旱地作物机械化移栽关键技术研究现状与发展趋势*
2022-08-12张妮张国忠王姣李硕卢丽君董昭
张妮,张国忠,王姣,李硕,卢丽君,董昭
(1. 武昌首义学院机电与自动化学院,武汉市,430064; 2. 华中农业大学工学院,武汉市,430070)
0 引言
移栽又称移植,是将已培育好的幼苗移栽到大田的一种农艺,可增加土地复种指数,大幅提高作物产量及品质,机械化移栽可提高种植质量且降低生产成本[1]。采用移栽方式种植的旱地作物有粮食作物、经济作物和药用作物等三类,其中粮食作物有玉米等,经济作物主要有棉花、蔬菜、烟草、油菜等,药用作物有丹参等。以上三类相比而言,移栽种植方式在经济作物的运用最为广泛。
中国现阶段机械化移栽技术的研究起步较晚,目前市场上尚没有成熟的机型应用。以蔬菜种植为例,中国蔬菜产量约占世界蔬菜总产量的60%,2020年设施蔬菜种植面积达4 200 khm2,约有60%的蔬菜是采用育苗移栽种植,但机械化程度不高,目前仍以人工移栽为主。现有机械大多引进或仿制国外产品,其总体保有量较少,主要原因在于采用机械移栽作业时存在效率低、成本高、伤苗、易漏栽等问题,成为制约移栽机械化发展的关键因素,提高自动化移栽机发展水平迫在眉睫[2-4]。
机械化移栽主要包括前期的育苗准备阶段,苗盘输送、夹苗取苗、补苗与栽植等环节,文章阐述机械化移栽环节中这些环节的关键技术研究现状以及吊杯式、导苗管式、链夹式及挠性圆盘式移栽机的研究现状及市场应用情况,对旱地作物机械化移栽技术与装备研究发展趋势进行了分析,可为机械化移栽的深入研究和进一步发展提供参考。
1 机械化移栽关键技术研究现状
1.1 育苗质量及秧苗移栽特性
育苗是移栽的准备环节,目前育苗方式主要有穴盘钵体苗、裸苗、毯状苗和基质块苗[1]。为给机械化移栽提供理论基础依据和解决送取苗过程中存在的问题,专家和学者针对不同作物幼苗的生长质量、力学物理特性参数以及与送取苗装置的适应性进行试验研究。
在幼苗生长质量研究方面,对不同幼苗的长势参数评价指标有苗株高、株干鲜重、茎粗、茎叶鲜重、叶片理化性,根系根长、活力、体积质等[5-8]。张硕等[5]分别通过试验得出黄瓜苗的株高、茎粗和植株干鲜重受基质成分和配比影响显著;黄瓜苗的根系根长、根体积受基质类型、配比、压实度影响大;黄瓜苗的株高、茎粗和茎叶鲜重与施肥时营养液浓度相关。朱传霞等[8]研究油菜生长过程中叶片理化性质和根系活力受不同硼硒营养液浓度影响大。
在秧苗力学物理特性参数方面,为提高取苗机构抓取可靠性,童俊华等[9]研究得出适当的钵苗夹持角度、取苗爪结构以及基质成分配比可提高抓取成功率。金鑫等[10-12]研究得出机械移栽时钵体破损率、取苗成功率主要受钵苗的基质配比和力学性能、取苗装置取苗角度、速度及夹取力影响。针对油菜方形压缩基质块苗的基质易出现破损问题,胡乔磊等[13]进行试验研究,得出基质块苗在特定的成分配比、压实度、营养液浓度以及特定的传送速度和取苗频率的条件下移栽效果最佳。韩绿化等[14]以黄瓜穴盘苗对象,针对夹钵过程中钵体的力学特性开展试验研究,得出钵体抗压能力随夹取的深入越来越强,夹紧力的最佳取值可超过生物屈服点;夹取部位应位于根系紧密区,可减少钵体破损率。
综上,基质成分配比、压实度及营养液浓度等是影响钵苗力学特性及幼苗生长质量的主要因素,从而显著影响移栽质量。钵苗力学物理特性的试验研究可利用质地分析仪和测力装置,开展夹持力试验、碰撞试验和基质压缩等试验,分析力学规律或构建力学模型,如:苗茎秆破断力,钵体Burgers模型蠕变特性,钵体抗压特性,钵体脱盘阻力特性等,并根据移栽的夹取方式不同(夹钵式或夹苗式),选取不同的试验方式,通过试验优化获取移栽机末端夹取器的形状、结构、材质、夹取部位、角度和深度等参数。
1.2 苗盘输送技术
苗盘输送是实现自动化移栽的重要技术环节[15],目前国内研究略显不足,现有研究分三类:机械式、机电气联动、机器视觉。其中较多地采用机械式,利用横向和纵向间歇送盘,同步协调工作,定位精度受制于零部件累计误差[16]。机电气控制联动式,一般由步进电机或步进气缸,PLC控制系统、位置传感器,辅助定位机构、同步带或传动链等组成,靠步进电机或气缸驱动同步带移动,产生的脉冲信号控制苗盘移动。机器视觉可识别空穴,但由于成本较高且对振动敏感,主要应用于温室穴盘的平面二维定位。
国内研究多集中在第二类机电气联动。崔魏等[17]基于齿轮五杆机构获得取苗爪运动轨迹设计出精准横向、纵向间歇送苗机构,实现精准取苗。国外生产的RTW系列移栽机[18],其输送系统采用宽辊道,可同时移栽四盘秧苗,由气缸驱动方式推送苗盘,输送系统效率较高。日本研制PT6000型移栽机器人[19],苗盘输送装置将幼苗输送到拔苗器下方,光电传感器可检测识别是否缺苗,控制系统为单点触摸式控制面板,且带有自诊断装置,若无缺苗则进行幼苗定点取放,该移栽机器人智能化程度较高。
综上所述,为提高效率,整排式取苗为今后研究趋势;输送过程中的精准定位、准确供苗是实现移栽机送苗自动化的关键技术,特别是大田试验中由于机构本身和行走振动,对持续精准定位和供苗是较大的考验。国外移栽机智能化程度较高,但结构和控制系统复杂,成本高,较难适应我国的中小型种植规模。
1.3 夹苗取苗技术
国内对夹苗取苗机构的研究较多集中在取苗执行机构和夹苗末端执行器两方面。
许博等[20-21]针对油菜纸钵苗移栽机开发出气动插入,多杆式联动取苗机构,如图1所示,末端执行器采用两根取苗针插入式,台架试验的取苗成功率为92%。王蒙蒙等[22-23]设计的蔬菜移栽机采用了曲柄摆杆式夹苗机构,性能试验结果为钵体破碎率为4.2%,综合取苗成功率为95.8%。童俊华等[9, 24]穴盘移栽末端执行器的选择上分别采取了指针式和指铲式两种方式对苗钵基质进行抓取。并通过离散元模拟基质在穴盘孔中的自然沉降,通过仿真试验分析不同含水率和基质配比下受力的变化情况。试验得出最佳含水率为60%、基质配比为6∶3∶1时对劣苗的钵体基质平均剔净率为70.8%。
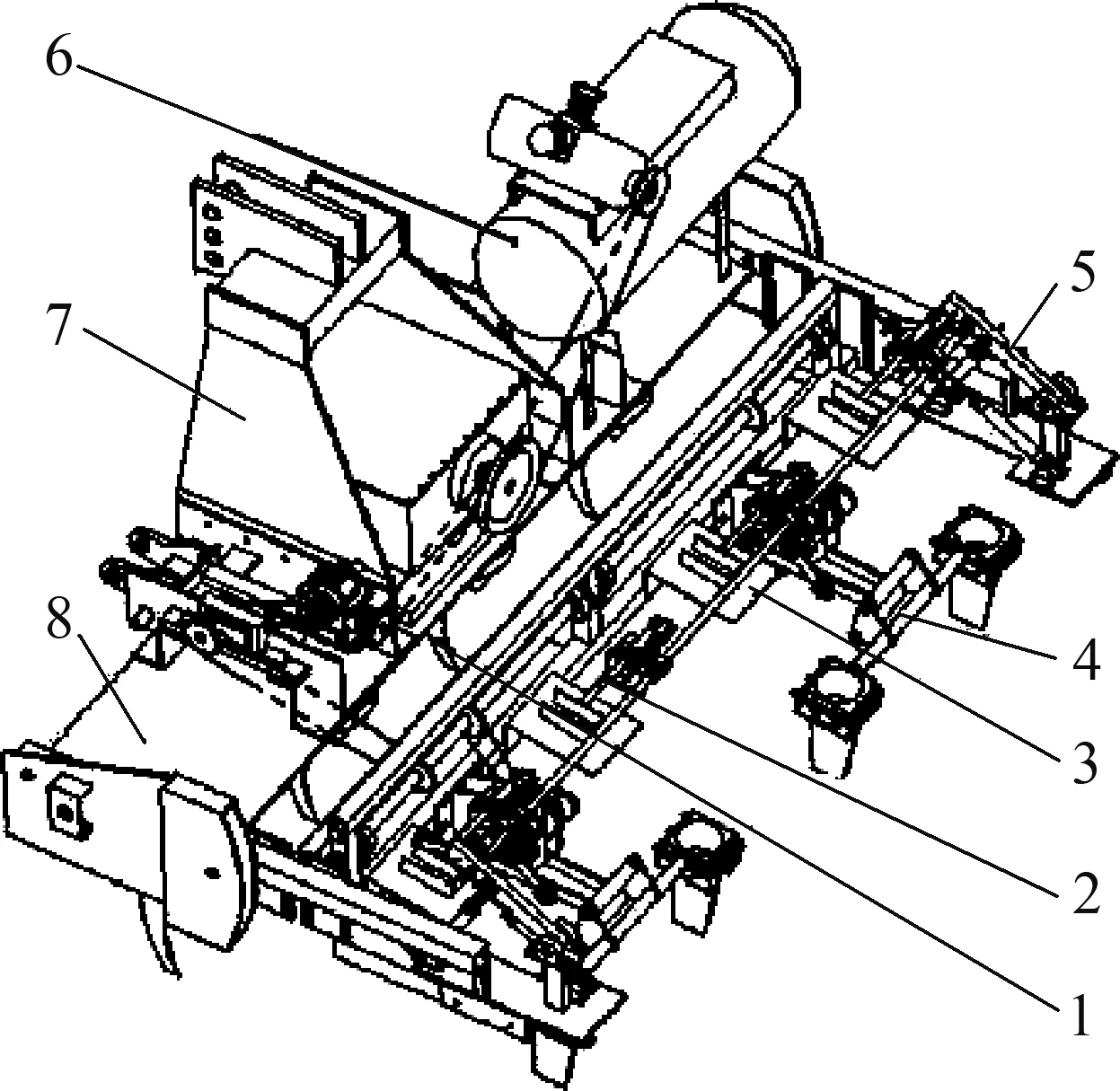
图1 油菜纸钵苗移栽机Fig. 1 Rape paper pot seedling transplanter1.旋耕装置 2.取苗末端执行器 3.钵苗放置装置 4.栽植机构 5.取苗机构 6.空压机 7.悬挂装置 8.机架
蒋卓华等[25]鉴于常规插拔式和夹取式设计出插拔夹取式末端执行器,采用单气缸驱动,通过试验得出一定的基质配比、含水率、单株基质质量下,移栽成功率达到100%,基质块的损伤率为17%。梁喜凤等[26]设计的补苗末端执行器工作对象为嫩小子叶钵苗,取苗和补苗成功率均为100%。潘杰等[27]设计指夹式取苗爪,基于EDEM-RecurDyn进行优化,试验得出取苗成功率96%以上,钵体破碎率为0。韩绿化等[28]设计出用于钳夹式移栽机的两指四针取苗末端执行器,试验得出苗钵含水率水平显著影响根土破坏,而入钵角度、深度及根系等因素对根土破坏无显著性影响。韩豹等[29]设计的针式末端执行器采用四根插入针,针之间间距可调,由直流电动推杆驱动,以钵体完整性为目标用离散元模拟仿真试验统计了脱落在穴孔内的颗粒质量,分析了加速度、穴盘规格、边距比对基质颗粒脱落的影响,试验得到钵体完整率为97.97%,取苗失败率为0.81%。上述文献中,童俊华等[9, 24]运用离散元仿真,分析取苗过程中苗钵体的物理特性,为夹苗取苗机构设计的优化提供了较为深入的理论基础,其研究手段值得借鉴。
国外夹苗取苗机构的研究起步较早[30],Choi等[31]研发的自动取苗机构为固定滑道式,驱动方式采用多杆机构,驱动杆为曲柄,连杆带着穴盘苗移动,滑块上安装有2个取苗针,取苗针的位置和姿态由摇杆和滑道控制,取苗成功率为97%;Ryu等[32]研制的取苗机构为直线滑台式,采用气缸驱动,取苗成功率为98%左右。
综上所述,现有夹苗末端执行器,根据夹取部位分夹钵式和夹苗式两种;根据夹取末端结构有针式、铲式等;根据取苗动作可分为夹取式、插拔式、顶出式及复合式,其中插拔式一般是插入到钵体基质深处,动作的选取对于钵苗的损伤至关重要,应结合取苗机构,分析其受力原理选取适合的方式[33]。取苗中存在的主要问题在于取苗装置对钵苗损伤率高,作业效率不够高,通用性和自适应性差。台架试验性能效果较好,但由于田间环境复杂得多,田间试验性能往往不够稳定,故研发周期拉长,市场应用开发进展较慢。
1.4 补苗及栽植技术
温室苗盘自动补苗环节的研究主要集中在钵苗视觉识别和作业路径规划。吴俭敏等[34]进行了苗盘钵苗自动识别研究,将移栽机的漏栽率降到了12%;贺磊盈等[35]基于贪心遗传算法对穴盘苗补苗路径进行优化,得出该算法所规划的补苗路径比全遗传算法可缩短33.8%~41.3%;杨振宇等[36]利用机器视觉检验钵苗的直立度和高度,用以判断是否适栽;童俊华等[37]针对温室穴盘钵苗稀植移栽分别作了基于遗传算法和贪心算法的移栽路径优化。王永维等[38-39]通过获取穴盘苗的图像并进行缺苗检测,判定正确率为100%。
栽植机构按原理可分为开苗沟式、打穴式和鸭嘴栽插式。开苗沟式和打穴式分别需要提前开沟和打穴,再进行栽植。开苗沟式一般利用铲形开沟器提前开出一条沟壑,再将秧苗均匀地输送至沟内,最后进行掩埋固定,垂直率难保证,且易挂苗。相比之下打穴式可提高移栽质量,但打穴和栽植两个动作需精准并协同配合,对控制系统要求高,结构上较为复杂,目前鲜少应用。目前鸭嘴栽插式栽植器应用较多。
2019年许春林等[40]设计出Hermite插值非圆齿轮行星轮系草莓钵苗移栽机构,用一套回转机构完成取苗、输送、挖穴与栽植4个工序,取苗成功率92%,移栽成功率85%。万霖等[41]对水稻插秧机改进了送秧机构、分插机构、植苗和定苗机构以及行走机构,研制出小型蔬菜移栽机。新疆农业大学研制的自动移栽机,取苗装置通过气动控制取苗作业,每个取苗单元由一排取苗指组成,取苗指与苗盘钵苗间隔对应,通过夹取钵苗茎秆方式取出钵苗。与该取苗方式相似的还有山东金利达公司的田耐尔牵引式自动穴盘移栽机,使用PLC电气控制系统,可实现苗盘的自动连续输送,采用的是吊杯式栽植器,自动化程度较高[41-42]。
欧美自动移栽技术较为成熟,机型偏大型化和智能化,其主要执行机构形式大部分为气动,以及电液驱动。意大利Fabrizio等[43]基于DGNSS-RTK技术与液压装置结合研制出全自动葡萄移栽机,该机经半悬挂圆盘移栽机改造而成,特点是适用性强,可在丘陵和山区作业无需预先整地,效率较高。控制系统配备内置激光器(以保持行距相等)和连续线缆系统(作为同步集),通过DGNSS-RTK控制端计算葡萄树的移栽位置,由电液元件执行实现全自动化。
综上,自动补苗和路径规划是提升移栽机智能化水平的关键技术:(1)利用视觉检测,替代智能化程度不高的光电传感器检测,采用图像识别苗高、直立度判别秧苗的合格率以及计算漏栽率;(2)补苗取苗的路径规划,优化计算机算法。中国这方面的研究尚处于初级阶段,与移栽机的配合程度及应用性有待提高,需进一步探索实用性。
可借助的现代手段和方法:在前期建模设计完成后,可以优先针对秧苗取出和栽植两个关键过程,利用Matlab通过数学模型公式计算得到某点的理论轨迹曲线,结合ADAMS分析其机构原理,进行机构动力学分析,得到秧苗运动轨迹仿真工作轨迹,提取秧苗的运动姿态,进行物理样机虚拟仿真,对部件机构及工作参数进行优化;后期研制出样机后,借助高速摄影录像采集,结合图像分析软件,得到实际的运动轨迹,与仿真模拟出的轨迹,以及理论轨迹曲线三者进行对比,验证仿真理论及仿真试验的真实度,并进一步利用虚拟实验得到的最佳因素组合,进行样机台架试验和田间试验,得到样机的试验结论和移栽成功率、株距合格率、漏栽率、深度合格率、直立度合格率等移栽质量参数。
此外可利用有限元仿真软件EDEM分析,机械化移栽中两个关键过程:(1)取苗时,苗钵体与工作部件如夹苗爪相互作用关系下,钵体内基质颗粒的完整性或损失率;(2)落苗时,钵体落入穴孔土壤中,钵体基质颗粒于土壤颗粒之间的相互作用机理,及其对栽植质量的影响,例如栽植深度和垂直率。目前针对取苗过程的物料特性研究较多,但对钵体苗落入土中过程的物料特性对移植质量影响因素的研究较少。可利用EDEM软件,仿真模拟钵体入穴的过程,探究秧苗或钵体内基质等对象与土壤间相互作用机理,分析苗钵与田地土壤相互作用,从而分析其特性因素对秧苗状态的影响,如直立度及栽深,为装置设计提供理论依据。
2 移栽机装备现状
移栽机按栽植器的结构形式不同可分为吊杯式、导苗管式、链夹式及挠性圆盘式,其适用性及特点对比见表1,部分代表机型的关键技术参数如表2所示。
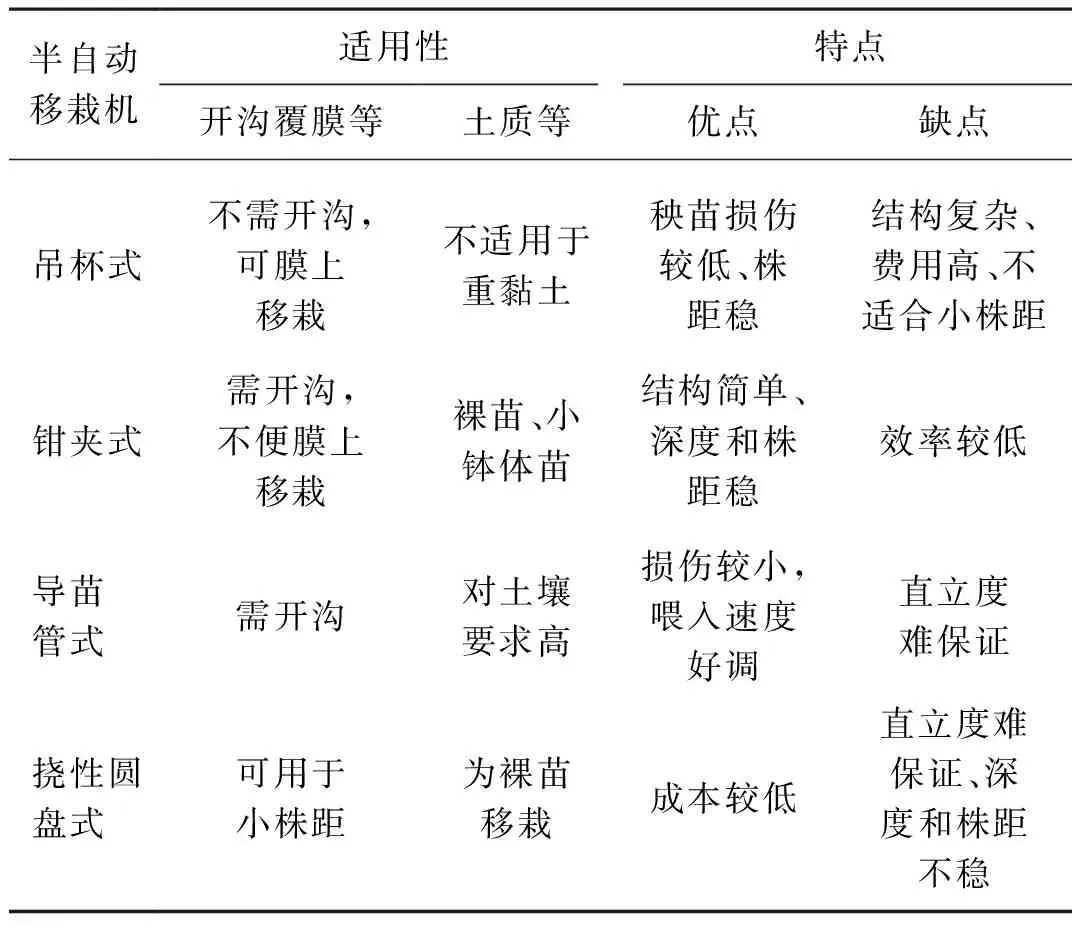
表1 4种半自动移栽方式的特点Tab. 1 Characteristics of four transplanting methods

表2 部分代表机型技术参数Tab. 2 Parameters of partial representative equipments
2.1 吊杯式和钳夹式移栽机
吊杯式移栽机在市场上应用最广泛,根据栽植器结构不同可分为转盘式、行星齿轮式和多连杆式[44]。钳夹式有圆盘夹式和链条夹式移栽机[45]。两者工作原理均是秧苗随栽植器作回转运动,高处人工喂苗,低处植入土壤,不同的是,吊杯式秧苗是靠自重落入苗穴[46-47]。鸭嘴式和吊杯式移栽机的栽植器较相似,鸭嘴式的驱动分摆臂式和行星轮式两种。鸭嘴的张合可通过带复位弹簧的弯头和凸轮控制,凸轮的推程轮廓接触弯头压缩弹簧,使鸭嘴张开,回程时弹簧复位鸭嘴闭合。
吊杯式和钳夹式两大类代表机型国内外最多,如图2所示,日本PVHR2型[48]双行膜上栽植机为摆臂鸭嘴式移栽,采用投苗杯下方的齿轮驱动8个苗杯圆周运动,并结合凸轮多杆件传动使鸭嘴按“腰果形”的轨迹做往复运动,可延长接苗时间,实现零速投苗保证直立度,当苗杯转动到鸭嘴栽植器上方时,苗杯的下端盖打开,幼苗落入栽植器中,两个栽植器上下交替接苗和植苗,移栽的直立度较好,栽植器形成的穴口小,可避免地膜被刮破。

图2 PVHR2型蔬菜移栽机Fig. 2 PVHR2 vegetables transplanter
HOTECH的鸭嘴式四行移栽机如图3所示,人工将幼苗投入栽植器中,每行6个栽植器圆周均布,由链条驱动旋转,鸭嘴转到最下方由拨杆打开,依次旋转植苗。
吊杯式和钳夹式移栽机的关键技术之一在于实现零速植苗,可借助ADAMS模型对栽植器的位移轨迹和速度进行分析,分析鸭嘴式栽植器的水平运动速度为0的时刻,此刻植苗,破土面积最小,直立率也最高[49-52]。
此外,入土之前钵苗在栽植器的运动过程是先与内壁面接触碰撞下滑,期间还有平面运动,对栽植质量有较大影响,该过程的理论分析是栽植器的结构参数设计的重要依据。
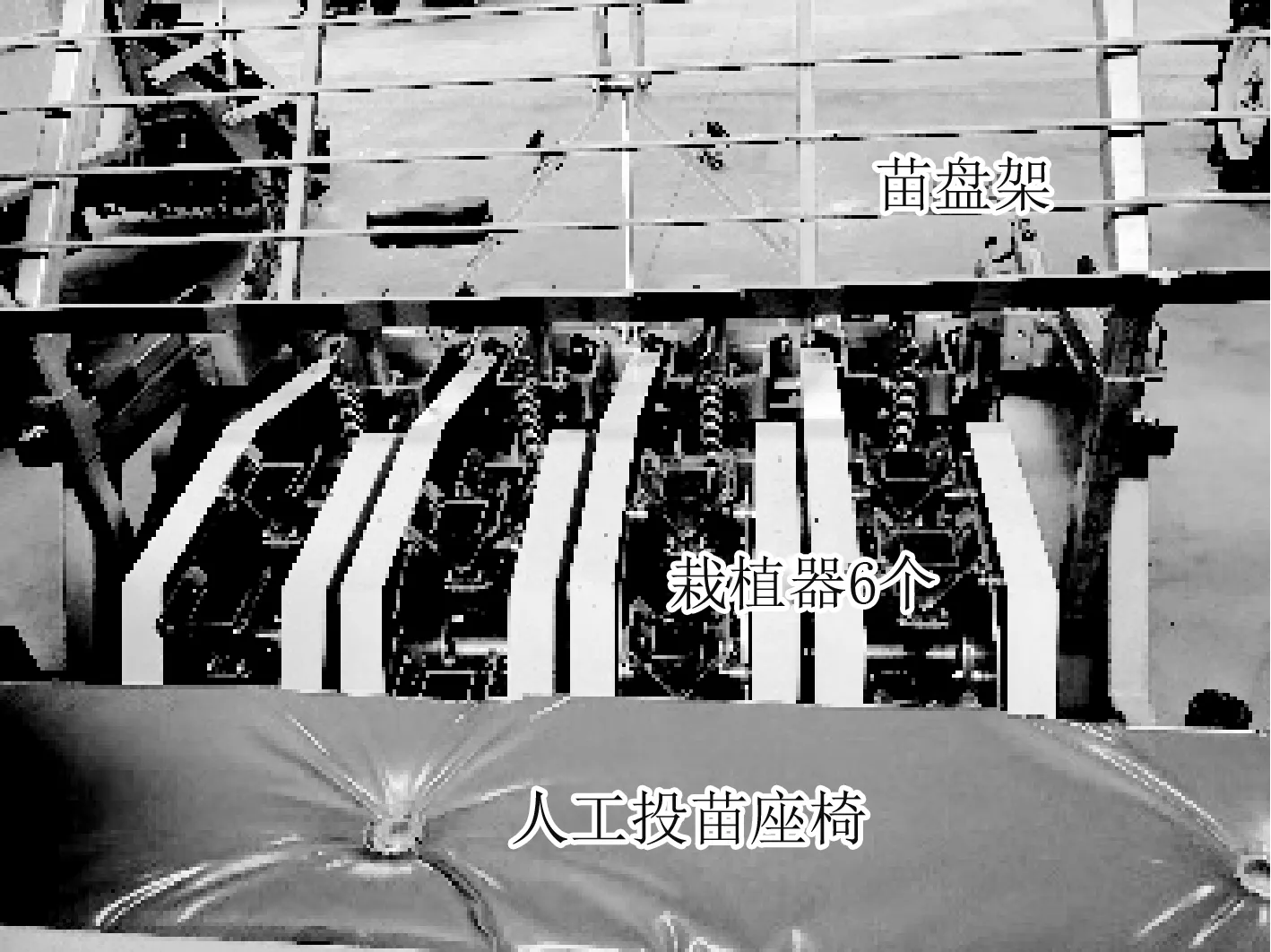
(a) 四行人工乘坐投苗

(b) 6个栽植器圆周运动图3 HOTECH鸭嘴式四行移栽机Fig. 3 HOTECH four rows transplanter with duckbill
2.2 导苗管式移栽机
多功能导苗管式移栽机,由人工将苗盘架上的苗盘移放至输送带,工作时,由移栽机前方的推土铲平地,开沟器开出苗沟,搅拌好的肥料由肥箱经下方管道排入苗沟。与此同时,上方输送带已将钵苗运送到导苗管管口,苗体在自重下沿管内壁滑落,由导苗机构直接栽植,或苗下落到导苗管最下端时,支架转动使栽植器到达最高位置,接到苗体后往下转动到最低位置时在弹簧装置的作用下打开植苗。栽植器在上升过程中,弹簧收缩,将栽植器末端合拢,最后覆土,注水器洒水,完成移栽[53]。
国外对于导苗管式移栽机机型研制较为成功,代表机型多,均已推广使用。例如英国Florida移栽机,美国Model 6000移栽机,意大利FAST系列移栽机等。国内导苗管式移栽机机型较少,且停留在试制阶段,市场化应用较少。主要有黑龙江农垦科学院研制的2ZB型移栽机和中国农业大学开发研制的2DF导苗管式移栽机等。
2.3 挠性圆盘式移栽机
挠性圆盘式移栽机由人工将幼苗摆放至送苗装置,在传送带作用下送苗装置夹持幼苗垂直向下运动,两片柔性圆盘在上端时张开夹持幼苗,至地面沟槽内时放苗移栽。该类移栽机的关键技术为宜栽区间的确定,可借助Adams软件编写挠性圆盘投苗过程的仿真脚本,验证其仿真过程与实际过程是否吻合。同时对栽植过程中幼苗的运动轨迹方程及曲线,幼苗轨迹为余摆线,两个零速栽苗点形成的区间为宜栽区间,田间试验的检验评价指标为幼苗直立度、栽苗合格率、伤苗率[54-55]。
上述4种半自动移栽机部分代表机型如表2所示。欧美发达国家农业可连续耕作地块面积大,其移栽机偏向大型智能化联合作业,融合电控、液压、气压等技术,机型适于在大块田地多行作业,其制造成本较高,不符合中国国情,引进较少[56-58]。日本三大品牌小型移栽机在中国占据市场份额多,作业行数有1~6行不等,性能稳定,但价格较高。半自动移栽机械化技术在国内外研究较为成熟,机型多样。国内仍以半自动移栽为主,工作效率较低,功耗相对较大,依赖人工手动喂苗,易造成漏栽,且效率较低,不足国外的一半。国内市场需求大,但移栽机研制成本高,且多以机械结构为主,性能不够稳定。
3 存在问题及发展趋势
3.1 存在问题
由于中国种植模式多样,标准化低,农机与农艺融合度有待提高,研制出的自动移栽机较少,实际应用较少,且移栽机械化技术缺乏一定创新性,关键机构设计需要突破,自动化移栽技术的研究急需推进。
1) 农艺没有考虑宜机化,重视程度低。机械化移栽本身对农艺的要求较高,我国旱地作物的播种、育苗等机械化程度不高,农艺不规范,例如沟宽、垄矩、起垄方式以及温室大棚的结构设计等没有考虑宜机化,这对移栽机的适应能力提出较高的要求。
2) 中大型移栽机推广较慢,研发制造成本高。由于国外农业多为大农场模式,尤其是欧美国家,设计的移栽机体型庞大,制造成本高,价格昂贵。从研发制造情况看,移栽机研发周期长且人力和资金投入高,影响农机企业研发投入的积极性,而科研院所的研发与市场并没有很好地结合起来。从市场推广情况来看,我国多为小农户种植,分布广而散,一般农民负担不起,小型号的机型更适宜于我国作物的种植模式。
3) 易破损,幼苗损伤大。损伤主要集中在取苗和栽植两个关键环节,尤其是取苗机构作为移栽机最核心的部件之一,其主要问题为取苗成功率低、漏取、幼苗受伤、钵体易破损等,直接影响了整机移栽质量。幼苗的损伤率以及栽后长势一直是评价种植机械性能的重要指标,移栽伤苗、漏栽不可避免,可以采取补苗措施,将损失降低至可接受范围之内。
4) 结构复杂,智能化程度低。传统的移栽机结构复杂,较多地采用复杂的机械传动方式,易造成幼苗损伤问题。农田环境复杂多变、作业对象差异性较大使得其移栽质量下降。随着电子电气技术的发展,电气传动、液压传动等将使移栽机械向着智能化的方向发展。
3.2 发展趋势
1) 农艺、农机与农信融合发展。随着农业信息化、智慧农场和“互联网+”等技术的快速发展,农业传感器技术、精细农业技术和物联网技术等综合应用于作物长势监测、种植检测、系统决策等环节,提高了资源利用率和工作效率。实现农机、农艺和农业信息技术的深度融合,能有效提高种植机械的智能化水平。
2) 现代技术的运用。离散单元法、虚拟样机技术、高速摄像技术等现代技术的运用为自动化移栽机的取苗、送苗、栽植等过程研究及其机理阐释提供了很好的手段。研究人员除开展机构动力学理论分析外,还可利用上述仿真软件开展虚拟试验研究,同时配合高速摄影技术对虚拟试验结果进行验证,从而优化机构设计参数,提高装备的可靠性和移栽作业质量。
3) 移栽关键技术。对钵苗的生物学特性和力学特性的深入研究可为移栽的夹取苗机构设计提供理论基础,此外可开展幼苗植入土壤过程的试验研究,从而对栽植器参数进行优化设计。目前取苗机构研究较多,但对送苗环节研究不足,整排式取苗及移栽可以大幅提高移栽效率,配合整排是多株钵苗同时栽植的送苗机构急需推进,是将来的研究趋势。
4) 机型创新性、通用性待突破。移栽关键技术过于依赖国外现有的结构,缺乏创新性。目前典型的吊杯式、导苗管式、链夹式及挠性圆盘式成熟的移栽机型,各有利弊,适用性差别较大,可考虑融合这些机型已有机构,或结合某些环节的创新性设计,从而研制出通用性更高的机型。
5) 移栽的高效化。为加速移栽机高效化、自动化进程,中国开始探索式地进行整排式穴盘苗移栽机的研究,但多集中于整排式多株钵苗的取送苗研究,对于与栽植器的配合工作欠考虑,且鲜少考虑苗盘更换机构,相关的控制系统往往在室内试验效果好,大田复杂环境下缺乏可靠性。提高移栽高效化且稳定性是移栽机将来发展趋势。
6) 移栽机的智能化。视觉检测和图像处理等先进计算机技术的发展较快,将其运用于移栽前钵苗的质量判别、移栽的路径规划,以及移栽后作业的质量检测,检测方面如果可以实现闭环性质的实时动态检测调整,提高机型智能化也是一大趋势。
7) 移栽机器人技术。移栽机器人技术成为当前的研究热点和趋势,但是相比嫁接、采摘除草机器人的发展仍滞后。目前难点在于自动取苗、送苗、投苗等关键环节的集成设计。控制系统可采用单片机程序、PLC程序及Fuzzy-PID控制等,配合气动系统、行程开关、输送装置的协同,利用传送带、图像采集相机和机械手夹持机构,这些部分的集成和技术的深入研究,都将推动移栽机器人技术进一步发展。
8) 移栽作业无人化。自动导航技术与移栽机结合,该技术在大面积作业的水田已经得到应用,水稻插秧机无人驾驶技术相对已经成熟,但旱地移栽对象一般为非经济型作物,应用少,相关的研究也鲜少有人开展,随着自动导航以及无人驾驶技术的进步,实现移栽无人化作业是未来发展趋势。
