18~22岁女性Y平衡测试的下肢表面肌电和姿势稳定性特征
2022-08-08黄兆欣李磊钟嘉敏郭存洋张利强程宗申肖晓飞
黄兆欣,李磊,钟嘉敏,郭存洋,张利强,程宗申,肖晓飞
滨州医学院康复医学院,山东烟台市 264003
0 引言
姿势控制是指身体在任何姿势或活动中保持、达到或恢复平衡状态的能力[1]。机体稳定、有序地运动依赖于下肢姿势稳定性。Y 平衡测试(Y-balance test,YBT)是从星型偏移平衡测试(Star Excursion Balance Test,SEBT)中简化出一种有效的下肢动态平衡测试方法[2]。Hertel 等[3]通过因子分析法发现,SEBT 中前、后内和后外3 个方向上的测试成绩敏感性高于其他5个方向,建议使用前、后内和后外3 个方向的测试代替冗长的8个方向测试。这3个方向代表机体在3个不同平面,额状面、矢状面和水平面的运动能力[4],与肌肉力量[5-6]和神经肌肉控制[7]等相关。该评估方法具有较高的组间(0.99~1.00)和组内(0.85~0.91)信度[8],还具有低成本、易操作、便捷高效等优点,已被广泛用来评估下肢动态稳定性,预测损伤风险[9],检测康复效果,进行临床康复训练[10]。
表面肌电图通过引导、放大、显示和记录皮肤表面神经-肌肉系统活动过程中的生物电信号,说明肌肉的活动与功能间的联系[11]。YBT 每个方向的距离分数能反映神经肌肉控制情况,距离分数越高,神经肌肉控制能力越强[12];伸展距离分数与下肢屈伸膝关节肌肉等速肌力正相关[13]。
神经肌肉控制是神经系统识别传入的关节静态或动态位置和运动信息,调节肌肉激活,改变肌肉募集顺序和运动单位量,以维持关节稳定和协调的过程[14]。已有学者对SEBT 下肢肌电特征进行研究[7,12,15],但仅采用均方根(root mean square,RMS)这一指标。Earl 等[7]对下肢腘绳肌、胫前肌和腓肠肌的研究发现,不同方向上肌肉激活模式不同。对躯干肌、臀肌和大腿肌肉的肌电特征进行研究发现[12,15],躯干肌和臀肌的激活与SEBT 各方向伸展距离分数有关。上述研究对下肢屈伸膝和踝关节肌肉的描述不全面。
本研究增加积分肌电值(integral electromyography,iEMG)和肌肉贡献率指标,探究YBT 时下肢屈伸膝关节(股二头肌、股直肌)和踝关节肌肉(腓肠肌、胫前肌)的肌电特征,探讨YBT 时姿势稳定性,及两者之间的相关性。
1 资料与方法
1.1 一般资料
2021年10月至11月,于滨州医学院共招募18~22岁女性大学生26 例。平均年龄(19.46±0.86)岁,身高(1.62±0.05) m,体质量(59.21±8.92) kg,体质量指数(22.42±2.91)kg/m2,下肢长(81.82±5.24)cm。
纳入标准:①测试前1 个月内无躯干和肢体关节等损伤情况,能正常参加测试;②自愿签署知情同意书。
排除标准:有肌肉骨骼功能异常、神经系统疾病、严重内脏病变、严重代谢性疾病或骨肿瘤。
本研究已经滨州医学院医学伦理委员会科研项目伦理审查(No.2021-233)。
1.2 方法
受试者测试前热身。确定优势腿(优先选择踢球的腿[16])。去除体毛,75%酒精脱脂。采用表面肌电仪(美国NORAXON 公司),采集频率1500 Hz。待皮肤干燥后,将电极片沿肌纤维走向贴于优势腿股直肌、股二头肌、胫前肌和外侧腓肠肌肌腹正中,连接和固定传感器。
手动抗阻方法[17]测试优势腿4 块肌肉最大等长收缩(maximum voluntary contraction,MVC),持续5 s,计算中间3 s RMS 的平均值(RMSMVC)。测试3 次,休息1 min,取均值。
将YBT 运动套件(美国FUNCTIONAL MOVE‐MENT SCREEN)贴置于三维测力平台(美国BERTEC公司)中心位置。测力平台采集频率1000 Hz;YBT 运动套件前侧管与后内侧和后外侧管之间的夹角均为135°,后内侧与后外侧管之间的夹角为90°,三个方向的中间区域为支撑腿站立区[18]。三维测力平台和表面肌电仪使用Vicon 三维运动分析系统的数据转换盒同步器进行同步。
受试者赤足,优势腿支撑站立于贴有YBT运动套件的测力台上,拇趾在中心横线后,对准正前方,双手叉腰;非优势腿按前侧、后外侧和后内侧顺序依次伸展,每个方向伸展3 次后换下一个方向;测量伸展的最大距离,精确到0.5 cm[19]。
正式测试前,受试者每侧腿每个方向尝试6 次,以熟悉测试动作,休息5 min 后进行正式测试;如果受试者尝试6次伸出都失败,则该方向记为0 cm。
测试者伸展时不能用挡板作为前伸腿的支撑点。以下情况认为失败,不纳入数据分析:单腿站立时失去平衡、站立脚发生明显移动、伸展脚落地支撑、伸展腿未回到初始位置。
记录3 个方向的伸展距离原始值及标准值;肌电信号RMS、iEMG 和肌肉贡献率;压力中心(center of pressure,COP)总轨迹长、前后方向(antero-posterior,A/P)和内外侧方向(medio-lateral,M/L)轨迹长。RMS 用RMSMVC标准化:

肌电信号采用Noraxon MR3 软件平滑过滤,整流和带通滤波(10~500 Hz)[20],导出到Excel,数据做时间归一化处理,采用MatLab 2020 软件和Excel 2016软件进行数据计算;COP 数据经时间归一化后采用MatLab 2020软件进行数据处理。
1.3 统计学分析
采用SPSS 22.0 软件处理数据。计量资料符合正态分布,以()表示,采用单因素方差分析、配对样本t检验;不符合正态分布,以M(QL,QU)表示,采用Kruskal-Wallis 检验、Wilcoxon 符号秩和检验。肌电信号特征与姿势稳定性的相关性采用Pearson 相关性分析[13]。显著性水平α=0.05。
2 结果
2.1 RMS
在YBT 3 个方向上,RMS 由大到小排序大致为:股直肌、胫前肌、腓肠肌和股二头肌(P<0.001)。见表1。
股直肌和腓肠肌RMS 在三个方向上无显著性差异(P>0.05),股二头肌RMS 后内侧小于后外侧,胫前肌RMS前侧小于后外侧。见表1。

表1 YBT不同方向各肌肉RMS比较 单位:%
2.2 iEMG
在三个方向上,股二头肌iEMG 最小,胫前肌最大(P<0.001),其他两肌居中。见表2。
股直肌iEMG 3 个方向无显著性差异,股二头肌iEMG 后内侧小于后外侧,胫前肌iEMG 前侧小于后外侧,腓肠肌iEMG 前侧大于后内侧和后外侧。见表2。

表2 YBT不同方向各肌肉iEMG比较 单位:μV·s
2.3 肌肉贡献率
在三个方向上,股二头肌肌肉贡献率最小,胫前肌最大(P<0.001),其他两肌居中。见表3。
股直肌肌肉贡献率3 个方向无显著性差异,股二头肌肌肉贡献率前侧大于后内侧,胫前肌肌肉贡献率前侧小于后外侧,和腓肠肌肌肉贡献率前侧大于后内侧和后外侧。见表3。
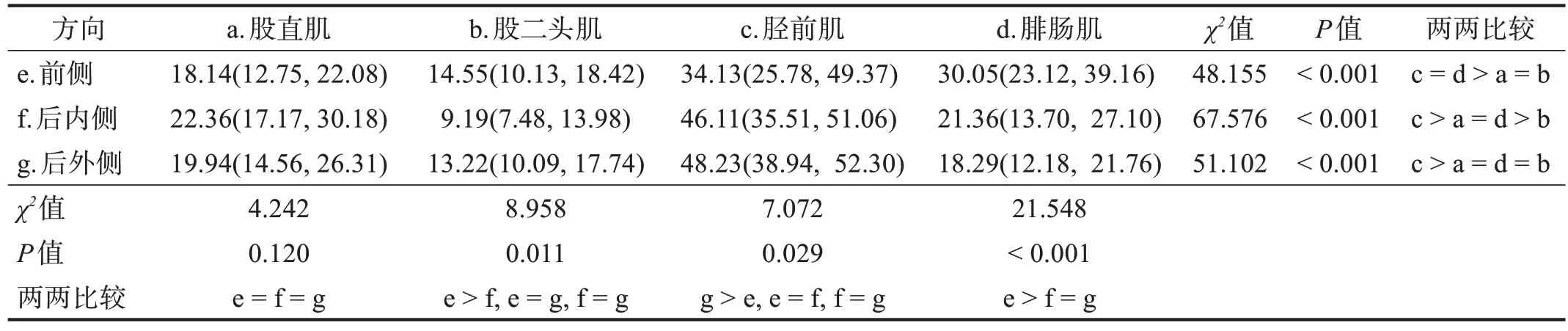
表3 YBT不同方向各肌肉肌肉贡献率比较 单位:%
2.4 姿势稳定性
总体来看,COP 总轨迹长和各方向轨迹长以后外侧最大,前侧最小(P<0.05)。见表4。

表4 YBT伸展距离分数和COP轨迹长度
2.5 肌电特征与姿势稳定性的相关性
前侧时,COP 总轨迹长与股二头肌和腓肠肌iEMG 正相关(P<0.05);后内侧时,COP 总轨迹长与腓肠肌iEMG 正相关(P<0.05);后外侧时,COP 总轨迹长与胫前肌iEMG 正相关(P<0.05);RMS 和肌肉贡献率与COP总轨迹长无相关性(P>0.05)。见表5。

表5 下肢肌肉肌电特征与COP总轨迹长的相关性
3 讨论
本研究显示,YBT 时,股直肌有效放电量最高,胫前肌放电总量和贡献水平最高;后外侧方向,YBT的伸展距离分数和COP轨迹长优于其他两个方向,动态姿势稳定性最好。YBT运动时,部分关节伸肌或屈肌肌力与姿势稳定性存在一定相关性,关节伸肌或屈肌对保持动态姿势稳定性有着重要作用。
Ortega 等[21]发现,COP 轨迹长度与SEBT 伸展距离呈正相关性。在描述动态姿势任务时,COP 指标越大,代表姿势稳定性越好[22-23]。本研究显示,后外侧动态姿势稳定性更好,与Karagiannakis 等[24]的研究结果基本一致。
RMS代表有效放电,反映肌肉活动时运动单位激活数量、参与活动运动单位的类型和同步化程度[25]。本研究发现,股二头肌在3 个方向上肌肉激活、有效放电量均最小,股直肌最大,腓肠肌低于胫前肌,这可能由于踝关节背伸、脚跟着地状态下,腓肠肌通过离心收缩控制胫骨前倾,腓肠肌运动单位激活较小;为维持踝关节稳定,胫前肌激活增加。
Eliassen 等[26]发现,股二头肌在下蹲动作中运动单位激活量小于股直肌。Lee 等[27]证明,自身体重下深蹲动作不足以刺激腘绳肌激活。YBT下蹲达不到深蹲程度,股二头肌有效激活较少。下蹲动作屈肌激活相对较小,主要由股直肌离心收缩控制膝关节屈曲角度和速度,同时对抗重力作用。
iEMG 是指一定时间内肌肉中参与活动的运动单位的放电总量,是评价肌纤维参与量的重要指标。为维持关节稳定和协调,神经肌肉控制系统会改变肌肉的募集顺序和运动单位量[28]。踝背屈时,胫前肌参与活动的运动单位增加,放电总量最大。随着踝关节背屈角度增加,胫前肌由于能量代谢失衡、局部酸性代谢产物增多或肌氧含量下降[29],导致肌纤维收缩力降低,为维持动作进行,神经系统募集新的运动单位开始放电。
肌肉贡献率是指该肌肉在动作周期内的iEMG 占参与该动作所有肌肉iEMG 和的比值,反映该肌肉在完成动作时的重要性[30]。从肌肉贡献率来看,胫前肌和股直肌在YBT运动中占主导地位。在YBT 3个方向中,胫前肌肌肉贡献率均高于其他肌肉,且在后内侧和后外侧大于前侧,腓肠肌的肌肉贡献率前侧大于后内侧和后外侧。当主动肌收缩时,中枢神经系统会控制拮抗肌协调性放松或适当性离心收缩,即神经肌肉控制系统调节胫前肌和腓肠肌协调性地收缩或放松,促进踝关节背伸动作稳定完成[31]。
综合RMS 和iEMG 可知,股直肌在3 个方向上的运动单位激活量、放电总量和贡献率起着相似作用,对保持膝关节稳定起重要作用。股二头肌的肌肉贡献率最小,与股直肌共同维持膝关节稳定性。
本研究发现,部分关节伸肌或屈肌与姿势稳定性存在一定相关性。在前侧时,股二头肌和腓肠肌与姿势稳定性相关;后内侧时,腓肠肌与姿势稳定性相关。Kang等[32]发现,踝关节背伸角度与伸展距离正相关;COP 轨迹长与伸展距离间正相关[21],随着伸展距离增加,踝关节背伸角度增大,COP 轨迹长变长,需要腓肠肌募集更多的运动单位放电。后外侧时,胫前肌与姿势稳定性相关。伸展腿向后侧伸展,支撑腿胫前肌需募集较多运动单位放电,引起踝关节背伸,使得伸展腿伸展更远。唐桥等[13]发现,综合性项目运动员支撑腿膝关节伸肌和屈肌的等速肌力与YBT 3 个方向的伸展分数相关。本研究对象为18~22 岁女性,肌力相对较弱,只发现部分肌肉与姿势稳定性相关。有研究发现[6],中老年人等速肌力与伸展分数普遍不具有相关性。此外,RMS和肌肉贡献率与姿势稳定性间不存在相关性,这可能是由于进行YBT时个体运动速度不一致,各肌肉收缩的角速度、激活程度等存在偏差。
闭链运动是指肢体远端固定而近端肢体活动的运动。闭链运动训练在前交叉韧带重建术后[33]和膝关节半月板损伤[34]等疾病的康复中尤为重要,可以减轻关节剪切力,增强关节周围肌肉神经控制能力等。髌骨疼痛综合征的主要病因是股四头肌失衡[35],YBT 运动不仅是一种典型的下蹲型闭链运动,且股直肌激活较明显,可以作为一种康复训练方法应用于临床。
在SEBT 时,优势腿和非优势腿对伸展距离没有影响[36],所以本研究仅分析优势侧下肢肌肉肌电信号和姿势稳定性。由于进行YBT 时个体运动速度不一致,各肌肉收缩角速度、激活程度等有偏差,后续可通过扩大样本量,探究不同运动速度下肌电信号特征与姿势稳定性间的相关关系。
利益冲突声明:所有作者声明不存在利益冲突。
