固液两相混合方法及其均匀性检测技术
2022-08-01郭长皓鸦明胜徐幼林郑加强
郭长皓,鸦明胜,徐幼林,郑加强
(南京林业大学机械电子工程学院,江苏 南京 210037)
在工农业生产中,混合是一个使两种或多种物料相互分散增加系统均匀性的单元操作过程,涉及两相、三相或多相系统,用以加速传热、传质和化学反应或物理变化,制取混合体,如溶液、乳浊液、悬浊液等。从宏观的复合材料制备、农用化学品的应用、制药、聚合物加工、饮用水和废水处理,到微观的微流通道中细胞等粒子的聚焦迁移,混合现象与生活息息相关。
固液混合是重要的混合操作之一,在许多单元操作中有着广泛的应用,如固体分散、溶解和浸出、结晶和沉淀、固体催化反应以及农药的混合等。固液两相混合的效果不仅直接影响化学反应程度、质量或传热效率、有效成分应用率、产品质量成本,还可能会对环境造成影响。因此研究高效的固液两相混合方法以及精确的混合效果检测,对于工农业生产有着重要的意义。
目前国内外对固液两相混合的研究大多集中在混合系统的结构和参数以及混合均匀性检验等方面,而对固液两相混合机理的研究则相对较少。本文基于固体颗粒在液相中的分散机理,综述了固液两相混合技术的最新应用进展,包括固相颗粒在液相中的分散方法以及对分散混合效果的检测等研究,并对各类分散混合方法及检测技术的优缺点进行比较分析,最后提出固液两相混合技术未来的研究发展建议。
1 固体颗粒在液相中的分散机理
固液混合是指固体颗粒在液相中的分散。其实质是颗粒在液相中逐渐分离散开,与液相均匀混合的过程。颗粒在液体中的分散过程主要为以下三个阶段:颗粒在液相中的润湿;颗粒群的解体;稳定颗粒的分散性,阻止颗粒再团聚。而其在液相中分散时主要由两项因素决定其分散混合效果,其一为固体颗粒与液相的作用,即颗粒的润湿,其二为液相中固体颗粒间的相互作用。
1.1 颗粒润湿
润湿过程其实就是固/气界面的消失和固/液界面的形成。如图1所示,为沾湿润湿、浸湿润湿以及铺展润湿效果。
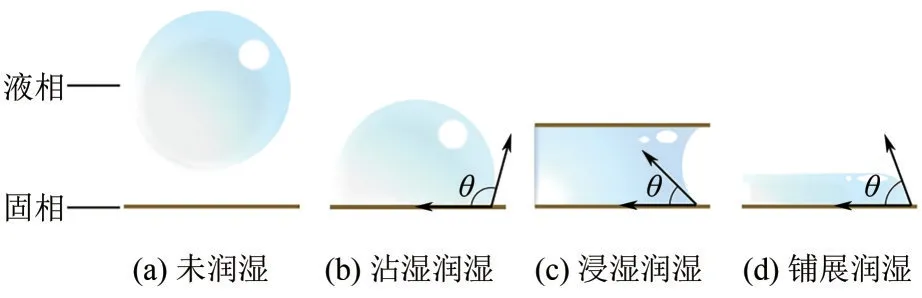
图1 润湿类型效果图
沾湿润湿是指固体表面与液体从不接触到接触的过程,即气液界面与气固界面被固液界面取代的过程;浸湿润湿是指固体浸入液体的过程,即气固界面被液固界面取代的过程;铺展润湿则是指在润湿过程中液固界面取代气固界面的同时还扩展了气液界面。
1.2 润湿接触角
固相颗粒的润湿性通常用润湿接触角来度量。润湿接触角是液相与固相接触时液固界面与液相表面切线的夹角,反映了液相分子与固相分子之间吸引力的大小,与润湿状态有着直接关系。当润湿接触角90°<≤180°时,如图1(b)所示为沾湿润湿,固体颗粒不易润湿。此时液相难以在固体颗粒表面铺展,其中越大润湿能力越小。当润湿接触角为0°<≤90°时,如图1(c)所示为浸湿润湿,固体颗粒由于气液界面的张力作用而不能完全润湿,此时若固体颗粒的粒度和密度足够大,即可浸湿到液体中。如图1(d)所示为铺展润湿,此时液体完全铺展在固体表面。值得注意的是,铺展润湿时润湿接触角=0°,图中为方便说明,放大了固液两相之间的接触角。
1.3 液体表面张力、固体粗糙度和固体表面能对接触角的影响
影响润湿接触角的主要因素为液体表面张力、固体粗糙度以及固体表面能。在单一变量条件下,固体颗粒接触角有如下变化规律。
(1)在相同材料表面上,接触角随着液体表面张力的增加而增加。
(2)在相同表面能、不同粗糙度的材料表面且当>90°时,接触角随着粗糙度的增加而增加,达到最大值后趋于稳定;当<90°时,接触角随着粗糙度的增加而不断减小。
(3)在粗糙度相同的表面,接触角随着固体表面能的增加而不断减小。
当综合考虑以上三个因素时,材料表面接触角可表示为式(1)。

式中,为材料表面的接触角;为液体表面张力;为固体表面能;为固体表面粗糙度。
1.4 润湿热
润湿过程涉及固-液-气三相体系的能量变化,在反映液相与固相表面铺展功的同时,也反映固-液-气三相之间的相互作用。同时润湿过程与热效应有着紧密联系,两者是固体表面的结构与性质以及固-液两相分子相互作用等微观特性的综合表现。在润湿过程中润湿热可表示为式(2)。

式中,为固液界面面积;为气液界面面积;、、分别为固气界面、固液界面和液气界面的表面张力。
润湿热的大小只与润湿接触角有关,且与润湿接触角成反比,故亦可用其表征固体颗粒的润湿程度及润湿过程。
1.5 液体中固体颗粒的相互作用
固体颗粒被液体浸湿后,在液体中有两种存在形式,即分散与团聚。影响固体颗粒存在形式的相互作用力包括范德华力、双电层静电力、溶剂化力、因吸附高分子而产生的空间效应力等。Derjaguin、Landau、Verwey、Overbeek 等提出的DLVO理论认为颗粒间的范德华力和双电层引起的静电作用势能之和决定了颗粒能否在一定的条件下稳定存在,其值由式(3)计算。

式中,为总势能;为范德华作用势能;为双电层静电排斥作用势能。因此当>时,颗粒之间的引力大于斥力,发生团聚;当<时,颗粒间的斥力大于引力,为分散状态。
若考虑其他力的作用,则需要在DLVO理论的基础上扩展为式(4)。

式中,为溶剂化膜作用势能;为聚合物吸附层的空间排斥作用势能。
同理,当<++,即颗粒间的排斥力大于范德华力时,颗粒分散。因此基于以上理论,可以通过增大颗粒间的排斥力促进分散,即增大颗粒间的静电排斥作用、增大溶剂化膜的强度和厚度,增强溶剂化排斥作用、增大吸附层的空间排斥作用。
2 固液分散混合方法
根据固体颗粒在液体中的分散机理,可以采取减小润湿角、提高润湿热、改变颗粒表面性能、增加颗粒间相互作用力使颗粒自发在液体中分散的化学分散方法;也可以使用合理的机械施加外力,迫使颗粒在液体中分散与液体混合的物理分散方法。
2.1 化学分散法
化学分散是一种应用较为广泛的分散方法,通常采用添加表面活性剂、偶联剂或电化学改性等方法对固体颗粒进行表面改性,改变颗粒间的相互作用力,促进粉体颗粒分散。
2.1.1 表面活性剂
表面活性剂是一种能降低液体表面张力的化学品,一般由亲水基团和亲油基团两部分组成。如图2(a)所示,它能在固体颗粒的表面形成包覆膜,产生空间电阻,改变颗粒表面的润湿性,减少颗粒间的相互作用,从而促进颗粒在液体中的分散。按其成分分类,主要分为:阳离子表面活性剂,如十六烷基三甲基溴化铵(CTAB)、聚丙烯酰胺(PAM)等;阴离子表面活性剂,如二-(2-乙基己基)磺基琥珀酸钠(AOT)、十二烷基硫酸钠(SDS)、十二烷基苯磺酸钠(SDBS)等;非离子型表面活性剂,如聚乙二醇(PEG)、脂肪醇聚氧乙烯醚(AEO)、吐温(TW)、三乙醇胺(TEA)等;以及同时含有阳离子与阴离子基团的两性表面活性剂,如十二烷基甜菜碱(DB)、十六烷基氨基苯磺酸(HABSA)等。

图2 化学分散法原理图
表1所示为表面活性剂对分散效果影响的部分研究。从表1中可以看出,表面活性剂的用量是影响固体颗粒改性的因素之一,适当地增加表面活性剂的用量不仅可以改善固相分散性,还可以增强分散的稳定性,但若过量使用反而会降低分散效果。不同类型的表面活性剂对不同固体颗粒的分散稳定性影响也往往不同,例如两性表面活性剂分子由于头部的负电荷和相反的阳离子电荷之间存在强烈的静电相互作用,因此对碳基纳米材料的吸附高于阴离子表面活性剂,表现出更好的分散性,但同时也会减弱分散稳定性。除此之外,当同时使用不同类型的表面活性剂对固体颗粒进行表面改性时,表面活性剂之间的相互作用也会影响改性效果。

表1 表面活性剂对分散效果的影响
2.1.2 偶联剂
偶联剂是一种分子中含有亲无机基团和亲有机基团两种不同性质官能团的物质,如图2(b)所示,偶联剂的官能团通过与固体颗粒表面的官能团进行脱水缩合,可以实现与固体颗粒的连接,改善其表面性能。由于其使用方便、热稳定性好、性价比高等特点而被广泛应用。偶联剂按照化学结构分类可大致分为羧酸偶联剂、聚合物偶联剂、有机磷分子偶联剂以及硅烷偶联剂等四类。相比较其他类型的偶联剂,硅烷类偶联剂在改善颗粒分散性方面的应用更加广泛。影响偶联剂对颗粒改性效果的因素有很多,除了偶联剂的种类和用量外,不同的反应环境、不同的实验温度、不同的液相pH 以及不同的反应时间都会得到不同的改性效果。且一般情况下对于不同的固体颗粒,其最佳改性条件因素也不同。
2.1.3 电化学改性
如图2(c)所示,固体颗粒的电化学改性是将固体颗粒依附在金属电极上或与电解液混合,利用电流通过固体颗粒,打破固体颗粒表面离子间的平衡,发生氧化还原反应,从而引起固体颗粒表面官能团的变化,继而使颗粒表面特性发生变化的一种固体颗粒表面改性技术。通过控制电位、电解液的成分、电极材料、通电时间等手段可以调节电化学改性对固体颗粒表面改性的效果。
综上所述,固体颗粒的化学分散由“内”出发,根据颗粒分散机理,对固体颗粒进行表面改性,或增加颗粒表面静电排斥力、空间位阻力,从而减少颗粒团聚;或引入亲水疏水官能团等改善颗粒表面的亲水性。这种方法虽然能够从根本上促进固体颗粒在液体中的分散,同时能增加颗粒的分散稳定性,但是却缺乏普适性,对于不同的固液相混合,需要选择不同的分散剂,以达到最佳的分散效果。而即使是对同一种固体颗粒,使用同一种分散剂,分散剂的用量及环境因素都会对固体颗粒的分散效果产生影响。除此之外,表面改性虽然能够较好地保持颗粒的分散性,但是这些化学试剂在有效改善颗粒分散性的同时也有可能破坏颗粒表面原有的性质,影响材料的使用。
2.2 物理分散法
物理分散是指通过物理作用使液体内部产生冲击、剪切、拉伸等外力来促使固体颗粒分散,防止团聚。常见的物理分散法包括机械分散、超声分散、静电分散等。其中机械分散是通过混合器中液相流体剪切力或其他流体力来分散固相。根据混合器结构的不同一般分为搅拌釜混合器、撞击流混合器、射流混合器、静态混合器和动态混合器。
2.2.1 机械分散
(1)搅拌釜混合
搅拌釜是一种在生物、化工等领域最常见的固液两相反应器,通过高速旋转的桨叶对釜内物料进行混合。一般情况下,通过搅拌器搅拌会产生可能同时存在的三种基本流型,即切向流、轴向流以及径向流。其中轴向流与径向流对混合起正向积极作用,而切向流会对混合起到负面作用,因此应加以抑制。而搅拌釜内挡板的存在不仅可以抑制切向流,将切向流变为轴向流和径向流,而且可以增大混合时釜体内流体的湍流程度,改善混合效果。
搅拌器是搅拌釜反应器最重要的组成部分,对混合效果有着直接的影响。如图3所示,传统的搅拌器形式主要有桨式搅拌器、推进式搅拌器、涡轮式搅拌器、锚框式搅拌器、锯齿圆盘式搅拌器、螺带式搅拌器等。不同类型的搅拌器会产生不同的流场,桨式、涡轮式、锚框式以及锯齿圆盘式搅拌器倾向于产生径向流,而推进式与螺带式搅拌器则产生轴向流,因此不同形式的搅拌器对不同粒径及浓度的固体颗粒的混合效果也不同。同时具有较大直径的搅拌器其混合能力也较好,但这种优势会随着搅拌器转速的增加而减小。在传统搅拌器类型的基础上,近年来一些新型的搅拌器被用于提升混合效果,如将锚框式与斜叶桨式搅拌器相结合的改进型框式组合桨搅拌器;将两个上下垂直分布于搅拌轴的Intermig 桨相结合的改进型双Intermig 桨搅拌器;具有不同数量、形状、倾角的叶片的改进型多叶片锚式搅拌器;由V形槽叶片代替直板叶片,减小了混合时的阻力,提高了混合效率的V形槽叶片搅拌器等。

图3 搅拌釜示意图
搅拌器的安装高度也是影响混合效果的一个因素。随着离底间隙的增加,混合系统的能量耗散会减少,搅拌器悬浮颗粒的能力降低,固体颗粒在搅拌釜底部堆积,致使系统内混合均匀性降低。然而若离底间隙太小,搅拌器叶片排出的液体流程较小,流型不能完全展开,会使搅拌器下方中心位置处的流动减弱。随着搅拌器转速的增加,搅拌器离底间隙对混合均匀性的影响也会被削弱。
搅拌器的转速往往存在一个最优值,当转速小于最优值时,混合均匀性随着转速的增加而增加;然而当转速高于最优值时,由于搅拌釜内循环流的离心力,转速的增加反而会降低混合的均匀性。
搅拌釜的釜底形状如图3所示,主要分为平底形、椭圆形和球形等,不同的釜底形状对釜内流场的影响也不同。与平底形釜底相比,采用椭圆形釜底可以有效避免流动死区的形成,而采用球形釜底可减少液体速度的损失,循环效果较好,颗粒悬浮的速度更快也更均匀。
(2)撞击流混合
撞击流混合是利用流体在撞击碰撞过程中产生的高压、高速湍流等作用对颗粒进行分散。如图4(a)所示,碰撞后的撞击流流场一般分为以下区域:①流体从喷嘴射出的射流区;②流体发生碰撞的撞击区;③流体发生碰撞后沿轴向流动的撞击流区;④撞击后向下流动的流体向上倒转流动的折射回流区;⑤撞击后直接向上流动的管流区。如图4(b)所示,根据流体雷诺数不同,混合装置内的基本流型一般有层流、过渡流以及湍流三种。在不同类型的流场中固相颗粒的运动轨迹、最大渗入深度以及停留时间也往往不同,其中撞击区的湍流动能最强,压力最大,是固液两相进行均匀分散的主要区域。

图4 撞击流流动区域分布及基本流型[59]
固体颗粒在撞击流中的分散混合主要是依靠撞击流的剪切、碰撞来实现,因此撞击流混合装置的结构不同,内部的流场特性也不同,分散混合效果也会不同。按照不同的结构参数,传统的固液撞击流混合装置有不同分类:按射流数目分为单股、双股和多股撞击流,按喷嘴形状分为轴对称和平面撞击流,按喷嘴分布分为水平对置、Y 形和多进口漩涡撞击流,按射流对称性分为对称和不对称撞击流,按环境空间限制分为自由和受限撞击流等。
撞击流混合的混合效果会受到混合器的形式、喷嘴的数目、分布、间距以及流体雷诺数等参数的影响。以常见的水平对置撞击流混合器为例,当喷嘴间距过小时,由于流体撞击面积较小,因此不利于混合;若喷嘴间距过大,则由于流体撞击的剧烈程度较弱,同样不利于混合。有研究指出,对双喷嘴水平对置撞击流混合器来说,喷嘴的最佳间距为三倍的喷嘴直径。一般而言,增加喷嘴数量可以增强撞击流混合器内的剪切力场,更有利于混合。增大流体的雷诺数同样可以促进混合,但同时会缩短流体在撞击区的停留时间,因此若应用于化学反应,选择合适的雷诺数相对于较大的雷诺数更有利于反应的进行。
近年来国内外许多研究人员对撞击流混合器在传统形式基础上进行优化改进,如将多根同轴进料管对称安装,可同时进行物料反应与混合的多组同轴相向撞击流反应器;采用分层式设计且同层进料管对置,在满足多股物料混合的同时还可以增加流场层间扰动的新型双组分层式撞击流混合器,以及进料管安装SK 静态混合元件的对称T 形混合器等。
(3)射流混合
常见的射流混合器大多为文丘里结构,如图5(a)所示。其基本原理是利用经过收缩段加速的流体在吸入室射入另一种速度相对较低的流体时,由流体间的剪切力造成的混合管路内压力分布不均,使不同压力的流体发生能量和质量交换,从而促使流体均匀混合。

图5 射流混合器[68]
射流混合器的结构参数如管径、吸入室位置、收缩段和扩散段角度等决定了固液两相混合效果。在一定范围内,文丘里管的直径越大,在吸入室处的负压越大,吸附力越强。研究表明,将吸入室垂直于文丘里管并设置在喉管后,也可以提升吸附力,利于固体颗粒的分散。当收缩段角度为21°±1°时混合效果较好,同时扩散段选用较大的角度可以减小压力损失,提高混合效果。在传统文丘里射流混合器的基础上,如图5(b)、(c)所示,Li等设计并搭建了孔式环形粉液混合实验台,利用流体流经环形喷腔流速的增加,产生较大的压降和吸附力,同时粉末吸出管采用孔状结构,避免了大量粉末同时被吸入,保证了固液两相的均匀混合。
目前对于固液射流混合器的研究绝大多数都集中在对射流混合部分结构参数的优化改进。而实际上,在固相颗粒输送过程中很容易发生堵塞,影响混合过程的进行。料斗是常用的固体颗粒存储与运输装置,通过改变料斗的出口直径及倾斜角或在料斗内增设插件都可以有效缓解料斗堵塞问题,然而目前对于料斗卸料的研究主要集中在适用于化工领域等的大型料斗,而对于适用于射流混合器进行固液混合过程中固体颗粒存储与运输的中小型料斗却鲜有研究。
(4)静态混合
静态混合器是以流体的轴向流动动能为动力,通过管内固定的各种复杂构件的作用,使流体物料在管内流动时产生分割、反转、剪切、冲击、合流等流动方式,从而引起流体层流的运动速度梯度增大或者形成湍流及新的层流,使物料充分混合。常见的静态混合器根据管内元件的不同,有SV 型、SK 型、SH 型、SL 型以及SX 型五种,如图6所示。
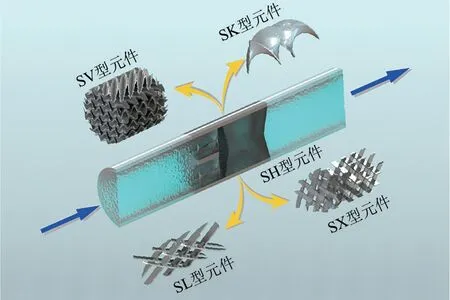
图6 传统静态混合器
静态混合器管内元件数目是影响其混合性能的因素,适当增加混合元件的数量有利于混合均匀性的提升,但当混合元件数量增大到一定值后,对固液两相混合均匀性的提升效果将不再明显。对于SK型静态混合器而言,SK混合元件的扭转角度也是一个影响混合效果的因素。有研究指出,SK 混合元件的扭转角为150°和180°时具有较好的混合效果。
为了提升混合效果,近些年来出现了许多新型的静态混合器,这些新型的静态混合器按其创新思路可以分为两大类:一类是在传统的静态混合器的基础上作出修改,如将SX型与SH型混合元件交替安装使用提高了混合效应的SXSH型静态混合器,增大SX型混合元件横杆间隙的SX plus型静态混合器,将传统SX 型混合元件几何形状修改为圆形锯齿形、三角锯齿形、方形锯齿形以及穿孔元件等的改进SX 型静态混合器等。另一类则是提出全新的静态混合元件。例如,如图7(a)所示,可以生成高效的漩涡,从而强化静态混合器管内湍流的空心十字盘式(HCD)静态混合器;如图7(b)所示,可以有效避免挂浆、破坏高分子化学品结构的三角形管壁叶片式静态混合器;如图7(c)~(e)所示,利用流体的分离和重组,增强混合效果的拆分和重组(SAR)静态混合器;如图7(f)所示,可以产生大规模纵向漩涡,增强横截面上混合效果的高效涡流(HEV)静态混合器;如图7(g)所示,采用矩形排列,从而可以极大地改变流体流动方向的LPD 型静态混合器等。

图7 新型静态混合器[79-83]
(5)动态混合
动态混合器是一种管道混合设备,一般以定子与转子为主要元件,依靠转子的旋转对管内固液两相流实现分割、扰流、剪切、挤压等一系列操作,实现两相流的混合。由于其对流体有很强的剪切作用,因此一般用于高黏度固液两相流的混合。
如图8(a)所示,为动态混合器中较为常见的球穴式动态混合器,其主要由交错排列的含空腔的定子和转子两部分组成。通过定子转子间隙可以控制混合装置内的拉伸动作,间隙越小,剪切强度越大,混合效果越好,因此定子转子间隙对于混合效果起着主要作用。另一个主要因素是转子定子上的空穴数量,转子定子上每排的空穴越大越少,每个空腔可以包含的流体体积越大,开合时间越长,混合效果越好;适当增加混合器空穴的行数也可以提升混合效果,但行数过多混合效果的提升将会不那么明显。同时进料量和操作转速以及外腔内的流型和两相流体的密度差、黏度等也会对混合效果产生一定的影响。除了常见的球穴式动态混合器,还有诸如图8(b)~(d)所示的可控变形动态混合器(CDDM),通过控制定子与转子发生相对位移,改变动态混合器的混合模式,与现有工业混合器比较,其获得等黏度产品所需的能量消耗和压力较小。如图8(e)所示是一种混合元件由混合流体驱动的螺旋转子的随动式动态混合器,由于管内随动式转子的旋转运动,聚集的颗粒受到流体剪切力的作用可以被有效地分散。然而由于过高的转速会使颗粒远离管道中心,影响径向混合效果,因此并不适用于高速流体相的混合。

图8 动态混合器[85-87]
机械分散是一种强制性分散方法,只要作用强度足够大,比较容易实现粉体颗粒的分散化。其不足之处在于,尽管超微粉体的颗粒团聚在分散器中被分散,但是粉体颗粒的表面及界面性质并没有发生改变,颗粒之间的团聚作用力依旧存在,因此一旦粉体颗粒脱离机械分散环境,很可能重新产生团聚。
除此之外,现有常见的混合系统虽然能够较好地实现固液两相的混合,但或多或少都存在些不足之处。搅拌釜混合流量大且操作简单,但是与其他混合装置相比体积较大,在混合过程中容易存在死区,而且由于需要传动装置驱动搅拌器运动,因此能耗较大。撞击流混合由于依靠两股或多股高速流体撞击进行混合,因此具有较好的传热传质特性,但其只能实现快速混合,且流体流速不宜过大,混合不够彻底。射流混合系统结构较为简单、成本低、功率消耗低且混合效率高,然而可能无法稳定地吸入固体颗粒,甚至发生堵塞,从而影响混合效果。静态混合器具有工作流程简单、结构紧凑、能耗低、操作灵活、安装及维修方便等优点,但容易造成流道堵塞,混合效果受流体流速影响较大,混合效果有限。动态混合器能够高效混合高黏度流体,且目前也主要应用于混合高黏度流体,因此相比于其他混合方法,其对固液混合的适应性较差。
2.2.2 超声分散
超声分散是将固液混合物置于超声场中,利用超声空化时产生的冲击波弱化微粒间的作用能,使其均匀分散,是一种简单、高效且成本较低的分散方法。当超声作用于流场时会在流场中形成中心-底面-壁面-中心的环流,且在超声探头附近存在最大流速,而这种环流的形成和分布会受到容器高宽比的影响。环流的搅拌作用使得容器内固液混合物在即使不添加分散剂的情况下也能均匀混合。与传统的机械搅拌分散相比,超声分散不仅混合效果更好,而且分散后的固液混合物的分散稳定性更好。
超声分散对固液两相混合物的分散效果与分散时间、声学参数及颗粒、流体性质等因素有关。固液混合物中固相的分散性会随着超声分散时间的增加而增加。然而若超声分散的时间过长,不仅有可能会导致固相产生表面形貌改变、断裂等缺陷,还会引起固液混合物温度的升高,加剧固相颗粒的共振运动,引起颗粒的二次团聚。因此,不可盲目通过增加超声作用的时间来提升固相颗粒的分散效果。超声功率的增加可以使液相流速加快,从而促进固相的分散。在一定范围内超声温度的升高也可以提升固相的分散效果,但当温度升高到一定值后,对分散效果的提升将不再明显。
2.2.3 静电分散
静电分散根据库仑定律,为粉体颗粒荷以同一极性的电荷,利用颗粒之间的库仑斥力来克服颗粒间的引力进行分散,对分子间作用力较强的超细粉体颗粒的分散效果尤为明显。但随着放置时间的增长,颗粒荷电量会逐渐衰减,因此静电分散具有时效性,且与液体混合后静电对固体的分散效果以及静电绝缘问题还有待进一步深入研究,故目前一般只能用于粉体颗粒进一步分散前的预分散。
为固体颗粒荷电的方法有接触荷电、感应荷电及电晕荷电等,其中电晕荷电的效果最好。荷电电压是影响颗粒静电分散最重要的因素,荷电电压越高,产生的电子越多,吸附在颗粒表面的电子越多,颗粒间的排斥力也越大。但若荷电电压过大电场中会产生电流,此时不再是电晕放电,颗粒无法带电。不同粒径及材料的颗粒吸收电子的能力不同,因此在同样的荷电电压下,不同粒径及材料的颗粒的分散性也会不同,通常情况下粒径较小的颗粒吸收电子的能力更强,但同时颗粒粒径越小分子间作用力也越强,完全分散需要的排斥力也越大。除此之外,若颗粒的湿度大,颗粒间的液桥力也较大,影响颗粒分散的效果。因此在采用静电分散对颗粒进行分散前最好进行干燥处理。
如前所述,静电分散对颗粒的分散效果具有时效性。随着带电颗粒在空气中存放时间的延长,带电颗粒的电荷会呈指数关系衰减,衰减率会受到颗粒属性和空气湿度等因素的影响:粒径越小、相对介电常数越高的带电颗粒,电荷衰减率越低。而通过减小空气湿度,也可以使电荷衰减率减小。除此之外,带电粒子的初始荷质比越大,衰减率也越大,但相对初始荷质比较小的带电粒子,其在整个衰变过程中的荷质比仍然较高。
3 固液两相混合效果检测技术
固液两相混合的混合过程及混合均匀性对混合的效果有着决定性的影响,因此混合过程的检测是一个至关重要的环节。通过对混合装置内固液两相的检测,可以了解混合的进程,使得混合物之间得到充分的混合,提高混合质量,同时可以减少过度混合造成的资源浪费。
现有的固液两相混合效果的检测技术按其作用形式主要可以分为两类,即侵入式以及非侵入式。其中侵入式检测主要以图9(a)所示的各类探针法为代表,而非侵入式检测包括如图9(b)所示的图像分析处理、超声衰减法、动态光散射法、电阻层析成像技术等。

图9 混合效果检测技术示意图
3.1 探针法
当探针在固液两相混合过程中与固液两相混合物直接接触时,可以通过测得的参数(如电导探针的电导率、热导探针的热导率等)来反映探针附近固液混合物浓度,继而观察随时间的变化。即通过--的变化关系定量评价混合均匀性。
常用的探针法测量主要为电导探针、光纤探针等。电导探针通过测量混合装置中电导率随混合时间的变化,得到混合装置内固液两相混合状态,因此需要液相具有导电性,且液相与固相之间的导电性具有一定的差异;光纤探针通过测量悬浊液中颗粒经过光纤探头时的反射光,并经光电检测装置将光信号转换为电信号,继而得出颗粒分散信息,但当颗粒体积分数超过2%~3%范围后光学信号与颗粒分散不存在线性关系,因此该方法仅能测量低浓度固液混合物。
除了电导探针与光纤探针外,一些其他的探针法也被应用于混合效果的测量,如:热针法利用测量探针对被测样品进行加热与测温,根据不同浓度的固液混合物具有不同的热导率,得出固液混合物的浓度;多相流视觉探针基于远心摄影,采集固液两相流的图像,对图像进行分析得到颗粒的体积分数,用式(5)计算。

式中,是颗粒体积分数;是视觉探针拍摄到的颗粒数;V是拍摄到的第个颗粒的体积;是探针镜头的景深;是测量视口的横截面积。
探针法是一种简单廉价的固液两相混合监测方法。但是由于探针法的测量过程是侵入式的,且一般测量的是局部浓度,因此实际应用中往往需要同时使用多个探针来测量整体的测量属性空间分布,而探针的存在引起的流体流动的扰动会改变混合机制,从而导致测量结果不具有代表性。此外,实际操作过程中,固液混合物可能会污染探针影响测量结果,甚至会损坏探针。同时探针也存在安装困难等实际问题。
3.2 图像分析处理
图像分析处理是一种简单且具有高分辨率的固液混合检测分析技术。它是通过拍摄透明管道后的混合装置的一个小区域,并用这个区域表征整个混合物的测量技术。通过高速摄像机能够直观地观察混合过程中固液两相的混合情况,也可以通过对图像进行预处理进而获得颗粒在液相中的运动轨迹及运动速度,但无法直接定量地获得固液两相混合的均匀性。因此,如何通过获得的图像来定量评价固液两相混合的均匀性一直是图像分析处理过程的研究热点。
Sette 等通过分割出图像中的固相颗粒来标记颗粒质心,并使用Kalman 滤波器,通过分析连续帧中颗粒的分布来获得颗粒的运动轨迹和速度。同时定义式(6)为颗粒混合指数来评价固液两相混合的均匀性。

式中,为检测到的颗粒数;为颗粒总数;为每个视频中最后一次观察到的颗粒对应的时间。当= 1 时,视为完全混合。Le Coënt 等提出一种腐蚀盒计数法的图像处理技术,基于分形维数及其在图像连续腐蚀过程中的演化来跟踪混合物的均匀性。Xiao等提出了一种基于熵理论,直接应用于流场成像的测量微颗粒混合均匀性的方法,通过式(7)计算直接成像技术局部混合系统的均匀性指数来表征Zn-Fe-SiO复合镀层流场电沉积过程中微粒沉积的均匀性。

式中,g为分割区域R中的像素的值(一张图片由个独立的矩形组成,=1,2,…,);ˉ为g的平均值;表示图像熵。当=1 时混合均匀性最好。
以上对于固液两相混合均匀性的分析都是基于二维平面图像,这对于实际上呈三维空间分布的固相颗粒的均匀性表达具有一定的局限性。针对这一问题,代祥等通过采集水平与垂直视角下固液混合物的图像,根据呈垂直关系的两个视角图像中颗粒横向坐标的一致性,对颗粒进行匹配,重构出颗粒的三维空间坐标。并提出基于空间体积加权法的颗粒空间分布均匀性指数的计算方法,即式(8)。

式中,ϕ为控制体分块内颗粒数量;为控制体内平均颗粒含量;V为控制体分块体积;为控制体内分块数量。同样,当= 1时混合均匀性最好。然而这种颗粒坐标三维重构的方法仅适用于固相颗粒浓度较低的固液混合物。除此之外,由于图像的获取是通过相机对混合装置内的混合物进行拍摄,要求混合装置必须是透明的,或者在测量位置是透明的。其次图像分析技术测量的只有成像面上的混合情况,若该平面上固液两相混合效果不好或者颗粒沉积在容器壁上都会影响整体的测量结果。同时为了便于对图像进行分析往往需要通过附加照明条件以获得高对比度图片,然而这在实际工农业生产中很难实现。
3.3 超声衰减法
超声衰减法是利用超声波在固液两相流中传播时由于固体颗粒的粒径、浓度等因素的不同,导致超声波由于散射、吸收等产生衰减的衰减系数不同,来对固液混合物浓度或固体颗粒分布进行测量。由于其控制的快速响应以及容易实现在线监测等特点而被应用于固液两相流混合效果的检测。
超声的衰减与颗粒粒径及浓度的关系直接影响检测精度。针对这一问题Carlson 等推导了超声波通过低浓度固液两相流,不存在多重散射时超声的过量衰减系数()的理论表达式,见式(9)。通过检测颗粒质量分数低于10%的白云石颗粒悬浮液的质量浓度分布验证该理论表达式的准确性。

式中,为脉冲的样本数;[]为质量分数为时接收到的脉冲采样版本;[]为纯水中相应的测量值。
Stener等探讨了脉冲回波超声在高浓度固液混合物中应用的可能性,基于互相关的方法对固液混合物中一维和二维颗粒速度进行了局部化测量,并从后向散射信号的功率谱密度中提取局部颗粒浓度信息。Shi 等以粒径小于10μm 的碳酸钙及黄泥为对象,研究了不同成分的颗粒及颗粒浓度对超声衰减的影响,结果表明,由于碳酸钙的沉积特性,其悬浊液分布较为不均匀,导致测量误差更大。
除此之外,温度以及混合过程中由于实际操作引入的外在因素也会对超声波的衰减产生影响,因此Huang等设计了一种用于同时测量固体悬浮液的浓度和流速的新型便携式超声波装置,并对超声波在固液溶液中的传播进行温度补偿,通过实验数据拟合分别建立了超声波在高岭土与水的混合物及泥沙与水的混合物中衰减随浓度和温度变化的关系,见式(10)与式(11)。

式中,为高岭土的浓度;为泥沙浓度;为超声衰减系数;为温度。
而Zhan 等针对搅拌釜内固液混合过程中会引入空气形成气泡从而影响混合效果监测的问题,提出了一种基于超声光谱和协同区间偏最小二乘回归(Si-PLS)模型相结合的在线监测含气泡的固液混合物颗粒浓度的方法,并通过跟踪回波信号,用式(12)定量计算了混合均匀性Hom。


上述的超声衰减法往往仅限于测量固液混合物中的固相或液相,而不能同时测量。为了监测工农业生产中结晶等需要控制晶体生长与尺寸以获得所需的高质量产品的特殊混合,Stelzer等使用超声结晶监测技术(UCM),通过在固液混合物中浸入两个超声传感器,一个滤网保护的超声传感器与一个直接暴露在悬浊液中的超声传感器,同时测量结晶过程中悬浊液密度、固相平均晶粒尺寸和液相浓度。然而该技术无法测量混合过程中结晶体的粒径分布。
3.4 动态光散射法
动态光散射法的基本原理是在激光光源的照射下液体中的颗粒由于布朗运动,其散射光强在某个固定散射角上相对于某一平均值会随机涨落,涨落的速度与颗粒的粒径有关。因此通过对散射光强做自相关运算,得到光强的自相关函数,利用反演算法对光强自相关函数进行反演,便可直接获得颗粒的粒度信息。然而由于动态光散射法的检测效率高、成本低以及非侵入性,因此不乏有研究者利用动态光散射技术来测量固液混合物中的颗粒浓度。
Vysotskii等通过测量单分散系统中散射强度分布及纳米颗粒尺寸分布,计算颗粒的平均粒径及其权数,获得颗粒平均粒径的颗粒浓度,继而转换为总的颗粒浓度。Minelli等采用累积量法通过多分散指数和散射光强度加权谐波平均半径来表示颗粒粒径,根据散射强度、折射率、吸收率及粒径分布来估算相对体积浓度,继而用相对体积浓度与单个颗粒体积的比值来估算颗粒浓度。Austin等采用多角度动态光散射技术,基于强度加权粒度分布到绝对浓度的转换来测量纳米颗粒的浓度。Dan等利用Turcu提出的有效散射相位函数研究了在一定散射角下,固液混合物中光散射强度随目标光学深度的变化规律,并通过实验比较发现该方法可以快速测量μg/L浓度范围内固液混合物的浓度。
由于多重散射的影响,一般的光散射技术仅适用于低浓度悬浊液。针对高浓度固液混合物,采用低相干动态光散射技术,利用低相干光源的特性,将低相干干涉计与动态光散射技术结合,实现光程可分割的从单散射到多次散射散射光光谱的测量,同时有效抑制从高浓度固液混合物中散射的多次散射光,继而通过单散射理论从检测到的单散射光信号中获得颗粒的动态信息。但测量区域一般局限于固液界面附近。在低相干动态光散射法中,光的入射深度对测量结果的精度有着很大的影响,当入射深度过深时,测量结果会受到多重散射光的影响;而入射深度过小时,会受到固液界面拖曳效应的影响,即颗粒在固液界面附近的扩散会受到容器壁的影响导致速度减小。针对这一问题,夏辉等采用相位调制低相干动态光散射,通过研究固液界面壁的拖曳效应对颗粒粒径测量的影响,对在不同入射深度的颗粒粒径利用拖曳效应相关修正因子进行修正。
动态光散射技术的测量精度还会受到样品的特性,如折射率、黏度、光学性质等因素的影响。此外,由于颗粒形状对光散射的影响,该方法不适用于球形颗粒以外的颗粒。因此动态光散射技术并不能广泛适用于实际工农业生产中的颗粒浓度测量。
3.5 断层扫描技术
断层扫描技术通过测量被测区域内固液混合相多个横截面的图像,加以组合形成三维参数剖面来确定固液两相的混合均匀性及识别混合强度的空间变化等。断层扫描技术包括电阻层析成像(ERT)、电容层析成像(ECT)、磁共振成像(MRI)、X 射线和伽玛射线层析成像等。其中ERT 技术利用分布在容器壁上的阵列电极,通过成对的电极依次施加激励(电压或电流),在混合物中建立敏感场,测量剩余的电极上的电性能(电压或电流),并通过反演算法重新建立截面上的电导率分布,获得断层图像。由于其可以获得大量的流场特征参数、响应速度快、成本低且能够提供连续二维和三维的可视化信息,被广泛应用于宏观和微观的固液混合物的浓度测量。因此,本文将主要综述电阻层析成像(ERT)及其算法的研究情况。
ERT 图像反演算法对ERT 系统的性能有着决定性的影响,包括迭代算法以及非迭代算法。常见的迭代算法包括Newton Raphson算法、共轭梯度法(CG)等;常见的非迭代算法包括线性反投影算法(LBP)、Tikhonov 正则化算法等。其中迭代类算法重建图像质量好,但图像重建速度慢,而非迭代类算法虽然重建图像速度快,但重建图像的质量差。
为了能更加快速地获得更加精确的重建图像,研究人员针对传统算法进行了研究优化。李守晓等针对Tikhonov正则化参数选择问题,提出了一种基于同伦映射,并参考使用人工神经元网络的非线性函数Sigmoid 调节正则化参数,将得到的图像灰度值作为迭代初始值,提高了重建图像的质量。刘铁军等提出了一种双极性脉冲电流源激励及改进LBP算法,不仅提高了数据的采集速度,而且获得的图像质量要明显优于传统LBP算法。李秀艳等基于CG 算法,提出了一种改进CG 算法。首先对图像重建前的数据进行归一化处理,将求解空间投影到较低维度的Krylov子空间,然后通过共轭梯度法求解低维子空间中的反问题,在保证图像精度的前提下减少了迭代次数,提高了图像重建速度。马世文等将ERT 物理模型进行规范化和Tikhonov 正则化处理,提出了一种基于QR 分解的对称共轭梯度(QRSCG)算法,QRSCG 算法的成像效果优于对称共轭梯度(SCG)算法和CG算法,且图像重建时间仅为SCG 算法的(1/300)~(1/200)、CG算法的(1/400)~(1/300)。
虽然上述优化的图像反演算法能够有效地提高图像的重建速度和精度,但依然存在无法同时兼顾图像重建速度和精度的问题。除此之外,ERT的灵敏场分布具有马鞍面分布的软场特性,即靠近边缘检测灵敏度高,靠近中心检测灵敏度低,这对混合效果的检测精度具有一定的影响。
综上所述,不同检测方法的原理不同,但对于混合均匀性的评价却可大致分为两类:第一类是直接测量固液混合物的浓度评价,可以通过观察浓度随时间的变化来判断混合均匀性;第二类是非接触测量固液混合的浓度评价,如图像分析处理、超声衰减法、动态光散射法、断层扫描技术等。这些不同的方法均可以通过不同的检测值及其标定值来定义混合均匀性指数,其值为1时为完全混合,其值为0时为完全不混合,而在动态监测过程中,混合均匀性指数随时间的变化还可以更加直观地反映固液两相的混合进程。
4 结语
本文对固液两相混合的混合机理、混合方法、混合效果检测技术进行了综述。总的来说,相对于对宏观混合方法的研究,对微观的混合机理的研究相对薄弱,因此未来要继续深入研究固液两相的混合机理,进而改进或提出新的混合方法。另外,随着人工智能技术的不断发展,将人工智能技术应用于固液两相的混合及其混合效果的检测中,可以为其提供更加高效、更加广阔的发展空间。结合本文综述的基础,提出如下研究建议。
(1)开展综合混合方法研究。鉴于化学分散从“内”出发,通过改变颗粒间的斥力从“内”改变颗粒的分散性,使粉体颗粒具有良好的分散稳定性,但化学分散不具备普适性;而物理分散致力于“外”,通过施加外力(如机械、超声、静电、射流等)迫使颗粒分散混合,具有普适性,但颗粒的分散稳定性差。因此未来可以“内外兼修”,将化学分散和物理分散两者更有效地结合起来,开展综合混合方法研究,以期获得更好的混合效果。同时,将分散方法和混合方式有机结合起来,研究基于不同分散机理的最优混合方法组合,为提升固液混合效果提供良好的解决方案,如研究基于静电分散的射流混合技术等。
(2)开展微观混合机理的研究。微流体的扩散与混合的研究对化学及生物技术的发展、纳米材料以及微纳机电系统的研发等都有着举足轻重的作用,因此需进一步开展微混合器结构及其系统研究,加大微尺度下在微流动过程中热、声、磁、电的流动理论研究,通过其在微尺度下固液混合过程中的扩散强度、雷诺数以及其他流动特性的影响研究,推动微观混合机理及其混合效果的研究。
(3)开展基于人工智能的固液两相混合技术研究。对于未来人工智能在固液两相混合技术方面的融合应用,建议考虑以下三个方面。
①混合系统的智能设计。任何混合系统的结构参数及工作参数都是影响固液混合效果的决定性因素,而以往的这些参数主要来源于经验和试验,也不能从总体上对各参数进行精确匹配及优化,很难寻求最佳的混合效果,因此利用人工智能技术理论来提升混合系统的设计效率应为今后研究的重点。开展“内外兼修”综合混合的颗粒物分散信息平台建设,利用云计算、大数据等技术与固液混合技术进行融合,研究基于深度学习的智能化固液混合系统设计方法并进行平台建设,发挥人工智能对固液混合技术的助推作用。
②混合均匀性的智能检测。固液两相的混合效果是产品质量等的决定性因素,通过各种检测技术可以得到混合过程中固液混合物浓度的变化或定义混合均匀性指数来评价实际的混合效果及混合进程。但实际上,现有的检测技术绝大多数都是通过各种检测方法得到测量数据,然后经过“人”对这些数据进行观察或分析来判断是否完成混合及混合的均匀性,因此难免会产生滞后性。人工智能等技术的快速发展,不仅可以为固液两相混合的混合效果检测提供技术和理论支持,同时可以提供一定的数据处理预测功能,做到脱离“人”的实时在线监测。因此,应开展基于深度学习框架下的固液混合均匀性检测与算法研究,研究混合效果的智能化分类及其评价体系,如通过分析固液混合物浓度的变化对是否为均匀混合进行分类,或在线建立混合均匀性指数,实时定量评价固液混合物的混合均匀性等。这不仅可以提升检测精确度,而且能极大地提升检测的速度。
③混合系统的智能控制。将固液两相混合的混合均匀性持续稳定在某一具体指标要求下,将是提升固液混合效果和效率的最终目标。研究基于可编程控制器的固液混合在线控制系统,通过智能控制系统,结合智能设计与智能检测,提出如图10 所示的固液两相智能混合技术,即由智能检测系统实时获得固液两相的混合效果数据,将其反馈给智能控制系统,再由智能控制系统结合经过学习训练的智能设计神经网络,实时改变实验参数,而智能检测系统获得的新数据可以用来继续训练智能设计网络,最后实现混合效果持续稳定地达到某一理想值。

图10 固液两相智能混合技术概念