无人机辅助的无线传感网络AoI最小化方案研究*
2022-08-11赵玉华贾向东胡海霞敬乐天
赵玉华,贾向东,2,胡海霞,敬乐天
(1.西北师范大学计算机科学与工程学院,甘肃 兰州 730070; 2.南京邮电大学江苏省无线通信重点实验室,江苏 南京 210003)
1 引言
近年来物联网产业飞速发展,极大地推动了无线传感器网络WSN(Wireless Sensor Network)技术的应用,针对WSN中存在的海量数据收集问题,无人机提供了一种辅助收集传感器设备移动式数据的手段,可有效节约传感器节点能量,延长无线传感器网络寿命。在此类应用场景中,远程数据处理中心根据无人机传回的传感器(即终端)状态更新数据估测物理现象。
文献[1]首先提出利用无人机UAV(Unmanned Aerial Vehicle)作为无线通信网络中继,设计了一个无人机的受控网络,建立一个地面传感器节点与无人机连接的网络,以保证无线传感器网络节点将感知产生的数据安全可靠地传送到无人机,继而传递给用户。文献[2]通过定义不同类型的节点和设备,提出了基于无人机的包括存储和转发的数据收集框架以及实时数据传输模型,提供了基于循环策略和需求驱动策略的无人机路由算法。文献[3]在多无人机无线网络场景中通过凸优化技术联合优化用户调度和关联、无人机轨迹和发射功率,实现了最大化所有用户最小平均速率的目的。该文献提出的基于凸优化的联合优化方案对本文具有较高的引导启发价值。
上述无人机辅助的无线传感器网络的目标是通过具有可靠的密集部署的传感器节点持续观察物理现象获取环境特征,精确的远程估计具有较高的实用价值。因此,所有类似应用都需要及时传递数据,因为最新的感测数据可以更好地捕获源节点所处的环境状态。反之,信息的价值随时间推移逐渐降低,过时的信息甚至可能导致错误的控制,造成重大灾难。因此,在状态信息更新要求较高的系统中,对信息新鲜度的分析研究具有重要意义。因此,文献[4]研究了无人机辅助的无线传感器网络中的信息新鲜度最优数据收集问题,提出了一种联合传感器功率分配和轨迹规划策略,基于邻近传播方法的感测数据,并利用动态规划找到满足传输数据最及时的无人机最优轨迹。
因此,对于时变系统的状态信息,以保持数据新鲜度为目标的信息更新系统的设计和分析一直受到广泛关注。在文献[6]中,信息年龄AoI(Age of Information)的概念首次被提出,用于度量信息新鲜度,利用M/M/1排队原理来表征车辆状态更新系统中的信息新鲜度。AoI被定义为信息自生成以来至到达目的地的最新状态更新所经过的时间,进而将模糊的追求数据新鲜度问题转换为一个可以用优化方法求解的数学问题。自此,近年来对AoI的研究兴趣迅速增长。与文献[6]不同的是,除了研究先到先得FCFS(First Come First Served)策略的3种不同排队模型(包括M/M/1、M/D/1和D/M/1)的开创性工作之外,文献[6]还给出了先到先得(FCFS)和后到先得LCFS(Last Come First Served)排队策略的平均AoI的比较分析。文献[7]研究了通信系统中信息更新的最优控制策略,提出了保持数据新鲜度的零等待策略。
文献[8]针对联合感知时间、传输时间、无人机轨迹和任务调度优化问题,提出了一种迭代算法来优化感知时间、传输时间和无人机轨迹,设计分析了无人机对多个传感任务执行数据更新的顺序,以及无人机传感和无人机传输之间的权衡。文献[8]还讨论了具有无线功率传输能力的传感器网络的AoI,其中传感器节点从射频信号中获取能量以传输实时状态信息,传感器节点在其电容器完全充电时产生更新,并利用所有可用能量传输。
综上所述,在文献[1-4,9]中,现有工作已满足传统传感器网络信息传输的基本需求,大多从轨迹优化、功率控制等方面为传统无线传感器网络中无人机辅助通信系统的吞吐量最大化及系统能效最大化等提供了解决方案。但是,随着物联网的发展,精准智能系统对监测数据即时性的要求越来越高,对数据新鲜度的研究已成为此类实时系统优化的关键。因此,基于文献[5-8,10-13]对于AoI概念模型及理论基础研究相对成熟的条件下,本文将现有AoI研究场景扩展至基于WSN研究中,提出将AoI度量建立在无人机辅助的无线传感器网络场景中,满足WSN网络的较高状态更新需求。且文献[5]表明,传感器节点在获取射频能量条件下更有利于优化系统AoI。
因此,本文提出了无人机辅助的无线传感器网络信息年龄最小化问题。具体场景为,多架无人机同时从数据中心出发,在传感器节点上空悬停收集传感数据并以射频方式向传感器节点输送能量,最终返回数据中心卸载信息。首先,本文构建了一架无人机辅助通信的无线传感器网络模型,无人机先悬停在最优悬停点为传感器节点传输能量,随后在给定的时间周期内频繁更新感知任务的数据。其次,提出了一种采集点选择、轨迹优化及能量输送时间与信息传输时间分配权衡的联合优化方案,以达到最小化系统总AoI为目的。最后,模拟了多架无人机在三维空间中的信息采集过程,并对能量输送时间与信息传输时间分配进行权衡。
在本文所述模型中,无人机不仅作为数据传输中继,并为旷野环境中布设的传感器节点供能。无人机飞行过程中的轨迹设计有效减少了数据中继传输时间,无人机对于传感器节点的供能机制提高了传感器的工作可靠性,满足其在电量饱和状态下的高效数据采集。同时,从解决系统远程数据传输与无线传感器网络节点能量受限问题方面优化系统AoI。与大量现有工作不同,本文提出通过对基于无人机辅助无线物联网系统的轨迹和时间分配的联合优化来实现系统平均AoI最小化。
2 网络模型及问题描述
2.1 网络模型
针对草原生态监测保护问题,如图1所示的无人机辅助无线传感器网络工作在远离城市的郊区空旷草原场景中,因此本文采用视距链路模型。且传感器节点布设在草丛中用于实时监测环境状态,因此其位置固定,高度为0。该模型由一个数据中心v0、S个传感器节点和K架无人机构成。其中K架无人机与S个传感器节点在同一频段上同时通信。无人机从数据中心v0起飞,飞到传感器节点上空首先为节点传输能量;然后传感器节点利用收获的能量将传感数据上传到无人机;最终无人机原路返回数据中心v0。传感器节点的位置用矩阵S∈R3×K表示,K架无人机的位置用矩阵U∈R3×K表示,则第k架无人机在时隙n时的位置用多元变量u[α,k,n]表示,其中,u∈U,u[α,k,0]和u[α,k,n]分别表示无人机出发前在数据中心的初始位置及无人机返回数据中心的最终位置。参数α表示无人机飞行过程中的约束条件,α∈{1,2,3,4},其取值含义在第2.2节具体说明。将无人机完成任务时间离散为N个等距时隙,即T=N×Ts,Ts为采样间隔,采样时序表示为{U1,U2,…,UN}。无人机完成任务的时间分为飞行时间与悬停工作时间,悬停工作时间又可分为下行能量输送时间tbe和上行数据收集时间tbi。且无人机速度未接近极限值,其多普勒效应可以忽略。
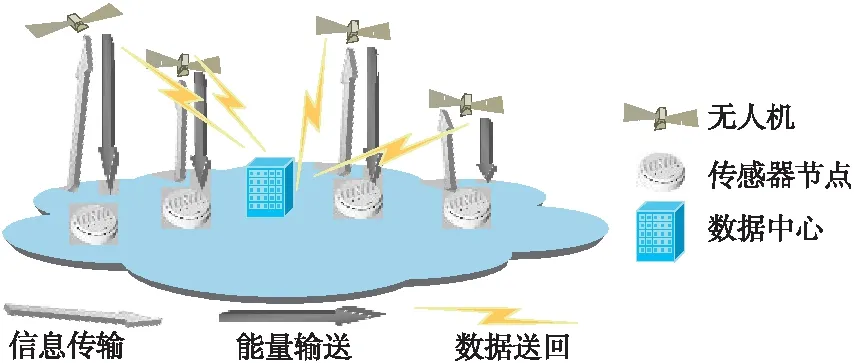
Figure 1 Network model图1 网络模型
2.2 问题描述
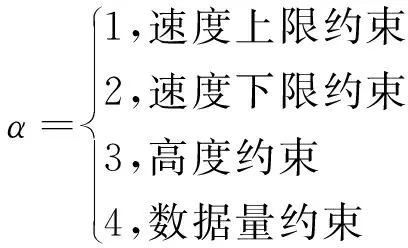
由于机动性和自由度限制,无人机飞行过程中在时隙n的位置需服从部分约束条件u[α,k,n],其中,α为约束变量,α取值由约束条件决定,即,
设无人机的最大飞行高度为Hmax,最小飞行高度为Hmin,则高度约束如式(1)所示:
Hmin≤u[3,k,n]≤Hmax
(1)
由于无人机的飞行速度有限,需要在任意2个连续时隙间隔内对第k架无人机的位置距离施加约束。将水平飞行速度、垂直上升和下降速度分别表示为vL、vA和vD,在本文中假设无人机上升下降速度相等,即vA=vD,则第k架无人机的位置约束如式(2)和式(3)所示:
‖u[1:2,k,n+1]-u[1:2,k,n]‖≤vLTs
(2)
-vDTs≤u[3,k,n+1]-u[3,k,n]≤vATs
(3)
此外,本文还需要考虑任何2架无人机的避碰问题。如果任意2架无人机之间的最小安全距离用dmin表示,则第k架和第j架无人机间的避碰约束如式(4)所示:
‖u[1:2,k,n]-u[1:2,j,n]‖≥dmin
(4)
无人机的传输功率必须是有界的。设p∈R3×K为传输功率矩阵,p[k,n]为第k架无人机在时隙n的传输功率,则功率约束如式(5)所示:
0≤p[k,n]≤Pmax
(5)
其中,Pmax表示无人机最大传输功率。p[k,0]和p[k,n]表示第k架无人机的初始和最终传输功率,在后续计算中,将它们设置为定值,而非决策变量。
在时隙n时,传输链路的信干噪比SINR(n)满足零均值高斯分布,则此时该链路上的数据传输速率R(n)如式(6)所示:
R(n)=WBlb(1+SINR(n))
(6)
其中,
(7)
其中,G0表示信号功率,WB表示带宽,N0表示加性高斯白噪声功率谱密度,d[k,k,n]表示无人机距离目的节点的距离,(a[k,k])2表示信道增益。
2.3 AoI描述

Δ(k)(t)=max(t-Uk)
(8)
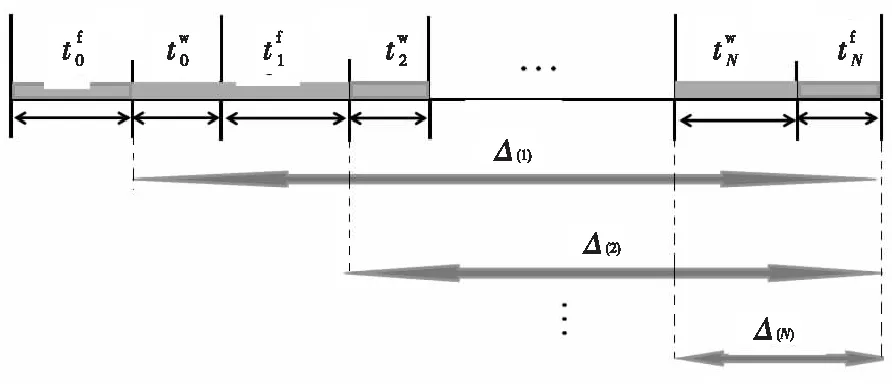
Figure 2 AoI timing diagram图2 AoI时序图

Figure 3 Hovering working time 图3 总悬停工作时间表示
根据图2和图3可以得出,第k+1次任务的AoI如式(9)所示:
(9)
(10)
由于未来收集数据的AoI与过去无关,但会影响观测时序,由图2可得出如式(11)所示的结论:
Δ(1)(t)>Δ(2)(t)>Δ(3)(t)>…>Δ(N)(t)
(11)
在N个时隙中无人机完成任务的平均AoI如式(12)所示:
(12)
则整个无人机辅助的无线传感器网络模型的AoI如式(13)所示:
(13)
3 问题构建与求解
为了尽可能满足信息中心接收到的信息新鲜度,本文提出以最小化K架无人机在n个时隙上的工作AoI为目标函数建立优化问题,如式(14)所示:

s.t. 式(1)~式(9)
(14)
在式(14)中,平均AoI表示悬停工作时间和无人机飞行时间的加权和。由于每个传感器节点的数据收集时间与无人机的飞行轨迹无关,问题P1被分解为2个子问题,即时间分配问题和最优平均AoI轨迹设计问题。假设M=t*为无人机在传感器节点上空能量输送时间与信息传输时间分配的权衡指数,因此找到最优时刻M即解决了时间分配问题,进而可推导出最优悬停位置u*[α,k,M+1]。假设无人机上升速度与下降速度相等,因此最优飞行轨迹对称,则问题可以进一步表示为式(15)所示:
(15)
引证文献[11]可以得出结论,式(14)涉及到求解最优M,这通常比较困难。通过观察,首先使用启发式方法求解最优M和悬停位置u*[α,k,M+1];然后使用固定M和u*[α,k,M+1]求解。由于在式(15)的目标函数中,当N≫M时,第1项比第2项小得多,因此省略式(15)的目标函数中的第2项来求解最优M和u*[α,k,M+1]的近似,然后将问题简化如式(16)所示:
(16)
由于:
(17)
则悬停工作时间式(17)可以转化为一个凸目标函数问题,如式(18)所示:
(18)


(19)
(20)
因此,关于目标函数式(18),可以找到一个全局线性下界。
(21)
其次,通过迭代使用二分法对M进行求解,可以首先找到使这个松弛问题可行的最小M,将其表示为ML。设ML为M的下界,多次使用平分法求解问题(15)对应的最优M值。约束式(3)满足任何2架无人机之间的避碰问题,对于该非凸约束问题,本文采用逐次凸逼近SCA(Successive Convex Approximation)算法[9]求解。利用柯西不等式将非凸约束式(3)代替为其凸紧代函数,如式(22)所示:
2(u[α,k,n]-u[α,j,n])T(u[α,k,n]-
(22)
最终,多次利用SCA算法,迭代求解出最优值p*和u*。
4 仿真实验与结果分析
在该仿真实验中,所有传感器节点在空旷草原生态系统中随机分布于地表,持续监测收集环境数据。无人机飞行至节点上空以悬停方式完成文中所述工作过程,并用Hmin初始化每架无人机到达节点上空的高度。该实验验证了方案的可行性,并对其性能进行了评价。在不失一般性的情况下假设K=4,其他参数如表1所示。
图4描述了无人机初始轨迹以及其初始高度变化。本文首先为每架无人机分别设计了一种初始路线,如图4a所示。在初始轨迹的设置中,每架无人机在飞行至传感器节点上空附近后首先上升到初始高度Hmin处,然后以最大的速度直接到达目的地上空,并在接近目的地的同时下降到最佳高度。完成采集任务时,所有无人机都将悬停在第3节求解所得的最优采集位置u*处,并在M时刻前完成能量传输,随后开始采集任务且以对称轨迹返回数据中心。假设4架无人机的初始位置分别为(0,0,100),(30,0,100),(0,30,100)和(30,30,100)。所有传感器节点布设于草原地表,因此其位置服从随机分布且高度为0。故其初始位置为(300,300,0),(100,100,0),(700,700,0)和(100,800,0)。所有无人机都采用最大传输功率Pmax与传感器节点通信。

Table 1 Simulation parameters表1 仿真参数

Figure 4 Initial trajectory design of UAV图4 无人机初始轨迹设计
图5给出了无人机的优化轨迹及其优化高度变化。通过代入如图4a所示的无人机静态悬停位置以及初始化无人机飞行轨迹,启动优化算法SCA,经过多次迭代得到如图4a所示的无人机最佳悬停位置和最优飞行轨迹。从图4b的优化结果可以得到,无人机在飞行过程中的最大高度始终低于初始轨迹。如图4所示,无人机1的初始位置最接近其目的地,因此与其他无人机相比,它到达目的地的时间最短。但是,当无人机1到达与其通信的传感器节点附近时,不会立即下降到其最佳高度,而是保持其高度,并等待其他需要更多飞行时间才能到达其通信传感器节点附近的无人机。然后,这4架无人机几乎同时下降到它们的最佳悬停点。因此,该飞行方案可以有效避免同时工作的多架无人机之间的噪声干扰。从优化的轨迹可以看出,该方案不仅避免了无人机之间的碰撞,而且还优化了无人机飞行轨迹之间的协作。
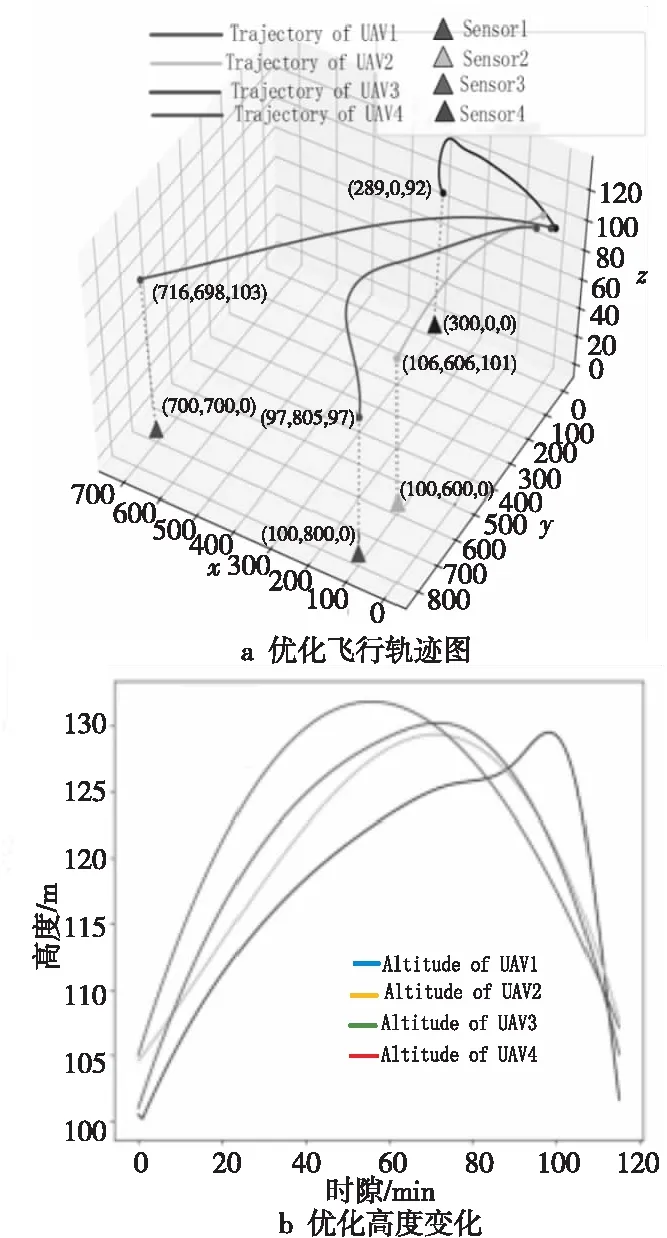
Figure 5 Optimized trajectory of UAV图5 无人机优化轨迹
图6描述了无人机辅助通信过程中单位时隙中下行链路能量收集和上行链路数据传输时,不同的时间分配策略下相应的上行能量收集率和下行数据传输率。时间分配指数M由单位时隙内tbe/tbi表示。在满足数据传输所需最小能量收集条件下,显然,上下行链路时间分配越多则能量收集率与数据传输率分别越高。但是,对于固定的传感器节点数量来说,下行吞吐量将随着能量收集时间的增加而减小。实验结果表明,当M=0.6左右时,上下行链路性能分别达到较高水平。当比值小于这个最优值时,数据传输率较高,但系统总吞吐量会降低;当比值较大时又会引起较大的单元间干扰,当比值大于这个最优值时,收集能量远大于传输过程所需,造成能量浪费,增加了系统总能耗。

Figure 6 Distribution of working time 图6 工作时间分配
图7给出了优化前后系统AoI性能对比。由式(1)~式(12)可以看出,本文所述联合采集点选择、轨迹优化及时间分配的AoI最小化方案最终可以量化为求解式(21)的最优解。由式(11)可知,先到达悬停高度的无人机AoI逐次大于后续到达的无人机AoI,图2可以充分证明这一观点,且图5的仿真结果也验证了该推理的正确性。由图7可得,优化后的模型在整个飞行周期的AoI与最初飞行轨迹的平均AoI相比显著减小,最大AoI仅需4 min,比初始值减小约30%。此外,与初始设置相比,无人机在最大传输速率下获得稳态所需的时间较少,这表明该方案在满足基本通信需求的条件下,有效实现了系统AoI最小化。
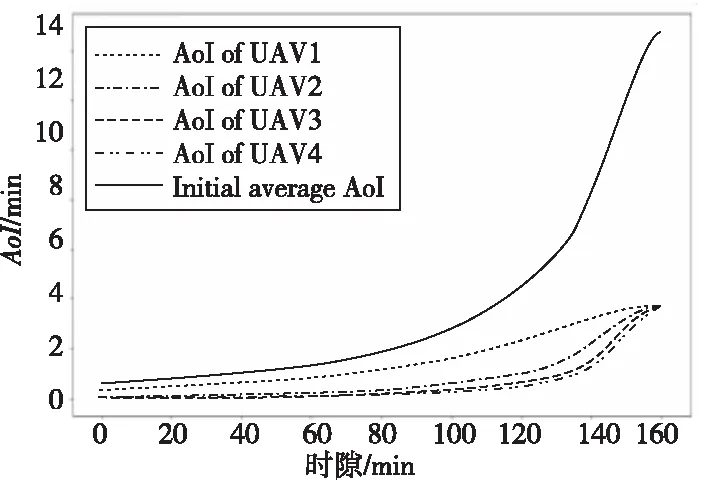
Figure 7 Comparison of AoI before and after optimization图7 优化前后系统AoI对比图
5 结束语
在新兴实时物联网的应用场景下,无人机辅助收集数据的新鲜度会影响信息的价值及系统性能。本文引用AoI的概念,研究了一种AoI最小化的无人机数据收集和轨迹优化问题。从优化悬停工作和飞行时间2个角度出发,建立了一个联合采集点选择、无人机轨迹优化和时间分配的凸优化问题,构建了一个SCA框架对该问题进行求解,以获得数据收集策略和最优飞行轨迹。仿真结果表明,本文提出的方案有效地优化了系统信息年龄,达到了实时系统追求数据新鲜度的目的。随着无线传输网络的发展,无线能量传输问题也成为研究的焦点。下一步将以无线能量传输作为基础,优化数据收集方案,进一步提出更优的AoI改善方案。
