应用于负序电流补偿的无锁相环并网逆变器控制策略
2022-08-04周野崔双喜樊小朝王维庆吴彬兵
周野,崔双喜,樊小朝,王维庆,吴彬兵
(新疆大学电气工程学院,新疆乌鲁木齐 830000)
三相电压不平衡是一种常见的电力系统运行工况,会严重干扰并网逆变器的输出电能质量,只有确保并网逆变器的动态性能和稳定运行,才能满足日益苛刻的应用需求[1]。
在对电网不平衡下并网逆变器的研究中,已有文献通过锁相环(phase-locked loop,PLL)在两相旋转坐标系中采用PI 控制[2]或直接功率控制[3]来实现负序电流的补偿,PLL 对相位检测的速度是影响负序电流补偿的主要因素之一。现有的PLL 方案中单同步坐标系软锁相环[4]由于结构简单、可靠性好的优势在逆变器控制中得到了广泛的应用。但当电网电压不平衡时,电压负序分量会在旋转坐标系下产生2 倍频分量,致使PLL 无法准确锁相[5]。为了解决这一问题,文献[6-7]在两相静止坐标系下,通过二阶广义积分器对电网电压进行移相来获取正序分量,以此避免了2 倍频分量的影响。文献[8]在d-q坐标系下提出的延迟运算周期滤波器具有易于实现、抗噪声能力强等特点,但在一些要求较高的应用中,通过滤波器设计显然在响应时间上是难以满足需求的。文献[9]利用正、负序解耦网络来抑制负序分量的影响,但该方法控制参数很难在线优化,动态响应时间较长。为了更好地解决三相电网电压不对称时的锁相误差,文献[10]提出了易于数字实现的改进软锁相环算法。上述改进型PLL 方案,都力图通过设计更好的滤波器以及控制器参数,以期在滤波性能以及响应时间方面获得更好的折中。此外,也有学者探索不需要锁相环的相位检测方案。文献[11]通过给定的虚拟角频率ω*= 100π构建虚拟正交信号,通过相应的开环数学运算获得瞬时电压正序分量以及对应电网相位,从而省略了闭环锁相过程。
为了进一步提高并网逆变器对负序电流补偿的能力,本文参考文献[11]无锁相环检测思想,提出一种基于虚拟矢量的无锁相环控制策略,同样给定虚拟角频率ω*并进行积分来获取abc/dq变换所需的角度θ*,利用该角度实现电压、电流的坐标变换,并据此进行d-q坐标系下的计算与控制。
本文所提控制策略因避免了PLL 跟踪电网电压的过程及参数设计困难的问题,使得整个控制系统的负序电流补偿性能得以提升,且在电网电压相位突变时有更快的动态响应速度。
1 基于矢量控制的有锁相环与无锁相环控制策略对比
图1 为并网逆变器的主电路拓扑结构,且不存在零序分量[12]。

图1 并网逆变器结构图Fig.1 The diagram of grid inverter
根据图1,并网逆变器的电压回路方程可表示如下:

式中:上标“+”、“-”分别为正、负序分量;e,u,i分别为三相静止坐标系下的电网电压、逆变器输出电压、网侧电流矢量。
由内模控制原理[13]可知,PI 调节器内只包含一次积分环节,无法对积分环节为二次输入信号实现无差控制,为了补偿交流负序电流,需通过坐标变换对其进行降阶处理,坐标变换中相位角的信息又是通过PLL 的闭环锁相而得到。
1.1 常规锁相环的检测
根据对称分量法可知,电网电压可用下式表示:
式中:φ+,φ-分别为电网电压的初相位的正、负序分量;ω为电网电压实际角频率;U+m,U-m分别为电网电压正、负序分量的幅值。
如图2 所示,PLL 需要通过闭环结构去追踪电网电压相位。

图2 PLL控制结构框图Fig.2 The block diagram of PLL control structure


式中:ωn,ξ分别为无阻尼自然振荡频率和阻尼比。
由式(8)可知PLL 在跟踪电网电压过程中产生的tr会影响电网信息的检测时间并影响后续控制系统的性能提升,尤其在电网不平衡下,需要使用改进型的PLL 方案,由文献[7]可知,在电网电压不平衡下,PLL 方案的动态响应时间大约在25 ms 左右。为了缩短系统承受负序电流的时间,需要进一步提高控制系统的响应性能。
另一方面,在电机控制当中,为了使异步电机物理模型等效于直流电动机,通常采用磁场定向矢量控制[15]。可以看出不同定向方式导致相应物理量在不同坐标系下的计量值不同。电网电压在不平衡下会发生突变,因此基于电网电压定向的坐标系并不适合作为参考。对于坐标系的选取,一般选择固定不变的量作为参考。例如,铯原子半衰期作为时间的基准。
1.2 基于虚拟矢量的无锁相环控制
如图3所示,本文采用虚拟矢量定向,通过构建固定不变的旋转坐标系,保证电网电压与旋转坐标系相对静止。以正序分量为例,直接设置固定频率f=50 Hz 为基准,通过积分得到固定相位角θ=2πft=ωt,并以θ构建两相旋转坐标系。
图3 为同步d-q坐标系和固定频率旋转d-q坐标系间的关系示意图。

图3 同步d-q坐标系和固定频率旋转d-q坐标系间的关系Fig.3 Relationships between the synchronous d-q frame and the fixed d-q frame
将固定相位θ代入变换矩阵C+abc/dq(θ)[16],变换矩阵如下:


由式(12)可知,该固定频率旋转坐标系与同步旋转坐标系之间属于线性变换,因此在控制系统设计中两者之间并无差别。且在固定频率旋转坐标系下的电网电压检测不需要在通过响应时间tr,因此控制系统的响应性能得以提升。
结合式(4)、式(9),在固定频率下旋转d-q坐标系的虚拟矢量可表示为

1.3 电网信号的正负序分离


同理可知,通过式(15)可以消除正序分量所引起的二倍频分量。
2 电网不平衡下逆变器的功率特性
结合式(1)、式(9),并网逆变器在固定频率d-q坐标系下的动态方程为[13]

式中:Pe,Qe分别为并网逆变器的有功、无功功率;P0,Q0分别为瞬时有功、无功的平均分量;Ps,Qs分别为有功、无功在正弦分布功率下功率流动峰值;Pc,Qc分别为有功、无功在余弦分布下功率流动峰值;上标“*”为相应量的给定值。且

3 基于无锁相环的负序电流补偿控制策略
图4 为虚拟矢量无锁相环控制框图,该控制策略以固定相位角θ作为park 变换的角度,DSC 分离固定频率旋转d-q坐标系下的正负序分量,通过双闭环控制器单独对负序电流进行补偿。

图4 控制系统结构Fig.4 Diagram of control system
在控制策略中,虽然网侧负序电流被抑制为零,但电网电压不平衡会依然存在,根据功率特性分析,网侧功率会发生波动,该功率波动会传递到直流母线电压侧。
为了得到有功功率给定值P*0,使用DSC 对波动的直流电压进行滤波:


式中:Imd(t)为被测量的电流值;Ima(t)为稳态时的理论电流值。
4 实验验证
在实验样机平台上验证无锁相环策略的正确性,系统结构如图4所示。
实验主要参数如下所示:直流侧电压700 V,交流电网电压380 V,采样频率10 kHz,额定功率1 kW,电压外环比例系数1,电压外环积分系数150,电流内环比例系数0.8,电流内环积分系数120,直流侧电容3.5 mF,滤波电感2.4 mH,滤波电感阻值0.1 Ω。
以双闭环补偿负序电流策略为基准,分别在双二阶广义积分器软锁相环和无锁相环策略下进行实验。
图5 为负序电流补偿的对比结果,其中最上方曲线代表的是电网电压由三相平衡状态突变为电网不平衡状态的触发过程。由图5可以看出与有锁相环控制策略相比,无锁相环控制策略能更快地补偿负序电流,大约在5 ms左右跟踪上了逆变器指令电流。
图6 为网侧电压在d-q坐标系下的方均根值和IAE 对比结果,可以看出在有锁相环或无锁相环控制策略下,三相电网电压的幅值都能够被准确检测,但在无锁相环控制策略下电网电压幅值更快达到稳态值,且无锁相环的IAE 结果仅是锁相环的50%。

图6 电网电压动态响应时间对比Fig.6 Result of negative sequence components of grid voltage in frequency invariant
为了更好地看出负序电流补偿过程,图7a、图7b 分别给出了网侧电流在d-q坐标系下方均根值和IAE 结果。由图7 可知,在无锁相环控制策略下,网侧电流更快达到稳态值,且无锁相环控制策略IAE 结果仅是锁相环控制策略的45%。图8 为网侧电流环中负序电流在d-q坐标系下方均根值结果,在无锁相环控制策略下,负序电流被更快抑制为零,大约18 ms左右。

图7 有无锁相环的网侧电流动态响应对比Fig.7 Result of negative sequence components of grid voltage in frequency variation
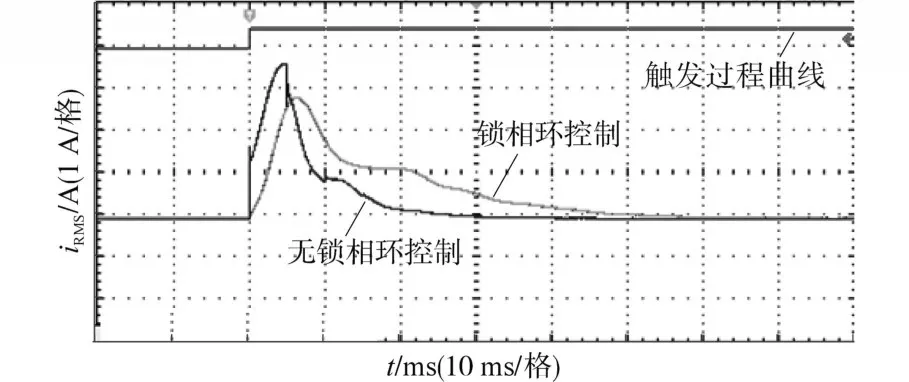
图8 有无锁相环的网侧负序电流动态响应时间对比Fig.8 Result of power response with and without PLL in frequency variation
5 结论
本文提出了快速补偿负序电流的虚拟矢量无锁相环并网逆变器控制策略,通过理论分析与仿真对比得到以下结论:
1)无锁相环控制策略无需以往锁相环控制策略的动态检测时间,避免了复杂难以实现的改进PLL方法,简化了系统控制结构。
2)在电网电压相位突变时相比于锁相环控制策略,基于虚拟矢量的无锁相控制策略具有更快的动态响应,具有一定的工程实用价值。
3)无锁相策略实施于固定频率的旋转坐标系中,不依赖电网信息检测,提高了负序电流补偿的响应时间。
