考虑永磁体温度的全工作域下永磁电机参数模型分析
2022-08-22师蔚董毅杰张舟云
师蔚, 董毅杰, 张舟云
(1.上海工程技术大学 城市轨道交通学院,上海 201620; 2.上海电驱动股份有限公司,上海 201806)
0 引 言
内置式永磁电机具有高功率密度、能够合理利用磁阻转矩、调速范围广等特点,被广泛应用于各种牵引领域,例如新能源电动汽车、轨道车辆、风力涡轮机、航空等[1-4]。
在电动汽车等牵引领域,永磁电机工况复杂,为了充分发挥内置式永磁电机磁阻转矩利用效率,提高单位定子电流的输出转矩,电机在恒转矩区常采用最大转矩电流比(maximum torque per ampere,MTPA)控制[5-6];而在恒功率区需要高速稳定运行,则需要通过弱磁进行进一步扩速[7]。然而,要想获得MTPA控制以及弱磁控制下的最优定子电流,必须获得精确的永磁磁链、电感参数模型等电机参数模型[5-8]。因此,国内外研究学者在电机参数模型特别是交-直轴电感参数模型计算中进行了充分的研究,利用有限元分析方法考虑了电机交-直轴电流交叉耦合、磁路饱和的影响[9-11]。文献[12]还在有限元分析了交叉耦合对电感的影响基础上,提出了考虑磁饱和、空间谐波的内置式永磁同步电机非线性模型。文献[13]在基于交直轴电流的电感三维数据表基础上,利用变参数电感及该电感关于交直轴电流的变化率进行参数补偿,提高控制精确度。然而上述研究中都未将电机内部的温度场考虑在内。
永磁体的温度变化会引起永磁体工作点的变动,无疑会对永磁电机的磁路造成不可忽视的影响,进而改变电机参数的大小。文献[14-17]研究了温度变化对内置式永磁电机特性和交直轴电感的影响,为考虑温度影响的控制算法奠定了基础,并对目前考虑电机温度变化影响的电机转矩补偿控制算法进行了详细的比较,但不论仿真研究还是实验验证均假设电机的内部温度一致,并未考虑电机内部温度的不均衡对电机参数的影响。目前国内外针对永磁体的温度效应与电机参数之间的关系研究不足,且鲜少应用于实际永磁电机控制策略中,这主要是由于在实际控制应用过程中,很难对永磁体的温度进行准确的监测,但随着永磁体温度在线估计的实现,使基于永磁体温度的永磁电机电感参数模型应用成为可能[18-19]。
综上,为了减小永磁电机在控制系统中由永磁体温度变化带来的输出转矩误差,优化控制策略中的电机参数,本文首先利用有限元模型分析了不同工况下的基于永磁体温度变化的电机参数,建立基于永磁体温度变化的交-直轴电感数学模型,并利用拉格朗日乘子法优化最大转矩电流比控制,使控制策略中的电流轨迹能够继续保持在理论上理想的工作位置,减小输出转矩的误差。最后通过永磁电机永磁体温升实验来分析不同永磁体温度下的电机输出转矩,以此验证基于不同永磁体温度下数学模型的准确性。
1 永磁电机仿真模型
本文研究的电机是车用内置式8极48槽永磁同步电机,“V”字型磁路转子如图1所示,主要参数如表1所示。相比于表贴式永磁同步电机,内置式永磁结构由于交直轴电感不同,拥有更强的输出转矩能力与弱磁调速范围。

图1 1/8电机模型结构图Fig.1 Structure diagram of 1/8 PMM model
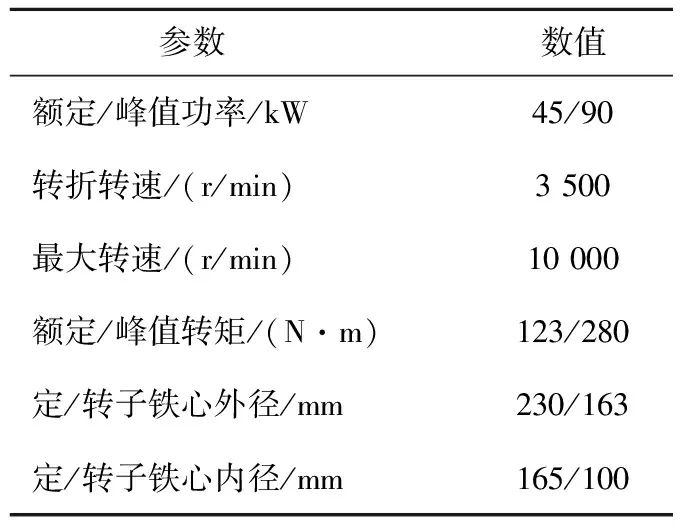
表1 永磁电机主要参数
磁钢材料选用高磁能积钕铁硼材料,图2为选用的钕铁硼牌号N35UH不同永磁体温度下的退磁曲线。由于车用电机永磁体温度在电机全域工况下通常处于20 ℃与140 ℃之间,因此本文将研究基于20~140 ℃永磁体温度下的电机运行工况。

图2 N35UH退磁曲线Fig.2 Demagnetization curve of N35UH
2 基于永磁体温度变化的电机参数研究
基于有限元法计算电机参数的常用方法有冻结磁导率法、矢量控制法以及差分磁链法。由于冻结磁导率法更符合真实电机内部磁场状况,并能较为准确地将非线性场转化为线性场进行叠加,克服了瞬态场无法精确计算永磁体磁链的问题[20-22],因此选用该方法计算电机交直轴电感和永磁磁链。
分析时进行电机带负载情况下有限元计算,输出定转子区域内的冻结磁导率,将该磁导率分别付给只有永磁体单独激励的电机模型计算永磁磁链直、交轴分量ψpmd与ψpmq;付给绕组单独激励的电机模型分析直轴自感Ldd和交轴自感Lqq,交直轴互感Ldq与Lqd,具体分析流程如图3所示。

图3 冻结磁导率算法计算电感与永磁磁链流程图Fig.3 Flow chart of calculating inductance and permanent magnet flux via FPM
2.1 不同永磁体温度下的永磁磁链
根据钕铁硼永磁体的温度特性,仿真研究电机在不同永磁体温度下的空载运行时永磁磁链,结果如图4所示,永磁电机空载运行时永磁磁链随着永磁体温度的上升而呈线性减小。在永磁电机负载运行时,将永磁电机的负载运行时的定转子磁导率进行冻结,分析在永磁体单独激励情况下的气隙磁密与空载运行时的气隙磁密发现,永磁电机负载运行下永磁磁链并不完全沿着直轴方向,在交轴上也存在着分量,如图5所示。因此,当永磁电机负载运行时,需要分别考虑直轴方向的永磁磁链分量ψpmd与交轴方向的永磁磁链分量ψpmq。
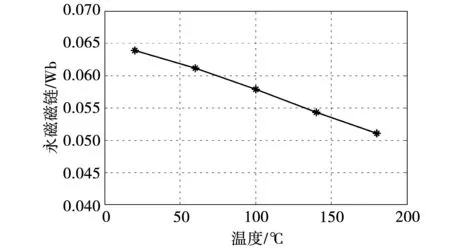
图4 电机空载运行时不同永磁体温度下的永磁磁链Fig.4 Permanent magnet flux at different temperature of permanent magnet under no-load condition
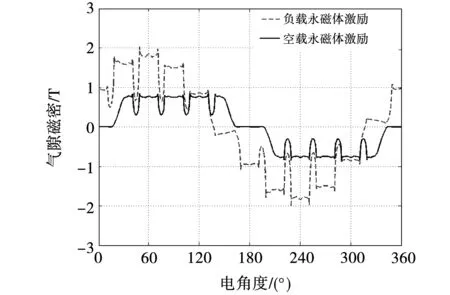
图5 空载和负载运行时永磁体产生的气隙磁密对比Fig.5 Comparison of air-gap flux density excited by permanent magnet between no-load and load condition
利用以上冻结磁导率方法,可以计算电机在不同温度下及负载电流即直轴电流id、交轴电流iq下的ψpmd与ψpmq。为充分考虑永磁体温度tpm对永磁磁链产生的影响,建立永磁磁链分量ψpmd与ψpmq在不同负载电流情况下,随单位温度上升的变化率分别为:
(1)
式中ψpmdb与ψpmqb分别为永磁磁链直轴、交轴磁链的基准值,选取在该负载情况下,永磁体温度为60℃下的直轴及交轴磁链值。
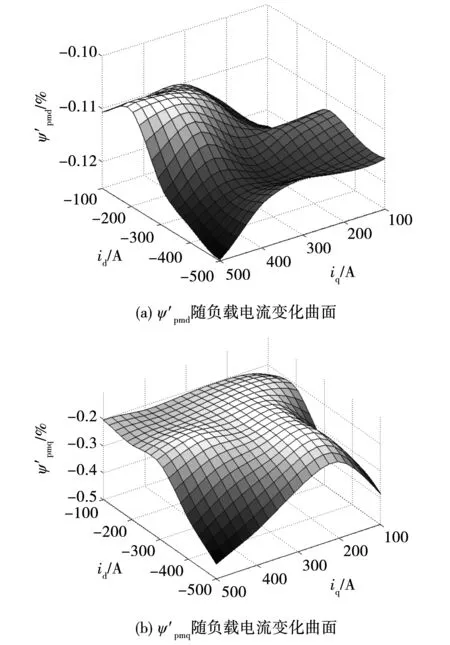
图6 永磁磁链温度变化率随负载电流变化曲面Fig.6 Temperature change rate of permanent magnet flux under load current
2.2 不同永磁体温度下的交直轴电感
将带负载情况下冻结磁导率付给只有线圈单独激励的电机模型,分析此时的永磁电机的交直轴电感,计算公式为:
(2)
式中:Ldd与Lqq分别为直轴自感和交轴自感;Ldq与Lqd分别为交轴对直轴的耦合互感和直轴对交轴的耦合互感。在相同工况下,令Ldq=Lqd=Lm,Lm表示交直轴互感参数。
(3)
式中Lddb、Lqqb、Lmb分别为直轴自感基准值、交轴自感基准值及交直轴互感基准值,选取在该负载情况下,永磁体温度为60 ℃下的自感与互感值。

图7 交直轴电感温度变化率随负载电流变化曲面Fig.7 Temperature change rate of d-q axis self-inductance and mutual-inductance under load current
3 基于永磁体温度变化的控制曲线优化
3.1 基于永磁体温度变化的改进电机数学模型
将仿真计算获得的不同永磁体温度下及负载电流下的电感和永磁磁链参数进行回归分析,即可得到在不同永磁体温度及负载电流下的电感参数函数Ldd(id,iq,tpm)、Lqq(id,iq,tpm)、Lm(id,iq,tpm),以及交、直轴永磁磁链函数ψpmd(id,iq,tpm)、ψpmq(id,iq,tpm)。由此可建立基于永磁体温度,考虑磁路饱和以及交叉耦合影响下的电机模型,改进的交、直轴磁链,交、直轴电压,电磁转矩计算如下:
(4)
(5)
(6)
(7)
式中:p为电机的极对数;ω为转子旋转电角速度;Tpm为同时考虑d轴与q轴永磁分量的永磁转矩;Trel1为交直轴自感差异引起的磁阻转矩;Trel2为交叉耦合互感引起的磁阻转矩。
利用以上改进电机模型即可得到不同永磁体温度下的恒转矩曲线,如图8所示。从图中可知,当转矩指令较小时,不同永磁体温度下的电流轨迹相差不大,但随着指令转矩的增加,在相同工况下,不同永磁体温度下电机所需要的id和iq的差异逐步增加。由此可以推断,当利用定温度下的电感及永磁参数进行电机控制时,在指令转矩较小的工况下,其输出转矩与指令转矩的误差并不大,但随着所需转矩增大及永磁体温度不断上升,电机输出转矩与指令转矩的误差会变大。
图8 不同永磁体温度影响下的恒转矩曲线簇Fig.8 Constant torque curves at different temperature of permanent magnet
3.2 最大转矩电流比控制参数优化
最大转矩电流比策略为通过寻找最优电流超前角,在一定的定子电流输入下使得电机输出最大转矩。即通过交直轴电感和永磁磁链,利用下式找到理想化的id和iq值:
(8)
为了避免由交直轴电感及永磁磁链受永磁温度及交叉耦合的影响造成输出转矩误差,利用基于永磁体温度变化的电机参数模型,采用拉格朗日乘子法,通过迭代的方式寻找最优化的id和iq大小。其中,最优化目标函数为永磁电机的电流幅值最小,即
(9)
式中:is为定子电流幅值;Ilim为逆变器输出最大限制电流。
约束条件为
(10)
拉格朗日乘子法函数为
(11)
式中ξ为拉格朗日乘子,对函数Λ分别求id、iq和ξ的偏导,得到如下方程:
(12)
(13)
(14)
将基于不同永磁体温度及负载电流下的电机参数函数Ldd(id,iq,tpm)、Lqq(id,iq,tpm)、Lm(id,iq,tpm)、ψpmd(id,iq,tpm)、ψpmq(id,iq,tpm)代入到拉格朗日方程式(12)、式(13)中,得到的两个拉格朗日方程为只包含有变量id和变量iq的方程组,因此可求得不同永磁体温度下MTPA策略中的id、iq最优解,结果如图9所示。

图9 考虑不同永磁体温度的MTPA曲线Fig.9 MTPA curves under different methods
由图9可知,当考虑永磁体温度效应时,相较于传统MTPA曲线,考虑永磁体温度效应下的MTPA轨迹与传统MTPA曲线有明显差异。电流超前角的角度随着交直轴电流幅值的增大而增大。
3.3 弱磁控制参数优化
对于恒功率区的弱磁控制策略而言,可将基于永磁体温度变化的电机参数代入电压极限圆方程,即
(15)
式中:us为感应电动势;Ulim为逆变器输出最大限制电压;Rs为基于线圈温度的绕组阻值。
图10为不同电机转速、不同永磁体温度下的电压极限圆,在转速上升的过程中,电压极限圆会向着其圆心收缩。当永磁体温度上升,电压极限圆的圆心沿着d轴正向移动,且相同转速下,电压圆的半径也随之减少。由于弱磁控制中的电流工作点为电流极限圆与电压极限圆的交点,从图10可以看出,在相同转速下,由于不同永磁体温度的电压极限圆不同,因此与电流极限圆的交点也会有所不同,从而可以计算出某一电机运行工况下,不同永磁体温度下对应的交直轴电流id、iq,并将其带入至电机控制系统中。
4 永磁体温升实验验证
为验证不同永磁体温度对电感、永磁磁链从而对电机输出转矩产生的影响,利用永磁电机温度实验平台进行实验验证。实验电机以算例电机为原型,在转子永磁体位置安装温度传感器实时监测永磁电机运行时的永磁体温度,并通过轴端温度处理及传输模块实时无线传输至控制终端电脑,模型电机实验平台如图11所示。此次实验,控制永磁电机在永磁体温度分别20、60以及100 ℃下变工况运行,处于安全考虑,并未对永磁体在140 ℃的高温电机工况进行实验。
在固定电压转速下,测试并记录当前工况的ud、uq、id、iq以及实测转矩值,并根据传统电压方程式(5)得出id和iq对应的标定电感数据。3组永磁体温度下的实验将分别在45 kW工况和55 kW工况进行。对比实验电机在3组不同温度实验工况下的标定交直轴电感值与本文所提的模型计算电感值。由于永磁体测温装置会对电机内部部分磁场造成畸变,从而改变磁路性质,因此为全域工况下的模型电感值添加修正系数进行修正,表2、表3为最终对比结果。

图10 不同永磁体温度影响下的电压极限圆曲线Fig.10 Voltage limit circles at different temperature of permanent magnet
表2 实测标定直轴电感与模型计算电感对比

表3 实测标定交轴电感与模型计算电感对比
图11 模型电机实验平台Fig.11 Model motor experiment platform
根据上表的实验数据可以看出,当电机在稳态工况下运行时,永磁体温度对直轴电感影响较大,而对交轴电感影响可以忽略不计,对比实测值和模型计算电感可知,实验总体误差在±9%以内,可以验证基于永磁体温度变化电感模型的准确性。
图12为电机不同转速、不同永磁体温度下的转矩模型值和转矩实测值的对比图,为了更好地进行分析电机参数变化对于输出转矩的影响,将转矩模型如式(10)所示进行转矩分离,分别得到Tpm、Trel1和Trel2。
由图12可知,随着转速上升,电机处于弱磁恒功率区,且根据之前分析,当温度上升时,ψpmd减小,Lm增加,因此由式(9)可知,固定转速下,永磁体温度越高,永磁转矩越小,交直轴自感差异引起的磁阻转矩Trel1几乎保持不变,而由交叉耦合引起的磁阻转矩Trel2略微增加,但由于Trel2中Lm互感的数量级与自感相比太小,因此磁阻转矩的增幅几乎可以忽略不计。
因此可以得出结论,当电机处于某一稳态工况时,永磁体升温过程中,使得输出转矩减小的主要原因在于永磁磁链ψpmd分量的减小,而交直轴自感以及交叉耦合互感在永磁体温度效应下的变化不足以使得电机输出转矩能力有明显下降。
图13与图14分别为永磁体为60 ℃与100 ℃额定工况下的电机外特性图,当永磁体温度分别达到60 ℃与100 ℃时,若使用未考虑永磁体温度效应下的20 ℃恒定电机参数模型,其输出转矩与实际转矩差距较大,在恒转矩区误差分别为16%与19%,而利用本文所提出的考虑永磁体温度效应的电机参数,其转矩误差分别为2.43%与3.25%。因此验证了本文所提模型的有效性。
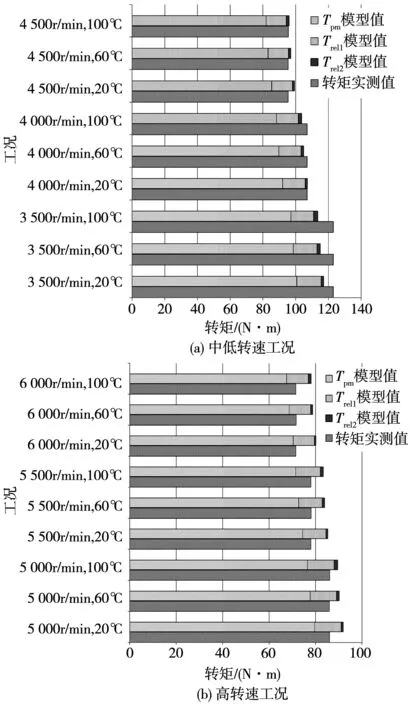
图12 45 kW额定工况下转矩模型值与实测值对比Fig.12 Comparison of torque between measurement and computational model under 45 kW condition

图13 永磁体60 ℃工况下转矩模型值与标定值对比Fig.13 Comparison of torque between computational value and scale value under 60 ℃ of PM
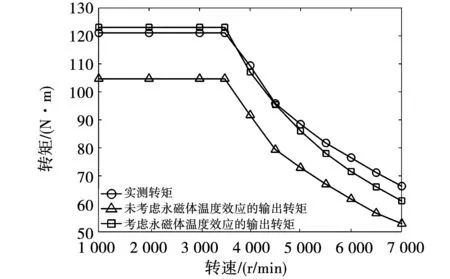
图14 永磁体100 ℃工况下转矩模型值与标定值对比Fig.14 Comparison of torque between computational value and scale value under 100 ℃ of PM
5 结 论
针对永磁体温度效应造成的电机参数变化以及永磁电机输出转矩误差问题,本文利用有限元法研究了永磁体温度在20 ℃到140 ℃之间的电机参数,基于冻结磁导率法计算了电机全域工况下的永磁磁链与交直轴电感参数,并分析了永磁体温度与永磁磁链、交直轴电感之间的关系,提出了计其永磁体温度与交叉饱和影响下的交直轴电机数学模型。并利用拉格朗日乘子法优化了基于永磁体温度影响下的最大转矩电流比以及弱磁控制,并研究了其电流轨迹与传统控制策略电流轨迹之间的偏差,具体结论如下:
1)利用冻结磁导率法分析了电机负载运行时,永磁体激励会分别在d轴与q轴产生永磁磁链分量ψpmd与ψpmq,根据有限元仿真结果可知,随着永磁体温度的上升,两轴方向的永磁磁链分量大小都会呈比例减小。
2)将考虑永磁体温度、磁路饱和以及交叉耦合影响下的电机模型利用拉格朗日乘子法对最大转矩电流比控制进行了优化,结果表明,传统MTPA电流轨迹与优化的MTPA电流轨迹之间的电流超前角度相差25°左右。此外,在弱磁电流轨迹中,将永磁体温度效应纳入考量,当永磁体温度上升,电压极限圆的圆心沿着d轴正向移动,且相同转速下,电压圆的半径也随之减少。
3)通过永磁体温升实验,对比永磁体分别在20 ℃、60 ℃以及100 ℃运行工况下的标定电感、转矩实测值与电感模型值、转矩模型值。在60 ℃与100 ℃运行工况下的转矩误差分别在2.43%与3.25%以内,验证了模型的精确度。
综上所述,本研究为永磁电机永磁体温度效应影响下的永磁电机特性进行了全面分析,其中,电机参数的分析结论可以为永磁电机考虑永磁体温度与交叉耦合的控制算法提供理论依据。
