动态逆反馈控制框架下直接升力控制的控制分配研究
2022-08-26罗飞张军红耿延升吕鹏飞
罗飞,张军红,2,耿延升,2,吕鹏飞
1.航空工业第一飞机设计研究院,陕西 西安 710089
2.西北工业大学,陕西 西安 710089
目前,各类逆反馈控制方法广泛应用于先进飞行器控制器设计中[1-3],相比于传统状态反馈与增益调节的飞行控制设计,由于动态逆反馈解耦机体动力学中长周期与短周期的特性[4],使得这类飞行控制方法通常能够实现基本飞行操作的同时,可以充分利用飞机其他辅助舵面的潜力,完成一些特定的飞行机动[5],如应用直接力实现精确航迹控制[6-7]、地形跟踪/地面突防、自主加油对接等。尤其是面对飞机精确进场着舰控制,使用直接升力可以大幅提高飞机着舰精度和降低着舰控制复杂度,从而整体性改善舰载机与航母的作战匹配性,提高航母立体作战能力[8]。
由于引入多个辅助舵面从而形成冗余控制,因此逆反馈控制框架中通常需要设计执行机构控制分配模块,以实现特定的飞行机动。利用非线性动态逆(nonlinear dynamics inversion,NDI)反馈控制方法设计的姿态回路的控制方法已经经过各类飞行器仿真、测试、试飞验证,较为成熟[9-13]。但在航迹回路上,飞行器动力学方程不能直接表达为仿射非线性系统,虽然能够设计逆反馈控制器,具体设计较为少见[14-15]。而常见的控制分配是在传统飞行控制框架下实现对舵面的合理分配,并没有研究在航迹回路与姿态回路两层动态逆反馈控制框架下,分析与之相对应的控制分配技术。参考文献[16]研究了利用动态控制分配实现直接升力控制(direct lift control, DLC),提出利用动态控制分配结构处理直接升力舵面的分配,达到利用直接升力抑制外部扰动的影响,相比于常规控制分配方法[5],舵面响应功率更低,经济性更好。但动态控制分配并没有在动态逆反馈控制框架上实现。参考文献[17]利用特征结构配置反馈方式解耦飞机纵向长短周期状态响应,同时增加控制分配模块处理几个可以产生直接升力的舵面,从而达到直接升力面操纵航迹的目的。但特征结构配置本质上还是基于终值方程的静态解耦,与通过状态反馈和增益调参设计直接升力控制[18]类似,无法真正达到直接升力的动态解耦。
本文聚焦直接升力精确航迹控制,研究动态逆反馈控制框架下的控制分配技术。在前期设计的航迹回路直接升力逆反馈控制器的基础上[6-7,19-20],研究与之相适应的控制分配方法。
1 直接升力控制分配分析
本文以某预警机模型为仿真对象进行仿真分析。首先定义后缘襟翼+襟副翼联合体为直接升力面。通常襟翼与襟副翼作为机体控制面常用于更改飞机构型,满足飞机在起飞、巡航、着陆/着舰阶段对升阻比的要求。而对于需要执行特定任务的飞机而言,只是简单地将襟翼静态地放置在固定位置而不去充分利用潜在的舵面效率,使飞机丧失了部分固有能力。然后定义允许控制集(Ω),对于m个控制执行机构,这个允许控制集是一个m维棱正交多胞形,本文仿真模型主要增加襟翼与襟副翼作为直接升力面动态偏转,增加推力用于稳定飞行速度,具体定义见表1。如图1所示,通过直接控制分配算法,分别求解出常规操纵执行机构(副翼、升降舵、方向舵)与增加直接升力面、推力的可达力矩集(Φ)和可达力集(Π)。
增加直接升力面与油门推力之后,直接升力面对于力矩空间的改变量很小,力矩空间基本不变,飞行器力矩可能不可达[21],而直接力显著改变力空间,在垂直方向有显著改善。推力在力矩和力空间均有明显的效果,推力显著增大了俯仰操纵力矩和机体轴前向直接力。
2 基于动态逆框架的直接升力航迹控制
2.1 整体控制框架
首先在前期研究过程中,因为通过前馈或者状态反馈设计的直接升力控制无法达到动态解耦的特性,因此在短周期回路和长周期回路分别设计了逆反馈控制回路。具体是分别利用非线性动态逆(NDI)和增量非线性动态逆(INDI)控制方法设计了航迹回路的直接升力逆反馈控制,用于飞机精确着舰控制。如图2 所示,机体航迹、速度等线运动对应于外部动态逆慢回路,是动态逆飞行控制中有关力方程的设计部分。此时设计控制状态为表示机体飞行速度,航迹倾角和航迹偏角的[V γ χ]T,通过航迹参考模型求解出控制变量的动态信息,叠加上稳定速度的发动机输入动态信息,逆向反馈机体本体动态,得到输入至控制分配模块中的期望操纵的力分量。而内部快回路对应机体三轴姿态控制,是动态逆飞行控制有关力矩方程的设计部分,控制变量为表示姿态的三个欧拉角[φ θ φ]T,在切入航迹操纵模态时,将姿态指令设置为姿态固定值,姿态指令信号通过外环P(I)控制器得到三轴角速率信息,然后通过姿态参考模型得到三轴角速率动态信息,逆向反馈机体本体动态,得到输入到控制分配中期望的用于稳定姿态的力矩信息。
除了主要的两层动态逆回路用于实现解耦的直接力控制,还有在动态逆框架上设计的控制分配模块以及相应的机载气动模块(OBAC)以及用于INDI 控制的传感器模块。其中对于机载气动模块,设计控制方案应用于特定飞行包线,此时飞机的飞行高度变化范围、重量、飞行速度以及姿态保持相对稳定,所以可以认为机载气动数据稳定,将常规非线性气动计算模块线性化处理,得到建模飞机全量六自由度非线性模型的航迹回路系统矩阵以及控制矩阵,分别用于动态逆向反馈动态的计算以及用于控制分配中的控制有效性矩阵的计算。
以上设计的飞机精确航迹控制,仿真结果表明将直接力引入非线性动态逆/增量非线性动态逆控制框架中,保证实现航迹调节和姿态稳定的解耦控制的同时,由于直接升力的引入,使得飞行员可以通过直接升力面,快速调节航迹倾角修正下滑航迹误差,保证INDI/NDI+DLC的控制架构可以用于抑制气流干扰。同时由于这种完全解耦的设计方法,使得飞行员的杆指令直接线性对应航迹误差,实现在控制律软件设计阶段解耦,简化操纵逻辑,减轻飞行员操纵负担的目的。
2.2 控制分配框架
从整体动态逆反馈控制回路中可以得到航迹回路与姿态回路的控制量,经过控制分配模块得到相应的执行机构的作动量。由于采用的控制框架为逆反馈的控制框架,存在不同控制量更新的速率不一致、增加了直接升力面、推力等其他辅助执行机构等问题,因此需要研究在这种控制架构下使用哪一种控制架构,控制算法才能获得最佳的控制效果。对于基于动态逆框架的直接升力航迹控制而言,本节提出以下两种控制框架,并针对不同控制框架,研究不同控制算法的效果。
(1)控制分配结构1
分别在航迹回路和姿态回路采用控制分配模块,航迹回路控制分配模块主要将航迹控制量通过控制分配算法映射到对应的辅助舵面作动量上,而姿态回路控制分配模块主要将姿态控制量通过控制分配算法映射到常规的方向舵、副翼、升降舵作动量上。具体结构如图3所示。

图3 控制分配结构1图示Fig.3 The diagram of control allocation structure 1
航迹回路的控制有效性矩阵符合式(1)表达约束。
式中:Gf为直接升力面δf与推力ΔT对应的三轴直接力(Fx Fy Fz)T控制有效性矩阵,Gm为常规舵面(δaδeδr)T对应的三轴力矩控制有效性矩阵。
(2)控制分配结构2
在得到航迹与姿态回路的控制量之后,整体通过一个联合控制分配模块,映射得到对应的执行机构作动量,如图4所示。航迹回路的控制有效性矩阵符合式(2)表达约束。

图4 控制分配结构2图示Fig.4 The diagram of control allocation structure 2
通过以上两种不同控制分配结构以及不同的控制分配算法,分析论证基于动态逆反馈控制框架的直接升力航迹控制与姿态控制,主要分析在姿态回路与航迹回路分别进行控制分配设计,如控制分配结构1,这种物理隔离的非联合控制分配结构是否能够适合两层并联逆反馈控制回路。同时分析采用航迹回路与姿态回路逆反馈回路所有控制量与所有控制执行机构联合控制分配结构,如控制分配结构2,是否影响按照“时标分离”工程假设设计出来的动态逆反馈直接升力控制效果。
3 直接升力控制分配算法
为了实现逆反馈控制框架直接升力控制中合理处理直接升力面、推力等辅助执行机构与常规姿态调节舵面(升降舵、副翼、方向舵),本文分别利用直接分配、加权伪逆、线性规划等方法分别适用于在逆反馈控制框架中直接升力控制的控制分配算法。
(1)直接分配
本文使用直接分配主要用于与其他控制分配算法进行对比。直接分配将执行结构按照操纵自由度绘制高维度允许控制集Ω,按照控制有效性矩阵线性映射得到可达力矩空间AMS 或可达力矩空间子集Φ,建立两者坐标空间的几何关系,然后根据期望力矩mdes在可达力矩空间子集Φ的几何坐标关系确定最优的坐标位置,最后依据控制分配算法反求得允许控制集Ω中唯一对应的执行机构操纵矢量u。
(2)广义逆方法
广义逆方法主要包括伪逆法、加权伪逆法和再分配伪逆法等。本文使用加权伪逆控制分配,它的基本思想是在控制无约束的情况下,对期望控制力矩的广义逆求解。其中加权矩阵W的设计,可以对控制执行机构的优先级做一些规定或者约束,减缓指定翼面的饱和或者分担指定翼面的任务。具体定义如式(3)所示

典型的对角项可以定义为如下形式

得到加权的伪逆为

伪逆法的特点在于各个控制量都参与控制,可以延缓气动操纵面和推力矢量控制到达饱和的时间,减小气动操纵面总的偏转量。其缺点在于不能设计操纵面偏转位置和偏转速率饱和的限制,所以不能避免操纵面出现饱和的情况,而且可能导致因操纵面饱和而使得飞机达不到最大可用力矩。
(3)线性规划
线性规划时,利用最优化的方法,求解执行机构运动量函数J(u)的最优值。在目标代价函数的设计中,利用直接升力进行航迹操纵时,优先考虑使用直接升力面与升降舵,而避免与横航向相关舵面的作动。
将不同策略的控制分配写为线性规划的形式,本文采用以下两种形式。首先是方向保持策略。假定期望的操纵量mdes超出了可达力矩集Φ,通过比例缩小期望操纵力矩而使得期望操纵力矩落到可达力矩的边界∂(Φ),达到方向保持的效果,如式(6)所示。

利用线性规划的方式使得λ最大,标准表示为如下形式
其次是误差最小化,对于每个执行机构而言,限制每个执行机构上的期望力矩mdesi与实际产生力矩yi=Briu的误差,得到以下优化函数

更一般地表达为

通过设计加权矩阵Wd的系数,可以优先保证某些轴的误差更加显著,从而在代价函数计算过程中,使得某些轴的误差更加趋于零。对于线性规划问题,在工程中选择l1范数或者l∞范数。
4 仿真结果
4.1 逆反馈控制框架直接升力控制效果
采用上文表明的控制分配1,航迹回路与姿态回路控制算法都采用加权伪逆,仿真得到的控制效果如图5 所示。图中γ-c为下滑航迹倾角指令,γ-dot为下滑航迹倾角动态导数,θ-c俯仰角指令,Q_dot为俯仰角速率动态导数,H为飞行高度。
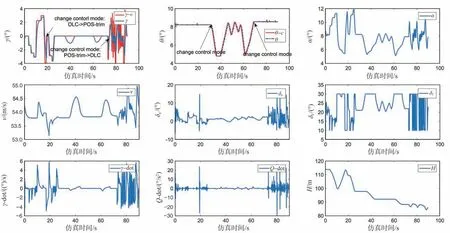
图5 利用控制分配结构1和加权伪逆控制分配算法求解出的逆反馈控制框架状态响应Fig.5 The state response of inversion feedback control framework with control allocation structure 1 and weighted seudo-inverse control allocation algorithm
图中DLC表示利用直接升力直接操纵航迹下滑倾角,POS-Trim 表示逆反馈控制框架下的姿态回路操纵。从仿真结果来看,飞行员操纵方式在前20s是直接升力模式,此时航迹下滑倾角γ跟随指令作动,俯仰角保持稳定,实现了直接升力垂直速度控制模态。当飞行员操纵模式在20s时切入姿态操纵时,可以看到俯仰姿态θ从8°左右追踪指令到5°左右,之后跟踪响应较好,但在操纵姿态时,航迹会发生显著的波动,之后趋于起始稳定值。在70s附近从姿态操纵切入航迹直接升力操纵时,快速作动航迹操纵指令,相应的下滑倾角γ同步直接作动,没有操纵延迟与操纵反效等不良特性,达到了利用直接升力快速作动的目的。
但从仿真结果中可以看出,由于在控制系统设计过程中,简单采用了加权伪逆控制分配算法,并没有在航迹回路与姿态回路同时为逆反馈控制结构时,有针对性地设计与之相适应的控制分配结构和算法。从仿真结果中的升降舵响应δe和直接升力面响应δf可以看出,在作动过程中,升降舵等常规舵面明显存在突刺,或者超出偏转极限位置的作动。鉴于以上问题,在控制分配过程中,应该结合直接升力控制要求,在控制分配过程中,优先使用直接升力面与升降舵,其次增加补偿推力模块,保证着舰下滑速度稳定。
4.2 控制分配结构仿真
利用相同的加权伪逆控制分配算法进行直接升力操纵仿真,选择不同的控制分配结构,仿真结果如图6、图7 所示。保证除控制分配结构以外其他控制参数不变的情况下,进行航迹直接升力操纵,在完成航迹操纵效果的同时,相应的舵面响应有显著的差异,采用联合控制分配结构2的舵面响应明显作动频率增加。将以上差异按照功率谱计算公式(10)进行离散计算,得到舵面响应的功率谱,可以看出控制分配结构2 虽然能够达到控制效果,但是作动器的功率谱在高频的量值增大,对于控制分配和作动器响应来说,是不利的。
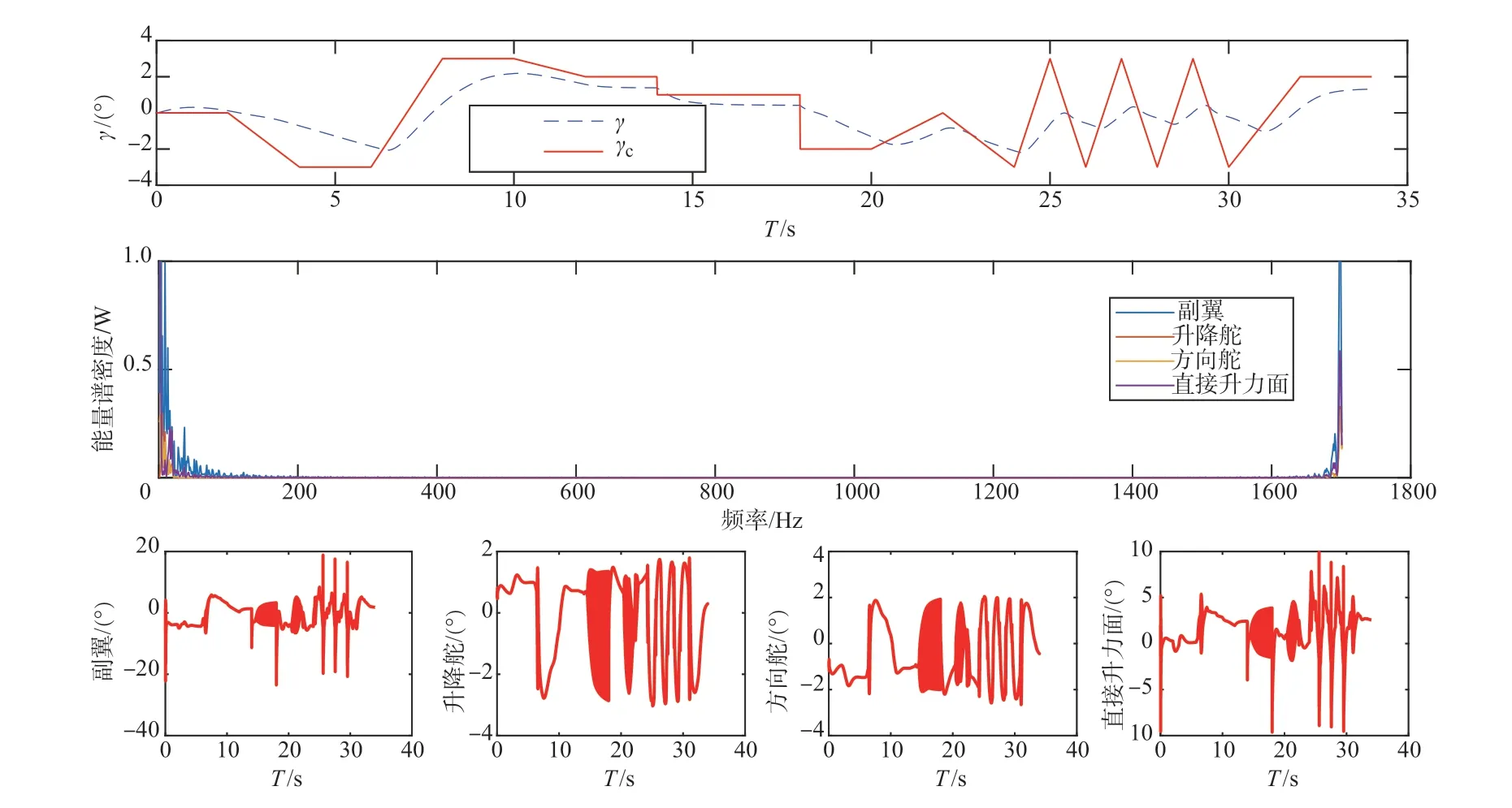
图6 利用控制分配结构2和加权伪逆控制分配算法的航迹操纵响应Fig.6 Track manipulation response with control allocation structure 2 and weighted pseudo-inverse control allocation algorithm
图7 利用控制分配结构1和加权伪逆控制分配算法的航迹操纵响应Fig.7 Track manipulation response with control allocation structure 1 and weighted pseudo-inverse control allocation algorithm

同理,按照上节设计的线性规划控制分配算法,分别进行两种控制分配结构的仿真,如图8 、图9 所示。可以看出,采用控制分配结构2 的线性规划控制分配辅助直接升力舵面与常规操纵舵面,相比于采用控制分配结构1而言,舵面响应的功率谱在高频有分布,表征为舵面响应的经济性差,对操纵能量的需求较高。其次可以看出航迹下滑倾角的操纵变差。
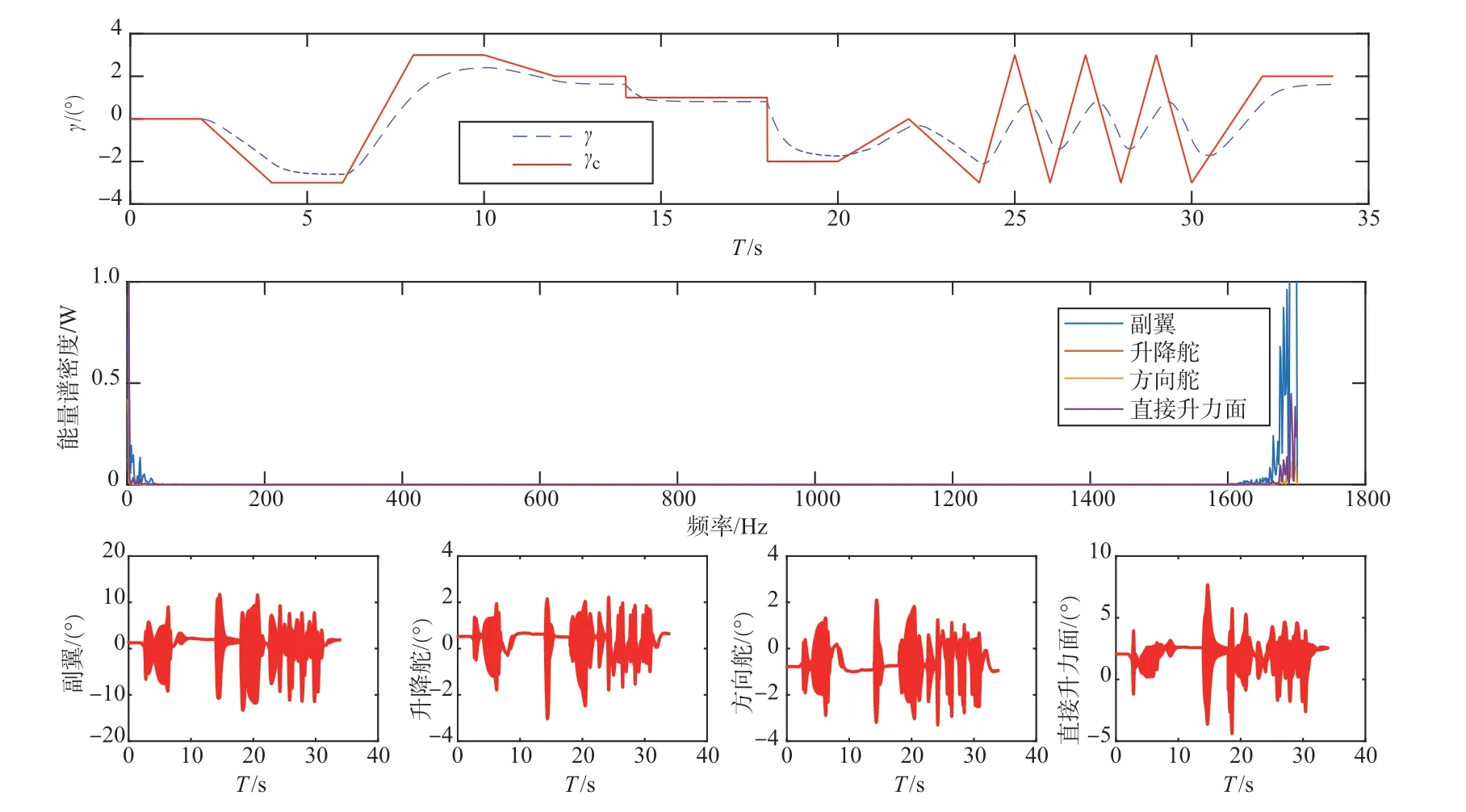
图8 利用控制分配结构2和线性规划控制分配算法的航迹操纵响应Fig.8 Track manipulation response with control allocation structure 2 and linear programming control allocation algorithm
图9 利用控制分配结构2和线性规划控制分配算法的航迹操纵响应Fig.9 Track manipulation response with control allocation structure 2 and linear programming control allocation algorithm
一般而言,在飞行控制工程设计过程中采用动态逆反馈控制,主要利用“时标分离”理论进行直接设计,将控制状态按照飞行器动力学的一般特性,从快到慢依次隔离开来。通常姿态角速率响应快于外环的姿态角,同时主要体现飞行器短周期特性的姿态回路略快于体现长周期的航迹回路。虽然以上理论缺乏严格的数学证明[22-23],但是很多已有的动态逆反馈控制器的工程设计正是基于“时标分离”理论,表明在工程设计过程中,对高阶不稳定项没有逆反馈消除是可接受的。从以上分析可知,直接升力航迹控制的逆反馈控制回路相比于姿态保持的逆反馈控制回路,更新速率更慢。把直接升力面这类在逆反馈控制框架中直接与航迹对应的控制面与姿态回路分离开来,姿态回路单独设计控制分配模块,从而实现直接升力面与常规舵面的不同速率更新,保证直接升力操纵诱发的扰动被常规操纵舵面,主要是升降舵快速消除掉,从而实现动态逆反馈控制回路直接升力的动态解耦控制。
4.3 控制分配算法仿真
控制分配算法采用加权伪逆时,按照前节所述,通过调节加权伪逆的权值系数就可以达到抑制和控制相应舵面的作动量,从而可以为飞机特定机动设计相应舵面作动优先级的目的。首先利用控制分配结构1,通过改变加权伪逆控制分配算法进行仿真研究。由于在直接升力航迹下滑倾角操纵时,主要使用到直接升力面与升降舵之间的对应动态作动,而减少甚至避免副翼以及方向舵的作动。调节姿态回路的加权伪逆对角矩阵的权值从W=[1 1 1]T到W=[10 0.1 10]T,仿真结果如图10所示,可以看出两者舵面响应基本没有任何变化。
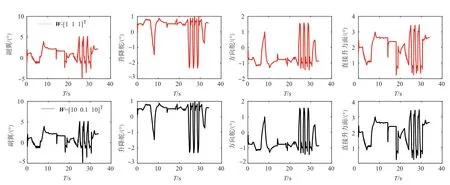
图10 调整加权伪逆权值求解得到的舵面响应Fig.10 The response of the control surfaces by the adjustment of weight value with weighted pseudo-inverse control allocation algorithm
因为加权2范数只是最小化向量范数无穷多个闭合形式逆的一种,是最小化uTWTWu,通过设置对角阵实现不同执行机构的控制限制。按照伪逆求解方式,对于控制分配而言,通过伪逆P求解出的解up满足约束条件m=Bu,所以

因此满足以下方程

由于up在[PB-Im]的零空间中,经推导得到[PB-Im]的秩为m-n维,而本文姿态回路的控制量为m= 3,它的解是固定的,最优化问题退化为确定解的求解问题。因此直到姿态回路是冗余控制的时候,这种逆反馈控制框架设计的姿态回路控制分配才能通过加权矩阵调节舵面作动优先级。同时通过联合控制分配结构2仿真结论与非联合控制分配结构1结论一致。
利用线性控制规划控制分配算法调节优化函数的权重系数,达到对控制状态误差和舵面操纵优先级的有效分配。但是由于本次仿真模型使用的执行机构不够,在姿态回路无法构成冗余操纵,从而使得调整权重系数之后两次仿真结果一致,并且采用控制分配结构1与控制分配结构2的仿真结果也一致。
经过以上分析,相比于一般只在姿态回路利用动态逆反馈控制,在航迹回路设计动态逆反馈控制,实现航迹直接升力控制,此时在这种控制框架下,采用控制分配结构1具有更好的舵面响应特性和控制效果。
5 结论
在动态逆控制框架下实现直接升力控制的技术,可以广泛应用到自主加油对接、无人机回收、精确着舰等飞机特定操纵与机动方面。本文就提出的动态逆控制框架下实现的直接升力控制,分别讨论了两种控制分配结构,并在这两种控制结构下,利用线性规划和加权伪逆控制分配算法,仿真分析了之相匹配的控制分配技术。通过仿真与分析,发现利用“时标分离”假设设计的航迹回路与姿态回路动态逆反馈控制中,实现直接升力舵面以及用于稳定速度的推力等执行机构应该单独在航迹回路实现控制分配,而不应该与姿态回路融合在一起实现执行机构的控制分配。同时由于本文使用的飞机模型执行机构较少,没能充分验证含有较多冗余操纵时这种控制分配结构的正确性,但在航迹回路利用辅助舵面要实现动态逆反馈控制,达到特定的飞行机动,这类控制分配结构和设计思路是一种研究和思考的方向。
