基于Simulink仿真的悬垂举腿动作机械能的研究
2022-08-06王秀平
王秀平
(忻州师范学院体育系,山西 忻州 034000)
0 引 言
悬垂举腿动作是由自然悬垂开始,做直腿上举的练习。动作要求伸直膝关节,形成腿部与躯干约成直角(大腿在髋关节处屈),主要是由髂腰肌、股直肌近固定收缩完成[1],如图1 所示。在运动训练及体育教学中,常用悬垂举腿来发展腹部肌群力量[2]。悬垂举腿也是评定运动员身体素质水平的主要指标[3]。对于悬垂举腿的评价方法有计时评价,如60 s 悬垂举腿[4]、30 s 悬垂举腿[5]、20 s 悬垂举腿[6]和10 s 悬垂举腿[7];还有计数评价,如连续连贯完成悬垂举腿动作的数量计分[8]。这两种评分方法只对性别进行区分,没有考虑不同身体形态指标对于评分的影响。由于性别、身高和体质量的差异,完成相同数量的悬垂举腿动作所需的机械能不尽相同。基于此,有必要对不同性别、身高和体质量的参与者做悬垂举腿动作所需的机械能进行对比分析,以便于更好地掌握训练情况,为改进评分方法提供理论依据。
国内外学者对运动动作所需机械能方面有广泛的研究。田径方面,研究铅球、铁饼和标枪等运动在最后加速阶段,各体段之间机械能及功率的变化规律[9];还对竞走过程中运动员的行走速度和机械能的变化进行研究,揭示了有关竞走速度维持的技术因素[10];运用三维动作捕捉技术对撑杆跳高进行能量计算,为技术诊断提供依据[11]。游泳运动方面,对不同蛙泳动作进行运动学参数及能量消耗的对比分析,为蛙泳的训练提供依据[12]。球类运动方面,通过采集高尔夫挥杆摆动动作的三维运动学数据,计算每个刚体和每个阶段的峰值总动能、线性动能和角动能,为指导运动实践提供依据[13]。

图1 悬垂举腿示意图
悬垂举腿的训练和评分方法仍有可以改进的空间,从机械能角度研究各项体育运动动作已经被广大学者认可。所以,有必要从机械能的角度对不同身体形态人群做悬垂举腿动作的差异进行探讨,为改进悬垂举腿的训练及评分提供理论依据。
1 悬垂举腿动作数学模型建立
1.1 建模依据
(1)成年人人体惯性参数。根据《中华人民共和国国家标准GB/T17245—2004》[14]提供的成年人各体段质量、质心位置对体质量和身高的二元回归方程获得参数。
(2)机械能守恒定律的推论。重力以外的力做正功,物体(或系统)的机械能增加,且重力以外的力做多少功,物体(或系统)的机械能就改变多少[15]。
1.2 条件假设
(1)假设在初始和结束位置,足、小腿、大腿三体段的质心及小腿测量起点、大腿测量起点、髂前上棘点在一条直线上且垂直于水平面,如图2 所示。
(2)假设初始位置下肢的速率为0,结束位置下肢的速率为0。
1.3 模型建立
在悬垂举腿动作完成过程中,机械能发生变化的体段是大腿、小腿和足,所以,只对这3 个体段的机械能进行计算。体段质心位置(l)和体段质心上升高度(h)如图2 所示。
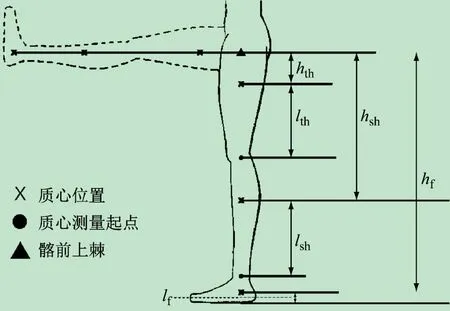
图2 建模示意图
参照《中华人民共和国国家标准GB/T17245—2004》[14],体段质量或体段质心位置为

式中:B0、B1和B2均为二元回归方程的系数,用来计算体段质量和体段质心位置(体段质心位置是从测量起点至体段质心的距离,mm);X1为身体总质量,kg;X2为身高,mm。大腿、小腿和足的质心位置测量起点分别是胫骨点、内踝点和足底(见图2)。
在本研究中,m为体段质量,kg;l为体段质心位置,mm;B′0、B′1、B′2为体段质心位置系数,系数参照《中华人民共和国国家标准GB/T17245—2004》[14]。以下各式中用th、sh和f分别表示大腿、小腿和足。
各体段质量:

各体段质心位置:
各体段质心上升高度:

式中,Lcxth、Lcxsh、Lcxf指体段质心下部尺寸(也就是lth、lsh、lf)占本体段全长的百分比,参数参照《中华人民共和国国家标准GB/ T17245—2004》[14]。
完成悬垂举腿动作人体所需的机械能:

2 Simulink仿真及结果分析
2.1 不同体段所需机械能的仿真子系统
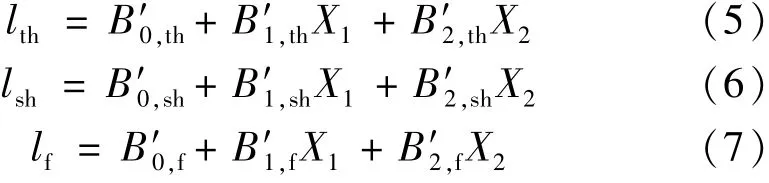
根据式(2)~(10),在Simulink 环境下建模,得到大腿、小腿、足等体段所需机械能仿真子系统,如图3~5 所示。
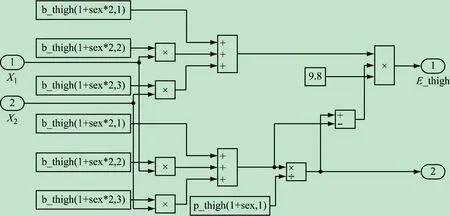
图3 大腿所需机械能仿真子系统

图4 小腿所需机械能仿真子系统
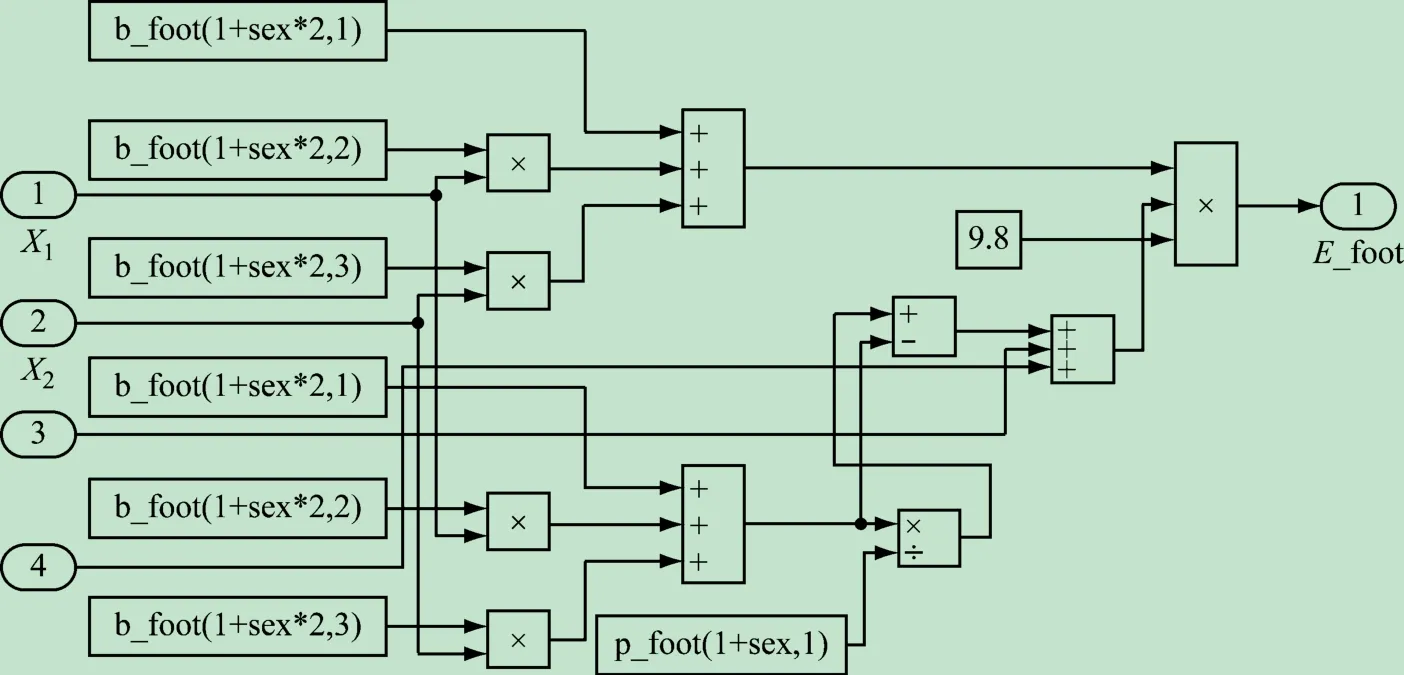
图5 足所需机械能仿真子系统
2.2 悬垂举腿动作所需机械能的仿真总系统
根据式(11),得到3 个体段(大腿、小腿、足)所需机械能的仿真总系统,如图6 所示。
2.3 结果分析
2.3.1 相同性别,不同身高,相同体质量人群所需机械能的比较
(1)不同身高,相同体质量男子所需机械能比较。仿真结果见图7,体质量分别为40、50、60、70、80、90和100 kg 的男子做悬垂举腿时,随着身高的增加,所需的机械能逐渐增加,所需机械能曲线的斜率范围分别是0.46 ~0.53、0.58 ~0.65、0.7 ~0.78、0.83 ~0.9、0.95 ~1.03、1.08 ~1.15 和1.2 ~1.27。
体质量一定的男子做悬垂举腿所需的机械能随着身高的增加而增大。单位身高内,机械能增量随着体质量的增加而增大。

图6 仿真总系统

图7 不同身高、体质量人群机械能比较
(2)不同身高,相同体质量女子所需机械能比较。仿真结果见图7,体质量分别为40、50、60、70、80、90和100 kg 的女子做悬垂举腿时,随着身高的增加,所需的机械能逐渐增加,所需机械能曲线的斜率范围分别是0.59 ~0.91、0.65 ~0.97、0.72 ~1.04、0.78 ~1.1、0.84 ~1.16、0.9 ~1.22 和0.97 ~1.29。
体质量一定的女子做悬垂举腿所需的机械能随着身高的增加而增大。单位身高内,机械能增量随着体质量的增加而增大。
2.3.2 不同性别,相同身高,相同体质量人群所需机械能比较
仿真结果见图7,身高范围在1.4 ~2.2 m,体质量范围在40 ~100 kg,身高、体质量相同情况下,女子做一个悬垂举腿所需的机械能大于男子。
2.3.3 相同性别,相同身高,不同体质量人群所需机械能比较
(1)相同身高,不同体质量男子所需机械能比较。仿真结果见图8,身高分别为1.4、1.6、1.8、2.0 和2.2 m的男子在做悬垂举腿时,随着体质量的增加,所需的机械能逐渐增加,所需机械能的曲线斜率范围分别为0.97 ~1.09、1.21 ~1.34、1.46 ~1.58、1.71 ~1.83 和1.96 ~2.08。
因此,身高一定的男子做悬垂举腿所需的机械能随着体质量的增加而增大。单位体质量内,机械能增量随着身高的增加而增大。
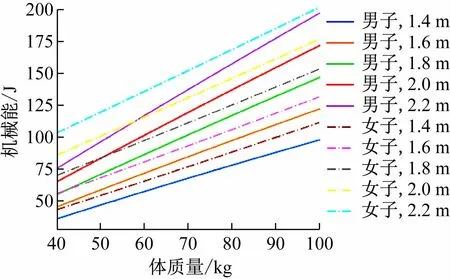
图8 不同体质量、身高人群机械能比较
(2)相同身高,不同体质量女子所需机械能比较。根据仿真结果(见图8),身高分别为1.4、1.6、1.8、2.0和2.2 m的女子在做悬垂举腿时,随着体质量的增加,所需的机械能逐渐增加,所需机械能的曲线斜率范围分别为1.1 ~1.17、1.23 ~1.29、1.35 ~1.42、1.48 ~1.54 和1.6 ~1.66。
身高一定的女子做悬垂举腿所需的机械能随着体质量的增加而增大。单位体质量内,机械能增量随着身高的增加而增大。
3 结 语
本研究基于成年人人体惯性参数和机械能守恒定律,在一系列假设条件下,采用Simulink对悬垂举腿动作所需机械能进行仿真,并对仿真结果进行可视化分析。发现:(1)体质量或者身高一定时,做悬垂举腿所需的机械能随着身高或者体质量的增加而增大。单位身高或者体质量内,机械能增量随着体质量或者身高的增加而增大。(2)相同身高和体质量的女子做悬垂举腿所需的机械能大于男子。
