公路养护作业区逐级限速控制研究
2022-08-19吴胜坤朱文兵宋学文武精科程永振
吴胜坤,朱文兵,杨 静,宋学文,武精科,程永振
(1.江苏宿迁交通工程建设有限公司,江苏 宿迁 223899;2.宿迁市交通运输局,江苏 宿迁 223999;3.淮阴工学院 建筑工程学院,江苏 淮安 223001)
我国公路尤其是高等级公路通车里程逐年增加,至2020年底,全国公路通车里程已达519.81万千米[1]。由于车辆荷载和恶劣环境的多重影响,公路通车几年后即出现严重病害,需要进行针对性的大中修养护[2-5]。公路养护作业需要封闭部分车道,造成交通运行环境恶化,出现行程延误、车辆排队和交通拥堵,甚至诱发安全事故[6]。为保证养护作业控制区通行车辆、施工人员及财产安全,通常在警告区实行限速管理[7-8]。
限速控制一般在警告区内完成,需要确定最终限速值与降速方案,《公路养护安全作业规程》(JTG H30—2015)[9]规定逐级限速宜采用每100 m降低10 km/h,而《道路交通标志和标线第4部分:作业区》(GB 5768.4—2017)[10]则提出限速过渡差不应超过20 km/h。国内外学者也对道路养护区限速控制开展了大量的研究[11-15]。孙智勇等[16]以Devs为作业区安全评价指标,提出警告区限速差临界值宜取20 km/h。周育名等[17]利用交通延误和交通冲突率指标,探讨了不同交通等级公路养护作业区的封闭模式及最终限速。于仁杰等[18]基于高速公路施工区长度划分计算模型,考虑了车辆排队长度、驾驶人短时记忆以及重复距离等因素,提出了高速公路施工区限速标志位置确定方法。
以往对养护作业区限速控制的研究侧重于最终限速、限速差和限速标志位置。而不同设计速度公路养护控制区的降速梯度涉及较少。利用微观交通仿真软件Vissim建立公路养护控制区仿真模型,以Devs和冲突率作为评价指标,研究最终限速值和降速梯度对交通安全的影响,提出警告区的限速控制方案。
1 作业区仿真模型构建
目前,微观交通仿真取得了快速发展,并研发了一系列仿真软件。相对于其他软件,Vissim功能齐全、实际交通状态适应性好,更适合公路养护作业区交通系统运行仿真模拟。为保证Vissim的模拟精度,需标定交通流特征参数和驾驶行为参数[19]。对于国内外差异不明显的参数如车辆尺寸和加减速特性,采用软件默认值;涉及交通流特征及驾驶行为差异的参数,需要结合现场调研标定。本研究首先采集了S324宿迁段大中修工程封闭路段前后的车速,统计了不同类型车辆的车速累积频率分布,完成对Vissim模型中期望车速的标定。然后,选用Wiedemann 74跟车模型,并对模型中的驾驶行为特征参数进行标定,其中,跟驰行为和车道变换参数选用孙剑等人的研究成果[20]。
为简化模型,采用Vissim建立双向四车道的半幅路面,并只设置警告区、上游过渡区和缓冲区,其长度设置参考JTG H30—2015公路养护安全作业规程[9],逐级限速应按每100 m降低10 km/h设置。此外,假定:①不考虑非机动车与机动车辆的混合行驶;②不考虑车辆借用对向车道超车及不按规定让行的不安全驾驶行为;③不考虑车辆借用路肩行驶和停车等不安全行为。
2 交通安全评价指标
2.1 运行速度标准差稳定系数
交通安全受到车辆行驶速度离散程度的严重影响。统计样本的车速标准差越大,路段的交通安全隐患也就越大。因此,可以采用运行速度标准差稳定系数,即Devs衡量车辆速度的变化是否稳定,并作为养护作业控制区交通安全的评价指标。Devs可以表述为:

2.2 车辆冲突率
交通安全与车辆冲突数存在密切联系,一般冲突数越高,交通事故率也越高。此外,为更加客观反映车辆行驶安全,还需考虑车辆行驶路段的长度。车公里冲突数定义为冲突数与交通量和路段长度乘积的比值,即:

式中:f为冲突率,次/(辆·km);TC(Traffic Conflict)为车辆冲突次数,次;Q为仿真交通量,辆/h;L为仿真路段长度,km。
Wiedemann 74跟车模型如图1所示,驾驶行为状态包括无反应区、无意识反应区和有意识反应区。处于有意识反应区的车辆由于过于逼近前车,存在撞车风险。Vissim仿真记录中标记为AX的车辆与前车的距离小于期望车头间距,处于碰撞危险区。统计仿真过程中标记为AX的车辆的出现频次作为冲突数。
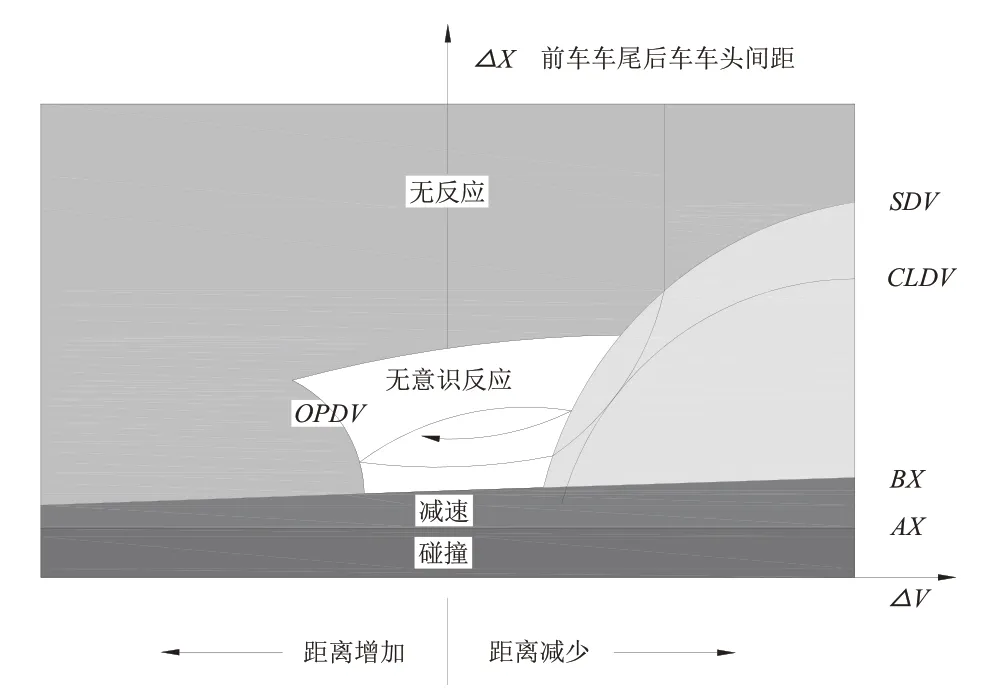
图1 Wiedemann 74跟车模型
Vissim仿真记录中,车辆交互状态除BRAKEAX外,还有FREE、FOLLOW和BRAKEBX。同一车辆在不同行驶位置可能均处于BRAKEAX状态,因此,还需记录车辆编号和模拟时间。由于仿真数据量大,首先采用Power BI Desktop筛选出警告区内的车辆交互状态,然后使用EXCEL对数据二次处理,即先按车辆编号排序,后按模拟时间排序,筛选出交互状态为BRAKEAX的车辆频数。
3 逐级限速对车速变化和交通冲突的影响
交通量为1800 pcu/h,设计速度100 km/h公路养护作业区限速控制对警告区速度分布的影响见图2。进入限速区后,车速逐渐下降,并最终达到限速值。限速值越小,车辆达到限制速度行驶的距离越长。若设定最终限速值为60 km/h,采用一阶限速,在700 m处车速发生明显突变;采用二阶限速,在700~900 m之间车速出现震荡;而采用三阶限速,车速变化比较平稳。若设定最终限速值为40 km/h,采用一阶限速,车速变化相对剧烈,限速区和上游过渡区发生交通拥堵,甚至影响限速区上游路段车辆行驶速度的稳定性,车速出现明显下降,而采用二阶和三阶限速也不能使车速平稳下降。
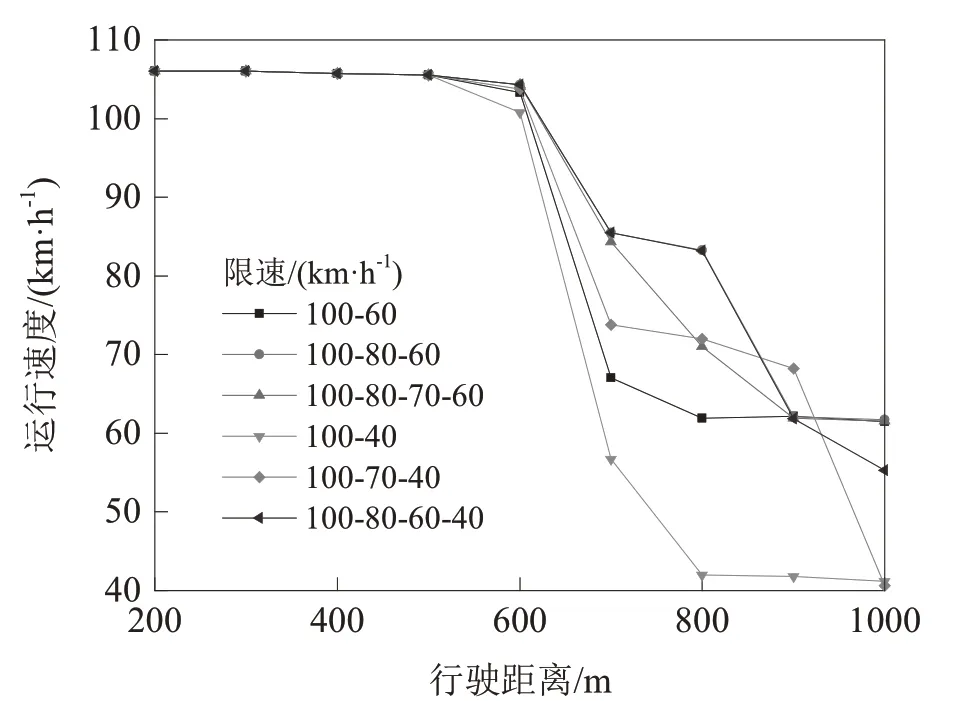
图2 设计速度100 km/h公路限速控制对警告区车速分布的影响
设计速度100 km/h公路养护作业区限速控制对警告区Devs分布的影响见图3。最终限速值为60 km/h时,采用一阶限速,进入限速区后,Devs值逐渐上升,达到最大值后开始下降,并最终趋于平稳;采用二阶限速,Devs变化相对平稳,在600~900 m处出现小幅震荡;采用三阶限速,进入限速区后,Devs平稳下降后趋于稳定。相对于最终限速60 km/h,最终限速值为40 km/h时,Devs震荡十分剧烈,采用一阶限速,进入限速区后,Devs突然上升,最大接近0.2,下降后又突然上升,并未趋于稳定;采用二阶和三阶限速,Devs均表现为小幅下降后突然上升,最大值分别接近0.12和0.18。
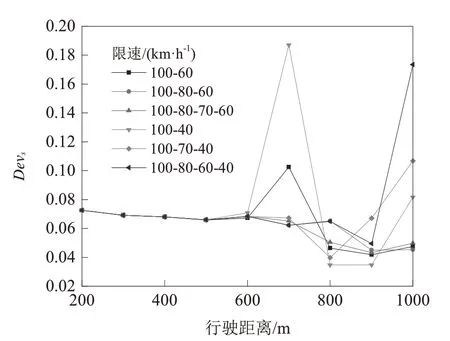
图3 设计速度100 km/h公路限速控制对警告区Devs分布的影响
设计速度100 km/h公路养护警告区车辆冲突率见表1。最终限速值越小,限速阶数越高,冲突率越大。最终限速值为60 km/h时,采用一阶、二阶和三阶限速方案,警告区的冲突率分别为1.07、1.15和1.30次/(辆·km)。而最终限速值为40 km/h时,采用一阶、二阶和三阶限速方案,警告区的冲突率则分别达到1.86、2.38和2.69次/(辆·km)。最终限速值过低,将导致限速区和上游过渡区发生交通拥堵,车辆行驶缓慢,车头间距较小,冲突率上升。而限速阶数越高,车速变化频次越高,进而导致冲突率增加。综合警告区Devs分布和冲突率,设计速度100 km/h公路养护作业区,在交通量较大时,应采用三阶降速方案,最终限速值不宜过小,采用60 km/h为宜。
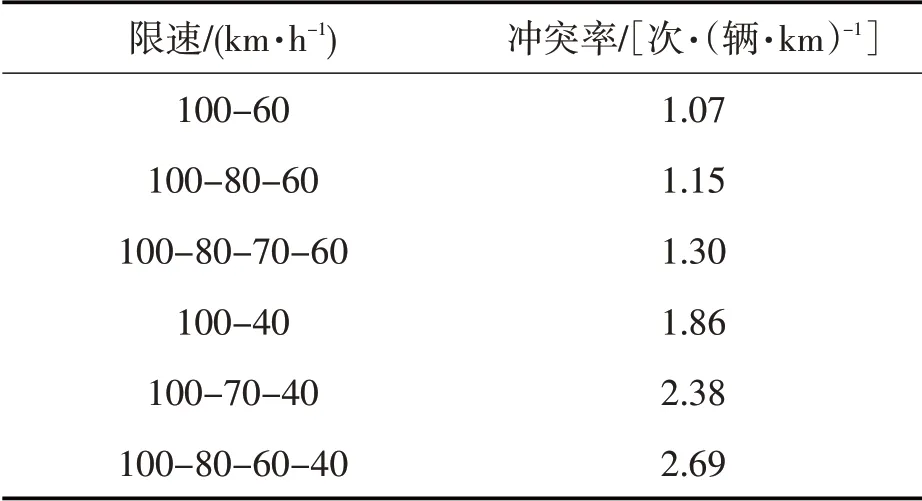
表1 设计速度100 km/h公路养护警告区冲突率
交通量为1800 pcu/h,设计速度80 km/h公路养护作业区限速控制对警告区速度分布的影响见图4。采用一阶限速,当最终限速值比较小时,限速区尤其是上游过渡区将发生交通拥堵,甚至造成限速区上游路段车速小幅下降。采用二阶限速时,在700~900 m处车速发生震荡。当采用三阶限速时,进入限速区后,车速平稳下降,并最终达到限速值。

图4 设计速度80 km/h公路限速控制对警告区车速分布的影响
设计速度80 km/h公路养护作业区限速控制对警告区Devs分布的影响见图5。当最终限速值为40 km/h时,进入限速区后,Devs出现剧烈震荡,即使采用三阶限速方案,Devs最大震荡幅度仍超过0.15,若采用一阶限速,在进入限速前,Devs即出现小幅震荡。最终限速值采用50 km/h,一阶限速和二阶限速时,进入限速区后Devs出现小幅震荡,若采用三阶限速,限速区Devs震荡甚微,其值与限速区上游Devs几乎一致。最终限速值设定为60 km/h时,进入限速区后,Devs小幅下降后趋于平稳。
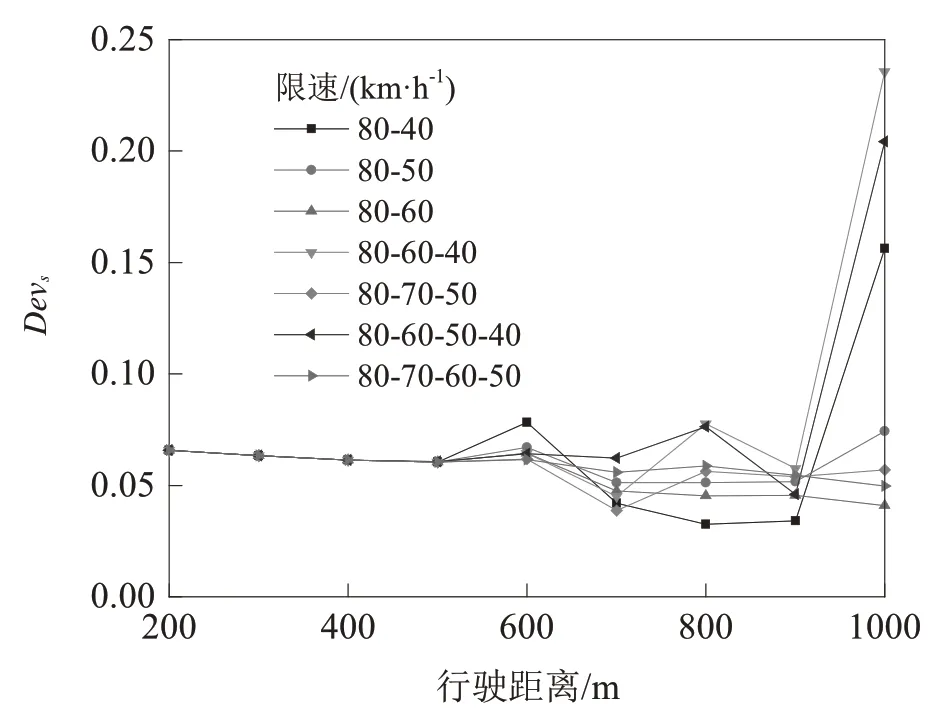
图5 设计速度80 km/h公路限速控制对警告区Devs分布的影响
设计速度80 km/h公路养护警告区车辆冲突率见表2。冲突率随着最终限速值的减小而增大。当最终限速值为40 km/h时,一阶限速车辆冲突率达到1.67次/(辆·km)。由于二阶限速增加了车速转换频次,导致限速区内车速出现震荡,致使冲突率反而高于一阶限速。当采用三阶限速后,降速平稳,冲突率较二阶限速有所降低,最终限速值为50 km/h时,冲突率仅为1.06次/(辆·km)。Devs和冲突率随着限速阶数和最终限速值的变化规律基本一致。为此,设计速度80 km/h公路养护作业区,在交通量较大时,可采用最终限速值为50 km/h的三阶限速方案。
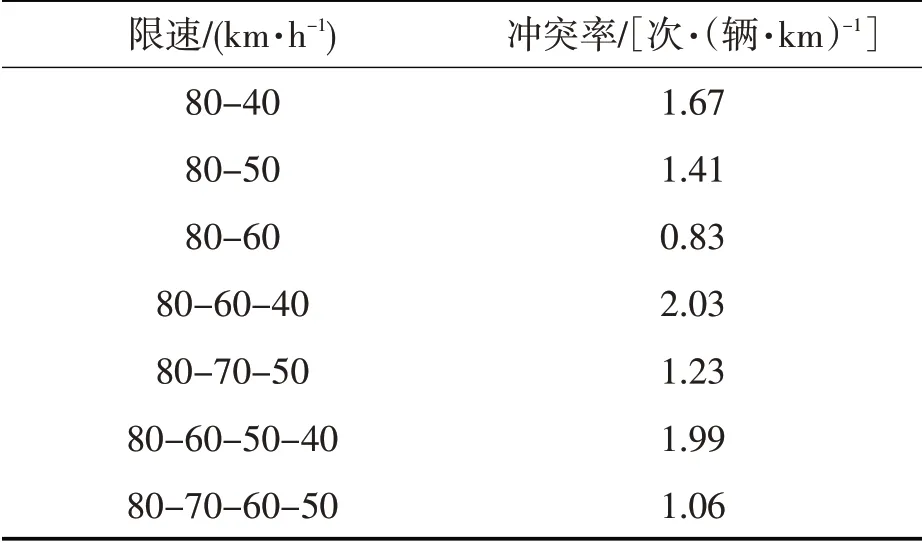
表2 设计速度80 km/h公路养护警告区冲突率
交通量为1400 pcu/h,设计速度60 km/h公路养护作业区限速控制对警告区速度分布的影响见图6。相对一阶限速和二阶限速,三阶限速时,车速下降更加平稳。警告区Devs分布随着控制速度的变化见图7。进入限速区后,Devs先上升后下降。最终限速值为30 km/h时,Devs震荡幅度较大,当最终限速值上升到40 km/h时,Devs震荡幅度有所减小,甚至小于最终限速值为30 km/h的三阶降速方案。警告区交通冲突率见表3。最终限速值为30 km/h和40 km/h,冲突率差别甚微,而随着限速阶数的增加,冲突率则有小幅上升。综上所述,设计速度60 km/h公路养护作业区,在交通量较大时,可采用一阶限速方案,最终限速值宜取40 km/h。
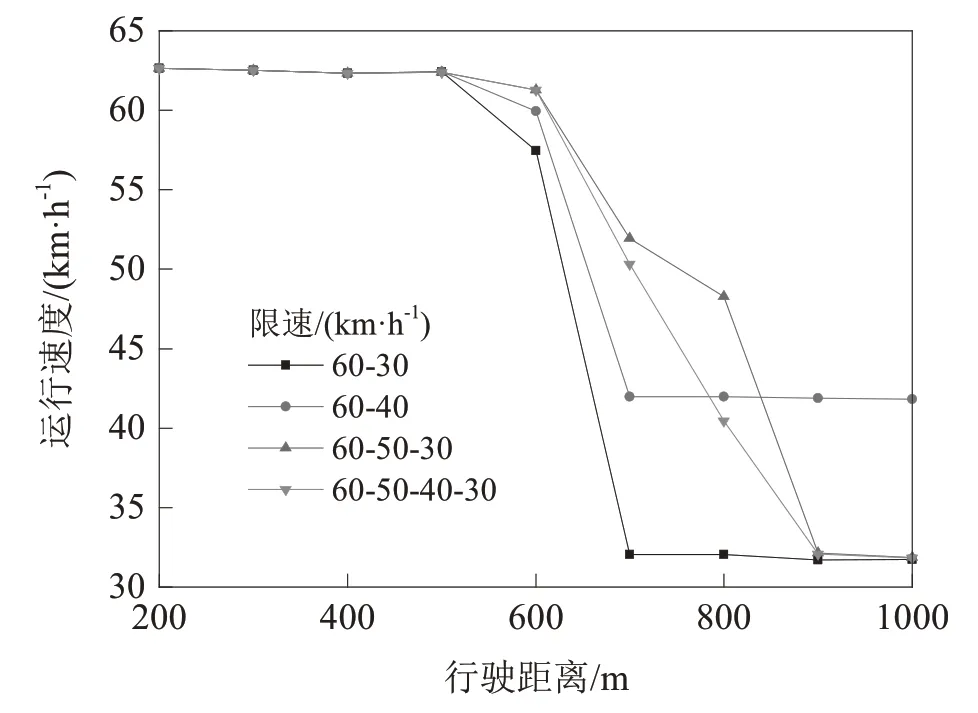
图6 设计速度60 km/h公路限速控制对警告区车速分布的影响

图7 设计速度60 km/h公路限速控制对警告区Devs分布的影响

表3 设计速度60 km/h公路养护警告区冲突率
交通量为1400 pcu/h,设计速度40 km/h公路养护作业区限速控制对警告区速度和Devs分布的影响分别见图8和图9。一阶限速,最终限速值为20 km/h时,限速区上游路段车速明显下降,这说明限速段及上游过渡区发生了交通拥堵。Devs震荡幅度从小到大依次为最终限速20 km/h的一阶限速、二阶限速、最终限速30 km/h的一阶限速。而表4则表明警告区冲突率从小到大依次为最终限速30 km/h的一阶限速、最终限速20 km/h的一阶限速、二阶限速。从Devs分布和冲突率来看,设计速度40 km/h公路养护作业区应采用最终限速20 km/h的一阶限速方案。但是最终限速为20 km/h则会造成显著的交通拥堵,为此,最终限速为30 km/h的一阶限速方案更为合适。
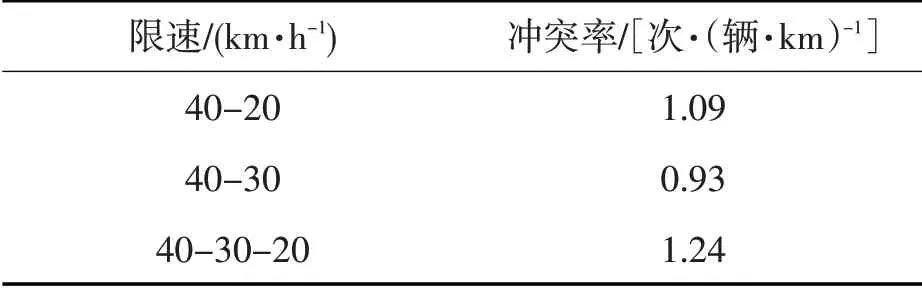
表4 设计速度40 km/h公路养护警告区冲突率
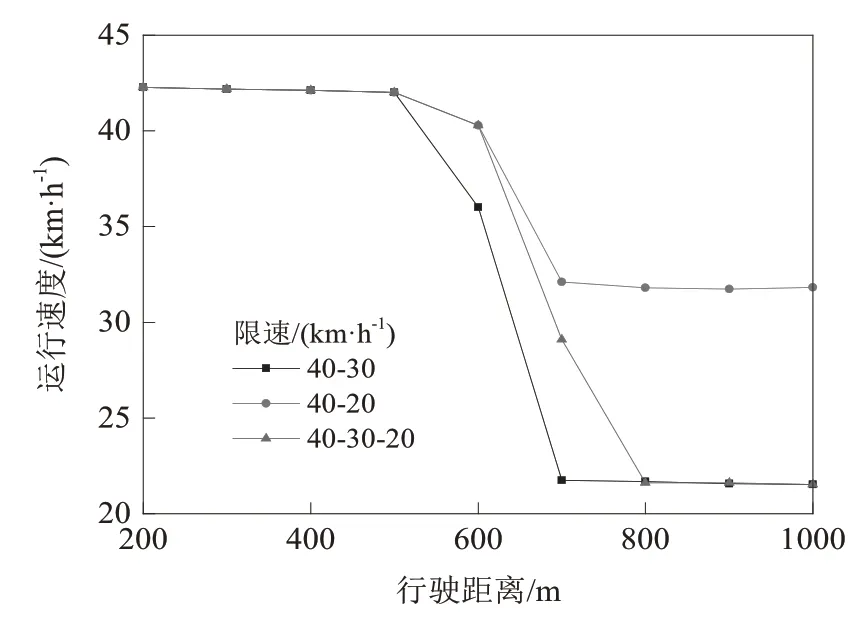
图8 设计速度40 km/h公路限速控制对警告区车速分布的影响
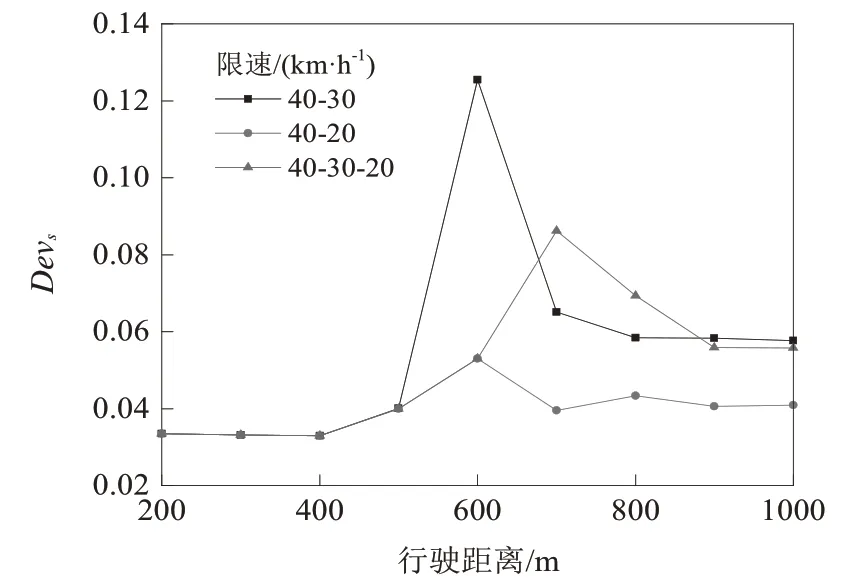
图9 设计速度40 km/h公路限速控制对警告区Devs分布的影响
4 结论
(1)低阶限速最终限速值过小将造成上游过渡区至限速区的交通拥堵,甚至引起限速区上游路段车速下降,而高阶限速有利于车速平稳下降至最终限速值。
(2)公路设计速度较高时,高阶限速方案警告区Devs震荡幅度甚微,冲突率较小。而公路设计速度较低时,高阶限速方案造成车速变化频次过高,Devs震幅和冲突率反而上升。
(3)公路设计速度为100 km/h和80 km/h时,警告区宜分别采用最终限速60 km/h和50 km/h的三阶限速方案,设计速度为60 km/h和40 km/h时,警告区宜分别采用最终限速40 km/h和30 km/h的一阶限速方案。