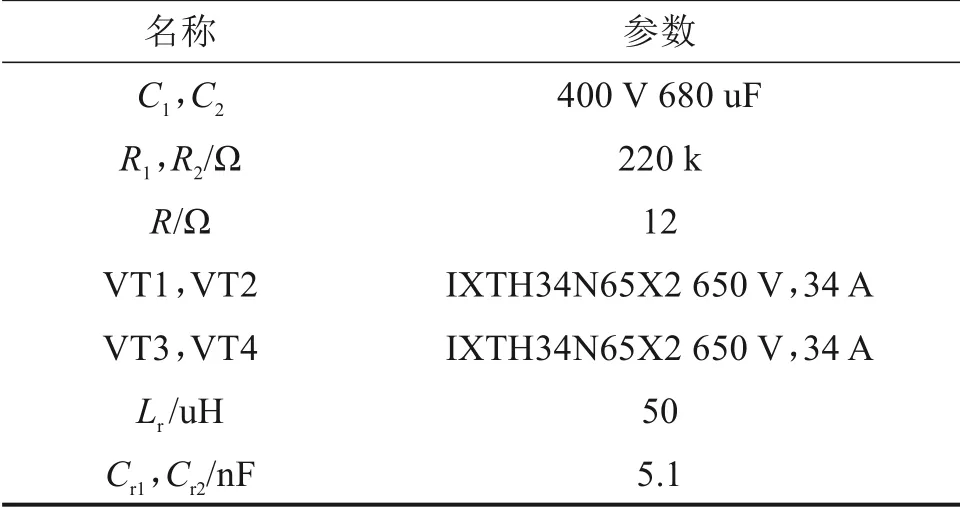
表2 器件和参数Table 2 Devices and parameters
4.2 实验结果分析
实验在分段定时间控制策略条件下负载电流和辅助电感电流的波形如图14 所示,当负载电流由小电流区跨越到大电流区,阶梯形感电流在分界处会发生阶梯型跃变,但是在各自区域内为定时间控制,辅助电感充放电时间固定,所以辅助电感电流大小几乎不变。
实验在电流预测变时间控制条件下辅助电感和负载的电流波形如图15 所示,对比图14 和图15不难发现,当采用定时间分段控制时,在同一区域内辅助电感电流相同,但是采用本文提出的方法,在图15 中,辅助电感电流呈正弦变化,开关损耗得到进一步降低。

图14 分段定时间控制Fig.14 Segmented fixed time control
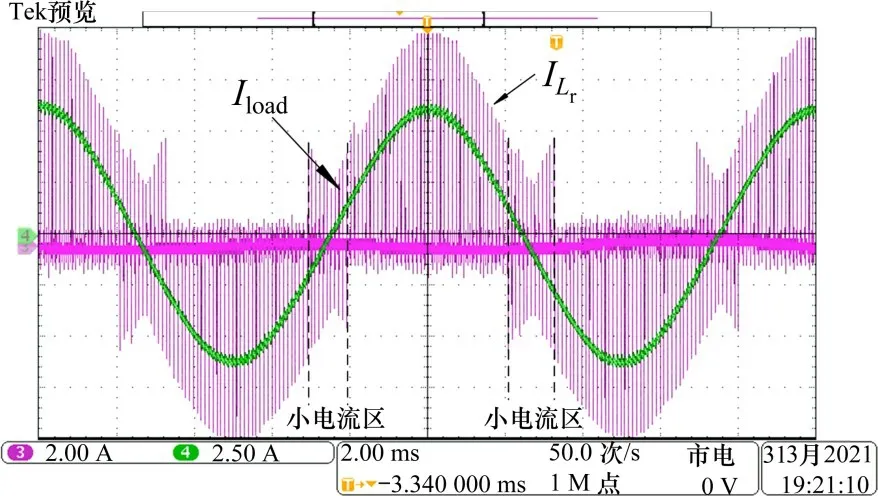
图15 电流预测变时间控制Fig.15 Current prediction variable time control
图16 ~19 是不同负载电流条件下辅助电感电流ILr与主开关电流IVT1的波形图,通过与仿真波形进行比对,如图16 所示当负载电流为5.5 A 时2 种控制策略下辅助电感电流与关断电流接近。当负载电流调整到2.5 A 时,辅助电感与关断电流波形如图17 所示,对比发现电流预测控制的辅助电感电流和反向恢复电流明显减小,开关损耗进一步降低。当负载电流调整到1.5 A 即分界电流大小时,辅助电感与关断电流波形如图18 所示,从图中发现当在电流预测控制策略下由于小电流区2种控制策略的辅助开关管开关时间均由分界电流计算,所以2种方式的辅助电感电流和关断电流都降低了。当负载电流调整到0.5 A 时,辅助电感与关断电流波形如图19 所示,分段定时间控制策略下由于负载电流的减小使得辅助电感电流和关断电流有所增加,而电流预测控制策略下明显优于前者,开关损耗明显降低。

图16 5.5 A下分段定时间与电流预测控制波形对比Fig.16 Comparison of segmented fixed time and current predictive control waveform under 5.5 A

图17 2.5 A下分段定时间与电流预测控制波形对比Fig.17 Comparison of segmented fixed time and current predictive control waveform under 2.5 A
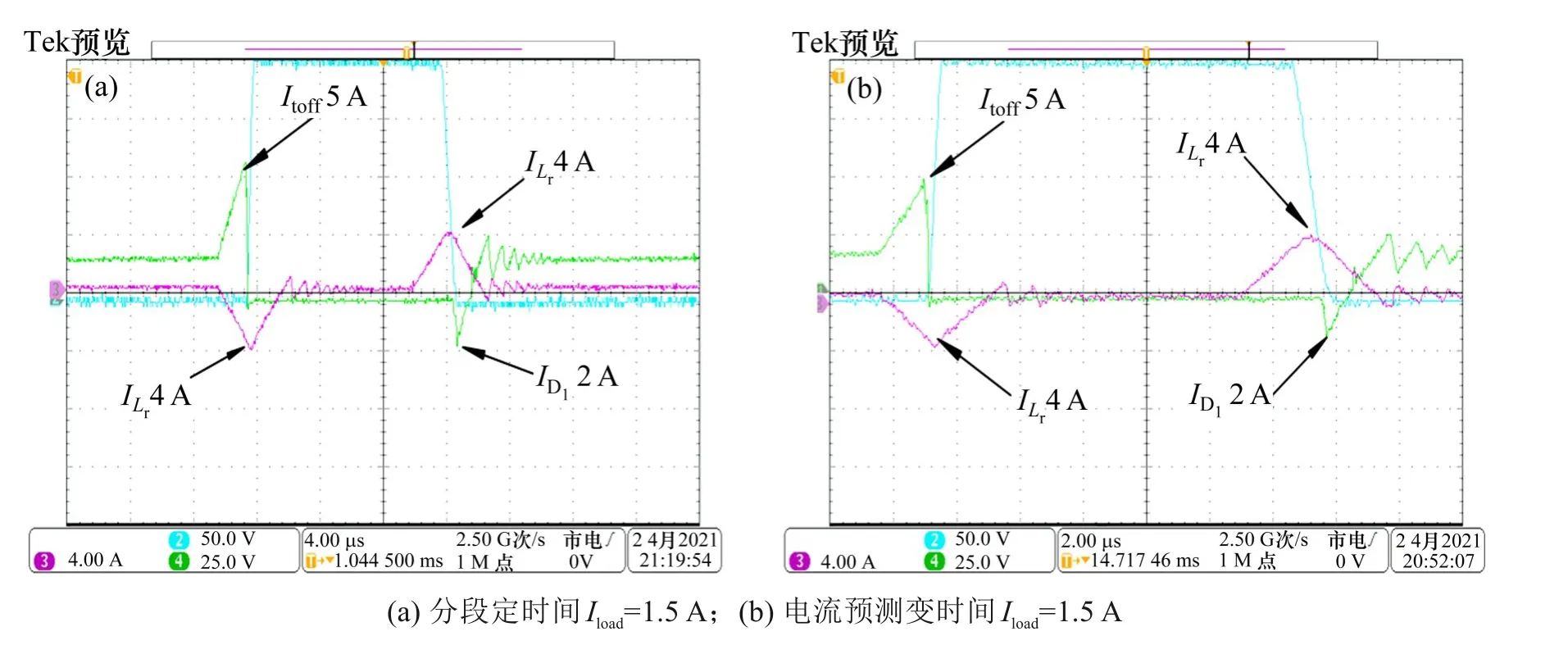
图18 1.5 A下分段定时间与电流预测控制波形对比Fig.18 Comparison of segmented fixed time and current predictive control waveform under 1.5 A
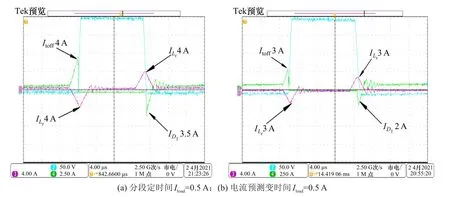
图19 0.5 A下分段定时间与电流预测控制波形对比Fig.19 Comparison of segmented fixed time and current predictive control waveform under 0.5 A
通过2种控制策略下的实验结果对比分析,电流预测变时间控制可以在确保所有负载电流大小满足软开关的基础上,较分段定时间控制方式相比,进一步减小辅助开关管的电流应力和主开关的关断电流。采用预测电流控制,不需要在每个控制周期均进行电流值采样,也避免了控制区域的划分,以及在控制区域边界附近引起的振荡。本文提出的方法控制更加简单,运算量更小,对电流传感器的精度和MCU的计算能力有所下降。
5 结论
1) 该控制方法无须改变现有控制策略,提高了开发效率,节约了开发时间。
2) 通过对电流的预测控制下有效降低了辅助回路的电流应力和开关损耗,有效提高了辅助谐振变换极(ARCP)软开关逆变器的工作效率,且运算成本低。