一种航班异常的检测方法
2022-08-10马琳昌韩明明邓钰贤
马琳昌 韩明明 邓钰贤
(昆明长水国际机场有限责任公司 云南昆明 650000)
1 背景
机场的生产运行是一个严密的生产链条,以过站航班为例,从航班落地到起飞,前后需要经过43 个里程碑节点[1],且里程碑之间有严格的因果关系,以协同决策的理念出发,进行严谨的生产任务安排,可以减少生产资源的浪费,也使机场生产结果可预期,同时建立在可预期生产保障环节上的安全、效率目标得以实现。然而在现实生产过程中,航空器的空中航行常常因天气原因,发生返航、备降、盘旋等待等情况,从第一个环节开始就打乱了整套生产链的安排,且此消息常常不能够及时反馈到各参与保障方,那后续生产结果可预期性就会被打破,造成生产资源的浪费。另外,航空器在空中因各种原因所造成飞行异常现象,有可能导致危险产生,机场又无法及时获取该消息,没有充裕的时间进行调度,对应急救援的及时开展造成困难。肖鹏等人[2]指出,2017年全年,航空器偏离空管指令报告次数达600余次,会对航空器和机上人员安全产生威胁,同时张艺严[3]也说明,迅速、准确地识别异常行为,可以及时制止危害行为发生。所以,该研究可以自动识别航空器空中异常,并提醒机场各保障方的方法就变得切实需要。
2 资料与方法
目前地面获得航空器在空中的状态信息主要渠道是雷达监视系统及ADS-B(广播式自动相关监视系统),二者都可获取航空器空中位置、角度、速度、高度等信息[4]。何桂萍[5]通过研究表明,融合雷达监视系统及ADS-B 系统能够实现从航路到机场地面对飞机的全面、连续监视。支旭东[6]研究表明,使用ADS-B系统监视航路飞行可以满足现有的SSR 间隔标准,暨通过ADS-B,获取的空中航空器信息可以信任,因此该文选取了2021 年7~9 月昆明-腾冲航班进行研究,并通过VariFlight ADSB与Flightradar24获取航班飞行数据,通过归纳分类,把航空器整个飞行轨迹分为正常与异常两类,具体情况见图1、图2。
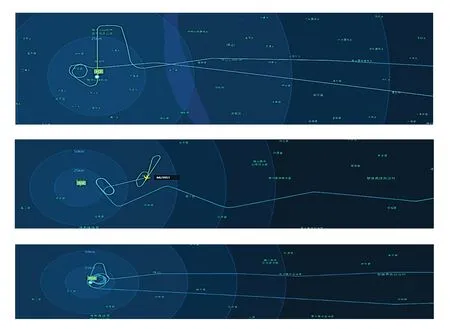
图1 异常航班轨迹
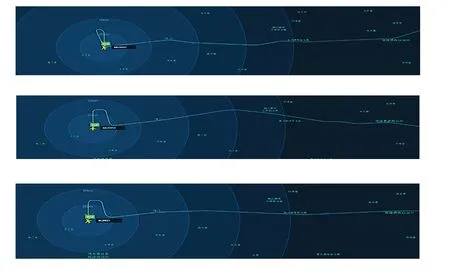
图2 正常航班轨迹
空中航空器回传的数据主要包括角度、速度、高度这3 个信息,该文选取高度资料进行分析。通过观察正常航班高度资料发现,正常航班的高度变化是规律的顺序变化,不同正常航班的变化趋势较一致,又发现实际获得的数据受探测设备本身的精度、设备回传数据的频率、航速(时间)等影响,就会产生偏移点现象,根据图3 显示可知,正常的空中航空器回传的数据变化趋势大致一致,但表现出的数据偏移较大。
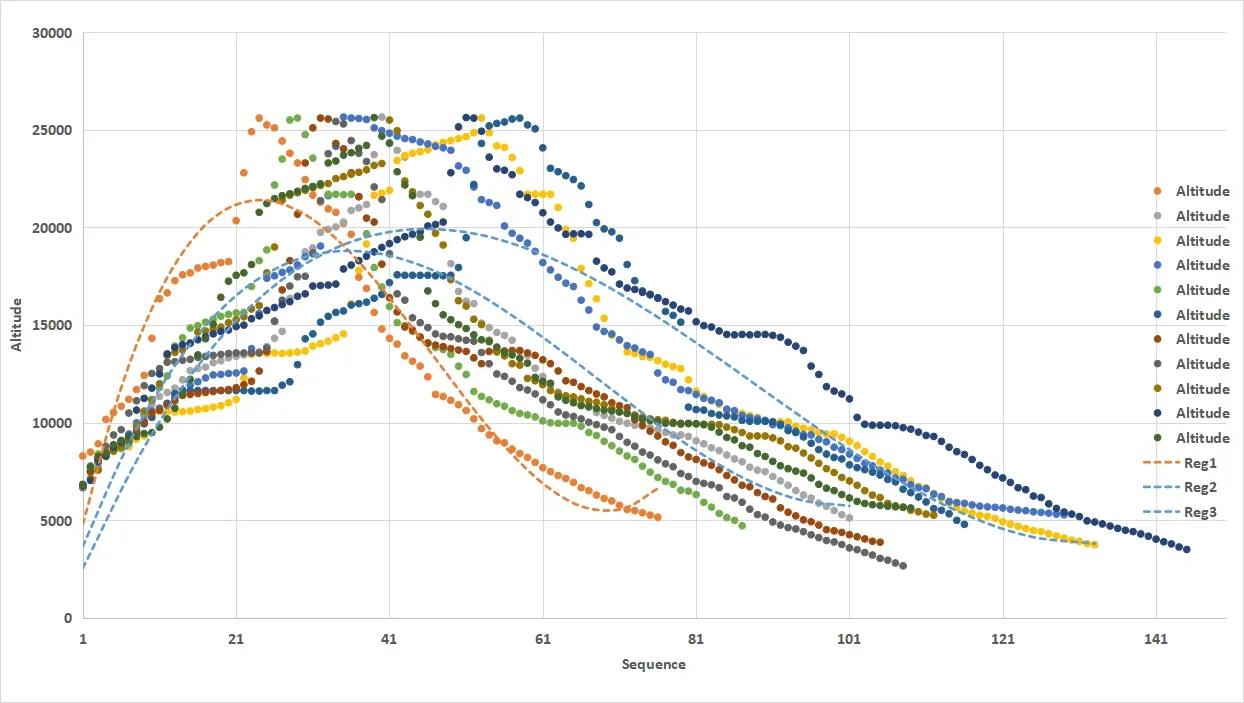
图3 正常航班高度变化
在这里需要对数据进行处理,基本思想是构造高度与精度、频率、速度(时间)的换算,按一定比例转换,合并频率较高的数据,在求均数后,再进行回归分析,得到一个典型的高度变化趋势,构造高度与精度、频率、速度(时间)的换算如下:

通过转换后结果具体见图4。

图4 正常航班高度变化趋势(AVG)
获取正常航班的典型趋势后,对异常航班的高度数据进行同样的处理,并将结果数据和正常航班的高度变化趋势进行对比分析,具体情况见图5。
从图5中可以看出,异常航班的高度变化与正常航班的高度变化趋势有明显的不同,通常会有双峰、多峰等特点,上述即为一个完整分析思路。用同样的方法也可应用于分析飞机的空中方向角、速度信息,总体思路是通过大量历史上正常与异常的航班数据积累,发现正常变化趋势和异常航班的趋势规律,并以此作为基准,判断航班是否是异常航班。在此说明,该文作者所采用的回归分析方法并非最佳回归分析法,这里值得注意的是,可以利用目前主流的人工智能技术[7],找到一种可用于这类分析中更好的分析方法,对此该文不再展开。
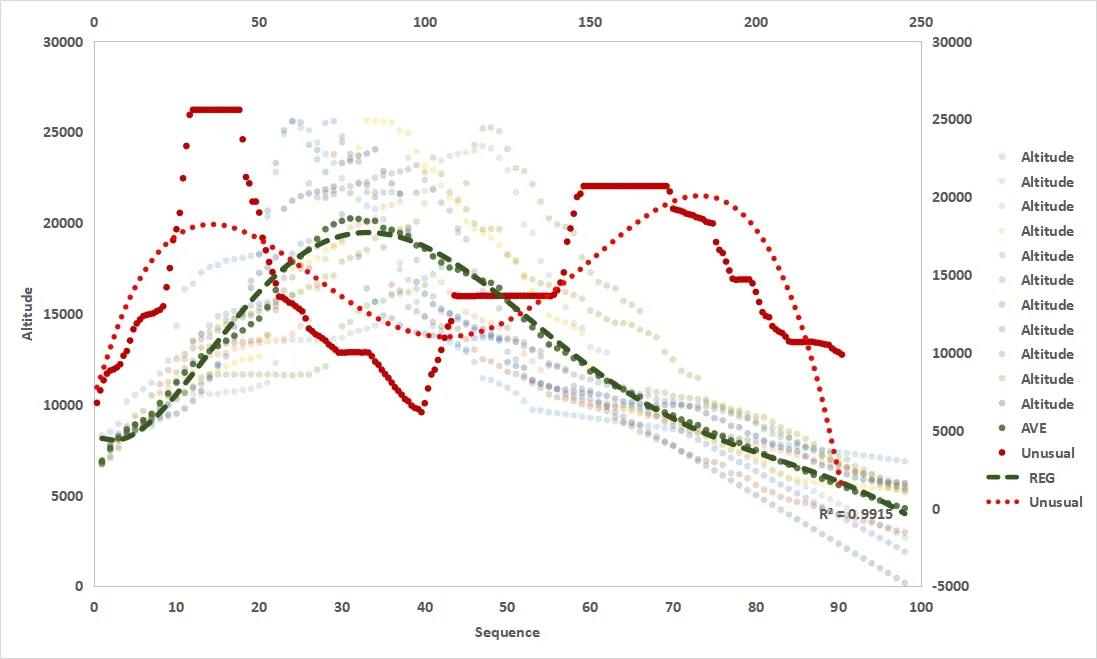
图5 异常航班高度变化趋势对比
然后,介绍对航空器飞行时间的另外一种判断方法,暨对航空器骤降异常进行判断,假定一个检测周期为第一检测周期;最大下降率根据飞机在不同实时飞行高度的不同高度对应;判定式为其中H1与H2分别为第一检测周期内起始时刻和结束时刻所对应的航空器的起始飞行高度和结束飞行高度,T1为第一检测周期,M为最大下降率。根据起飞高度公式,选取相应的最大下降速度。利用第一检测周期开始时刻的数据采集,得到飞机的起始飞行高度H1,以及第一检测周期的末尾飞行高度H2,并利用公式进行计算,计算结果作为判定的参考数据;在异常判定模块中,利用公式进行计算,计算结果作为判定参考数据;在异常判定模块中进行异常飞行判定。此方法同样适用于对角度、速度的处理[8-9]。
3 结语
(1)自动识别航空器空中异常,并提醒机场各保障方,此需求切实需要、可行。(2)利用ADS-B获取航空器空中的高度、角度、速度变化,可以以此判断航空器是否发生异常。(3)判断航班异常,可以运用趋势的办法和周期的方法,结合使用可更好准确地判断航班异常。