铁路隧道二次衬砌敲击检查声音特征分析及智能识别
2022-08-29高磊刘振奎魏晓悦张昊宇张奎
高磊,刘振奎,魏晓悦,张昊宇,张奎
(兰州交通大学 土木工程学院,甘肃 兰州 730070)
据统计,截至2020年底,我国投入运营的铁路隧道共16 798 座,总计19 630 km[1]。随着铁路交通基础设施的完善,我国由隧道建设高潮期转入运营维护期,更多的衬砌病害将暴露出来,如何快速识别、处理衬砌病害是铁路隧道运营维护的重要环节。衬砌背后空洞是铁路隧道中较为普遍的病害之一,不仅严重影响衬砌与围岩之间的相互作用,使得结构承载不均匀,导致二次衬砌产生裂缝,诱发渗漏水、钢筋腐蚀和冻害等一系列安全隐患,严重时还会发生衬砌掉块,威胁车辆安全行驶和人员生命安全[2]。经过几十年的发展,各种无损检测技术被应用到隧道检测中,目前成体系的空洞检测技术主要有:地质雷达检测技术[3]、红外热像检测技术[4]和超声波检测技术[5]等。然而先进的检测技术在检测效率、精确度以及设备检测环境要求等方面存在不足,无法广泛应用于隧道病害检查维修,人工巡检仍是隧道衬砌病害最常用的检测方法。在中国、日本、美国等国家,人工敲击检查作为隧道人工巡检的一种手段,被广泛应用于衬砌状态检查,通过检查锤敲击衬砌发出的声音初步判定混凝土密实度、衬砌内部和背后空洞的情况[6]。基于声音特征的故障、疾病诊断技术广泛应用于养殖、风电、机械等多个领域。黎煊等[7]在猪场环境下采集猪声音样本,用语音处理技术进行预处理,基于时间规整算法提取短时能量和MFCC 组成联合特征参数,构建5层深度信念网络的猪咳嗽声识别模型,实现了通过检测猪咳嗽声进行生猪养殖疾病预警;孙玉伟等[8]提取断路器合闸声音的MFCC 和GFCC,作为声音联合信号特征,通过线性判别分析(LDA)和主成分分析(PCA)进行降维后,运用改进的稀疏表示分类算法对联合倒谱系数进行学习和识别,实现断路器机械故障诊断。龙磊等[9]通过麦克风在轨道旁收集列车经过时声音信号,对声音进行多普勒畸变校正后,基于核特征矩阵联合近似对角化方法(KJADE)提取列车轨边声音信号的非线性特征参数,运用支持向量机训练模型,实现对轴承外圈、内圈、滚子故障和正常4 种状态的声学诊断;王培力等[10]收集钱塘江潮声,提取潮涌样本与非潮涌样本的MFCC 特征,建立SVM 涌潮检测模型,判断钱塘江是否发生涌潮。但是尚未有学者针对隧道敲击检查声作出特征分析和智能识别研究。因此,分析隧道敲击检查声音的信号特征,建立一种检查锤敲击声音智能识别诊断模型,对加快人工巡检效率、提高目前巡检作业的信息化程度有着重要的意义。基于此,本文实地采集铁路隧道空洞敲击检查声音音频文件,筛选出645个声音样本,通过预加重、加窗和分帧处理后,分析了有空洞与无空洞2种状态下检查锤敲击声音的时域特征和频域特征,并提取24 维Mel 频率倒谱系数作为机器学习数据集。运用主成分分析法对数据集进行降维处理,经混合粒子群算法优化的支持向量机训练后建立铁路隧道空洞敲击检查声音智能识别模型,最后将模型应用于实际铁路隧道空洞敲击检查声音识别分类,为铁路隧道空洞检查智能化作出新探索。
1 数据采集与特征分析
1.1 声音样本采集
本文研究数据采集自兰州铁路局2021年春检隧道内部,用采样频率48 kHz 的录音笔录制隧道敲击检查声音,并以“.wav”格式储存。为保证录音效果以及方便后期处理,在作业人员准备对某一部位敲击检查时开始录音,对该部分检查完毕后停止录音。采集声音文件中包含过多无空洞状态声音,需要初步对录制的声音文件进行筛选,将过多的无空洞样本音频剔除。用matlab 对音频文件进行分割处理,并对声音信号手工标注,最终得到645 个样本数据,包含空洞样本213 个,非空洞样本432个。不同状态下检查锤敲击衬砌声音在1 s内的幅度如图1和图2所示。
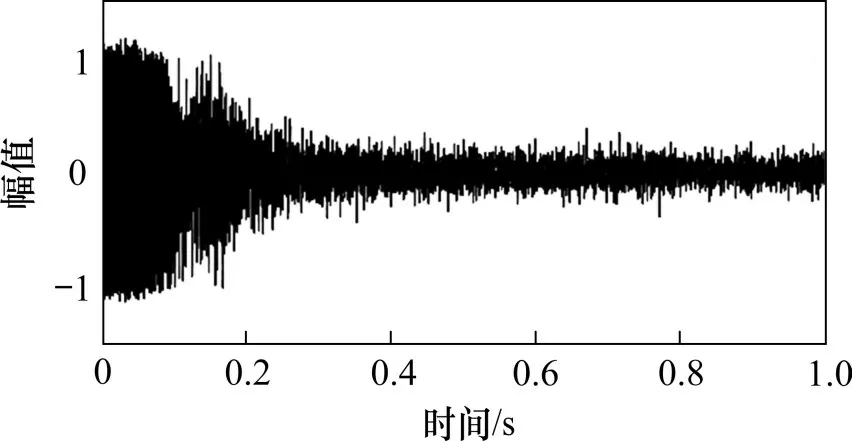
图1 无空洞状态敲击声Fig.1 Percussive sound in non-voids state
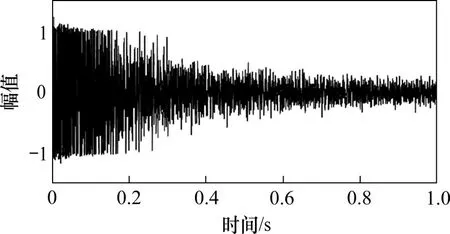
图2 有空洞状态敲击声Fig.2 Percussive sound in voids state
1.2 声音信号预处理
1.2.1 预加重
将声音信号通过一个高通滤波器,增强高频部分的声音信号。通常用到的传递函数如式(1):

其中:H(z)为传输函数;λ为预加重系数,取0.94。
预处理后结果如式(2):

其中:U(n)为预加重后的信号;u(n)为n时刻的敲击声音样本值。
1.2.2 分帧、加窗
分帧可用matlab 中enframe 函数实现,帧长K取值为256,相邻2 帧之间的重叠区域为80,加窗选取汉明窗进行处理。汉明窗如式(3)所示,加窗过程如式(4)。
其中:φ(n)为分帧后各帧的语音信号。
1.3 声音信号特征分析
1.3.1 时域特征
短时能量是一种常用的时域特征,表示语音信号能量释放强弱的特征,用于区分浊音段和清音段。短时能量如图3 和图4 所示,第j帧语音信号的短时能量可由下式得到:
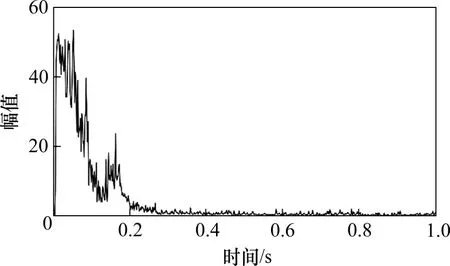
图3 无空洞状态短时能量Fig.3 Short-time energy of percussive sound in non-voids state
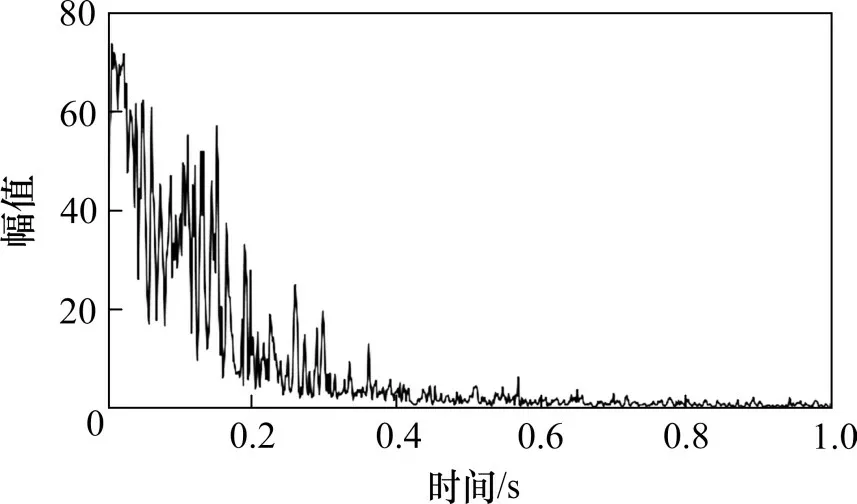
图4 有空洞状态短时能量Fig.4 Short-term energy of percussive sound in voids state

其中:Sj由式(4)得到,表示加窗分帧后第j帧的语音信号。
同一声音采用不同分帧参数或窗函数,计算出的短时能量数值会不同,同时受采集设备和声源之间距离的影响,不同距离录制的声音样本短时能量也会不同,因此无法根据短时能量具体数值区分2 种声音。但是2 种不同类型的声音短时能量的震荡幅度和时间却又有很大区别,如表1所示。
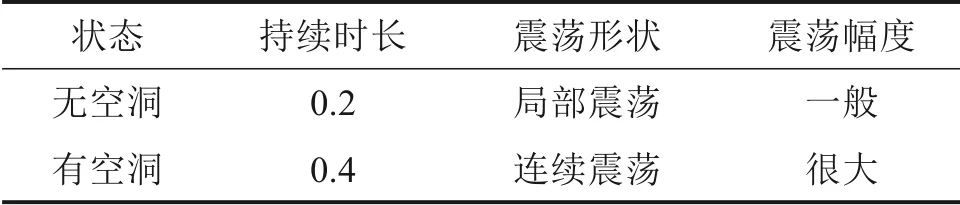
表1 短时能量特征对比Table 1 Short-time energy characteristics comparison
1.3.2 频域特征
在语音分析中,频谱分析可以用于揭示语音信号的频率分布情况[11],而频谱分析常用“声谱图”来表示。声谱图被称为“可视语音”,具有重要的实用价值,反映了信号的动态频谱特征。本文采用快速傅里叶变换(Fast Fourier Transform)进行语音信号频谱分析。FFT是一种高效的傅里叶变换算法,由于其计算量小的显著优点,在信号处理技术领域获得了广泛应用。

其中:Sj(n)为输入的语音信号,由式(4)得到;N表示傅里叶变换的点数,取默认值。
声谱图上因其不同的灰度,形成不同的纹路,称之为“声纹”,声纹因人而异,因此可以在司法、安全等场合得到应用。如图5 和图6 所示,在无空洞状态下,深黑色部位呈现“片状”分布,且在有空洞状态下呈现“条状”分布,表2 列出2种声纹特征详细对比。
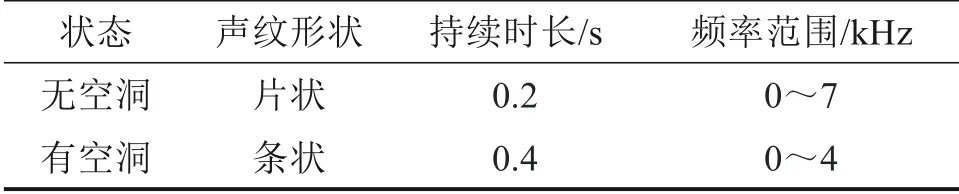
表2 声纹特征对比Table 2 Comparison of voiceprint features
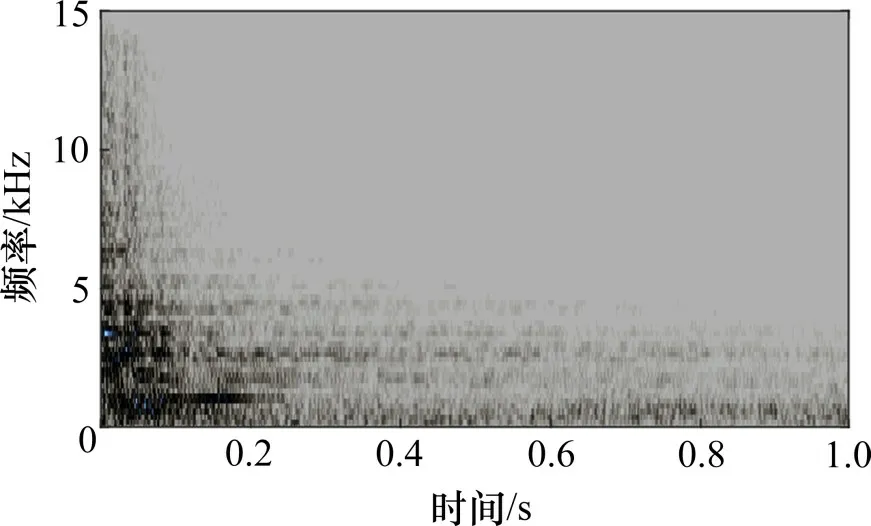
图5 无空洞状态声谱Fig.5 Sonogram in non-voids state
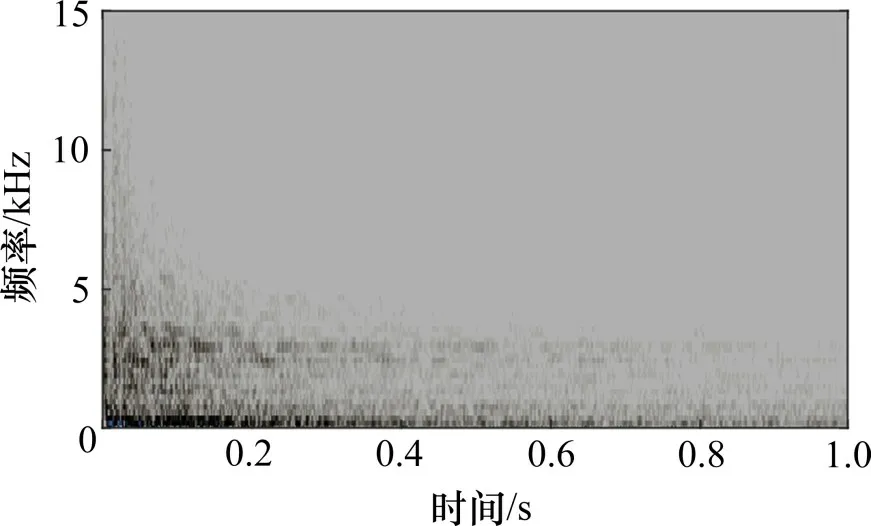
图6 有空洞状态声谱Fig.6 Sonogram in non-voids state
1.4 梅尔频率倒谱系数
梅尔频率倒谱系数[12](MFCC)是一种接近人耳听觉的基于声音频率的非线性梅尔刻度对数能量频谱的线性变换,自动语音和说话人识别中广泛使用的特征。其提取步骤如图7所示。
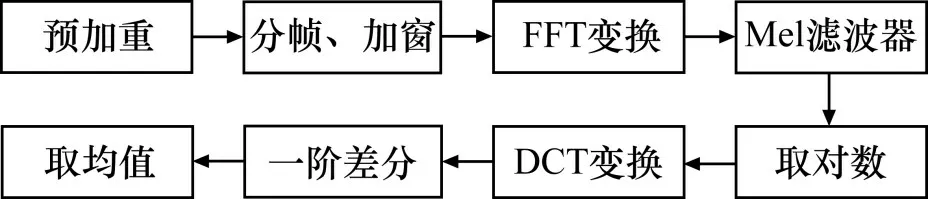
图7 MFCC提取步骤Fig.7 Extraction steps for MFCC
1) 将式(4)得到的频谱特征取模平方后通过梅尔三角滤波器式(7),并提取每个刻度上对数能量,三角滤波器的阶数L取24。
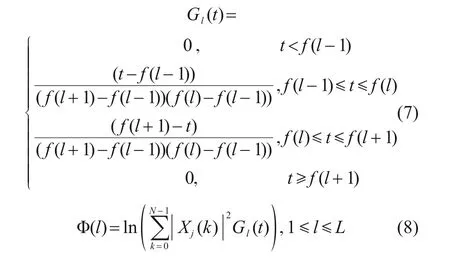
2)最后用离散余弦变换(DCT),得到12维MFCC系数C,M取值为12。

3) 对上式得到的12 维MFCC 系数C取1 阶差分,用来表示语音信号帧与帧之间的动态变化,最终将2 次得到的系数合并得到24 维MFCC 特征参数C′(12维MFCC和12维1阶差分)。
4)取均值
由于单个声音样本提取到的MFCC 特征参数C′是h×24 的矩阵(h大于2 000),需要降低特征参数的行数后才能通过智能算法进行模型训练。取均值是声音识别中常用的处理方式,将每段声音信号的MFCC 特征参数C′纵向取均值,使其变为1×24维的向量c,作为该声音特征的表示。
2 研究方法
2.1 基于自然选择的混合粒子群算法
粒子群算法(Particle Swarm Optimization)是一种根据鸟群觅食行为设计得到基于群体协作的随机搜索算法,常用于寻优或优化其他各种算法。将自然选择的原理运用到粒子群算法迭代过程中,将群体中最差的一半粒子,用最好的一半粒子代替,同时保持原来每个粒子的个体最优值,以达到加快运算速度、获取全体最优的效果[13]。
1)设置粒子速度和位置。
设D维空间个体粒子个数为N,第i个个体的位置表示如下:

第i个个体的速度表示如下。

2)寻找个体和全局极值。
将每个粒子迄今为止的最优保存为粒子的个体极值Bestp,将整个粒子群搜索到的最优位置保存为全局极值Bestg。
4)比较适应值与当前Bestp和Bestg,更新极值。
5) 对粒子群按照适应度排序,将最差的一半粒子用最好的一半粒子替换,同时保留原单个粒子迄今为止的最优值。
6) 判断是否达到停止条件,如果达到条件,输出结果;否则返回第3步继续搜索。
2.2 PCA-混合PSO-SVM算法
在机器学习领域,主成分分析法[14](PCA)常作为一种降低维度、加快机器运算速度、提高准确率的方法。其原理是通过正交变换,用一组较少综合指标,代替原来众多的指标。
SVM 分类器的原理是寻找一个最优超平面,使其尽可能远离所有类别的数据点,对于线性不可分问题,通过核映射方法将其转化为高维空间的线性可分问题,从而实现分类,本文SVM 分类器的核函数选用高斯核函数(RBF)。PSO-SVM 模型则是用粒子群优化算法对SVM 算法中RBF 核函数的最优核参数σ和惩罚因子g进行寻优,从而优化SVM 分类器。PCA-混合PSO-SVM 模型建模流程如图8所示。
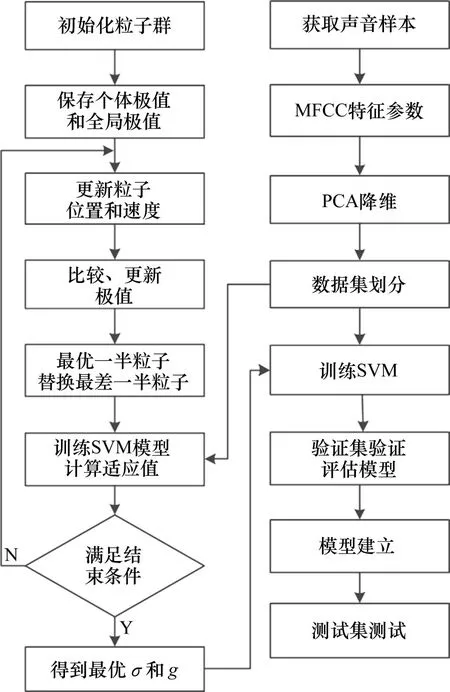
图8 智能识别模型流程图Fig.8 Flow chart of intelligent recognition model
3 工程应用
3.1 工程概况
某隧道起讫里程DK358+585~DK361+210,隧道全长2 625 m,其中暗洞长2 608 m,(ⅠⅠ级围岩1 850 m,ⅠⅠⅠ级围岩490 m,ⅠV 级围岩140 m,V级围岩128 m),明洞17 m。位于谷地高山区,山高谷深,气候恶劣。山脉呈南北向纵贯延展,谷岭相间,地势起伏跌宕最低点标高为2 065 m。隧道 为 单 线 隧 道, 线 路 纵 坡 9.0‰/15 m,10.8‰/2 550 m 和1.0‰/60 m 的单面坡,隧道位于直线上。隧道运营期间,隧道衬砌出现裂缝,部分裂缝伴有渗水病害。对该段隧道进行敲击检查,获取敲击检查声音样本,并结合该隧道之前的地质雷达检测报告,得到该段隧道空洞情况如表3。
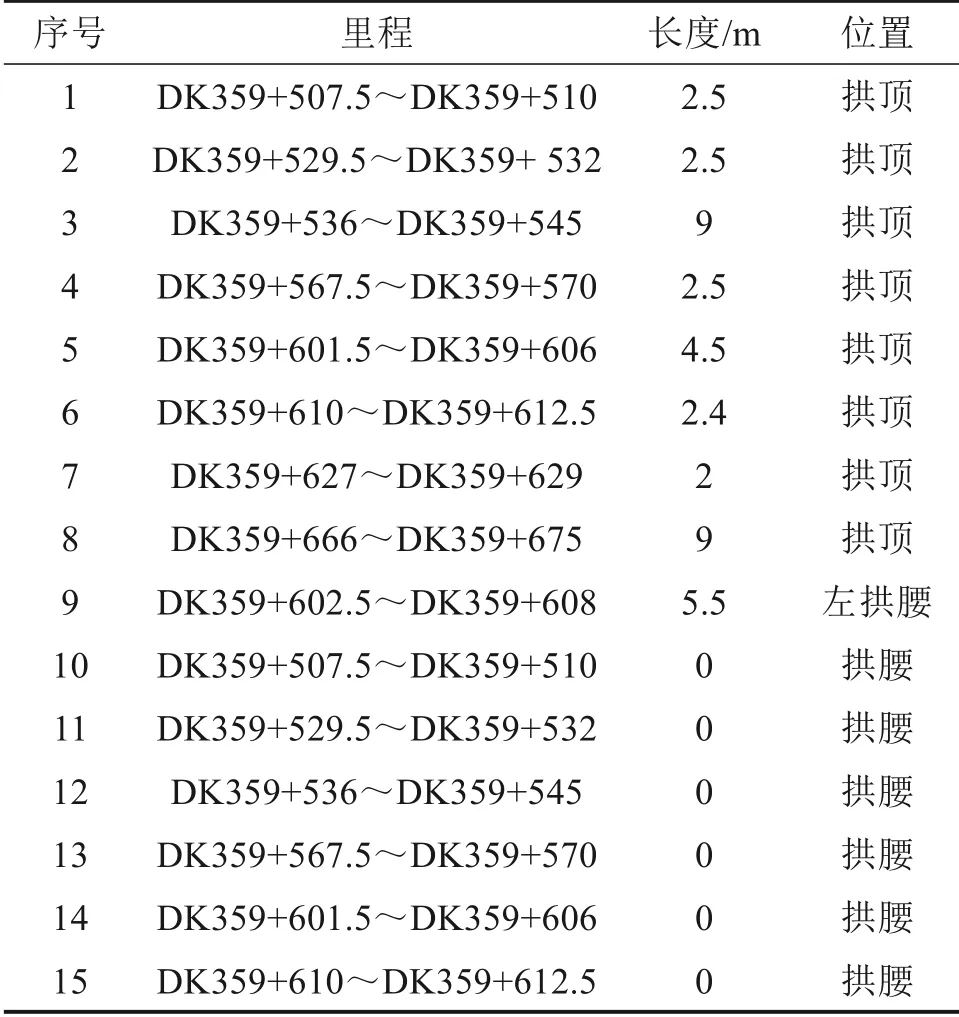
表3 实际空洞情况Table 3 Actual voids situation
3.2 声音识别模型建立
本文所建立的空洞敲击检查声音模型是基于MATLAB2019B软件建立,建模过程如下。
1) 数据集PCA降维
将1.1 中收集到的645 个声音样本(空洞样本213 个,非空洞样本432 个)和3.1 实际工程案例中取得的15 个声音样本(空洞样本9 个,非空洞样本6 个)提取MFCC 参数,取均值后得到每段声音的特征向量ci(1≤i≤660)。所有特征向量ci共同组成数据集T660×24,作为本文所需的样本数据集。运用主成分分析法降维,各个维度的主成分贡献率如图9所示。一般地,当各维度特征值累计贡献率达到85%以上,就说明主成分分析后的特征包含了大部分主要信息,如图9,前15个主成分的累计贡献率已达到91.63%,柱状图中特征值从第16 个因子开始以后逐渐趋于水平。由此,取主成分分析后得分矩阵的前15 维,组成最终样本数据集U660×15。模型的输出用“0”和“1”分别表示衬砌背后“无空洞”和“有空洞”。
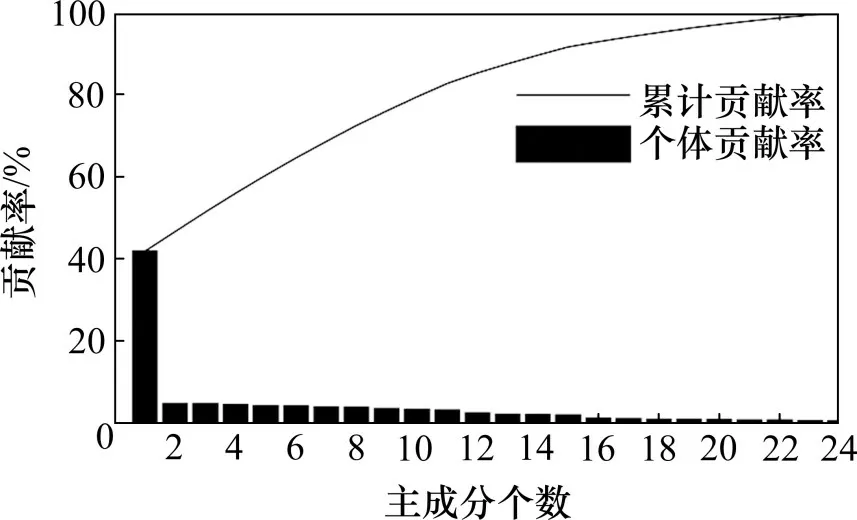
图9 特征贡献率Fig.9 Contribution of features
2) 样本分割
根据机器学习数据集划分方式,将样本划分为训练集、验证集和测试集,训练集用于训练智能分类模型,验证集用于调整模型参数和评估模型的分类效果,测试集一般选用实际工程样本,用来评估模型的泛化能力,是对模型的测试和“考核”。将春检645个声音样本的MFCC 特征和主成分分析后的样本数据按4∶1 的比例划分训练集U1516×15和验证集U2129×15,将实际工程案例中取得的15个样本的PCA数据作为测试集U315×15。
3) 模型训练
将训练集U1516×15按照图8 所示流程用于模型训练。PCA-混合PSO-SVM 模型参数设置为:学习因子c1=0.4,c2=0.9,惯性权重η=0.8,初始种群数目N=100,最大迭代次数M=100。粒子群算法适应度函数用均方误差函数表示:

其中:为第i个样本的SVM输出值;Yi为第i个样本的理论输出值。
4) 模型性能对比
常见的分类性能度量指标有准确率(Accuracy)、查准率(Precision)、查全率(Recall)和综合评价指标F1 度量(F1-Score)[15]。对训练好的PCA-混合PSOSVM 模型进行5 折交叉验证,得出模型综合性能,并与PSO-SVM 和普通SVM 进行对比,对比结果如表4 所示。本文模型各方面性能均略高于PSOSVM,且远高于普通SVM 模型;本文模型训练时间只有PSO-RBF 训练时间的一半,说明本文模型耗时短且具有良好的分类性能。
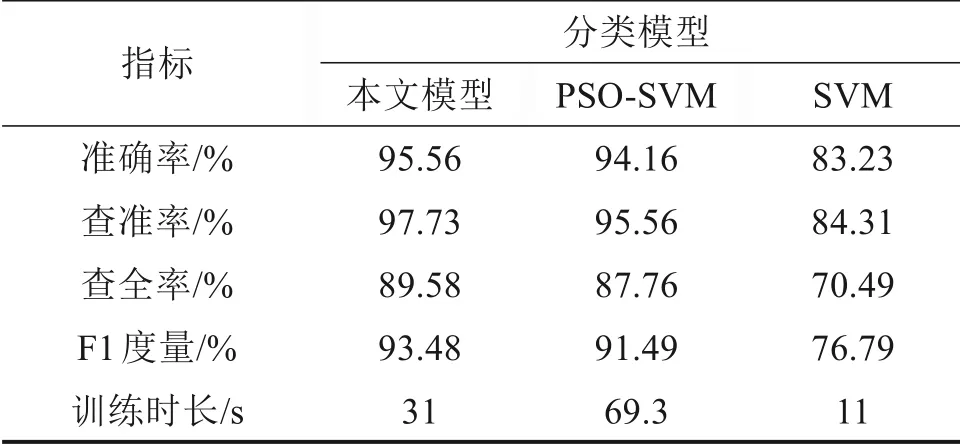
表4 模型性能对比Table 4 Model performance comparison
3.3 实例测试结果与讨论
测试集U315×15为实际工程中收集的声音的特征集,用于测试模型的实用性,测试结果如表5。本文模型能够在实际应用中准确地对所有声音样本进行分类;PSO-SVM 模型在识别第7 个样本时出现错误,说明PSO-SVM 模型在识别空洞敲击声音时效果较差;普通SVM 模型对其中4 个样本作出错误的判断,效果不理想。
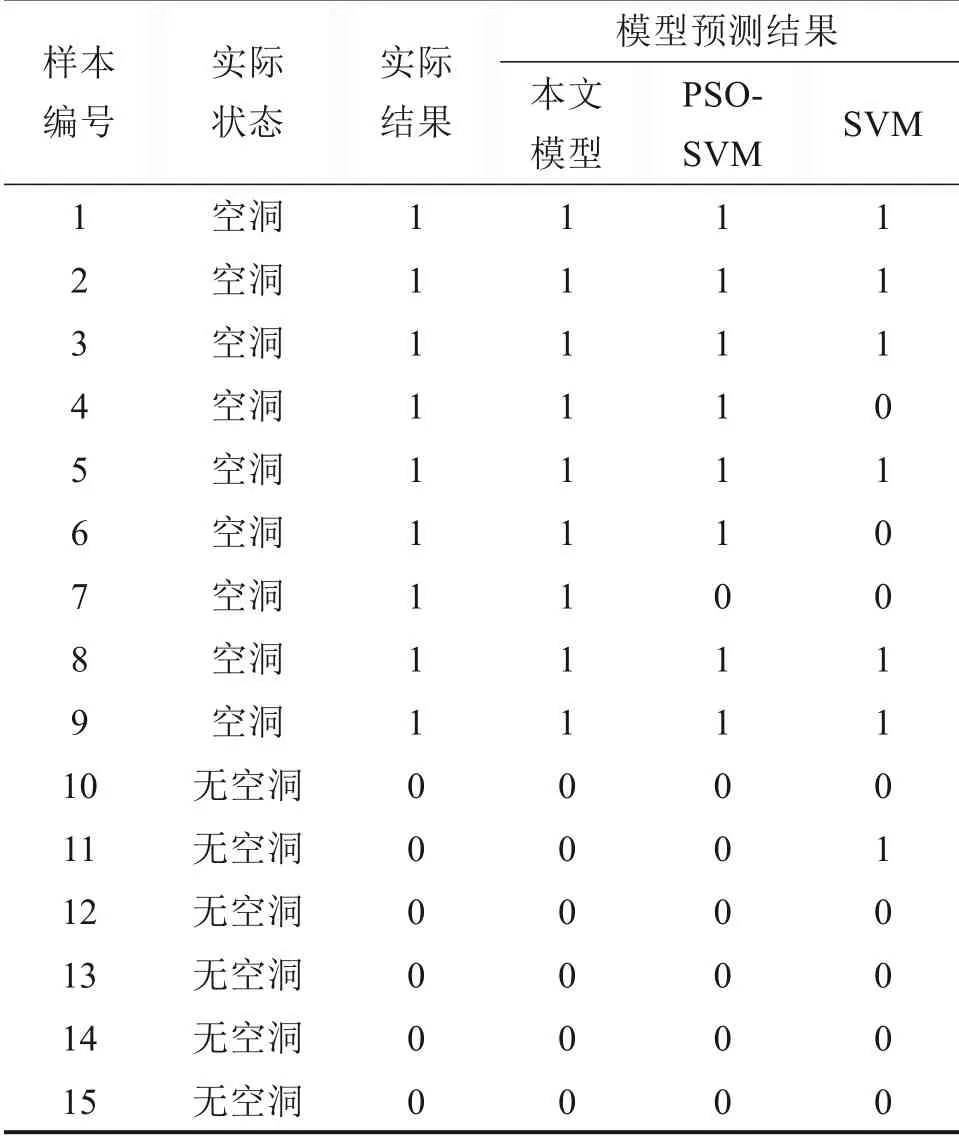
表5 实例验证对比Table 5 Verification and comparison of examples
4 结论
1)在采集隧道检查过程中检查锤敲击声音后,运用声音信号特征分析基本方法,对2种状态下声音样本的时域特征和频域特征进行分析,并提取MFCC特征参数。在不同状态下短时能量和声纹都表现出明显的不同。
2) 通过主成分分析法对数据集进行降维,用混合PSO 算法优化SVM 的核函数参数σ和惩罚因子g,建立PCA-混合PSO-SVM模型,与普通PSOSVM 算法和传统SVM 算法而言,本文模型有着较高的准确率和较快的训练速度,能够根据敲击检查声音准确判断出隧道背后是否存在空洞。如何根据声音特征判断衬砌背后空洞的大小和深度等,是下一步研究的重点。
3) 目前铁路隧道快速无损检测还无法大范围普及,人工检查仍是使用最广泛的检查方法,通过研究敲击检查声音智能识别,为隧道智能化诊断做出新探索,对加快人工检查速度、提高信息化程度和实现无纸化作业有着重要的意义。