根茎类中药材收获机械化应用及研究现状*
2022-08-12于庆旭曹光乔陈彬刘燕龚艳陈小兵
于庆旭,曹光乔,陈彬,刘燕,龚艳,陈小兵
(农业农村部南京农业机械化研究所,南京市,210014)
0 引言
经济作物主要包括油料、茶叶、糖料和中药材等,在人们的日常生活中扮演着重要角色,对整个国民经济的发展和社会稳定起到了关键作用。中药材作为特种经济作物,其经济效益较高,不仅可以起到脱贫攻坚、乡村振兴作用,而且中药材在疫情防治中起到了显著作用,中药材行业迎来发展新机遇[1]。我国是中医药发源地,中药在我国已经有千年历史。全球对中药材的需求逐年增长,其中根茎类中药材品种在流通市场占比最高,2021年11月份中药材市场共监测1 445个品规种类的中药材,其中根茎类中药材共440个,占比最高达30.45%[2]。收获是关键环节之一,我国根茎类中药材收获机械化水平较低、生产效率低,严重制约了根茎类中药材产业的发展,中药材收获机的需求日渐加剧,根茎类中药材收获机械化水平的提高,对缓解农村劳动力和提高药农收入具有重要的意义。本文针对根茎类中药材主要种植现状,简述我国根茎类中药材收获机械化应用现状,以及关键部件挖掘机构、分离机构和输送机构研究情况,分析根茎类中药材收获机械化存在的问题和发展趋势,为我国根茎类中药材收获机的研究提供参考,以促进根茎类中药材收获机械化水平的提高。
1 我国中药材种植现状
中药材发源于野生资源,但随着社会的发展、科学技术的进步,野生中药材资源越来越少,已经无法满足社会的需求,随着中药材驯化种植,目前人工栽培种植的中药材已成为了中药主要来源[3]。中药材从野生为主到栽培为主,从零星分布到大面积连片种植,中药材种植面积呈现连年持续增长的态势,2011—2020年中药材种植面积如图1所示。据国家中药材产业技术体系统计,2020年全国中药材种植总面积为5 864 khm2,我国每个省(区、市)几乎都种植中药材,由于各地区地理环境及气候不同,中药材的种植品种各异,中药材种植面积也不均衡,云南、贵州、四川的种植面积分别为582 khm2、474 khm2、467 khm2,河南、湖南、广东、广西、甘肃5个省份种植面积在300~333 khm2,山西、山东、湖北3个省份种植面积在200~267 khm2,陕西、河北、辽宁、吉林、黑龙江、安徽、江西、海南、重庆9个省份种植面积在133~533 khm2,内蒙古、江苏、新疆3个省份种植面积在67~133 khm2[4];2019年有统计数据的59种常用大宗中药材种植总面积为1 364 khm2,12种中药材种植面积突破33 khm2,其中黄芪、丹参等根茎类中药材种植面积超过67 khm2,黄芩、党参、当归、柴胡、山茱萸、苦参等根茎类中药材种植面积超过33 khm2[5]。为了进一步提升中药材的质量,农业农村部、国家药品监督管理局、国家中医药管理局印发了《全国道地药材生产基地建设规划(2018—2025)》,道地药材是指某个地区特有的传统优质效佳药材,目前我国有7大道地药材产区,分别为东北、华北、华东、华中、华南、西南和西北道地药材产区。
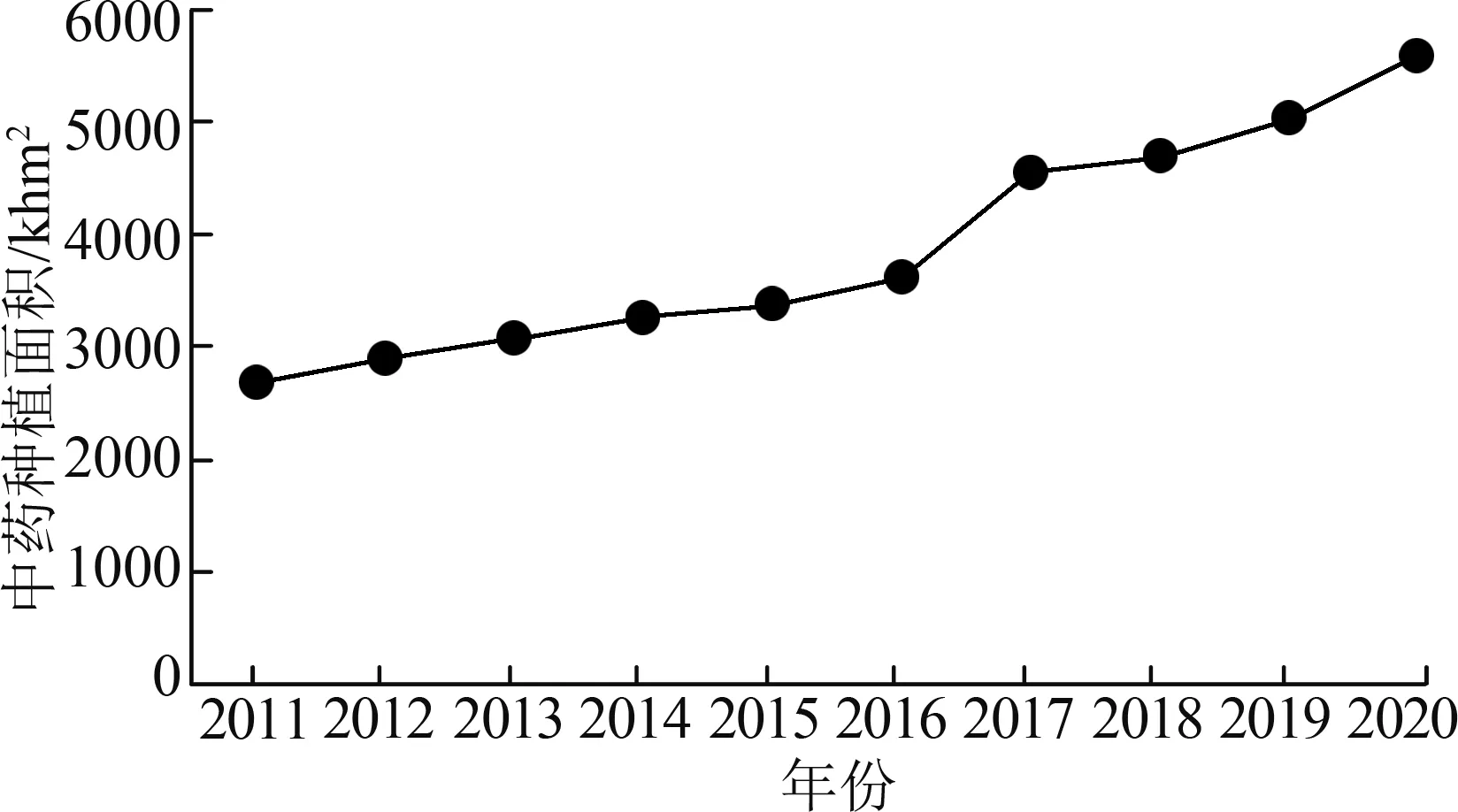
图1 2011—2020年中药材种植面积Fig. 1 Planting area of Chinese herbal medicine from 2011 to 2020
2 根茎类中药材收获机械化应用现状
根及根茎类中药材通常简称为根茎类中药材,是指主要入药部分(根部、根茎、鳞茎等)生长于土壤下的中药材,不同根茎类中药材因其品种、生长环境等因素的影响,具有不同的形状长度、生长深度,根据形状长度可以划分为长根茎类、短根茎类和块状根茎类等,根据生长深度可分为浅根茎类(生长深度小于20 cm)、中根茎类(生长深度20~40 cm)和深根茎类(生长深度大于40 cm)[6]。目前根茎类中药材分纯人工收获、半机械化收获和机械化收获3种,丘陵山区生产的根茎类中药材还主要依靠人工收获;半机械化收获是采用改装的犁具等进行挖掘翻土,再进行人工根土分离和收集作业,铧犁式中药材收获机有4GJ-700型、4Y-300型、4Y-30型和4UY-20型等[7];机械化收获是指使用机械完全代替人工完成根茎类药材的挖掘、根土分离和收集等作业,机械化收获分为分段收获和联合收获。目前根茎类中药材收获机分为挖掘机和联合收获机。挖掘机是指完成根茎类中药材挖掘,并将根茎与土壤分离、铺放或集条于地表的机具,收获性能指标要求明茎率≥90%、深松率≥95%、伤损率≤5%;联合收获机是指完成根茎类中药材挖掘,并将根茎与土壤分离、分级、收集等的机具,按结构型式分为牵引式、悬挂式和自走式,收获性能指标要求挖净率≥95%、伤损率≤7%[8]。
目前国内中药材收获机生产企业较多,主要集中在河北省、山东省和甘肃省等地区,市场上主要是中小型的根茎类中药材收获机,其中挖掘机的结构简单、制造成本较低,市场占比份额较大,应用范围较广,可实现对党参、黄芪、黄芩、丹参、桔梗、天花粉、白芷、辣根、板蓝根等多种根茎类中药材的挖掘收获,但针对深根茎中药材还依然存在挖掘阻力大、功率损耗大、挖掘深度不够、收净率低和破损率高等现象;自走式联合收获机是未来发展的趋势,但其机构复杂、制造成本较高,价格昂贵,市场占比份额相对较少,目前主要用于收获贝母、元胡、半夏、太子参等浅根茎类中药材。
3 根茎类中药材收获机械化研究现状
中药材主要种植于我国,国外针对根茎类中药材收获机械化的研究较少,韩国、美国、加拿大和俄罗斯主要针对高丽参、西洋参等浅根茎类中药材的收获机进行研究[9],日本研发了几款深根茎中药材收获机,其中日本苫米地技研工业株式会社发明了一款TG系列牛蒡收获机[10],日本株式会社小松制作所研制了一款YCD-60PM型锯齿式山药收获机[11]。
目前国内大量学者对根茎类中药材收获机进行了研究,陈威[12]研制了一台自走式太子参联合收获机,针对挖掘铲和振动筛进行试验研究,采净率和破损率可达到96.56%、6.12%,可用于丘陵山区太子参收获作业;李增玺[13]研制了一台百合收获机,针对挖掘铲和升运器进行优化试验,得到最佳工作参数组合,损失率和损伤率分别为2.31%、1.82%,可适用于东北地区百合种植模式;宋江等[14]针对东北地区贝母种植模式,改进了4B-1200型平贝母药材收获机,将损失率和损伤率分别降低至3.8%、2.9%;何晓芬[15]研究设计了一台小型折耳根收获机,针对挖掘铲和输送分离装置关键部件进行设计,以适合我国西南方山区、丘陵地区小面积土地的折耳根收获使用;张文杰[16]针对西北道地产区,研究设计一台4Y-1200型药材收获机,可适应于黄芪、红芪、党参、甘草等深根茎类药材的收获;谢新亚[17]研究设计了一种适合新疆地区甘草种植模式的甘草收获机,可一次性完成甘草的挖掘、输送、分离、铺地等作业;昆明理工大学张兆国教授团队[18-22]研发了悬挂式、牵引式和自走式等多款三七收获机,可适用于云南丘陵山区、温室工厂等不同场景的三七收获作业。
目前主要参考马铃薯、胡萝卜、花生等收获机进行改进,通过试验研究挖掘机构、分离机构和输送机构,提高根茎类中药材收获机作业质量,以适用于不同地区、不同种植农艺要求的根茎类中药材收获作业。根茎类中药材收获机主要由机架、挖掘机构、分离机构、输送机构、收集机构等组成,根茎类中药材收获机结构简图如图2所示,其中挖掘机构、分离机构、输送机构为主要关键部件。随着自动化、智能化农机的发展,根茎类中药材收获机也将增加自动化、智能化技术,关键部件的结构参数和作业参数将随作业条件自适应调控,提高根茎类中药材收获机的普适性。
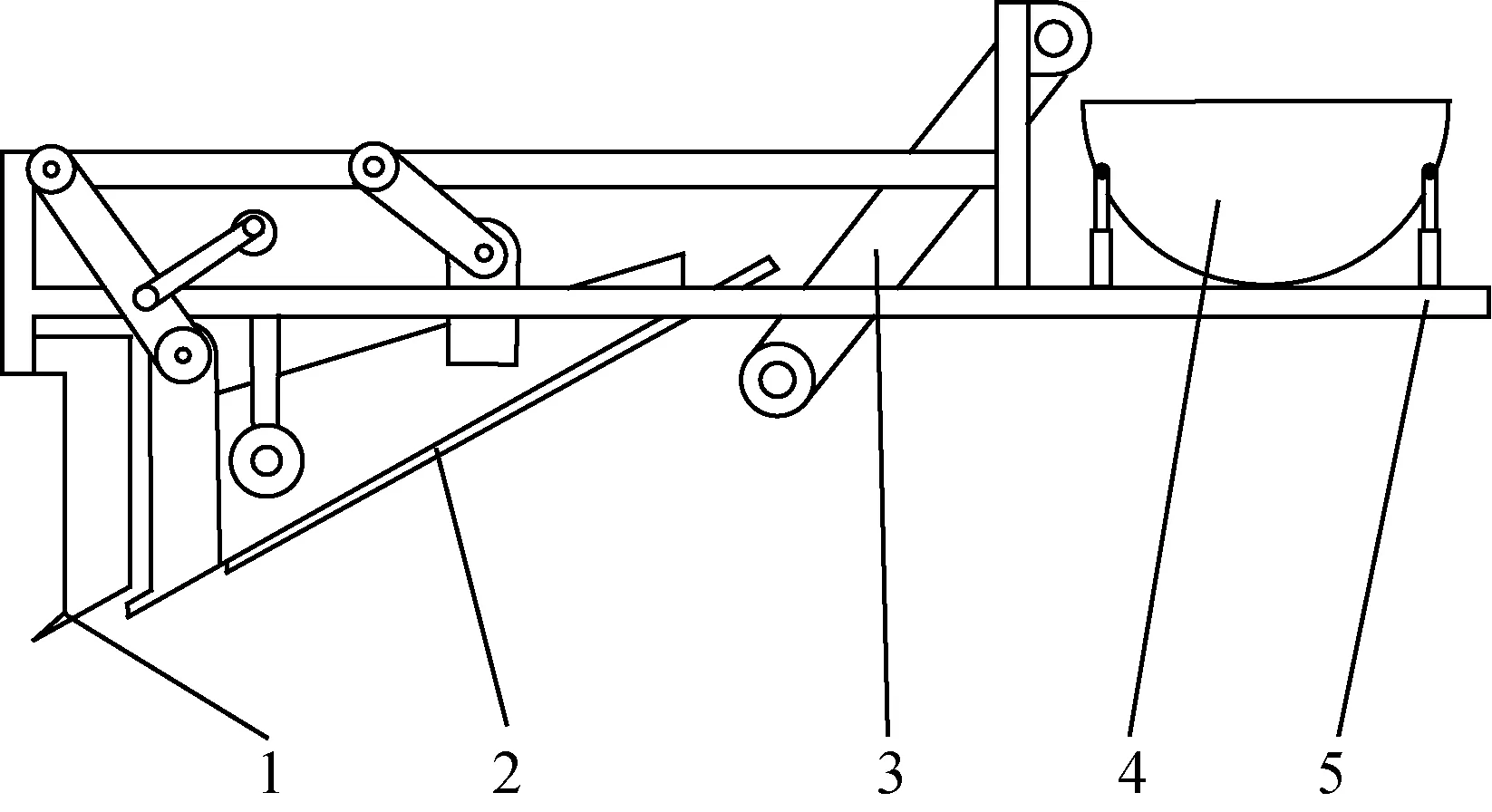
图2 根茎类中药材收获机结构简图Fig. 2 Structure diagram of Rhizome Chinese herbal medicine harvester1.挖掘机构 2.分离机构 3.输送机构 4.收集机构 5.机架
3.1 挖掘机构研究
许多根茎类中药材的根系发达,分布于土壤深层,根系与土壤形成团聚体,根系起到加强筋作用,增强土壤抗剪切强度和根土分离难度[23],为了保证根茎类中药材的完整性,挖掘机构的作业深度须大于药材最大根深,在挖掘过程中会产生大量的根土混合物以及杂草,要求挖掘机构不仅具有较大的作业深度和良好的入土性能,同时还需具有一定的土壤破碎分离功能[24]。
3.1.1 挖掘铲
挖掘铲对土壤直接施加作用力,将坚实的土壤破碎、疏松和将团粒结构破坏,起到切削、破碎土壤作用,避免大量土垡造成拥堵现象,同时降低挖掘阻力,因此挖掘铲直接关系到收获质量。为了适应各地区不同的挖掘条件,我国各地科研机构研发出众多类型的挖掘铲以适应当地环境和挖掘条件,查阅相关文献[17-18, 24-27],依据挖掘铲平面形状可分为平面铲、曲面铲、叉齿铲和组合铲等,挖掘铲类型如图3所示。
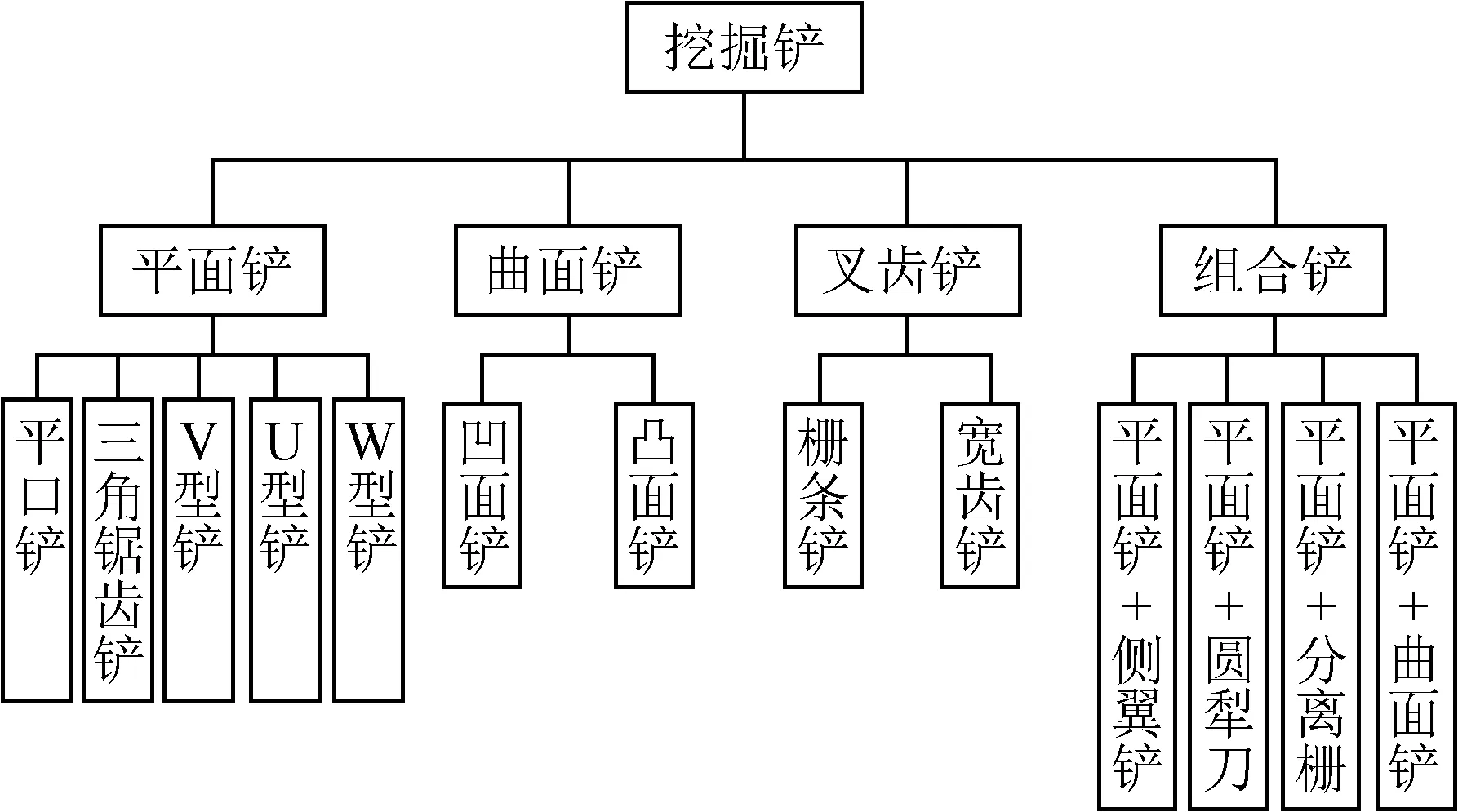
图3 挖掘铲类型Fig. 3 Shovel type
王锋等[28]针对机收黄芪时三角平面铲挖掘效果不佳且易损坏问题,通过仿真试验和田间试验,研究确定三角平面铲最优倾角;陈威等[29]针对太子参联合收获机的三角平面铲,进行理论计算、仿真计算和土槽试验研究,确定工作性能较优的参数组合。目前主要将蝼蛄、巨蜥、砂鱼蜥、穿山甲、狗獾、黄毛鼠、鼹鼠等作为仿生原型,研制不同类型仿生铲;周梦渊[30]针对黄芪机收研发一种仿生挖掘铲,选用蝼蛄前足爪趾作为仿生对象,进行了仿生学结构优化,通过仿真试验对比,优化后铲片的最大应力、形变量都有所下降;郎冲冲等[31]针对三七种苗挖掘铲挖掘阻力大、碎土性能与减黏性差等问题,运用仿生学原理,对穿山甲前爪中趾和鳞片进行结构分析,将仿生铲表面设计成有凸起的楔形铲面,设计一种三七种苗仿生挖掘铲。昆明理工大学张兆国团队[32-33]为解决挖掘铲前易壅土的问题,设计了一种组合式挖掘铲,在不同作业速度和挖掘深度条件下,组合铲的水平和垂直阻力皆小于传统挖掘铲,可降低三七收获机工作能耗和阻力。
平面铲构造相对简单、紧凑、实用、便于制造,且入土容易,目前应用最广;曲面铲一般结合仿生技术,铲面的曲面特征仿制动物挖掘器官表面,起到减黏降阻效果,同时提高使用寿命,但表面特征及制造工艺复杂;叉齿铲入土容易,减小了铲面与土壤的接触面积,可减小挖掘阻力及牵引阻力,且易于碎土和分离土壤,但可靠性较差,容易折断叉齿和折弯栅条等;组合铲具有良好的碎土分离效果,减少挖掘阻力并降低铲前壅土,但结构复杂。随着加工制造技术的进步,根茎类中药材挖掘作业深度和作业速度等要求不断提高,对于深根茎中药材,需克服挖掘过程中易壅土、挖掘阻力大等缺点,结合仿生技术的组合挖掘铲将成为趋势。
3.1.2 挖掘机构
挖掘机构依据挖掘铲运动形式分固定式、驱动式和组合式等。固定式挖掘机构与机架部件组成刚性连接,一般主要由挖掘铲和铲架构成;驱动式挖掘机构工作时,其传动结构比较复杂,挖掘铲在动力的驱动下做往复运动和旋转运动等;组合式挖掘机构包含两种或两种以上不同类型的挖掘机构。
固定式挖掘机构和振动式挖掘机构应用于根茎类中药材收获较多,旋转式挖掘机构和组合式挖掘机构相对较少,有研究将旋转式挖掘机构应用于马铃薯收获[34]。朱昊杰[35]新设计了一种适用于元胡的固定式挖掘机构,收获作业前可调节不同的入土角,通过EDEM离散元仿真研究在不同入土角和不同作业速度的挖掘阻力情况。振动式挖掘方式是一种有效降低阻力的途径,国内外研究者通过理论分析和试验研究了振动式挖掘方式的减阻机理,可分为强迫式和自激式两种振动方式[36-39]。
浅根茎类中药材收获机主要采用固定式挖掘机构,固定式挖掘机构结构简单、制造及维修容易、可靠性较高,依然存在挖掘深度不足、入土阻力大、功率损耗严重、碎土效果差等问题;深根茎类中药材收获机主要采用强迫振动式挖掘机构,可有效减小挖掘阻力,具有良好的碎土分离效果;目前组合式挖掘机构其结构复杂、制造困难,能够适应多种挖掘环境,未来可用在自走式联合收获机上,适用于深根茎类中药材收获。
3.2 分离机构研究
分离机构同时具有输送作用,作业时需承受的载荷较大,据研究马铃薯收获机要分离的土壤达70%~80%[12, 40],许多根茎类中药材的挖掘深度远大于马铃薯,土壤喂入量较大,因此对根茎类中药材分离机构的性能要求更高。目前根茎类收获机上广泛采用的分离机构类型有升运链式、分离筛式、滚筒式等。
3.2.1 升运链式
升运链式分离机构也称作为杆条式升运器,主要由杆条、链条和振动器等组成,依据链条结构型式,可分为链杆式、钩杆式以及带杆式等。李增玺[13]针对百合输送分离时损伤现象,设计一种带杆式升运器,通过离散元仿真进行损伤机理研究,明确机具的前进速度、升运器带速以及升运器倾角等工作参数范围。申世龙等针对丹参机械化收获,设计一种链杆式清土输送装置,为了增加输送链的清土效果,设计有振动链轮,以实现输送链的振动,可将挖掘后的丹参实现参土分离,同时将丹参输送至输送装置中。目前升运链式分离机构的理论研究较多,技术较成熟,其具有较强的分离能力,并在倾角较大时仍具有良好的输送能力,被广泛使用,但使用过程中磨损速度快,部件易于损坏,从而造成机器故障率较高。
3.2.2 分离筛式
分离筛式分离机构主要由分离筛和驱动机构组成,分离筛的种类较多,依据分离筛的运动形式可分为振动式、摆动式等,依据筛面结构形式可分为杆条筛、锯齿筛、编织筛和组合筛等。马川等[41]研发的平贝收获机采用偏心轮式振动分离筛,通过对振动机构运动学分析,利用Matlab优化工具箱对振动机构核心参数偏心轮的转速和半径进行优化,降低平贝机械化收获损伤率;张泽璞[11]针对板蓝根机械收获,设计了一种具有筛条—筛板组合式筛面的摆动式根土分离筛,并对其关键部件偏心机构、双摇杆机构、组合式筛面结构进行设计,分析根土复合体相对筛面正向滑动、相对筛面反向滑动、相对筛面发生抛掷运动的条件,研究得到影响收获效果的主要因素为筛面倾角、曲柄转速、曲柄半径。振动式分离筛结构简单、性能稳定,在根茎类收获机上经常被使用,摆动式分离筛存在惯性力平衡不足的问题[42],但其承受载荷大、碎土性能较强和分离性能较好等,能把筛面上的混合物快速向分离筛尾部输送,其输送效率较高。
3.2.3 滚筒式
滚筒式分离机构具有受力均匀、故障率低、使用寿命长和能量消耗少等优点,但其结构复杂,加工制造困难[34, 43]。王密[44]设计了一种带有扬料板的滚筒式分离机构,用于平贝母机械化收获,通过液压马达驱动滚筒旋转,实现滚筒的无级调速,滚筒筛内装有一定角度的扬料板,不仅有利于物料在滚筒内向后输送,而且还能起到翻转物料的作用。滚筒筛分离机构可适用于短根茎类、块状根茎类中药材,但需在含水率和粘黏性较低的土壤中进行筛分作业。
3.3 输送机构研究
输送机构主要作用是输送转移物料,可附带分离和分级功能,在薯类、花生等联合收获机应用较多,且技术较成熟,根据输送级数可分为一级输送、二级输送和多级输送[45],根茎类中药材的输送机构参考薯类输送机构改进或直接引用,主要有网带输送式、刮板输送式、辊筒输送式等。陈威[12]研发的太子参联合收获机选用网带输送式输送机构,网带的两侧为链条,链条与传动轴上的链轮相配合进行传动,调节输送网带的松紧度,在工作过程中网带能够产生一定自激振动,有利于进一步将细小土粒分离,研究表明最佳倾角在20°~30°。刮板输送式依据结构形式可分为带式刮板输送式和链条刮板输送式,王密等针对4B-1200型平贝母机械收获过程中,黏湿土壤易进入带式刮板输送机构的输送带内侧,引起侧滑和堆土现象,重新设计了一种链条刮板式反向升运器,通过理论分析的方法确定了升运器结构参数和工作参数,倾角为45°,线速度0.26 m/s,升运效率提升了2倍。谢新亚[17]针对新疆地区甘草机械化收获,设计一种辊筒输送机构,由传动链轮、输送辊筒、机架和链轮护壳等组成,其中输送辊筒周向均布安装4排刮板及钉齿,钉齿与刮板成45°夹角焊接,起到破碎土壤和向上输送甘草作用,经过理论计算和试验分析得到最佳机构参数和工作参数:辊筒直径 60 mm、倾角为15°、辊筒转速255 r/min。
对于不同物理特性和形状尺寸的根茎类中药材可采用不同形式的输送机构,需保证输送效率,同时防止中药材与输送机构缠绕,造成根茎类中药材损伤。目前短根茎类和块状根茎类等一般采用网带输送式、刮板输送式等,长根茎类中药材一般采用刮板输送式、辊筒输送式等。
4 存在问题
目前国内学者对根茎类中药材收获机进行了大量的研究,中药材收获机械化还处于起步阶段,根茎类中药材与主要粮食作物的收获机械化水平相差较大,在根茎类中药材收获机实际应用中,依然存在挖掘阻力较大、收净率低和破损率高等现象,制约收获机械化水平的因素较多且复杂,主要存在以下问题。
1) 农机农艺融合程度不足。根茎类中药材的品种繁多,即便相同品种在不同地区的种植方式和农艺要求也不同,有直播、移栽种植方式,有半覆膜、全覆膜、膜上栽培、膜侧栽培、开沟、起畦和起垄等农艺要求,导致机械化收获的要求也各异,给配套收获机械带来较大难度。
2) 联合收获机械的研发积极性不高。根茎类中药材主要种植丘陵山区、零散地块等,受地理环境的影响及制约,主要以手扶拖拉机等动力机具配套微小型收获机具作业,通用联合收获机械无法施展,企业研发根茎类中药材收获机的积极性不高。
3) 收净率和破损率缺乏系统性研究。由于各地区的土壤物理特性不同,土壤—根系的团聚体的物理力学参数和模型不同,不同根茎类中药材、土壤和机械之间的相互作用机理尚不明确,收净率和破损率在挖掘作业和分离作业中缺乏系统性研究,在机械化收获过程中收净率和破损率的关键影响因素尚不明确。
4) 收获作业的智能调控技术缺乏研究。对不同地区、不同品种根茎类中药材的挖掘机构和分离机构的作业参数要求不同,现有挖掘机构无法实时调节挖掘铲角度、深度和速度等作业参数,以降低工作阻力,分离机构无法根据根土喂入量实时调节振动频率、速度等作业参数,以提高分离效果,目前尚未对不同根茎类中药材收获作业参数的智能调控技术进行研究,主要依靠人工经验判断收获机具的作业参数。
5 发展趋势
随着小地块集中连片,逐步扩大中药材种植面积,正在由人工收获和半机械化收获向机械化收获转变,由传统挖掘机向联合收获机发展,目前需突破中药材农机农艺融合的关键技术,提高收获机的田间作业适应能力,最终逐步向智能化联合收获机发展。
1) 挖掘机构向低耗深挖技术发展,针对深根茎挖掘收获的挖掘深度不够、挖掘阻力大和功耗损耗严重等问题,进一步研究土壤切削破碎、挖掘机构功率损耗等机理,研发融合仿生技术、振动减阻技术的组合式深挖机构,实现低耗深挖新技术。
2) 分离机构和输送机构向柔性低损技术发展,针对不同土壤和根茎类中药材的物理特性,进一步分析分离机构和输送机构等损伤占比,加大机械化收获过程中根茎类中药材损伤机理的研究,研发各机构的柔性收获关键技术,以降低机械收获的破损率。
3) 收获整机向智能调控技术发展,针对不同种植模式和作业环境,收获机集成基于北斗导航的智能调控系统,实现挖掘机构、分离机构和输送机构等自适应调控技术,以适应不同根茎类药材、不同地区地形和不同田间环境的机械收获作业。
