喷水推进器转舵装置的模糊自适应比例-积分-微分控制
2022-07-28刘海松张博伦孙小龙张宇
刘海松, 张博伦, 孙小龙, 张宇
(1.海军装备部驻宁波地区军事代表室, 宁波 315000; 2.中国船舶重工集团公司第七一一研究所, 上海 200003;3.大连船用推进器有限公司, 大连 116000; 4.92453部队, 福州 350000)
近年来,喷水推进技术在高性能、高速舰船领域已经得到了广泛的应用[1-4]。喷水推进技术的原理是利用推进泵进出水流的作用与反作用力来产生推力,并通过转舵装置和倒航机构来控制改变喷流方向,从而实现对舰船的操纵控制[5-6]。实际装备运行过程中,喷水推进器转舵装置及操控系统在复杂海况中受到外部干扰的影响较大,常规比例-积分-微分(proportion-integration-differentiation,PID)控制难以满足其控制性能指标要求,为提高喷水推进器转舵装置的抗干扰性能,国内外研究人员展开了深入的研究。文献[7]针对机电液伺服系统运行过程中存在的多余力干扰问题,提出了基于PID的改进人工蜂群控制算法。文献[8]针对传统的位置跟踪伺服系统存在跟随性能与抗干扰性能相互矛盾的问题,提出了将干扰观测器与2自由度控制相结合的控制方案,大大提高了系统的鲁棒性能。文献[9]提出了对喷水推进器左右操舵机构同步控制策略,通过仿真和现场样机试验采样数据对该方法进行了验证。
虽然上述理论研究方法取得了较好的实验效果,但存在与目前常用的基于可编程逻辑控制器(programmable logic controller,PLC)的集控系统难以相结合的矛盾,同时实际工况中喷水推进器在复杂海况下存在着转舵装置控制精度不高、抗干扰性能不强的现实问题。基于上述原因,现以实验室现有设备喷水推进器为对象,以常规PID控制为基础构建模糊自适应PID控制系统,设计控制策略,建立系统模型并进行仿真分析,最后搭建以PLC为控制核心的试验平台并进行相关试验研究。以期为喷水推进器转舵装置的控制问题提供解决方案,也为其他类似装置(如气垫船空气舵)的控制策略提供参考。
1 控制系统设计
1.1 模糊自适应PID控制策略总体结构
喷水推进器转舵装置在实际运行中存在风浪等外界干扰因素较多,常规PID控制将难以获得较高的控制精度。针对这一问题,建立模糊自适应PID控制系统,以改进对喷水推进器转舵装置的控制效果,其控制结构如图1所示。图中虚线部分为模糊自适应PID控制器,其控制原理为根据系统所设定舵角与反馈舵角之间的误差e以及误差变化率ec,通过模糊计算得到控制量,从而达到控制舵角的目的。为了提高控制器的自适应性能,在系统工作过程中利用模糊控制规则在线对PID控制器的3个参数KP、KI、KD进行整定。

图1 转舵装置模糊自适应PID控制系统结构Fig.1 Fuzzy self-adaptive PID control system structure of rudder device
1.2 模糊规则制定
图1中模糊自适应PID控制器选取的输入量为设定舵角与反馈舵角之间的误差e以及误差变化率ec,常规PID控制器变量参数的增量值ΔKP、ΔKI、ΔKD为输出量。舵角误差e的物理论域为[-25,25],舵角误差变化率ec物理论域为[-0.02,0.02],模糊论域为{-3,-2,-1,0,1,2,3},模糊子集均为{NB,NM,NS,ZO,PS,PM,PB},即{负大,负中,负小,零,正小,正中,正大}。隶属函数采用Mamdani型函数,则输入变量和输出变量的隶属度曲线如图2、图3所示,确定模糊控制表如表1~表3所示。
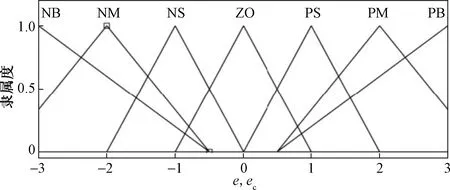
图2 e、ec的隶属度曲线Fig.2 Membership curves of e and ec
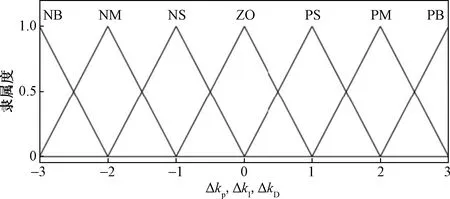
图3 ΔKP、ΔKI、ΔKD的隶属度曲线Fig.3 Membership curves of ΔKP,ΔKI and ΔKD

表1 ΔKP的模糊控制表Table 1 Fuzzy control table of ΔKP
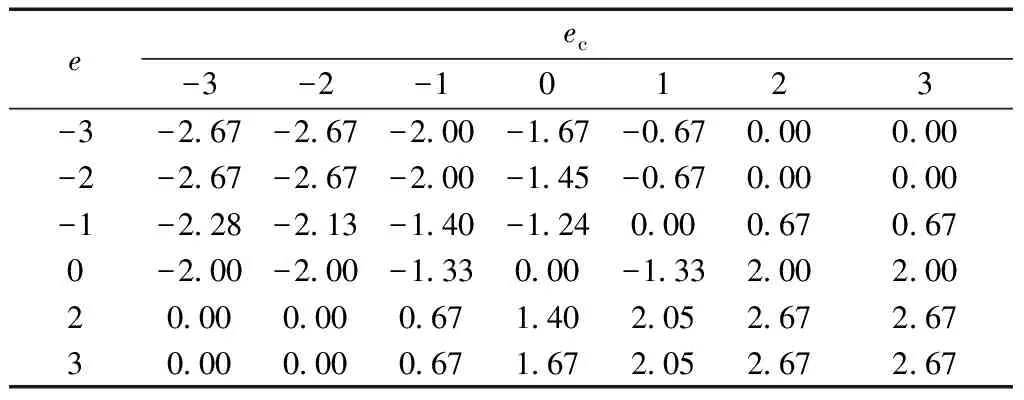
表2 ΔKI的模糊控制表Table 2 Fuzzy control table of ΔKI

表3 ΔKD的模糊控制表Table 3 Fuzzy control table of ΔKD
2 系统建模与仿真
2.1 转舵装置工作原理
喷水推进器转舵装置工作原理如图4所示,其控制过程为:驾驶人员根据航行需求操纵舵轮时,设定角度信号经上位机处理后传送至液压系统,由液压缸驱动方向舵转动相应的角度,安装于转舵装置上的传感器将转动角度位置信号采集传送至控制系统,系统根据设定舵角与反馈舵角的差值进行调节,从而完成转舵装置的闭环控制[10-14]。
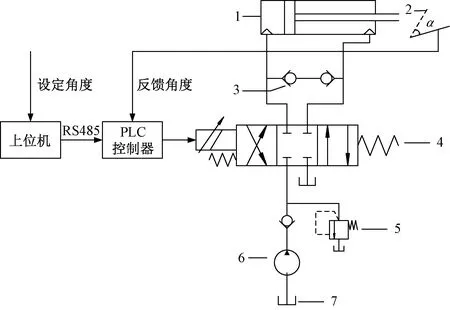
1为液压缸;2为舵轮示意;3为梭阀;4为比例阀;5为溢流阀;6为液压泵;7为油箱;α为方向舵转动角度图4 转舵装置结构原理图Fig.4 Structure diagram of rudder device
2.2 转舵控制系统建模
2.2.1 液压缸数学模型
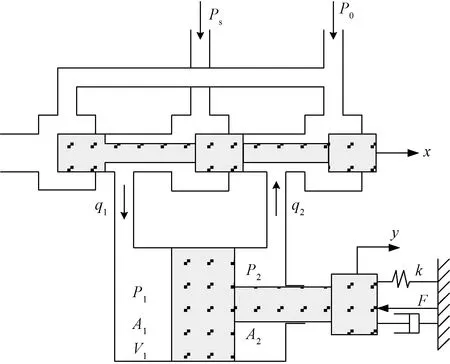
Ps为供油压力;P0为回游压力;q1为左侧腔流量;q2为右侧腔流量;P1为左侧腔压力;P2为右侧腔压力;x为阀芯位移;A1为左侧油液作用面积;A2为右侧油液作用面积;V1左侧油腔体积;k为负载弹簧刚度;F为弹簧弹力;y为活塞位移图5 阀控非对称液压缸结构Fig.5 Structure of valve controlled asymmetry hydraulic cylinder
喷水推进转舵装置液压缸的类型为阀控非对称液压缸结构,其模型如图5所示。液压缸中两个工作腔的油液作用面积不同,即A1≠A2,一般取ε=A2/A1[15-16]。由于液压系统本身存在非线性特性,为方便计算,根据实际情况,在模型分析中进行合理简化和假设[17-19]:供油压力PS恒定,回油压力P0=0;液压缸每个工作腔内各处压力相等;忽略液体阻力和惯量对负载位移的影响。
忽略非线性摩擦因素,根据液压系统的工作原理,可得液压缸活塞的力平衡方程为
(1)
式(1)中:m为活塞杆及相关部件的总质量,kg;BC为活塞的黏性阻尼系数,N·s/m;k为负载弹簧刚度,N/m。
由流体力学可得,液压缸左侧腔的流量为
(2)
(3)
式中:cd为阀芯的流量系数;ω为阀芯的面积梯度,m2;x为阀芯位移,m;ρ为液体密度,kg/m3。
当活塞处于匀速运动状态时,则有
(4)
由ε=A2/A1可得
(5)
定义负载的压力为
PL=P1-εP2
(6)
综合式(2)~式(6),可得
(7)
由负载流量的定义,可得
(8)
负载流量的增益可得
(9)
负载流量的压力增益可得
(10)
综合式(8)~式(10),可得线性化流量方程的表达式为
qL=Kqzx-KpzPL
(11)
液压缸内的油液本身具有可压缩性,并假设活塞两腔初始容积相等,则液压缸的流量连续性方程为
(12)
(13)
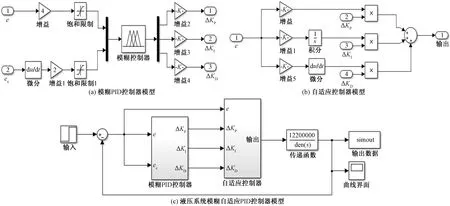
图6 仿真模型Fig.6 Simulation model
式中:V0为液压缸总体积的一半,m3;βe为液压油的等效体积弹性模数,N/m2;Ci为液压缸活塞的有效面积;Cs为液压活塞的位移。
整理可得
(14)
2.2.2 比例阀数学模型
转舵装置中的比例阀可看作为比例环节[13-14],则电压输入u与阀芯位移xv的传递函数可表示为
(15)
式(15)中:K1为增益,m/V。
2.2.3 转舵机构数学模型
转舵机构喷口的角度θ与液压缸位移y之间的关系为
(16)
式(16)中:r为转舵机构喷口的转动半径,m。
2.2.4 模型总成
综上,系统输出量可表述为
(17)
2.3 仿真分析
在MATLAB/Simulink环境下建立喷水推进器转舵装置模糊自适应PID控制器仿真模型,如图6所示。模型仿真参数设置如表4所示。在搭建仿真模型的基础上,对模糊自适应PID控制和常规PID控制进行对比仿真研究。舵角设定值从-20°开始,之后每10 s变化一次,仿真时间60 s,舵角跟踪仿真曲线如图7所示。由图7可知,舵角变化量为20°时,模糊自适应PID控制曲线达到稳态时间比常规PID控制曲线提前20%;当舵角由正向负进行40°大角度转舵时,模糊自适应PID控制曲线达到稳态时间比常规PID控制曲线提前25%,且超调量在各阶段几乎都减少为0。因此,与常规PID控制相比,模糊自适应PID控制响应快速、跟踪性能好,且超调量较小。
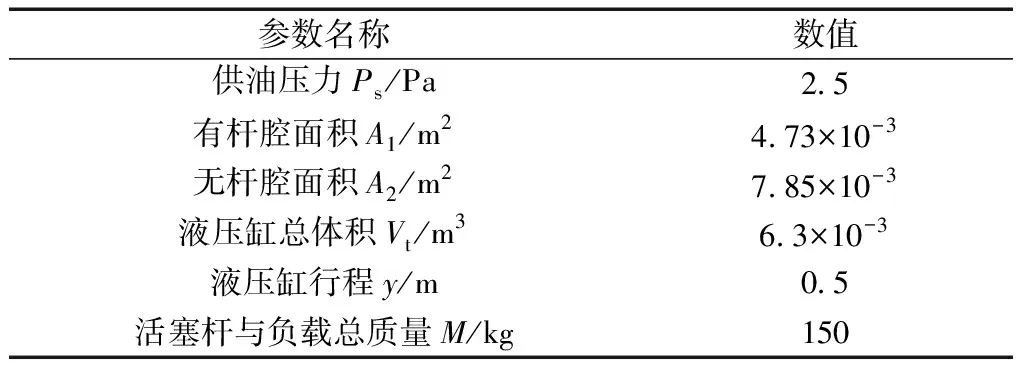
表4 模型仿真参数Table 4 Parameters of model
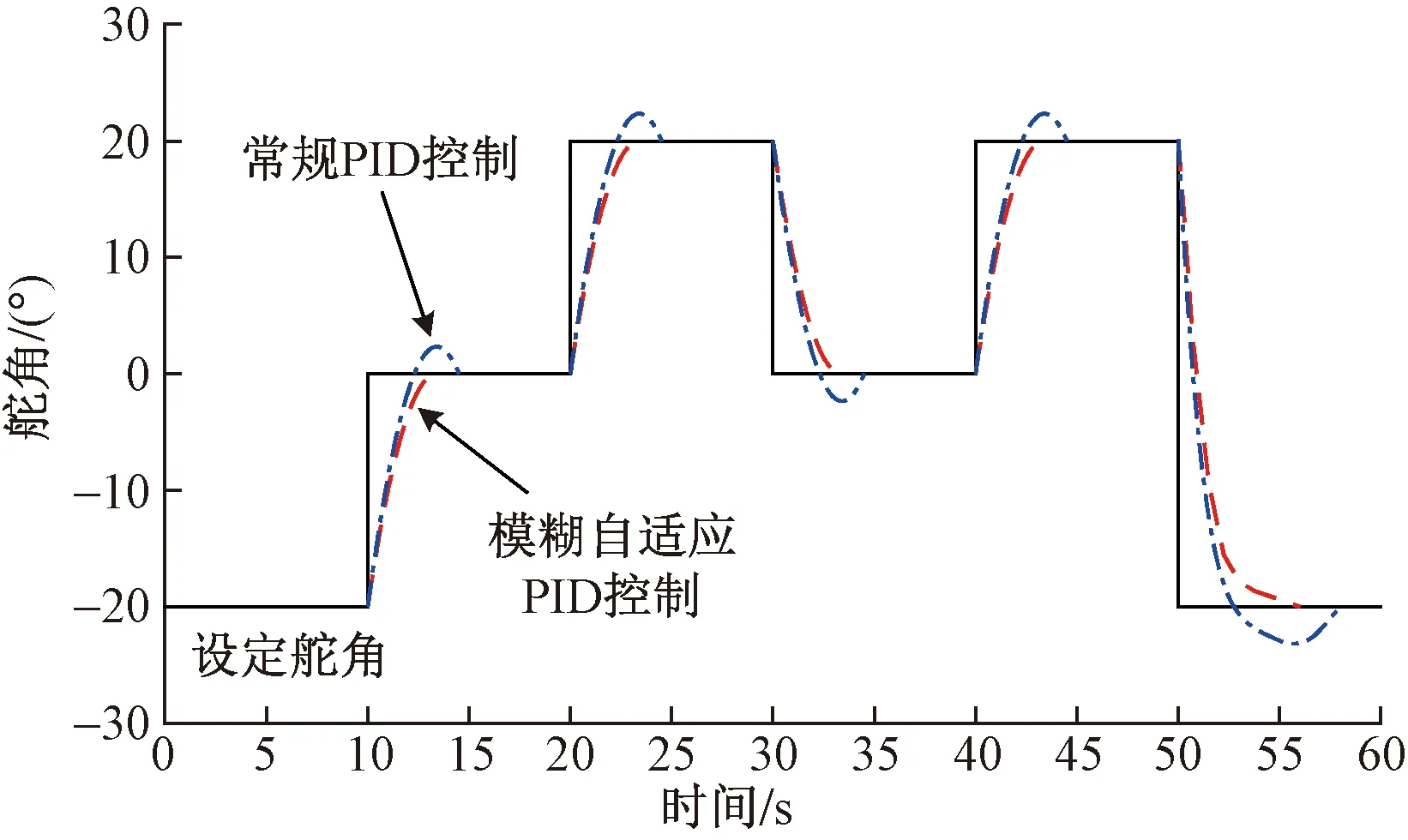
图7 舵角控制过程仿真曲线Fig.7 Simulation curve of rudder angle control
3 试验验证
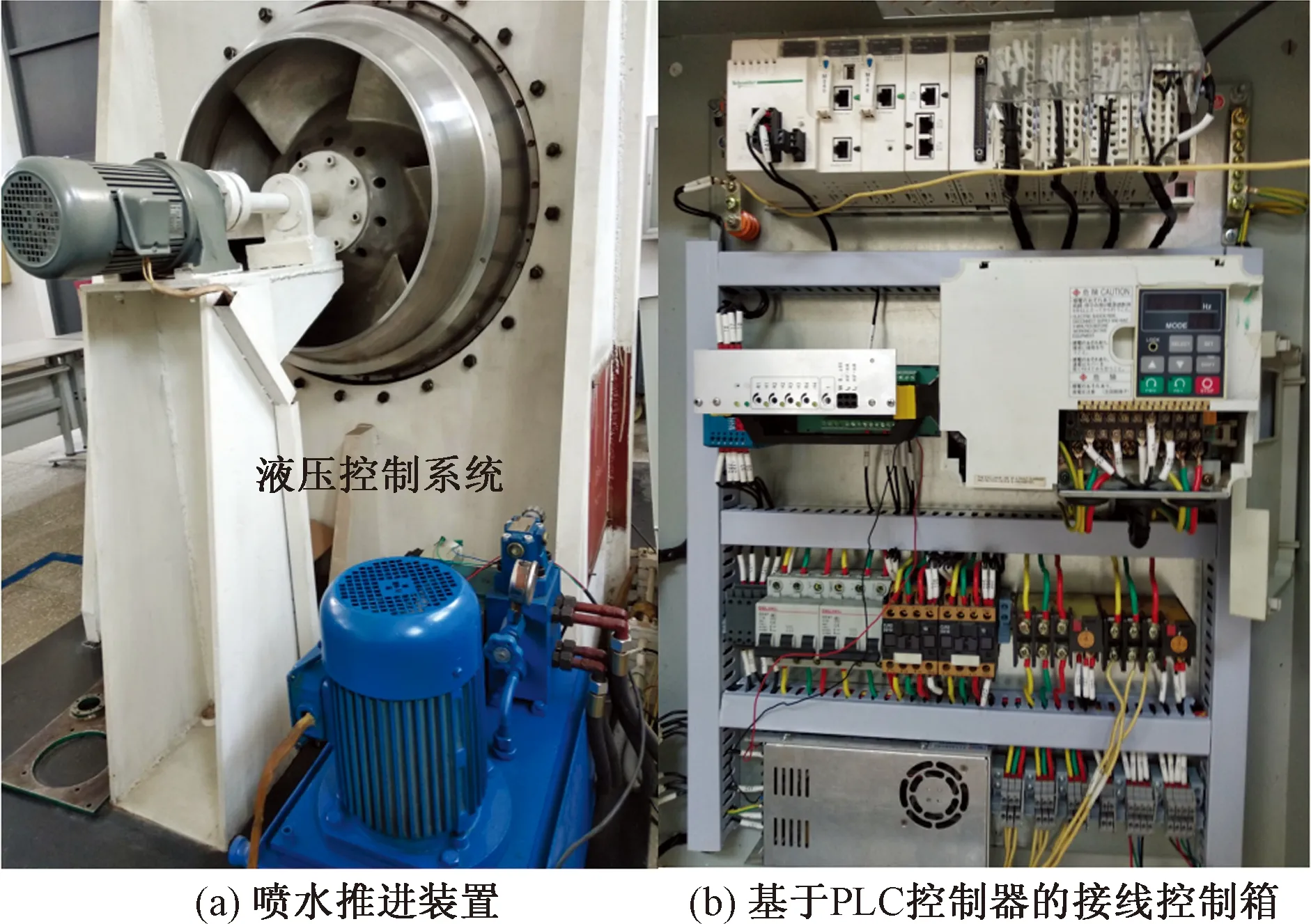
图8 试验装置Fig.8 Experiment device
以实验室现有喷水推进器样机为对象,构建以施耐德M340 型PLC控制器为核心的监控装置,进行舵角闭环控制响应试验和抗干扰试验。试验装置如图8所示。试验过程为设定舵角由0°转到25°,在t=70 s时施加10%的负载干扰,分别采用模糊自适应PID控制和常规PID控制方案,得到在两种控制策略的舵角响应曲线如图9所示,分析可得舵角控制指标如表5所示。
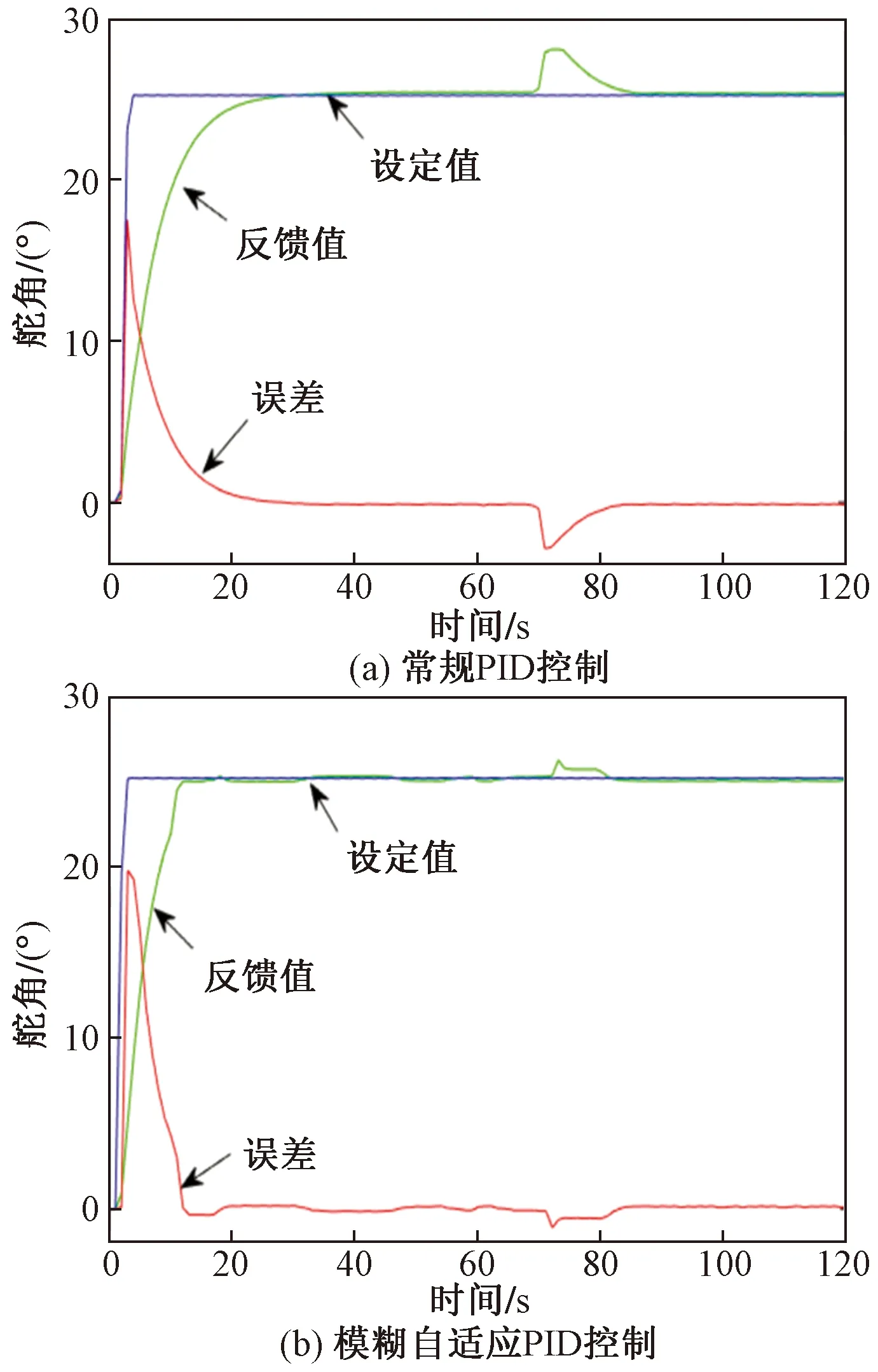
图9 试验曲线Fig.9 Experiment curve
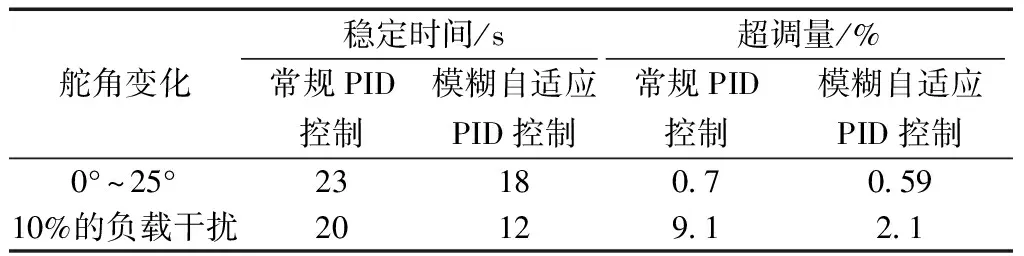
表5 舵角控制指标对比Table 5 Contrast of rudder angle control indicators
由表5可得,设定舵角由0°转到25°在常规PID控制下的稳定时间为23 s,超调量为0.7%;而模糊自适应PID控制的稳定时间为18 s,超调量为0.59%。在10%的负载干扰下,常规PID控制下的稳定时间为20 s,超调量为9.1%;而模糊自适应PID控制的稳定时间为12 s,超调量为2.1%。由此可见模糊自适应PID控制效果优于常规PID控制。
4 结论
在常规PID控制喷水推进器转舵装置的基础上,引入模糊自适应控制,建立了适用于喷水推进器转舵装置的模糊自适应PID控制系统。在MATLAB/Simulink中建立了模糊自适应PID控制系统仿真模型,依托实验室现有样机,搭建了以PLC控制器为核心的试验平台。仿真及试验结果表明,采用模糊自适应PID控制的喷水推进转舵装置具有响应速度快、稳定性强、超调量小、抗干扰性强的优势。
