车载式大田土壤电导率在线检测系统设计与试验
2022-08-05胡丽娜翟长远张焱龙窦汉杰
梁 栋 胡丽娜,2 王 秀 翟长远 张焱龙 窦汉杰
(1.安徽大学电子信息工程学院,合肥 230039;2.北京市农林科学院智能装备技术研究中心,北京 100097;3.国家农业智能装备工程技术研究中心,北京 100097)
0 引言
近年来,为提高粮食产量,化肥农药的过度施用严重破坏土壤结构,造成土壤板结、耕地土壤退化、保水肥能力下降等情况,不仅影响作物生长,还与粮食食品安全息息相关,如何快速有效地获取土壤相关参数实现智能化田间管理是实现精细农业的重要基础[1-3]。土壤中包含众多影响作物生长的因素[4-6],逐个测量各成分耗时耗力成本高,故需要一项能够综合反映土壤中各成分的相对指标,在物理学的研究内容中,土壤电导率可反映土壤品质和物理特性的丰富信息[7-9],如土壤含盐量、含水率、有机质含量、质地结构[10]、孔隙率[11-12]和肥量等都与电导率呈相应的变化关系[13-15]。
土壤电导率的测量可分为实验室测量和基于传感器的在线测量。实验室测量土壤电导率操作过程较为复杂,且实时性差,但此方法的检测精度较高,可用于实时传感器标定。基于传感器检测电导率可分为接触式和非接触式两种。非接触式主要是电磁感应法[16],此方法易受外界电磁信号及环境因素干扰。接触式主要是电流-电压四端法[17-19],采用的电极传感器可充分接触土壤高效实时检测且基本不破坏土壤结构。大田环境复杂,土壤电导率的检测值往往受土壤中多种因素的影响。孙宇瑞[15]研究表明,土壤含水率为15%~30%时土壤电导率与含水率呈线性关系,小于15%或大于30%时,电导率不随含水率变化而变化;相比之下,土壤含盐量对电导率的影响程度远大于含水率。赵燕东等[20]通过对比交、直流四端法对电导率测量的影响,发现使用直流信号源检测土壤电导率时,检测值会逐渐变为零,不适用于检测土壤电导率,其设计的探针式传感器在不同插入深度下检测值不同。盛文溢等[14]采用自行设计的土壤含水率、电导率与耕作阻力测量系统在特定的施肥管理试验田进行了多参数相关关系研究,建立了农田电导率与土壤含水率、耕作阻力以及施肥量的线性统计预测模型。杨玮等[21]采用信号发生器和数字示波器改进检测电路,提高了系统检测精度,通过开展田间和实验室试验,分析系统数据拟合R2不高原因可能是由拖拉机抖动造成。近些年,研究人员对检测方法不断探究,改进检测电路,研制便携式电导率检测仪以及车载检测系统[22-24],试验多在实验室环境下开展,分析土壤含水率、温度、孔隙率及传感器插入深度等对电导率检测的影响。
本文基于电流-电压四端法原理,设计大田车载式土壤电导率在线检测系统,通过试验对自制装置检测性能进行测试,并探究拖拉机振动、传感器插入深度、作业速度和土壤坚实度对系统电导率检测精度的影响,以期为开展基于土壤电导率的变量施肥控制技术研究提供技术支撑。
1 系统整体设计
1.1 电流-电压四端法测量原理
电流-电压四端法是最常用的接触式土壤电导率检测方法,其原理如图1所示。

图1 四端法原理图Fig.1 Schematic of four-terminal method
检测电路主要有2部分:一是J、K两端的交流恒流源给大地电阻提供的电流信号;二是M、N两端检测的电压信号,对于长度和面积都不能确定的大地,测量其电导率,孙宇瑞等[25]推导了传感器电极在不同排布情况下的计算公式为
(1)
式中σ——土壤电导率,S/m
dJM、dJN、dKM、dKN——电极间距,m
I——恒流源输出电流,A
VMN——M、N之间电压,V
本文传感器电极采用Wenner排列方式,电极间距相等都设为d,故式(1)可简化为
(2)
本系统传感器电极圆盘直径38 cm,每2个圆盘电极间距为22 cm,根据传感电极间距、恒流源输出I和M、N两端检测的电压信号即可计算出此区域的电导率。
1.2 系统设计
车载式土壤电导率在线检测装置包括电导率在线检测系统和电导率传感器。本文主要设计了车载式土壤电导率在线检测系统,电导率传感器采用美国Veris公司生产的Veris3100型电导率传感器,其结构组成如图2所示。主要由圆盘限深轮、圆盘电极总成、绝缘隔离垫、电极缓冲装置、电极圆盘和圆盘轴承组组成,电极圆盘通过机架连接在一起,之间用绝缘隔离垫连接,电极缓冲装置可使电极在遇坚硬物体时缓冲抬起,电极圆盘总成与机架限深轮用于控制电极插入深度,圆盘轴承组保证电极圆盘稳定转动不摆动,限深轮之间,两外侧圆盘电极连接恒流信号源并插入大地土壤,两内侧圆盘电极检测大地电压。
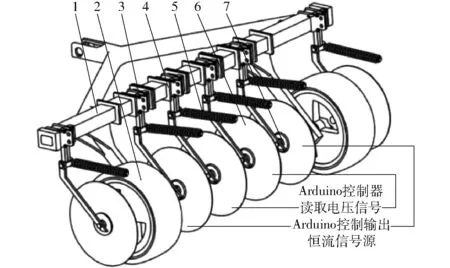
图2 车载电导率检测传感器结构图Fig.2 Structure composition of vehicle-mounted conductivity detection sensor1.机架 2.圆盘限深轮 3.圆盘电极总成 4.绝缘隔离垫 5.电极缓冲装置 6.电极圆盘 7.圆盘轴承组
车载式土壤电导率在线检测系统包括硬件电路和软件系统。工作时,硬件电路产生恒流信号源,信号源加载到电极圆盘上进而与大地之间形成回路,通过实时检测内外圆盘电极之间电压变化,并通过信号放大后由软件系统处理实现土壤电导率计算。
1.2.1硬件电路设计
硬件电路包括恒流源电路、信号处理电路和主控电路,如图3所示。主控电路中Arduino控制器控制高精度信号产生电路、数控增益放大电路和恒流源V-I转换电路输出恒流信号,连接至传感器外侧两电极,内侧两电极检测电压信号至信号处理电路进行处理。信号处理电路包括差分放大电路、有效值转换电路、A/D转换电路,用于将检测到的电压信号差分放大,提高信号精度,并将交流电压信号转换成直流信号。最后主控电路控制器读取并处理电压信号和GPS定位信息,显示及保存。

图3 车载式大田土壤电导率快速检测系统原理图Fig.3 Schematic of vehicle-mounted field soil conductivity rapid detection system
(1)恒流信号源电路
恒流信号源电路由信号发生电路、数控增益放大电路和V-I转换电路3部分组成。
系统信号发生电路采用高精度DDS芯片AD9833数字可编程波形产生器件,AD9833采用3线SPI串口编程控制,具有占用资源少、功耗低及精度高等优点。信号发生电路整体设计电路如图4所示。输出端加上由OP497构成的电压跟随器,可增大AD9833产生信号的驱动能力及抗干扰能力,提高稳定性。
AD9833产生频率可调、幅值不可调的信号,故需经过增益放大电路,使其幅值可调。数控增益放大电路[26]主要有两部分:一部分是经过高精度D/A芯片产生模拟电压量,另一部分是压控增益放大电路将模拟电压量转换成相应的增益放大,如图5所示,D/A转换芯片选用12位高速转换芯片TLV5618。MC1403是高精度、低噪声、低温漂的集成基准电压源,可为TLV5618提供基准电压2.5 V。压控增益芯片选用VCA821,VCA821具有宽频带、V/V线性、持续可变增益等特性。电路增益计算公式为

图4 信号发生电路Fig.4 Signal generation circuit

(3)
式中R5、R7、R8——电阻器R5、R7、R8的电阻
VG——D/A转换电路输出电压
VOUTC——高精度信号源输出电压
VOUT——压控增益放大电路输出电压

图5 数控增益放大电路Fig.5 Numerical control gain amplifier circuit
由于R5和R7相等,公式可化简为
(4)

图6 V-I转换电路Fig.6 V-I conversion circuit
数控增益电路后端连接由高精度、低温漂运算放大器OP27构成的增益微调电路,可把压控增益电路的增益微调至所需比例。获得稳定频率、幅值可调的交流电压信号后,经过恒流源V-I转换电路输出电流信号,如图6所示。选用INA333和运算放大器OP07组成V-I转换电路,根据电路虚短虚断原理可知,输出电流与负载电阻无关,与电路中电阻器RG电阻RG及输入电压有关,其输出电流计算公式为
(5)

(6)
式中G——放大倍数
结合式(5)、(6)可知,输出电流可通过设置输入电压和电阻RG确定,设计选取RG为10 kΩ,则计算电路输出最大电流为1 500 μA,输出电流端加上精密电阻将其两端电压反馈至控制器可实现实时调节恒流输出[27-28]。
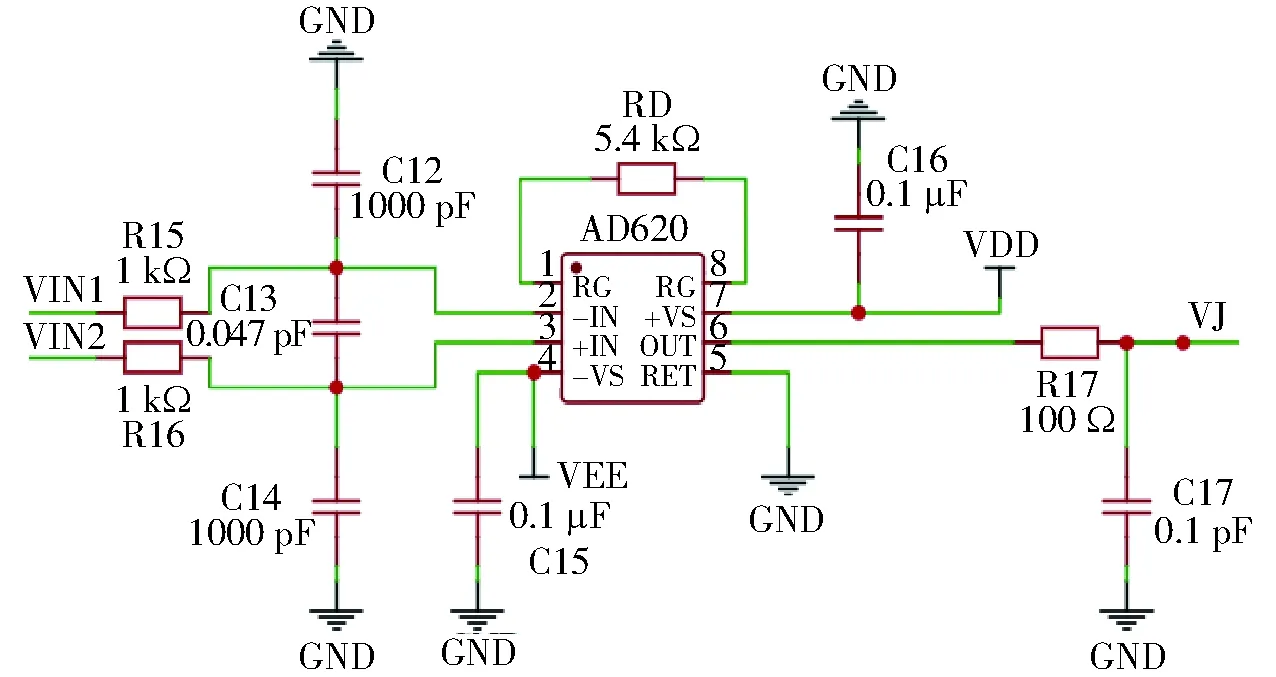
图7 差分放大电路Fig.7 Differential amplifier circuit
(2)信号处理电路
信号处理电路模块包括差分放大和有效值转换电路。为减小误差、提高精度,需要先将两端电压信号经过差分放大处理。如图7所示,放大电路使用低成本、高精度的集成芯片AD620。电路采用±5 V电源供电,由12 V电源转换至5 V后再转换为-5 V,芯片的ref端为输出电压基准端,将其接地定义零输出电压可实现最大1.0 nA的低输入偏置电流。电压信号输入输出端口加上低通滤波电路以滤除高频杂波信号,根据AD620的特性可知该放大电路的放大倍数G由电阻器RD的电阻RD确定,计算式为
(7)
在本设计中,RD取5.4 kΩ,则实际放大倍数为10.2倍。
选用AD637及外围电容、电阻设计有效值转换电路,如图8所示,先将交流电压信号转换成便于读取的直流电压信号;然后采用16位模数转换芯片ADS1115,将模拟直流电压转换成数字信号,输出到单片机,通过IIC通信读取电压信号,根据输入电流和检测电压代入式(2)即可计算出电导率。

图8 有效值转换电路Fig.8 RMS conversion circuit
(3)主控电路
主控电路主要由Arduino UNO控制器、GPS定位和显示存储3部分组成,控制器采用3线SPI串口编程控制高精度DDS芯片AD9833输出电压信号以及可编程控制数控增益放大电路增益值,进而控制输出恒流信号源;GPS定位传感器选用U-BLOX NEO-7N GPS模组,根据串口通讯协议即可与控制器通信,定位成功后根据NMEA-0183协议设置每秒传回一次检测点的数据,控制器再进行解析处理出需要的经纬度信息。获取电导率和GPS定位信息后即可传输至由C#编程的上位机界面进行显示,完成作业后信息可保存至SD卡中。
1.2.2软件系统设计
软件系统工作流程如图9所示,控制器上电后,LED指示灯亮起且系统定时器开始计时,恒流信号源与电导率传感器形成回路,通过检测传感器两端的电压,经过信号处理电路后传给控制器,控制器处理电压信息,计算电导率,判断电导率没有异常后,获取GPS信息判断是否完整,无异常后解析获取经纬度坐标信息,到达定时时间后对应显示并保存。

图9 系统数据采集流程图Fig.9 System data acquisition flow chart
2 试验与结果分析
2.1 实验室试验
2.1.1交流恒流源稳定性试验
对于设计的恒流源,关键技术是在不同负载电阻情况下保持恒定输出,本文设计的恒流信号源电路可通过数控增益放大电路及电阻器RG调节输出电流,理论输出电流范围为0~1 500 μA,四端法测量土壤电导率时,大地电阻一般小于10 kΩ,因此设置交流恒流源的电流为1 000 μA,为检验本文设计设备的稳定性,采用可调电阻模拟不同的大地电阻,测试方法为逐渐增加负载电阻并测量传感器输出,同时使用示波器观察交流恒流源输出正弦波波形,直到达到失真临界点,记录试验数据如表1所示。
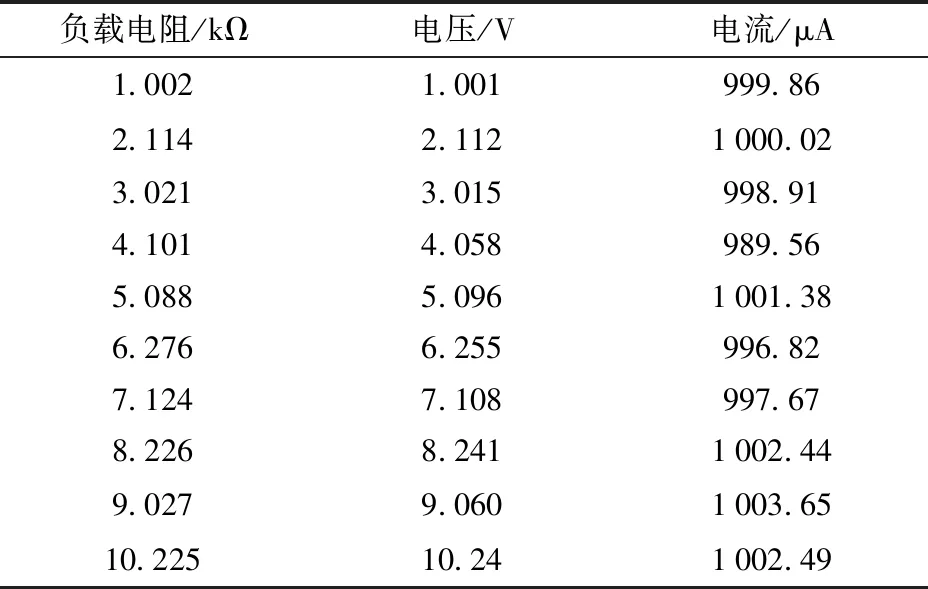
表1 交流恒流源稳定性Tab.1 AC constant current source stability
由表1可知,当电阻逐渐增大时,电流输出基本保持稳定,具有较好的稳定性,最大变化误差为1.04%,电流源负载临界阻值为11 kΩ,满足土壤电导率检测要求。
2.1.2系统响应性能试验
将传感器从一种介质的稳定状态到另一种介质的稳定状态的响应时间作为动态性能指标,用于评价检测系统响应性能。为评价本文设计系统的动态性能,将电导率传感器通电后,从空气状态插入含水率为12%的土壤中,测量系统响应时间,如图10所示。

图10 系统响应性能Fig.10 System response performance
由图10可知,系统响应时间约为540 ms,响应时间相对较快。在基于土壤电导率进行变量施肥作业时,作业网格区域划分一般不低于2 m,作业速度保持在1.5 m/s左右,本文设计电导率检测系统响应时间能确保在作业区域内采集至少2个点,满足应用要求。
2.1.3温漂影响试验
导致温漂现象的原因是多方面的,比如使用环境的温湿度变化、开机预热、传感器及电性元件对温度的敏感程度等,为确定开机预热是否引起检测结果误差,首先制备3个土壤样本,室内恒温25℃,在每个样本内使用本文设计系统从开机开始检测,每30 s读取一次数据,记录10 min内的电导率检测值变化,如图11所示。

图11 温漂试验数据Fig.11 Temperature drift test data
由图11可知,3个样本电导率检测值的最大误差分别为5、6、7 μS/cm,相对误差精度为3.70%、3.45%、3.35%,偏差较小,说明系统开机预热对电导率检测值影响较小。
2.1.4含水率、温度、插入深度影响试验
研究团队前期已开展相关研究[29],针对设计的系统开展了实验室试验,通过中心组合试验探究了土壤含水率、电极入土深度、土壤温度对系统电导率检测值影响规律并建立了土壤电导率计算回归模型
B=(Y-43 895.54+2 201.48A+284.04C+
333.45D-12.59AC-10.85AD-20.8A2+1.86C2-
1.22D2)/(0.42A+0.031C-11.21)
(8)
式中Y——传感器检测值,mV
A——土壤含水率,%
B——土壤电导率,μS/cm
C——电极入土深度,mm
D——土壤温度,℃
模型R2为0.998 3,预测R2为0.996 1,通过对试验中各个因素以及各因素交互项的显著性进行拟合和分析,可知,土壤含水率、电极入土深度、土壤温度对系统电导率检测值有显著影响。本文在该研究基础上,对设计的土壤电导率在线检测系统进行优化,并基于该模型对电导率检测值进行修正。
2.1.5系统标定试验
为提高系统使用时检测精度,需对系统进行标定。首先制备土壤浸提液,土壤样本取自北京市昌平区小汤山国家精准农业研究示范基地。实验室土壤浸提液的制备按照国家环境保护标准HJ 802—2016[30]步骤制备,主要操作流程如图12所示。首先将土壤样品进行风干,然后取风干后的土壤样品和无离子蒸馏水,按照1∶5的比例混合充分搅拌振荡、静止沉淀、经定性滤纸过滤取上层清液,保存待测。试验过程中,室内恒温25℃,试验选取土壤样本3 kg放置于土样盒中,分别配置0%、0.04%、0.08%、0.12%、0.16%、0.20%、0.24%、0.28%、0.32%、0.36%10个含盐量梯度的土壤样本,试验用品包括100 mL烧杯、KCl试剂(国药集团化学试剂有限公司)、无离子水(红荒之力牌,电导率小于0.1 μS/cm)和电子天平(BS323D型,赛多利斯公司,最大量程320 g,精度0.001 g)。电子天平分别称取需要的KCl后溶于100 mL无离子水中,使用喷壶喷洒至土壤样本中搅拌均匀静置,分别用本文设计系统和DDB-307A型便携式电导率检测仪(上海仪电科学仪器有限公司,量程0~100 mS/cm,精度±1.0%FS)检测土壤溶液,试验结果显示当含盐量大于0.3%时四端法检测值基本不变,这也与陈玲等[31]研究结论相符。本文设计系统检测的电导率和DDB-307A电导率仪检测的电导率呈明显线性关系,如图13所示,线性拟合决定系数R2为0.996 6,表明此电导率检测系统检测准确性较高。

图12 土壤浸提液制备流程图Fig.12 Soil extract preparation flow chart
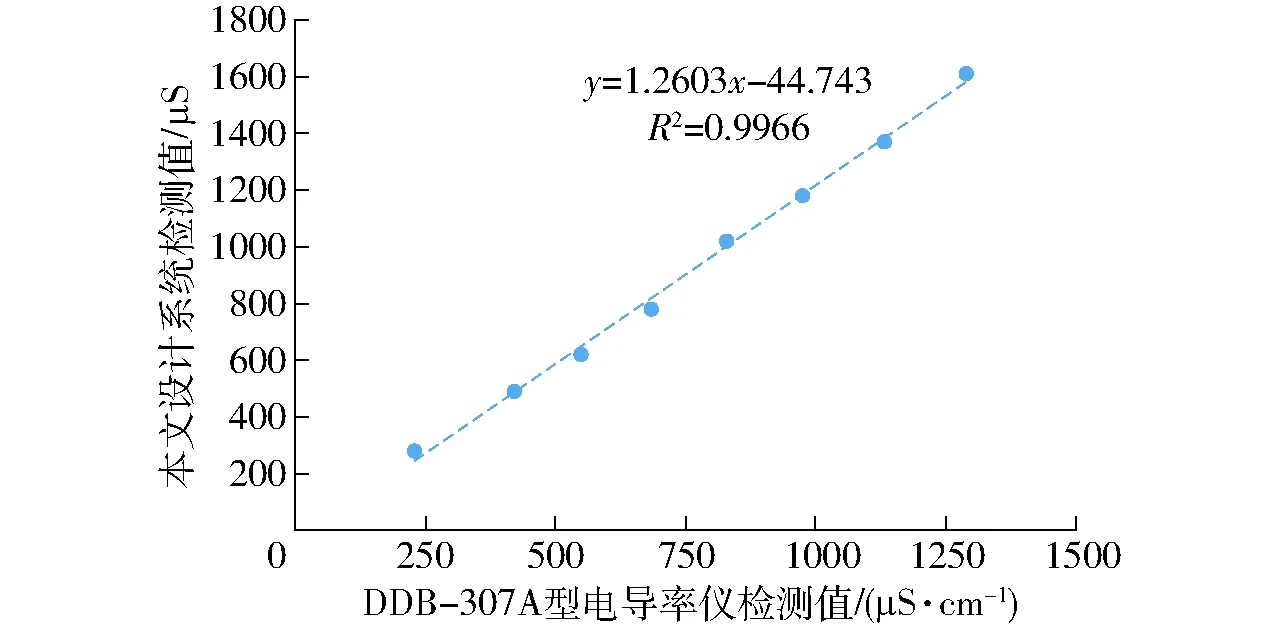
图13 系统传感器标定Fig.13 System sensor calibration
2.2 大田试验
2.2.1系统检测精度试验
将本文设计系统和电导率传感器搭载在拖拉机上,在北京市昌平区小汤山国家精准农业研究示范基地进行了田间试验,为保证含水率不影响检测,试验前采集土样进行检测,土壤含水率小于15%。
试验时间为9月1日08:00—18:00,温度19~29℃,天气晴转多云。试验地附近无建筑物遮挡,GPS信号可准确接收,首先对系统的检测精度进行测试,田间试验如图14所示。在25 m×120 m区域内选取90个测量点,每个检测点先使用本文设计系统检测电导率并保存数据,再在圆盘放置位置采用五点法进行土壤样本采集,采集深度在10~20 cm之间,同时,用TR-6D型电导率检测仪检测采样位置处电导率,记录数据,土样采集及TR-6D型电导率仪检测如图15所示。

图14 田间试验Fig.14 Field experiment1.电源 2.拖拉机 3.传感器电极 4.GPS 5.控制系统

图15 土样采集及手持TR-6D型电导率仪检测Fig.15 Soil sample collection and handheld TR-6D detection
对本文设计系统、TR-6D型电导率仪和DDB-307A型检测仪在90个检测点检测的电导率数据进行分析,不同检测方式下电导率分布如图16所示。可知,3种检测方式下土壤电导率整体变化趋势相似,但同一检测点三者检测值存在偏差。

图16 性能对比数据Fig.16 Performance comparison data
为了进一步分析3种检测方式之间的差异,在原有检测数据基础上剔除异常数据,默认实验室电导率测量值为实际土壤电导率[21],分别将本文设计系统检测电导率、TR-6D型电导率仪检测电导率与DDB-307A型检测仪检测电导率进行相关性分析,如图17所示。可知,本文设计的电导率检测系统检测数据的R2为0.734 2,而TR-6D型电导率仪检测数据的R2为0.609 5。本文设计的车载式大田土壤电导率在线检测系统电导率检测精度相对较高。同时,大田试验检测时天气温度为19~29℃,土壤检测点多、时间跨度大,环境温度变化会影响本系统电导率检测精度。前期试验结果以及文献[20]和文献[32]研究表明,温度与电导率呈线性关系,同一个样本在相差5℃的条件下检测的电导率差值约40 μS/cm。因此,在考虑温差影响基础上对试验数据进行分段分析。由于本次实验室检测是在25℃条件下进行,将图17a中采样数据按25℃分为两部分,分别与DDB-307A型检测电导率值进行相关性分析,如图18所示。可知,通过数据分段以后,两部分数据的R2均增加,25℃以上部分电导率数据的R2为0.864 5,25℃以下部分电导率数据R2为0.915 6。该车载式土壤电导率检测系统检测精度进一步提高,大于TR-6D型电导率仪检测精度,可用于大田电导率在线检测。在使用该系统进行电导率检测时,为确保系统检测精度,应考虑温度影响。

图17 不同检测方法电导率检测值相关性对比Fig.17 Correlation comparison of conductivity values for different detection methods

图18 不同环境温度下电导率检测值相关性对比Fig.18 Correlation comparison of conductivity values for different ambient temperature
2.2.2系统稳定性试验
试验区域选取25 m×120 m的旋耕地,随机选择6个点,检测时传感器呈自然插入状态,插入深度为10 cm,每点检测50组数据。检测结果如图19所示,检测点电导率基本保持稳定,对每个检测点的误差进行分析,见表2。该系统最大偏差27 μS/cm,最大相对误差4.47%,满足使用精度要求。
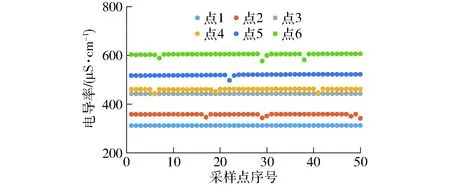
图19 系统稳定性试验结果Fig.19 System sensor stability test results

表2 系统稳定性检测误差Tab.2 System stability detection error

图22 不同插入深度电导率检测值空间分布Fig.22 Spatial distributions of measured conductivity values at different insertion depths
由于拖拉机启动会带动检测系统和传感器振动,为探究振动对系统稳定性影响程度,在25 m×120 m区域内均匀标记90个测量点;每个测量点分别检测拖拉机静止和启动状态下的电导率数据并保存。将获取的电导率数据进行处理,如图20所示,对比拖拉机启动振动和熄火静止状态的电导率数据,两者发生明显变化,说明拖拉机振动对测量结果具有显著影响,相对静止状态电导率检测值的相对误差范围为-9.39%~10.37%。为进一步明晰误差产生原因,对单点连续检测数据进行分析,发现电导率检测数据呈周期性变化,由此推导误差产生原因主要有:①拖拉机自身振动带动传感器振动导致传感器与地面土壤接触面积不充分。②拖拉机振动周期是采样周期的倍数,当振动时刻与采样时刻一致时,会抵消或叠加部分电导率检测信号,导致电导率的变动是呈现周期性变化。表3对误差绝对值在一定范围内占比进行统计,可知误差主要集中在0~10 μS/cm内。
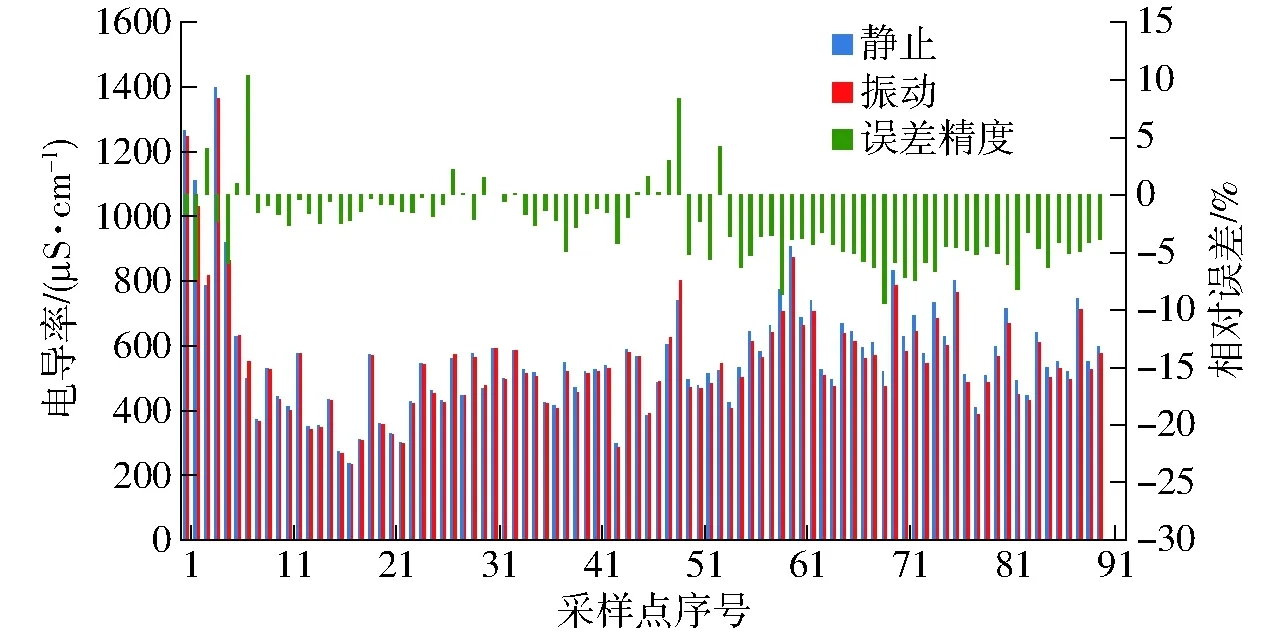
图20 拖拉机振动和静止状态下电导率检测值变化曲线Fig.20 Change of conductivity detection value under vibration and static state of tractor

表3 振动误差范围占比统计Tab.3 Statistics of proportion of vibration error range
2.2.3电极不同插入深度对比试验
在同一地块不同区域随机选择5个检测位置进行试验,试验前将电极圆盘的半径标记12个刻度,间隔1 cm,检测12组数据,每次记录传感器输出值,依次检测5个测量位置在不同插入深度下的电导率,试验结果如图21所示。当传感器的插入深度在0~10 cm范围内,随着深度增加传感器检测电导率逐渐增大,当传感器插入深度大于10 cm时,传感器的输出基本保持不变,电导率检测较为稳定。
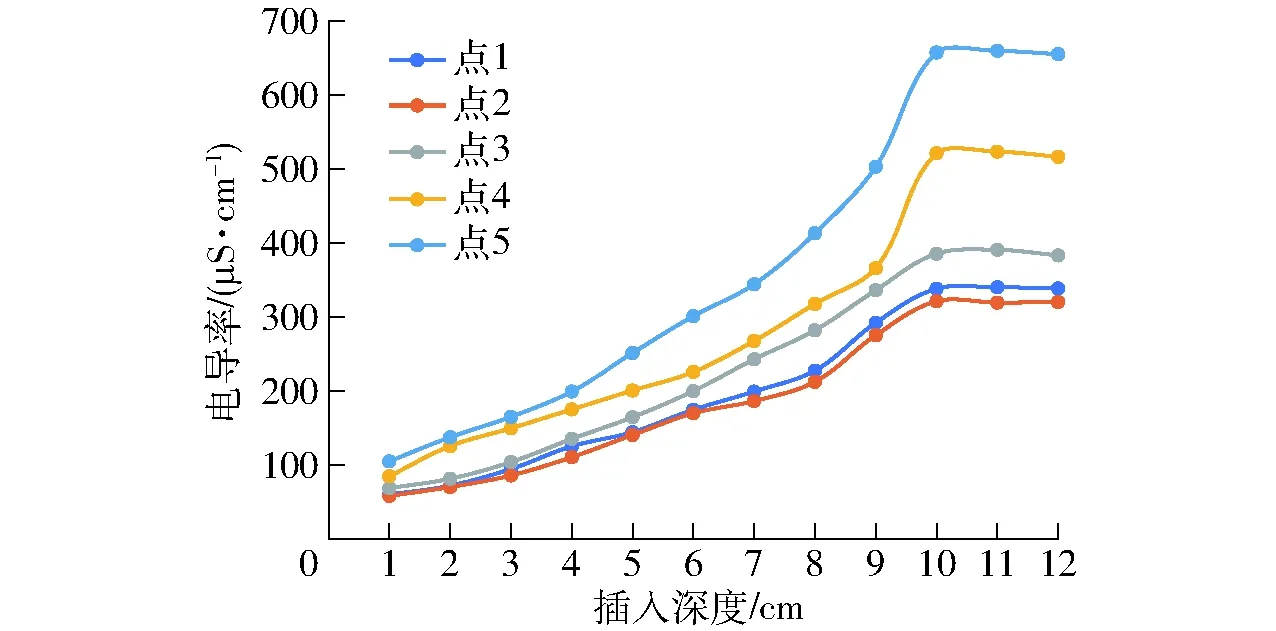
图21 插入深度数据分析Fig.21 Insert depth data analysis
为探究车载系统在行走检测时,不同插入深度对电导率检测影响,选取25 m×120 m田块,将电导率检测传感器圆盘插入深度分别设置为6、8、10 cm,驾驶拖拉机以作业速度3.0 km/h沿相同作业轨迹进行试验,每种插入深度下重复进行3次试验,并将检测数据保存至SD卡中。试验结束后,将采样数据导出,处理后导入ArcGIS中,采用克里金插值法处理,形成区域电导率变化趋势图,如图22所示。从图22可以看出,此区域的电导率随着插入深度的加大逐渐增加,与单点测试插入深度影响变化趋势一致,传感器插入深度为6 cm时,检测区域内电导率整体偏小,且存在电导率陡变现象;随着插入深度增加,8 cm和10 cm区域电导率变化渐变分层且无明显跳变现象,并且插入10 cm时,电导率检测值分布相对均匀,较为稳定。综上,在使用本文设计系统进行电导率测量时,插入深度应大于10 cm。考虑到传感器电极圆盘尺寸和土壤阻力影响,传感器插入深度最好选择10 cm。
2.2.4不同作业速度对比试验
在大田试验过程中,车速是试验数据采集准确性的重要影响因素。为分析车速对系统检测精度影响,将传感器插入深度设置为10 cm,分别驾驶拖拉机以作业速度3.0、4.2、5.0、5.8、6.9 km/h在同一作业区域内进行试验,获取不同作业速度下系统检测的电导率数据。数据处理同样采用克里金插值法,各车速下检测的电导率如图23所示。由试验结果可知,电导率整体变化趋势一致,呈现东部地块比西部地块高的趋势;随着车速增加,西部地块电导率较小的区域逐渐变大,东部地块电导率相对较大的区域逐渐变小,且整体的电导率都明显变小,可能由于车速加快导致传感器与地面接触不充分,进而导致检测值偏小。因此,车速越小,系统检测稳定性越好,进而检测精度越高。

图23 不同车速下电导率检测值空间分布Fig.23 Spatial distributions of measured conductivity values at different speeds
为确定本系统适用的检测车速范围,基于试验过程记录的GPS定位信息,在同一作业轨迹内随机选取5个测量点,选择速度3.0 km/h下检测数据为基准,对比不同车速下的电导率变化,如表4所示。由试验数据可知,测量点1在车速6.9 km/h时的最大偏差为11.50 μS/cm,测量点2在车速5.8 km/h的最大偏差为58.65 μS/cm,测量点3在车速6.9 km/h的最大偏差为30.90 μS/cm,测量点4在车速5.8 km/h的最大偏差为37.65 μS/cm,测量点5在车速5.8 km/h的最大偏差为147.42 μS/cm。相对车速为3 km/h的电导率检测数据,4.2 km/h和5.0 km/h电导率偏差明显小于5.8 km/h和6.9 km/h的电导率偏差。进一步表明,车速影响系统电导率检测精度,且速度越小,检测精度越高。综合考虑大田作业需求,本文设计的大田车载式电导率在线检测系统的作业速度应不超过5 km/h。

表4 不同车速下电导率检测值对比Tab.4 Comparison of conductivity detection values at different vehicle speeds μS/cm
2.2.5不同土壤坚实度对比试验

图24 土壤坚实度田间检测Fig.24 Field test of soil firmness1.坚实度检测仪传感器 2.土壤坚实度交互界面
为探究土壤坚实度对电导率检测的影响,在试验区域上,用旋耕机旋耕土壤以改变土壤的坚实度。试验过程中,土壤含水率基本在10%~14%内,由于两次检测间隔时间较短,排除温度对电导率的影响。试验如图24所示,使用自行研发的土壤坚实度仪测量地块土壤坚实度,旋耕1次的压力均值为15.52 N,记为坚实度1;旋耕2次的压力均值为14.67 N,记为坚实度2。设置传感器电极插入深度10 cm,以作业速度3.0 km/h驾驶拖拉机在旋耕地块进行土壤电导率检测,并实时在线保存检测数据。试验结束后,将检测数据导入ArcGIS软件,采用克里金插值法对数据进行差值分析,不同坚实度下电导率变化如图25所示。

图25 不同土壤坚实度下电导率检测值空间分布Fig.25 Spatial distributions of measured conductivity values under different soil firmness
由图25可知,2种土壤坚实度下电导率变化趋势相同,但电导率检测值存在差异,坚实度1区域内电导率变化范围为0~1 000 μS/cm,坚实度2区域内电导率变化范围为0~600 μS/cm。相比于坚实度1地块,坚实度2地块的电导率较小,无明显渐变分层现象。可能由于土壤坚实度越小,土壤越松软,松软的土壤使电导率传感器圆盘与土壤接触变差,导致传导信号的能力减弱。因此,在使用本文设计系统进行电导率检测时,土壤坚实度不能太小。
3 结论
(1)基于交流电流-电压四端法原理设计了车载式大田土壤电导率在线检测系统,采用高精度信号发生器作为激励源,应用数控增益放大电路产生可调的稳定输入电压信号,动态调节输出电流。系统搭载在商用车载电导率检测传感器电极上,并融合GPS定位系统,可实现田块不同区域内土壤电导率在线检测。
(2)实验室内对自制设备的性能进行研究,设计交流恒流源稳定性试验、系统响应性能试验和温漂影响试验,试验结果表明,系统具有较好稳定性,动态响应时间约为540 ms,开机预热时间引起的温漂最大偏差为3.70%,系统标定试验线性拟合决定系数R2为0.996 6,满足使用要求,该系统可用于大田土壤电导率在线检测。
(3)对系统检测精度及稳定性进行大田试验,TR-6D型电导率仪与本文设计系统电导率检测精度对比试验表明,消除温差影响后该系统检测精度R2为0.864 5~0.915 6,均高于TR-6D型电导率仪(R2为0.609 5),拖拉机振动状态相对静止状态,系统检测最大误差为10.37%,且误差主要集中在0~10 μS/cm范围内;在相同检测区域中,系统在不同插入深度、作业速度和土壤坚实度条件下进行试验,根据数据结果分析,为提高检测精度,电导率传感器圆盘插入深度应大于等于10 cm;作业速度不宜过高,应保持在5 km/h范围内;土壤坚实度不应过小,以确保传感器电极与土壤充分接触。
