一种状态扩维标签匹配的分布式融合算法
2022-08-20陈旭志杨金龙
陈旭志 杨金龙
(江南大学人工智能与计算机学院,江苏无锡 214122)
1 引言
传感器进行多目标跟踪是指利用多传感器同时探测复杂环境中的观测信号,并估计未知且时变的目标数目和目标状态,已被广泛应用于各种场景中的目标跟踪[1-5]。传统的基于数据关联的多目标跟踪方法,如联合概率数据关联滤波器(Joint Proba⁃bilistic Association,JPDAF)[6]和多假设跟踪(Multi-Hypothesis Tracking,MHT)[7]等方法,需要解决目标与量测关联问题,易出现“组合爆炸”现象,导致计算负载过大。Mahler 于2003 年提出了基于随机有限集(Random Finite Set,RFS)的概率密度假设(Probability Hypothesis Density,PHD)滤波[8],可以避免传统多目标跟踪的数据关联问题,引起学界广泛关注。目前,基于随机有限集的单传感器滤波算法主要有概率假设密度(PHD)、势概率假设密度(Cardinality Probability Hypothesis Density,CPHD)滤波[9]、势均衡多伯努利(Cardinality Balanced Multi-Target Multi-Bernoulli,CBMemBer)滤波[10]、广义标签多伯努利(Generalized Labeled Multi-Bernoulli,GLMB)滤波[11]、标签多伯努利(Labeled Multi-Bernoulli,LMB)滤波[12]等。
如今,传感器检测技术的进步和算力的提升使得多个传感器协同跟踪成为可能。多传感器网络协同跟踪可以利用各传感器节点滤波后验分布进行信息融合,以达到多目标跟踪的目的,且多传感器网络各节点采用融合的方式既可扩大跟踪范围又兼具鲁棒性的特点。利用多传感器网络进行多目标跟踪存在集中式和分布式两种,分布式多传感器网络相较于集中式传感器网络存在跟踪精度接近、通信资源要求和计算资源要求较低的优点,因此,利用分布式多传感器网络进行多目标跟踪具有较高的研究价值[13-14]。
信息融合最常见的方法之一是广义协方差交集(Generalized Covariance Intersection,GCI)[15],其相当于是计算局部后验概率密度归一化的几何平均;GCI规则又符合最小差异信息(Principle of Minimum Dis⁃crimination of Information,PMDI)原理[16],可以解释为局部后验概率密度与融合后验概率密度的Kullback-Leibler(KL)散度的平均[17]。针对分布式传感器网络,有几种滤波方法其基于GCI融合规则的实现已被提出,如势均衡概率假设密度(CPHD)[18-19]、多伯努利滤波(Multi-Bernoulli,MB)[20-21]和标签多伯努利滤波(LMB)[22-23]。其中,基于LMB 的分布式融合方法能够提供目标航迹,相较于基于CPHD、MB 等滤波器的分布式融合方法具有独特优势,但基于标签滤波器的分布式融合方法也存在计算复杂度较高以及标签空间不一致等问题[23]。目前,典型的基于标签滤波器的分布式融合方法包含:基于免标签的稳健GCI 融合算法(Robust GCI-LMB,R-GCILMB)[23]和基于标签匹配的高效GCI 融合算法(La⁃bel Matching GCI-LMB,LM-GCI-LMB)[24],其中,文献[23]中对各传感器标签空间不一致问题的产生机理进行了分析,并提出了标签不一致指示器来衡量标签不一致程度,并基于该思想提出最小化标签不一致指示器的融合方法,该方法在融合时采用非标签分布对目标动力学状态空间进行融合,然后再提取目标标签,以此克服标签空间不一致问题。文献[24]中则是提出一种基于最优匹配的标签匹配融合算法,克服文献[23]中计算复杂度相对较高的缺点。
通过上述分析,针对分布式多传感器多目标跟踪场景下,标签多伯努利滤波后验GCI 融合中存在的标签空间不一致问题,计算复杂度较高以及目标漏跟易导致融合精度下降问题,提出一种状态扩维标签匹配的分布式传感器融合算法,主要工作包括:(1)针对分布式融合中标签空间不一致问题,采用目标状态扩维的方法,引进传感器标识变量和匹配历史记录变量,改进分布式融合中目标标签匹配过程,使得融合过程更加高效的同时,也避免了标签空间不一致的问题。(2)针对LMB 后验进行分布式融合复杂度较高问题,只针对“疑似目标”进行融合,通过‘分而治之’的策略,融合目标分为三个部分:已匹配目标、新生目标与未匹配目标、剩余“疑似目标”三部分处理,结合上述改进目标标签匹配过程,有效降低融合过程的计算量,进一步提升了算法的运行速度,明显要快于对比算法。(3)针对GCI融合对于漏跟目标敏感的特性,对非新生、未匹配目标建立目标漏跟表,通过判断目标是否为漏跟目标,对漏跟目标采用补偿反馈,提高分布式多传感器多目标跟踪算法的鲁棒性,以及目标检测概率低场景下多传感器的跟踪效果。
2 基础理论
2.1 标签多伯努利滤波
假设在标签随机有限集中,目标标签空间用L表示,目标标签采用l∈L表示,标签为l的目标存在概率为rl,该目标的概率密度分布为pl,标签随机有限集采用X表示。则LMB概率密度分布表示为
其中,Δ(X)保证目标标签唯一性,H(X)为目标随机集基于映射H所得到的标签全集,
为便于表示,采用以下参数集表示LMB概率密度
LMB 滤波器由预测和更新步骤组成。预测步骤包含目标的出生、消失和目标运动状态的变化,更新步骤则利用传感器量测对目标状态进行更新。
预测步骤。新生目标随机有限集的后验分布表示为
其中,B表示新生目标标签空间。假设k-1 时刻,传感器滤波得到的LMB后验分布表示为
其中,Lk-1表示k-1 时刻目标的标签空间。在k时刻,多目标概率密度的预测分布仍是LMB 随机有限集形式,其预测分布为
更新步骤。k时刻更新后标签多伯努利后验分布表示为
其中,Lk为k时刻目标的标签空间。更新后标签l对应的目标的存在概率和概率密度表示为
其中,Θ 是k时刻目标与量测的映射空间,(I,θ) ∈F(Lk)× Θ 表示一个映射假设,ω(I,θ)表示假设的权重;pθ(x,l)是标签为l的目标与量测在映射θ下得到的后验概率密度。pD(x,l)是目标检测概率,qD(x,l)是目标漏检概率,g(zθ(l)|x,l)是目标似然函数。
2.2 广义协方差交集(GCI)融合规则
假设多传感器网络中有一组传感器节点S={1,2,3,…,N}。在每个传感器节点s∈S中,传感器进行本地滤波得到局部多目标后验密度πs(X)。多传感器GCI 融合规则由Mahler 在[15]中提出,又称为几何平均融合规则。局部传感器可利用GCI融合规则对其本地传感器滤波后与通信接收到的相邻传感器的滤波结果进行融合,得到融合的后验分布,融合后验分布代替本地后验分布,并迭代进行滤波跟踪。融合后验分布可表示为
GCI 规则符合最小差异信息(PMDI)原理,可以解释为局部后验概率密度与融合后验概率密度的KL 散度的平均。概率密度πs(X)与概率密度π(X)的KL散度可以表示为
式(20)中的积分为集合积分[25]。
在贝叶斯统计中,KL散度可以解释为先验密度和后验密度之间的信息增益,GCI 融合的结果是使信息增益加权总和的最小密度。假设信息增益使用KL散度衡量,采用DKL(π(X);πs(X))表示,符合最小信息差异原则的融合密度由下式可得
其中,ωs是代表相应传感器重要性的权重,同样满足
对于标签多伯努利概率密度来说,假设相同目标在各传感器中拥有相同的标签,在传感器s的LMB 后验概率密度参数为,则LMB 后验概率密度的融合公式为
由于在实际跟踪过程中,各局部传感器易出现标签空间不一致的问题,即同一目标在各局部传感器中被赋予的标签不一致,文献[23]给出了出现目标标签不一致现象的机理,因此,只进行标签匹配,再进行融合会导致信息错误融合,造成跟踪精度下降。
3 问题分析
3.1 GCI融合存在的问题
采用GCI融合规则对相邻各传感器局部后验分布进行信息融合,需要相邻各传感器局部后验分布具有一致性[26-28]。在多传感器网络中,当某个传感器节点失效,导致跟踪结果不准确,或由于漏检导致漏跟,或由于监测区域不完全重叠,都会导致该传感器节点后验分布易与其相邻传感器的局部后验分布出现不一致性问题,进而导致信息融合后跟踪精度下降,再通过各传感器通信扩散,进而导致多传感器网络的跟踪精度下降。
如图1 所示,两个扇形区域分别表示两个传感器监测区域,存在部分重叠,传感器1 和传感器2 对场景中两个目标进行跟踪。
图2 为图1 场景中两个传感器的分别采用LMB算法的跟踪结果和采用GCI 融合后的跟踪结果,可以看出,传感器1与传感器2进行本地LMB 滤波时,可以对本传感器监测区域内目标进行准确估计,但采用GCI融合方法后,出现势低估的现象,融合结果都比单传感器滤波的结果要差。这是由GCI融合的性质决定的,只有当所有本地传感器都能检测跟踪到同一个目标时,采用GCI 融合才能有效提高跟踪精度,反之则会造成跟踪精度的下降,即进行GCI融合时,需要保持局部后验的一致性,否则会影响融合精度[26-28]。
3.2 标签多伯努利GCI融合算法问题分析
传统的标签多伯努利GCI融合算法,如式(23)、(24)所示,是对有相同标签的目标信息进行匹配融合,即“逐标签(按标签)”融合的方式。对不同的传感器进行目标跟踪时,对相同的目标要赋予相同的标签,即标签的一致性。假设出现标签不一致问题,直接采用(23)、(24)的式子进行融合,则会导致信息无法有效融合。
文献[23]对传感器采用标签滤波器进行滤波时,相同目标在不同传感器被赋予不同标签的现象,建立了评价标签信息不一致的指示器,表明GCI融合性能随标签不一致程度的增大呈指数下降,因此,标签滤波器滤波后,采用逐标签的方式进行GCI融合,对标签不一致高度敏感。针对该问题,因标签多目标分布与其非标签分布具有相同的目标动力学统计信息,文献[23]中提出一种在目标动力学状态空间进行GCI 融合,而不涉及到标签信息的分布式融合算法,使得GCI 融合不受“标签不一致”的影响。但非标签分布GCI融合计算为不同融合映射分量的加权和,当跟踪目标较多时,非标签分布GCI融合映射分量个数呈指数增长,计算负载较大。无标签版本的标签多伯努利族分布的融合后,所得分布为GMB分布,表示为
式(25)中,融合映射分量个数为F(L) × Θ,该映射分量个数决定了融合分布GCI 计算量大小。文献[24]则提出一种最小化标签信息不一致指示器,基于最优匹配的高效标签匹配滤波器,有效克服标签不一致对LMB 后验分布融合影响,以及降低了计算复杂度。但该方法在进行融合时,需要每时刻都进行代价矩阵运算以及求解线性分配问题得到最优匹配,并且未解决目标漏跟问题对融合精度的影响。
4 提出算法
在分布式传感器中,为了进行传感器识别,定义离散空间S={si:i∈N*},N*表示为正整数的集合,si在传感器网络中具有唯一性,可以在传感器网络部署时确定,若si≠sj,i≠j,则传感器si与传感器sj为不同的传感器。此外,定义离散空间Q={(l,si):l∈L,si∈S},其中L为[11]中定义的离散可数空间,l∈L为目标标签用来识别目标,具有唯一性。
针对分布式多传感器多目标跟踪问题,引入si∈S与q∈Q对单目标状态x进行扩展,si表示传感器标识,q表示融合过程中标签匹配记录,得到扩维的目标状态x'。扩维前目标状态x=(x,l),则扩维后目标状态x'表示为
扩维后LMB参数集为
在分布式传感器网络中,传感器进行本地滤波时,si作为传感器标识是固定不变的,在同一个传感器进行LMB 滤波得到的参数集中各分量si相同,在标签为l的目标首次进行匹配并进行融合时,q(l)则记录与之匹配、融合目标的标签及传感器标识。
假设k时刻,传感器si经过本地LMB 滤波,得到的本地后验标签多伯努利参数集记为
与传感器si互连的传感器的集合为⊂S,对于任一sj∈,其本地后验标签多伯努利参数集为
为减少通信代价以及减少计算量,提出采用“分而治之”的策略,即仅将“疑似目标(Target-Like,TL)”对应的标签多伯努利集参与传感器间传输与融合,而非“疑似目标”对应的标签多伯努利集则不参与传感器间传输与融合,因为,只有相同目标的标签伯努利参数集进行融合才具有现实意义,而表示不同目标的标签伯努利参数集或者目标与非目标的标签伯努利参数集进行融合没有意义[29]。为此,提出算法中需要找到表示相同目标的标签伯努利参数集进行融合。
对于“疑似目标”和非“疑似目标”的区分,文献[29]中提供了两种策略:排序原则或者阈值原则。排序原则是先进行本地后验势估计,然后按目标的存在概率提取等于势估计个数或者稍大于势估计个数的伯努利参数集进行传输与融合。阈值原则是根据阈值rgate进行提取,只有目标存在概率大于rgate的目标对应的伯努利参数集才进行传输与融合。
根据上述思想,假设传感器si中标签多伯努利参数集和传感器sj中标签多伯努利参数集提取的多伯努利参数集分别为
在传感器si的“疑似目标”标签多伯努利集中对中所有标签伯努利分量进行检索,判断伯努利分量在之前的时刻中是否已经基于最优映射进行过匹配与融合,把中的伯努利参数集分为三个部分
同理,传感器sj的“疑似目标”标签多伯努利集,中所有标签多伯努利分量也可以分解为三个部分
4.1 已匹配目标的融合
根据伯努利集参数q的搜索匹配,可以得到对应的匹配目标,根据式(32)与(33)分析可知,对于任一,存在且唯一与之匹配,代入式(23)、(24)可以进行按目标的GCI融合
4.2 未匹配目标的融合
在si传感器中,对任一,此时,标签集里的目标可能是未完成过匹配与融合的新生目标;也可能是完成过匹配与融合,但此时刻相邻传感器sj漏跟的目标,需分两步处理。首先,遍历与,对于的目标,即新生目标,采用基于Murty 算法获得最优映射θb,得到融合匹配集,基于此映射完成新生目标的匹配,然后根据式(34)与(35)进行融合,得到新生目标融合后验多伯努利集,即
由上述可知,可以对新生目标或者漏跟与虚警目标完成融合处理,得到未能匹配目标间相应的融合后验。
4.3 剩余的疑似目标的融合
根据前面两步的融合步骤,由于采取阈值rgate或者大于势估计数目进行“疑似目标”标签多伯努利集的传输,可能还有少量剩余疑似目标的标签多伯努利集没有融合。
采用上述(2)中对新生目标的处理方法对剩余疑似目标的标签多伯努利集进行融合,对于的目标,若根据Murty 算法基于最优映射,找到对应的目标,我们根据式(34)与(35)进行融合,但此时并不记录标签,即融合过后q(l3)为∅,可得剩余疑似目标融合后验伯努利集,即
4.4 算法分析
通过对不同目标集合进行分别融合处理,得到最终的融合后验分布可表示为
提出算法首先对已匹配目标进行融合,已匹配目标标签多伯努利集是根据标签多伯努利集中各LMB 项的变量q进行遍历搜索得到,采用查找算法的时间复杂度为O(),其中N1为传感器标签多伯努利集中伯努利集个数。其次对于新生目标,采用基于最优映射得到融合匹配项,匹配后采用变量q记录与之匹配项标签与传感器标识,匹配过程中,求解线性分配问题时间复杂度为O(),其中N2为新生目标数;对于漏跟与虚警目标标签多伯努利集,在前面查找已匹配目标标签多伯努利集过程中,已得到变量q非空但未匹配LMB 集,此时,只需遍历该集合各LMB 项变量q,查询历史匹配标签是否已存在该传感器漏跟与虚警表中,判断该传感器已连续未提取该目标时长,该过程时间复杂度为O(N3),其中N3为漏跟与虚警个数。最后,对于剩余“疑似目标”标签多伯努利集,同样采用基于最优映射得到融合匹配项,进行融合,但对“疑似目标”标签多伯努利集的融合不做匹配记录,即不改变LMB项中q变量,匹配过程中,求解线性分配问题的时间复杂度为O(),其中N4为剩余“疑似目标”标签多伯努利集中包含的LMB项个数。
基于上述分析可知,已匹配目标标签多伯努利集分布进行GCI 融合,其时间复杂度为O(max{,T}),其中O(T)为两个匹配的标签伯努利进行GCI融合所需时间复杂度。新生目标标签多伯努利分布进行GCI 融合,其时间复杂度为O(max{,T});当新生目标完成第一次匹配与融合后,与其匹配目标的标签及其传感器标识会记录在该新生目标标签多伯努利集参数中的变量q,该新生目标下一时刻将会按照已匹配目标进行处理;漏跟与虚警目标标签多伯努利集进行GCI 融合,其时间复杂度为O(max{*N3,T});同理,下一时刻本地传感器能跟上漏跟目标,漏跟目标也会变成已匹配目标。剩余“疑似目标”标签多伯努利集分布进行GCI 融合,其时间复杂度为O(max{,T}),“疑似目标”在后续时间中若能得到相对应的量测更新,则有可能提取为目标,此时该目标将按照新生目标处理。
若传输的伯努利集中全为新生目标标签多伯努利集或剩余“疑似目标”标签多伯努利集时,提出算法其时间复杂度与LM-GCI-LMB[24]融合算法的时间复杂度相同;若全为漏跟目标标签多伯努利集,提出算法其时间复杂度也跟LM-GCI-LMB融合算法的时间复杂度相同,此时N1=N3;若全为已匹配目标标签多伯努利集,仅需通过参数q进行搜索完成标签匹配,要明显优于LM-GCI-LMB融合算法,而且当新生目标稳定跟踪或者漏跟目标重新跟上,则全部目标为已匹配目标标签多伯努利集,有效降低了算法的计算负载。
5 实验结果与分析
实验中将在2 个和3 个传感器场景下分别对提出算法进行评估,与典型的本地LMB滤波算法[12]以及LM-GCI-LMB融合算法[24]进行对比分析。实验中所有算法均为基于SMC 方法实现,其中,每个标签伯努利项采样500 到1000 个粒子。提出融合方法传输“疑似目标”标签多伯努利集阈值为存活概率rgate=0.3,漏跟目标补偿策略参数N=2,GCI 融合中融合权重采用Metropolis 权重[31]。此外,实验中采用optimal sub-patter assignment(OSPA)误差[32]评估三种算法的跟踪精度,其中截断参数c=100、阶数p=1,实验中采用100次蒙特卡洛仿真。
假设目标检测概率为pD=0.98,目标存活概率为pS=0.99。每个目标的状态包括目标的位置,x与y方向上的速度以及转弯速率。目标状态表示为
其中,(dx,dy)表示在直角坐标系下的目标,(vx,vy)分别表示在x与y方向上的速度,wk表示转弯速率。状态转移分布表示为
其中,K(w)为状态转移矩阵,Q为过程噪声强度。
其中σw=5,σu=π180 是过程噪声标准差。杂波分布服从泊松分布,泊松参数为λ=10,强度为α=12000π。
传感器采用非线性量测模型产生每个时刻的量测
5.1 两传感器跟踪五目标场景
假设传感器坐标分别为[-300 m,0 m]与[300 m,0 m],跟踪过程中涉及到目标的新生与死亡,即目标数目是变化的。目标出生与死亡时刻、运动、死亡参数如表1 所示,目标运动场景如图3 所示,实验中采用自适应新生(Adaptive Birth Process,ABP)模型[12],该实验场景持续时间为60 s。
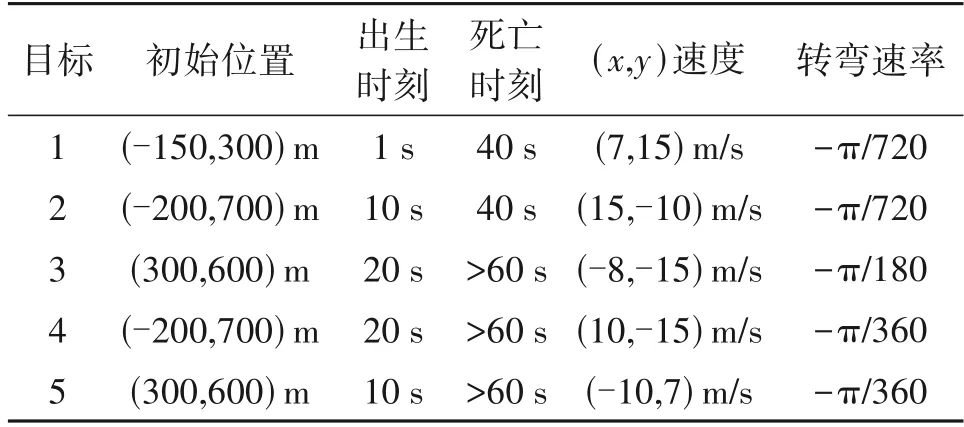
表1 五目标出生、运动、死亡参数Tab.1 Birth,motion and death parameters of five targets
实验结果如图4 和图5 所示,分别给出了不同算法的OSPA 精度统计曲线以及势估计对比图。图中LMB1 与LMB2 曲线分别为传感器1 与传感器2运行LMB 滤波所得OSPA 曲线图,提出方法1 与提出方法2 曲线分别为传感器1 与传感器2 运行提出算法所得OSPA 曲线图,LM-GCI-LMB1 与LM-GCILMB2分别为传感器1与传感器2运行LM-GCI-LMB算法所得OSPA曲线图。
从图4 可以看出,提出融合算法与LM-GCILMB 融合算法均优于没有采用融合策略的本地LMB 滤波算法。相对于LMB 滤波,采用GCI 融合规则的LM-GCI-LMB以及提出算法,由于第10 s和20 s存在目标新生,传感器需要几个时刻才能达到稳定,所以在有新生目标出现时,OSPA 误差略大,但当算法稳定后,采用融合策略的两种方法都明显优于LMB 算法,且提出算法优于LM-GCI-LMB 算法。在40 s 时刻存在目标死亡,采用融合策略的算法对应OSPA 较LMB 算法OSPA 下降快,能快速终止死亡目标,从图中曲线可知,提出算法明显要优于LMGCI-LMB与LMB算法。
从图5可以看出,三种算法势估计都较为准确,但由于提出算法对不同状态的目标分别进行融合处理,尤其在出现目标新生的时刻,仅对新生目标进行特殊处理,对存活目标只需要在本地搜索匹配,根据标签特征维持,提升了算法的稳定性,因此,提出算法在有新生目标出现时的精度与LMB 相当,略高于LM-GCI-LMB,其他时刻精度相当。
此外,为了验证提出融合算法的鲁棒性,基于本场景,在不同检测概率、不同杂波率环境下也分别进行实验,结果如图6和图7所示。
从图6 可以看出,本文提出融合算法在不同的检测概率下均优于本地LMB 滤波以及LM-GCILMB 算法。低检测概率下容易出现漏跟现象,本文提出融合算法表现较好,主要原因在于提出方法对漏跟目标进行特殊处理,建立了漏跟与虚警表,使得传感器判断在发生漏跟时,利用相邻传感器后验分布标签多伯努利集,将本地漏跟目标的后验标签伯努利补偿反馈到融合后验中,使得在后续跟踪过程快速跟上该目标。从图7 可以看出,对于容易出现虚警的高杂波率场景中,采用GCI融合策略算法,均优于本地LMB 滤波算法,由于提出算法对虚警进行处理,虚警目标记录在漏跟与虚警表,只有在后续持续跟踪时才把相应标签多伯努利集加到融合后验中,但大多数虚警无量测更新,存在概率急剧下降;而LM-GCI-LMB是基于每个时刻最优匹配的,当虚警分布与真实目标分布相近时,可能会进行匹配与融合,而这种匹配与融合是错误的。因此,在高杂波环境下,提出算法优于LM-GCI-LMB算法。
表2给出了本地传感器每个时刻的平均运行时间以及与相邻传感器的通讯量(通信量定义为相邻传感器交互传递的标签伯努利分类个数)。可以看出,没有融合步骤的LMB 运算速度最快,提出方法次之,LM-GCI-LMB 最慢。两个融合算法中,由于提出算法采用“疑似目标”规则传输数据,每次的通信量远小于LM-GCI-LMB,也降低了提出算法的计算量,仅为LM-GCI-LMB算法的一半。
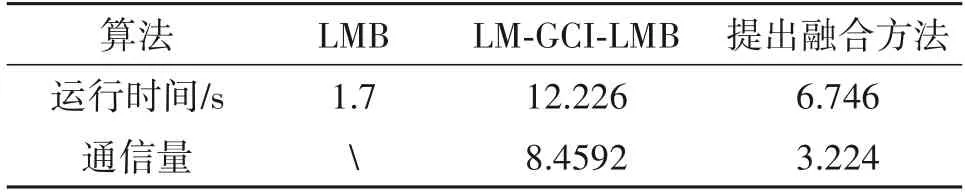
表2 不同算法每扫描时刻平均运行时间和通信量Tab.2 Average running time and number of LMB set’s transmission at each scan
5.2 三传感器七目标场景
假设3 个传感器坐标分别为[-300 m,0 m]、[0 m,0 m]与[300 m,0 m]。场景中目标出生、运动、死亡参数由表3 所示,目标运动过程由图8 所示。该场景持续时间为70 s。
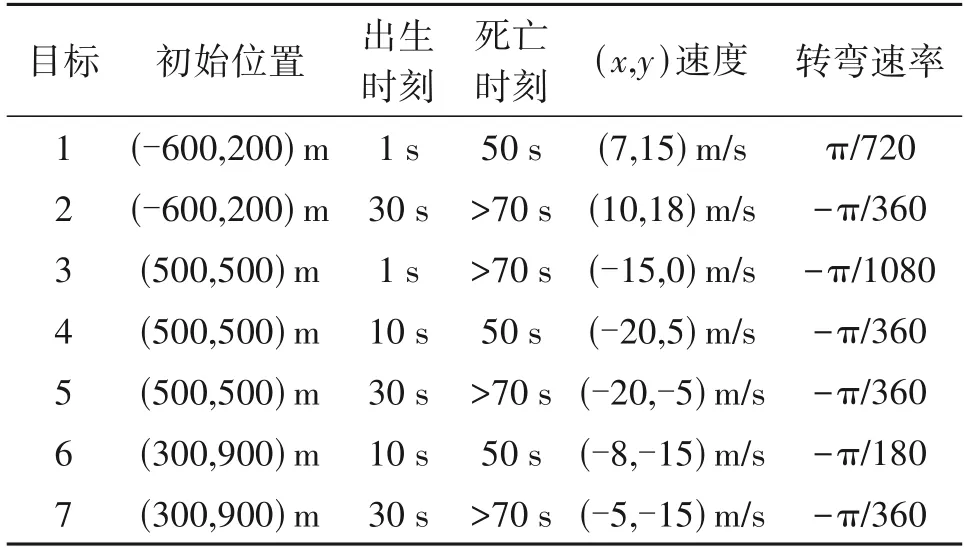
表3 7目标出生、运动、死亡参数Tab.3 Birth,motion and death parameters of seven targets
实验结果分别如图9~图12 和表4 所示,图9 是3个传感器进行多目标跟踪场景下,各算法的OSPA曲线图,同样可以看出,除了目标新生和目标消失时刻的跟踪误差较大,其他情况下,提出融合算法的跟踪精度都明显要高于其他算法。图10 为目标势估计图,可以看出,总体上三种算法势估计均较为准确,在目标新生和消失时,LMB 与提出算法略好于LM-GCI-LMB算法。
图11 和图12 分别为不同算法在不同检测概率和不同杂波率下的平均OSPA 统计结果图,可以看出,融合算法在不同检测概率和不同杂波率下具有较好的鲁棒性,明显要优于其他算法。在检测概率降低时(为70%时),LM-GCI-LMB 算法精度下降明显,因检测概率低,可能使得传感器在跟踪目标时出现漏跟的可能性变大,传感器越多,有传感器出现漏跟的概率越大,融合精度受影响就越大。
表4给出了三传感器场景下本地传感器每个时刻三种算法的每时刻平均运行时间以及与相邻传感器的通讯量。可以看出,提出算法的通信量明显要低于LM-GCI-LMB算法,降低融合计算量,运行时间也明显少于LM-GCI-LMB算法。
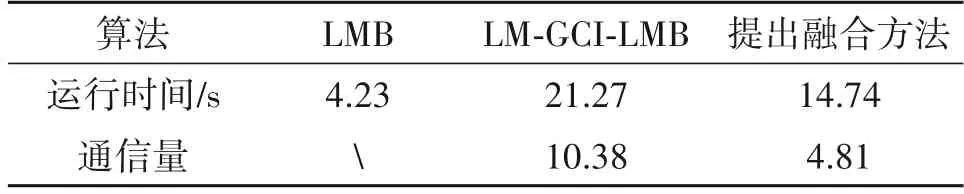
表4 不同算法每扫描时刻平均运行时间和通信量Tab.4 Average running time and number of LMB set’s transmission at each scan
6 结论
针对标签多伯努利分布进行GCI 融合中,存在“标签不一致”现象、以及目标漏跟等影响融合精度的问题,提出了一种改进的标签滤波器分布式融合方法。首先对目标状态进行了扩维,引入传感器标识,以及匹配历史标签记录变量,对不同类别的目标融合过程分别进行了优化,避免了标签空间不一致问题,且降低算法的融合运算时间;其次,相邻传感器间只传输“疑似目标”标签多伯努利,减少通信数据量以降低算法计算量,且通过对漏跟与虚警目标进行特殊处理,提高算法在检测概率低、杂波率高等复杂环境下的跟踪精度。最后通过不同场景下的实验进行验证,提出的融合算法在融合精度和运行速度上都要明显优于LM-GCI-LMB 算法,具有较好的鲁棒性。
