微机械陀螺仪零偏稳定性的温度响应测试评价
2022-07-27杜晓辉朱敏杰王凌云路文一
杜晓辉,刘 帅,朱敏杰,刘 丹,孙 克,王凌云,占 瞻,路文一
(1.机械工业仪器仪表综合技术经济研究所,北京 100055;2.沈阳仪表科学研究院有限公司,辽宁沈阳 110043;3.厦门大学,福建厦门 361005;4.瑞声开泰科技(武汉)有限公司 湖北武汉 430000;5.北京遥测技术研究所,北京 100076)
0 引言
基于硅和石英等材料的微机械陀螺仪具有微型化和低功耗等优势,是姿态测量的主要传感器,广泛应用于消费电子、工业和航空航天装备等[1],其中高精度的微机械陀螺仪一直是学术界和高端装备制造领域关注的热点。评价陀螺仪精度水平的主要指标之一是零偏稳定性,因此提升陀螺仪零偏稳定性对开发高精度陀螺仪十分重要。
零偏稳定性是指微机械陀螺仪在零输入角速度下输出信号的稳定程度,零偏稳定性越好,陀螺仪精度越高。温度参数已明确为微机械陀螺仪零偏稳定性的主要驱动因素[2],由于材料特性和结构应力会随着温度变化而变化,导致微机械陀螺仪谐振频率、品质因数等振动特性随之变化,进而影响陀螺仪零偏稳定性[3]。目前国内硅基微机械陀螺仪零偏稳定性的较好学术研究成果可达0.4 (°)/h[4],与国际领先水平相当,但是商品化微机械陀螺仪的零偏稳定性水平却落后国外1~2个数量级。
不同陀螺仪零偏稳定性受温度的影响规律表现出各异性和复杂性,给后端补偿造成较大困难。文献[5]研究零偏稳定性校准补偿时,测量了MEMS陀螺仪在15~45 ℃的零偏漂移,校准前后零偏漂移都与温度呈负相关关系。文献[6]在研究芯片式硅微机械陀螺温度补偿方法时,进行了陀螺输出的定点恒温实验和连续变温速率实验,得出变温速率对研发的陀螺输出无明显影响的结论。文献[7]在研究宽温范围微机械陀螺温度特性及性能改善时,获得硅微机械陀螺仪高温零偏稳定性计算值高于低温、全温区零偏稳定性计算值远大于高低温恒温计算值的结论,并提出温度补偿的方法。文献[8]测试了-25~50 ℃交变温度载荷下的零偏,陀螺仪零偏在恒温段表现出相同的先上升后下降趋势,零偏在变温段未表现出线性趋势,这对后续补偿带来很大难度。文献[9]提出基于静电力补偿的改善陀螺误差温度敏感性的方法,并搭建陀螺误差温度特性测试系统,验证了方法的有效性。文献[10]为了解决零偏随温度漂移问题,提出了基于MEMS微机械陀螺仪驱动谐振频率作温度基准的零偏温度补偿方法,对零偏进行温度影响建模分析,温度补偿后零偏稳定性提升22倍。文献[11]测试了自研的硅微机械陀螺仪在-40~60 ℃条件下的零偏输出,二者基本呈负相关,经过3阶补偿后,陀螺仪零偏稳定性能控制在10.2 (°)/h以内[11]。
综上可知,陀螺仪零偏稳定性的温度影响研究一般需要开展恒温和温度循环2类温度影响实验,基于这些温度响应测试评价,探明微机械陀螺仪零偏稳定性的温度影响规律,进而开展补偿研究。鉴于我国商品化微机械陀螺仪零偏稳定性落后的技术现状,以及不同陀螺仪零偏稳定性受温度影响规律的各异性,本文将量化对比研究国内外硅基和石英基微机械陀螺仪零偏稳定性的温度响应规律,提供来自第三方的陀螺仪零偏稳定性测试数据,并分析响应规律关联的设计和制造因素,为陀螺仪零偏稳定性优化提供方向建议。
1 方法和方案
1.1 陀螺仪零偏稳定性计算方法
陀螺仪零偏稳定性计算目前主要有1σ法和阿伦方差法[12]。阿伦方差将影响零偏稳定性的白噪声、1/f噪声和温度漂移分解计算,并将1/f噪声计算结果作为零偏稳定性的衡量指标,适用于低输出率陀螺仪的长时间零偏稳定性测试评价。1σ法将上述陀螺仪零偏稳定性影响因素全部考虑,适用于较高输出率陀螺仪的零偏稳定性测试评价。所测试评价的微机械陀螺仪输出采样频率为1 Hz,因此选择1σ法开展被测微机械陀螺仪零偏稳定性温度影响测试评价。
1σ法计算零偏稳定性B的公式定义为
(1)
式中:σ为陀螺仪在统计时间内零点电压输出的标准差,mV;SF为陀螺仪的标度因数,mV·[(°)/s]-1。
本文测试的陀螺仪都是标定完成的商品化产品,σ与SF的计算已实现陀螺仪软件集成,因此基于被测陀螺仪零点输出v,计算零偏稳定性的公式简化为
B=σv×3 600
(2)
式中:σv为陀螺仪在统计时间内角速率零点输出的标准差,(°)/s。
1.2 测试方案
1.2.1 测试系统
分别选取市场售价和参数相近的硅基微机械陀螺仪和石英基微机械陀螺仪作为零偏温度稳定性测试评价对象,编号分别为Si-1、Si-2、Qz-1和Qz-2,其中Si-2为进口产品。4只陀螺仪的量程、供电要求和工作温度范围的基本参数统计在表1中。
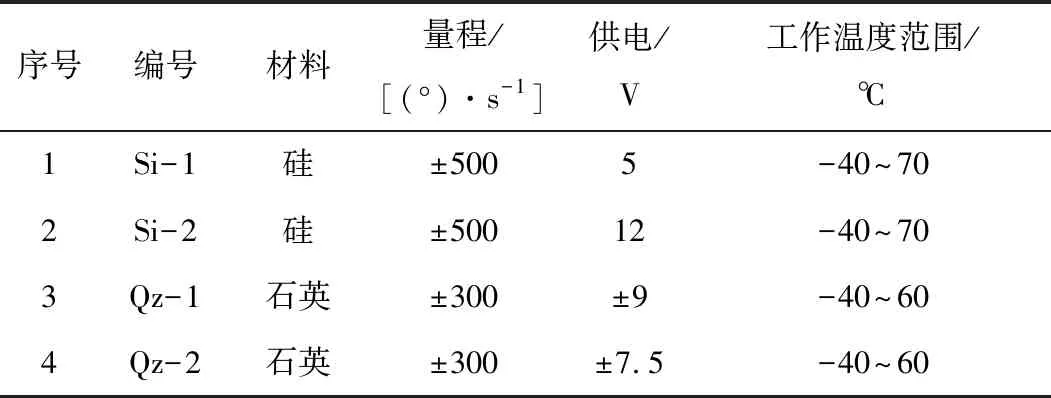
表1 4种被测试陀螺仪样机的基本参数
参照SJ 21266—2018《MEMS陀螺仪测试方法》和GJB 7952—2012《振动陀螺仪测试方法》对陀螺仪测试的环境、仪器设备等要求,设计了如图1所示的微机械陀螺仪零偏温度稳定性测试系统框图,根据系统框图搭建对比测试系统。其中,陀螺仪供电单元采用直流电源设备ZF 3003D、E36311A和IT6322A,数采单元采用KEYSIGHT 34972A和NI PXIe-1082(搭配PXI-8430/16串口采集卡),前者采集温度传感器输出数据,后者采集4只陀螺仪输出数据;固支基座为陀螺仪测试提供稳固的平台,并且用胶水将陀螺仪固结在平台上,陀螺仪的输入轴平行于地理东西方向,此时陀螺仪输入可认为是0;陀螺仪和温度传感器Pt100依靠固支平台悬空放置于温箱ETH-408-60-CP-AR内部中央,保证陀螺仪不受温箱工作振动的干扰。
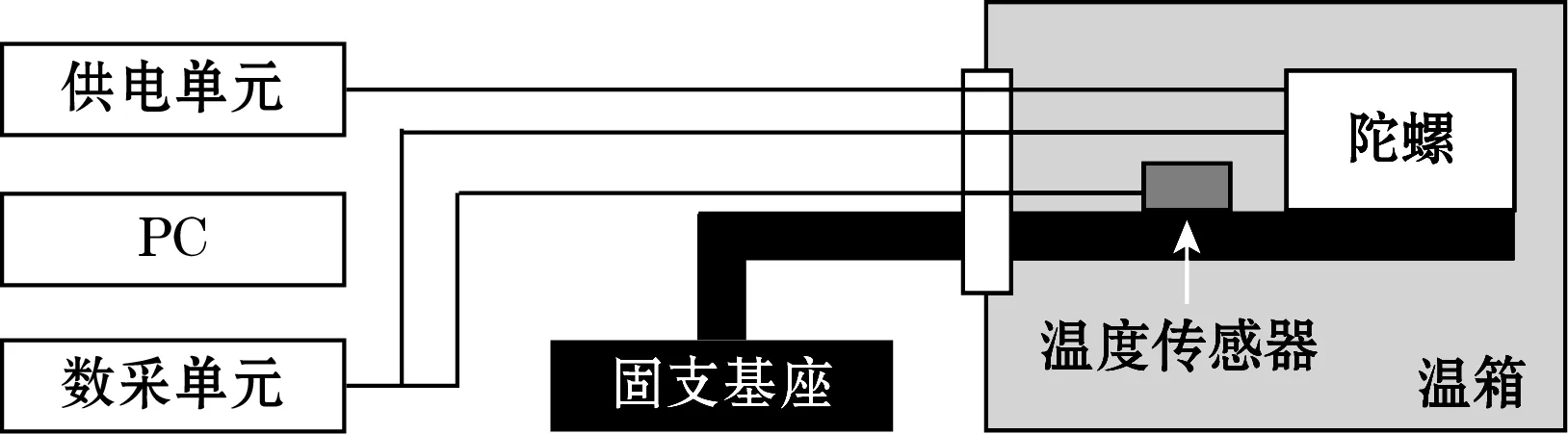
图1 测试系统框图
1.2.2 测试参数
从恒温和温度循环2类载荷考核温度对微机械陀螺仪零偏稳定性的影响。恒温贮存温度点选择4只陀螺仪工作温度上下极限和近室温温度点,即-40、60、25 ℃。Pt100温度传感器实测105s的温度记录如图2(a)~图2(c)所示,-40 ℃的实测值为(-38.3±0.20)℃,25 ℃的实测值为(25.5±0.03)℃,60 ℃的实测值为(60.25±0.10)℃。温度循环设定温度-40~60 ℃交变,Pt100温度传感器实测105s的温度记录如图2(d)所示,设定-40 ℃贮存1 h、60 ℃贮存1 h,设定升降温速率为1 ℃/min。
数采单元的数据采样频率为1 Hz,温箱和陀螺仪同步上电,同步采集温度和陀螺仪输出数据。测试结果分析时,截取恒温测试上电1 h后和温度循环2周期后的105s内的记录数据,开展分析讨论。
2 测试结果和讨论
2.1 恒温贮存影响
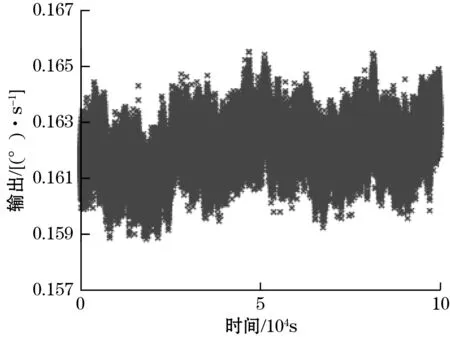
编号为Si-1的硅基微机械陀螺仪在-40、25、60 ℃贮存温度条件下的零点均值稳定在0左右,输出波动区间分别为±0.2、±0.3、±0.4 (°)/s,如图3所示。Si-1零点均值在不同温度下均保持为0的特征,反映该陀螺仪具有较好的抗正交误差设计。随着温度升高,其零点输出波动区间随之增大,一方面有可能是因为温度升高导致陀螺仪谐振机械阻尼增大,品质因子(Q值)降低,陀螺仪后端控制电路相位噪声增大,导致其零点输出幅值波动随着温度升高有所增大;其次,陀螺仪电路热噪声随着温度升高而增大也是可能的原因。
编号为Si-2的硅基微机械陀螺仪在-40、25、60 ℃贮存温度条件下的零点输出均值分别为-5.29、0.20、2.73 (°)/s,输出离散程度稳定在约1.5 (°)/s,如图4所示。零点输出离散程度稳定可能得益于陀螺仪的低通滤波电路剔除了随温度变大的热噪声以及MEMS机械阻尼噪声,因而Si-2在不同温度下零位离散度基本保持不变。随着温度升高,陀螺仪零点输出表现出较大的正相关性偏移,一方面陀螺仪结构设计上可能存在较大的驱动和检测耦合能量传递,说明该陀螺仪的抗正交性能还需要进一步优化;其次,工艺加工误差也能导致其驱动方向的振动特性存在较大对称性误差,进而在检测方向上产生与温度变化相关的能量泄漏。
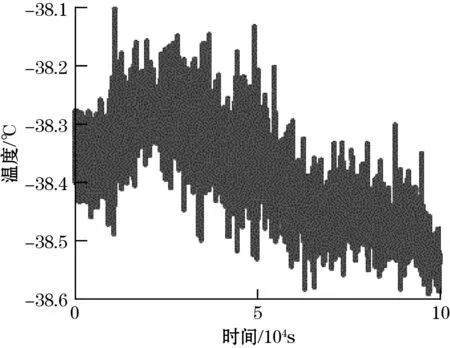
(a)-40 ℃
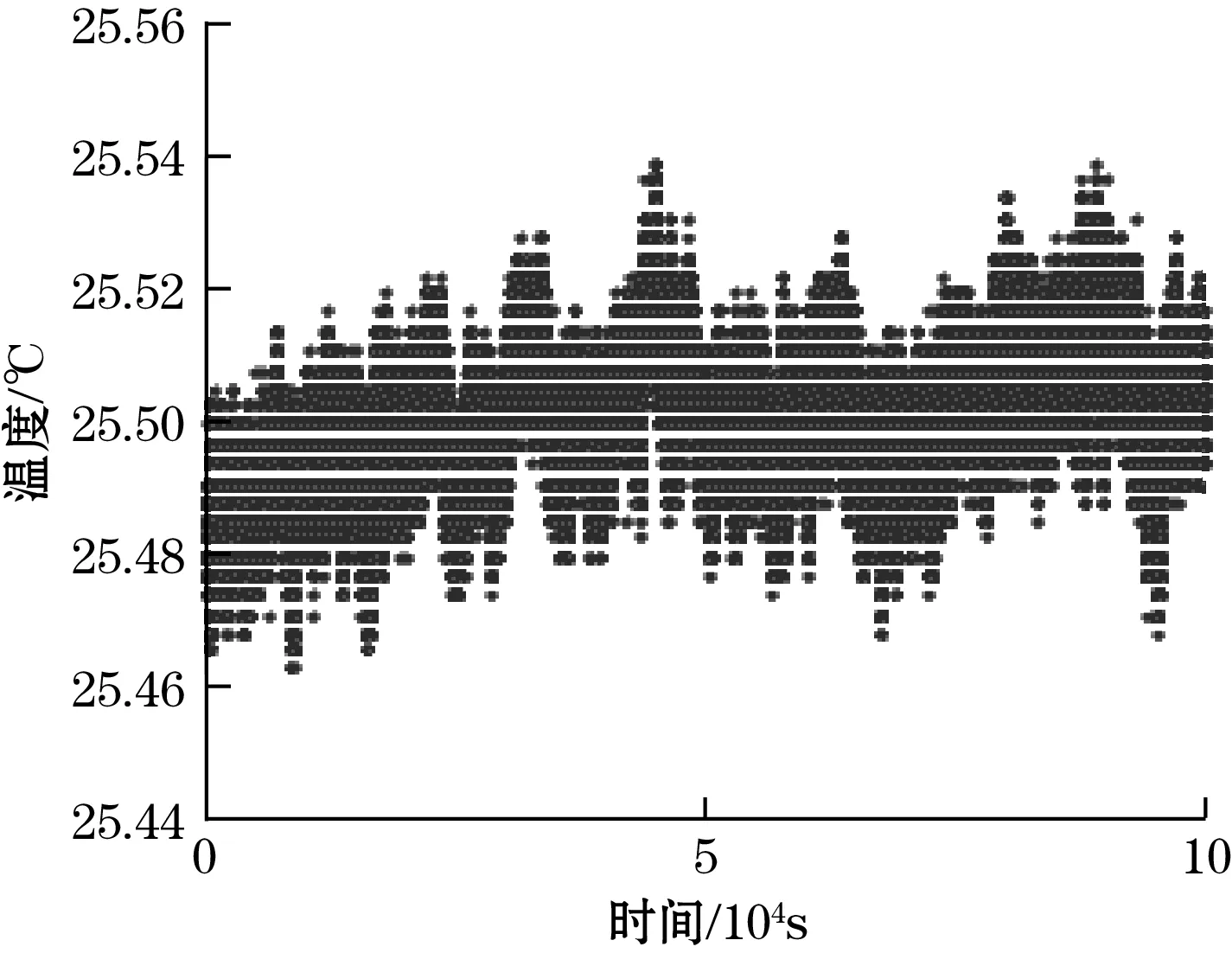
(b)25 ℃

(c)60 ℃
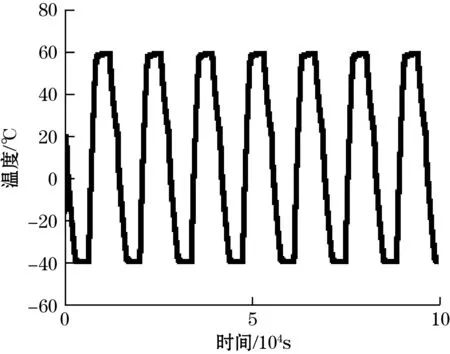
(d)-40~60 ℃交变图2 105 s内的恒温和温度循环记录
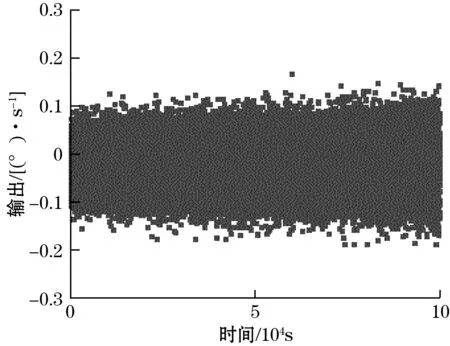
(a)-40 ℃
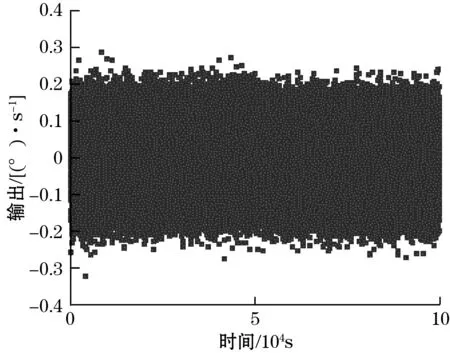
(b)25 ℃
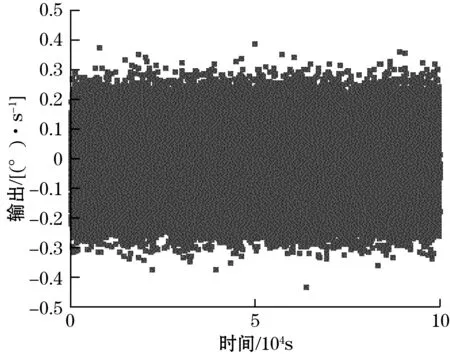
(c)60 ℃图3 Si-1陀螺仪在不同贮存温度下的105s输出记录
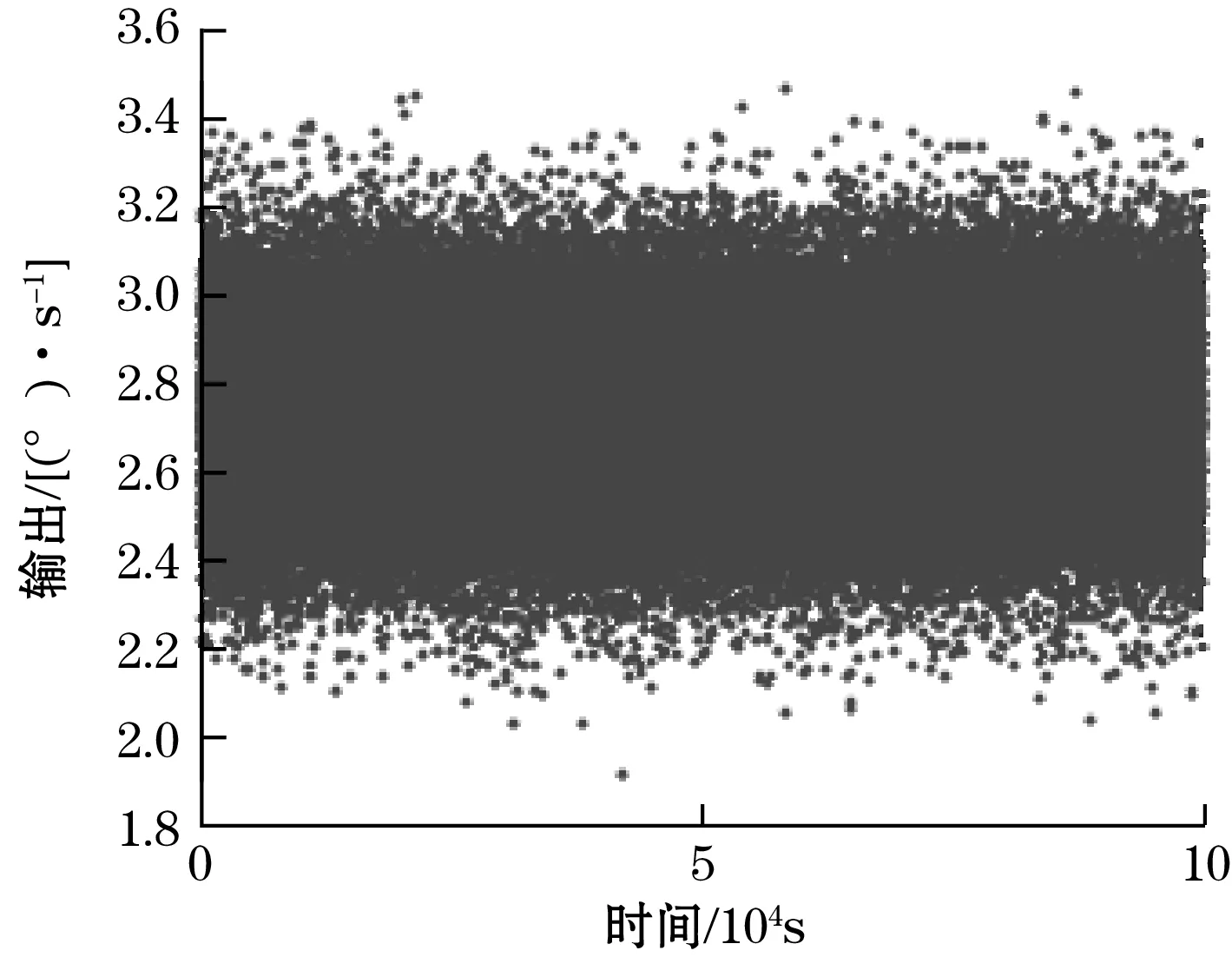
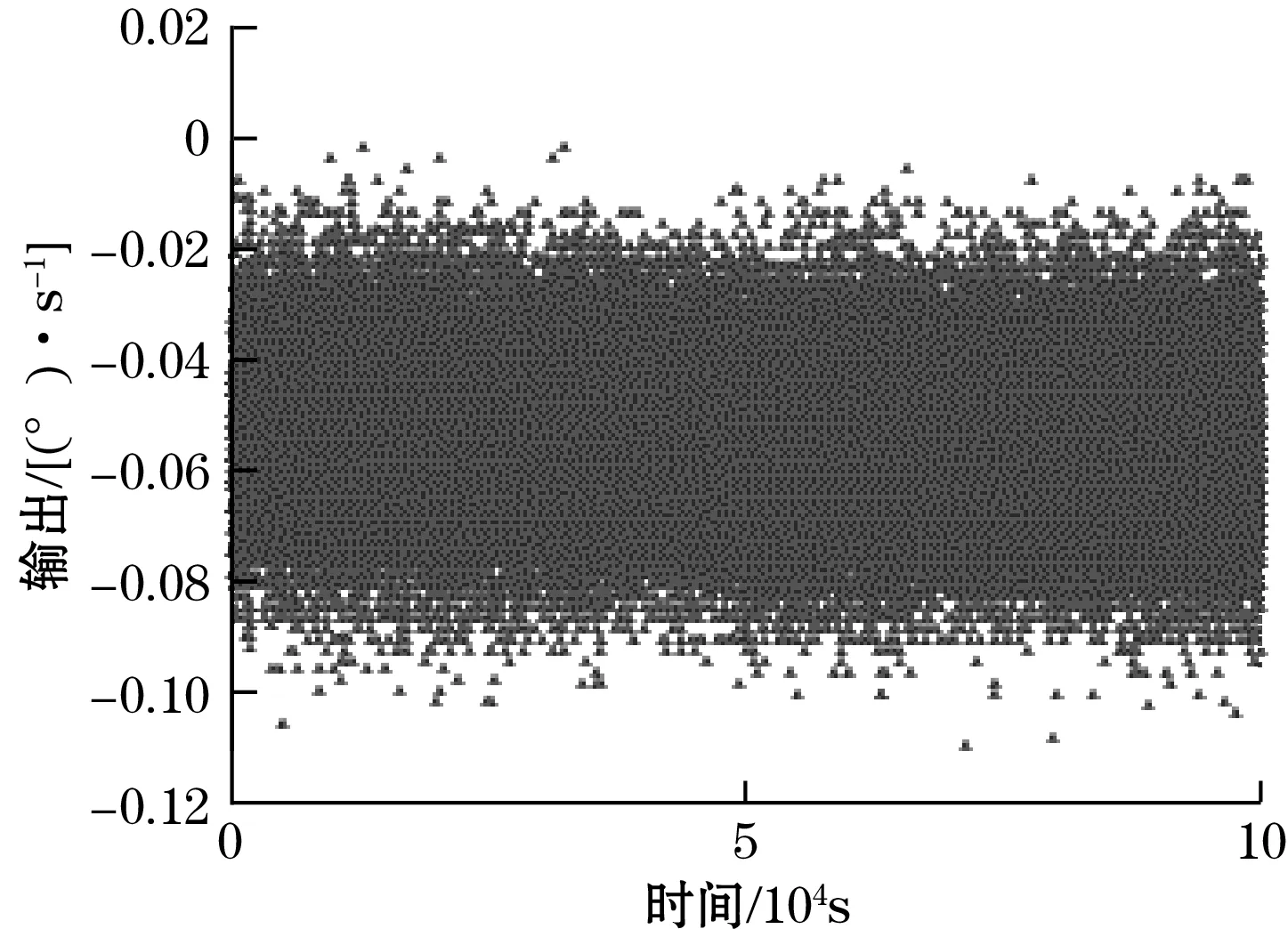
编号为Qz-1的石英基微机械陀螺仪在-40、25、60 ℃贮存温度条件下的零点输出均值和波动区间分别为(-0.054±0.050)(°)/s、(-0.020±0.025)(°)/s、(-0.023±0.030)(°)/s,如图5所示。该陀螺仪输出均值和波动区间都相对较小,说明该石英陀螺仪在结构设计和制造工艺上较硅基陀螺仪有较好的控制特性,这可能与石英基陀螺仪相对简单的振动结构和小尺寸晶圆级高一致性制造工艺有关。但其零点输出均值和波动的温度特性表现出了非线性,这可能与陀螺仪封装的结构刚度、残余应力和粘接胶水等有关,多材料、多结构等复杂封装特征存在多参数耦合的温度特性变化。

(a)-40 ℃

(b)25 ℃
(c)60 ℃图4 Si-2陀螺仪在不同贮存温度下的105 s输出记录
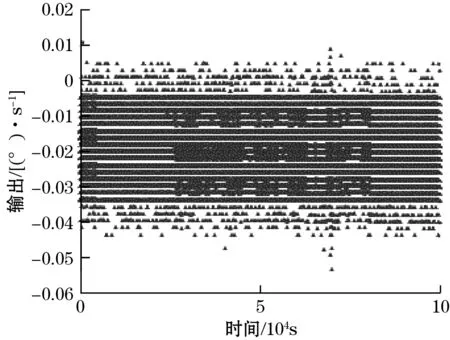
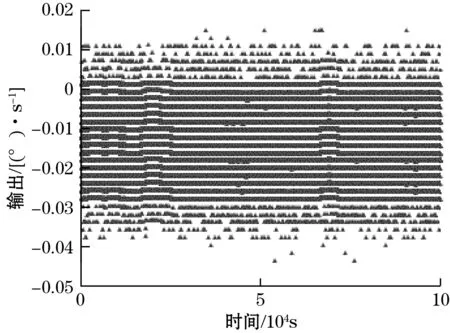
编号为Qz-2的石英基微机械陀螺仪在在-40、25、60 ℃贮存温度条件下的零点输出离散程度稳定在0.01 (°)/s左右,零点输出均值分别为0.18、0.03、0.10 (°)/s,如图6所示。该陀螺仪的零点均值表现出与其他3只陀螺仪相反的热失配温度特性,说明该陀螺仪的封装结构、工艺和材料可能存在更复杂的不确定性,例如粘接胶水固化特性未得到较好控制、封装残余应力未有效消除等,可从加强后道老化试验进行改善。
(a)-40 ℃
(b)25 ℃
(c)60 ℃图5 Qz-1陀螺仪在不同贮存温度下的105s输出记录
2.2 高低温变影响
4只陀螺仪由温度变化引起的输出热迟滞都表现出周期性,但是各有不同,如图7所示。Si-1、Si-2和Qz-1的零点输出在温度上升和下降阶段都分别随之表现出上升和下降的趋势,与恒温贮存载荷下的温度特性基本一致。Qz-2的零点输出在温度上升阶段呈现上升的趋势,在温度下降阶段呈现先降低后升高的变化,结合前述,也进一步说明了Qz-2陀螺仪在封装胶水特性或封装残余应力等热失配方面需要进一步优化。
硅基陀螺仪Si-1、Si-2的零点输出变化拐点相比温度变化拐点略有迟滞,而石英基陀螺仪Qz-1、Qz-2几乎没有迟滞。这主要是由于石英基陀螺仪采用金属管壳封装传感结构,封装结构与传感结构间的热阻较小;而硅基陀螺仪的传感结构采用热阻相对较大的圆片级真空封装,因此石英陀螺的温度迟滞相对较小。
2.3 零点输出稳定性对比分析
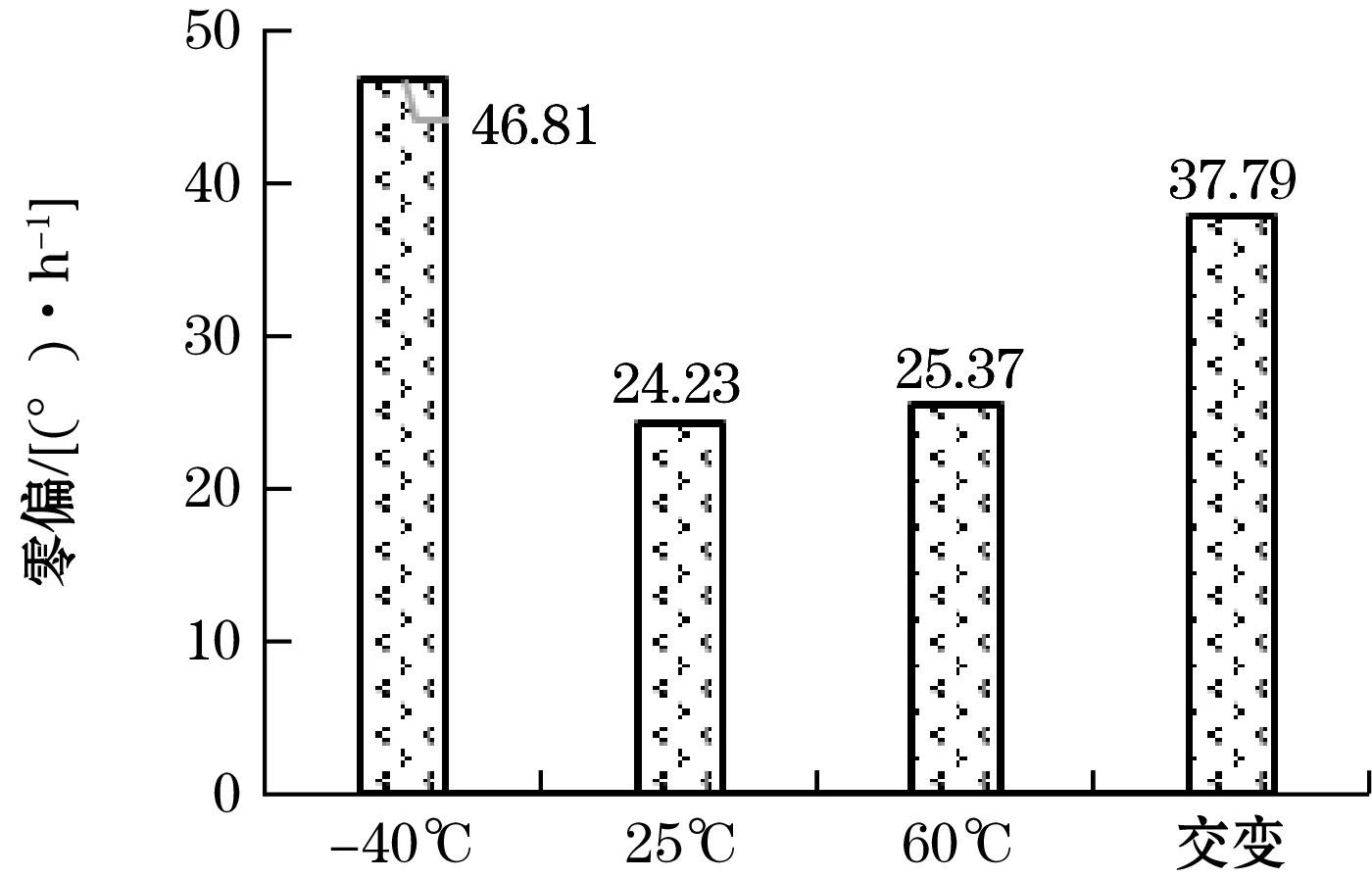
将4只陀螺仪在不同贮存温度和温度循环变化条件下的零偏稳定性值统计在图8中。总体来看,零偏稳定性最优的陀螺仪是Qz-1,最差的是Si-2;石英基陀螺仪的零偏稳定性比硅基陀螺仪更优;交变温度载荷更容易影响Si-2和Qz-2的零偏计算结果,Si-2在交变温度载荷下的零偏值是恒温贮存载荷下的零偏值的20倍左右,Qz-2在交变温度载荷下的零偏值是恒温贮存载荷下的零偏值的50倍左右,其中,Si-2在交变温度载荷下的零偏值更大的原因是陀螺仪随温度变化的输出波动范围很大,约为-5~3 (°)/s。

(a)-40 ℃

(b)25 ℃
(c)60 ℃图6 Qz-2陀螺仪在不同贮存温度下的105s输出记录
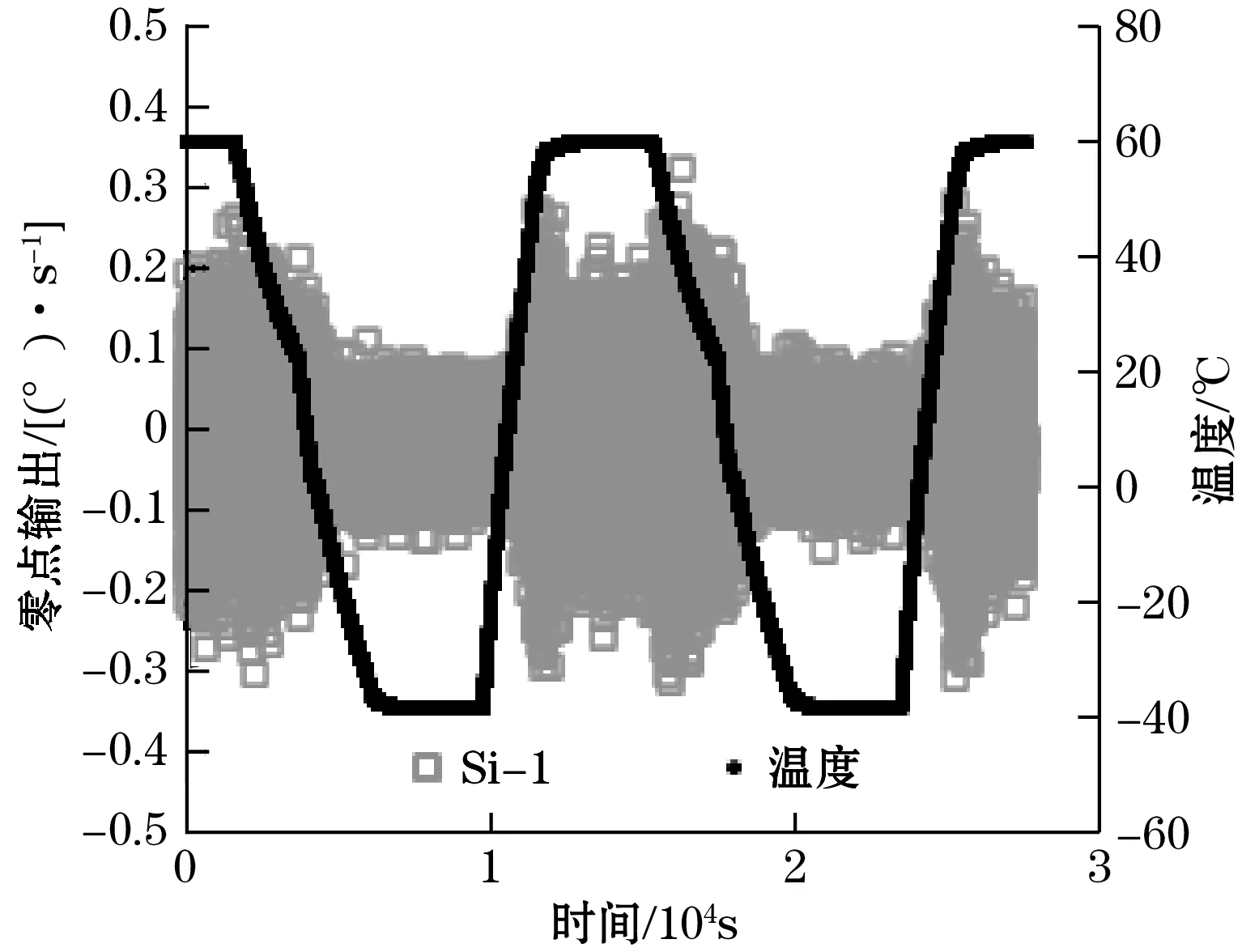
(a)Si-1
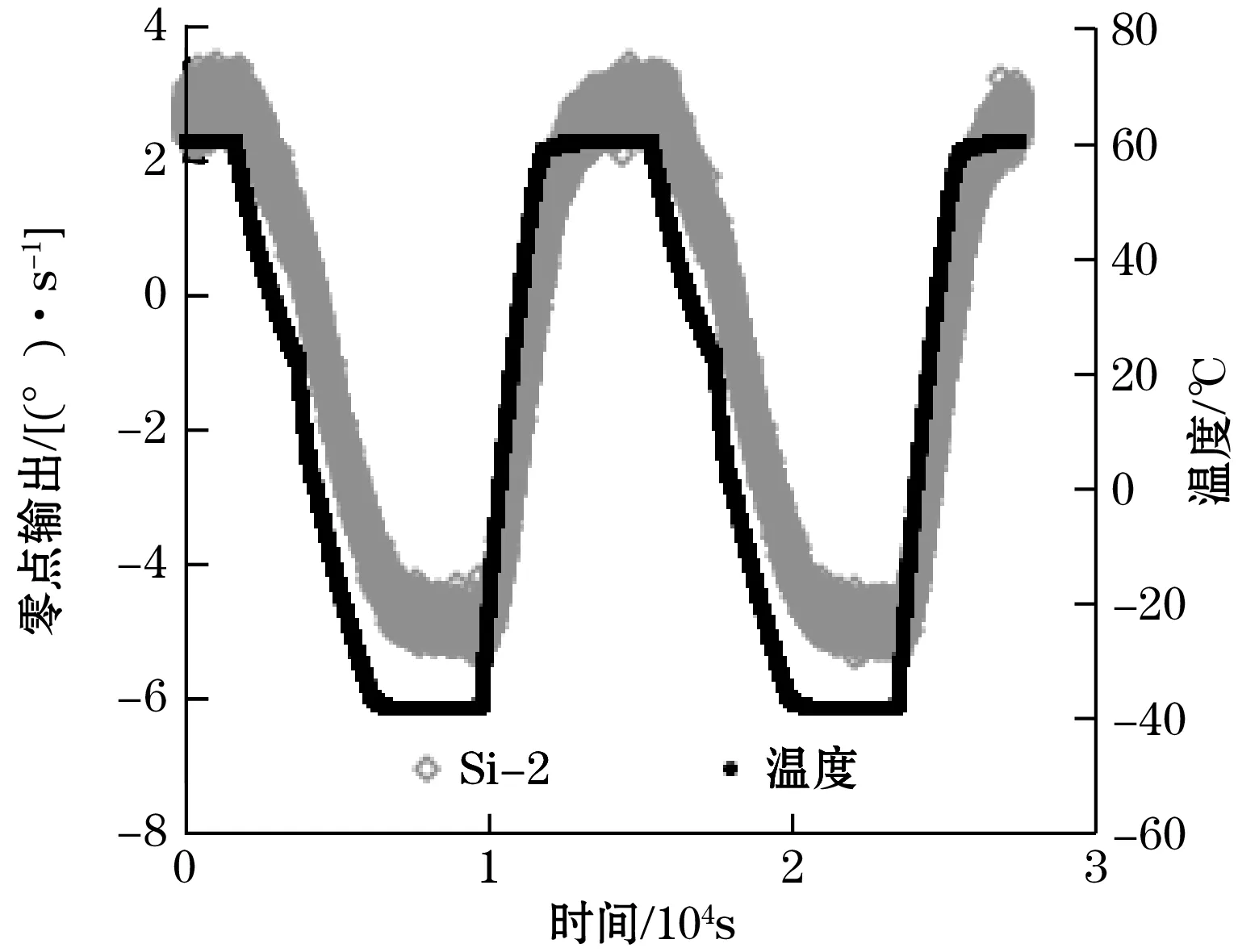
(b)Si-2

(c)Qz-1

(d)Qz-2图7 4只陀螺仪在-40~60 ℃温度交变载荷下的零点输出记录

(a)Si-1
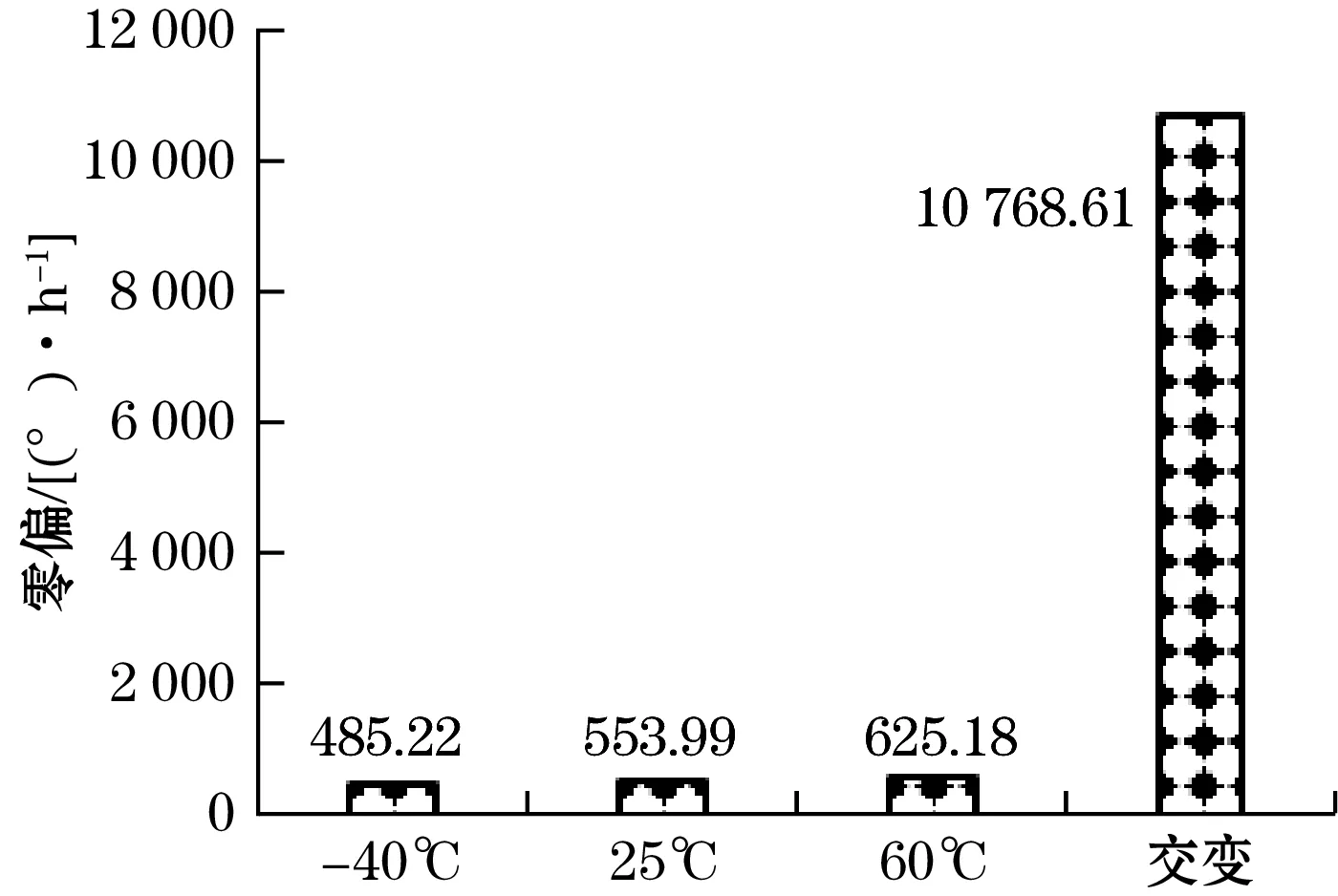
(b)Si-2
(c)Qz-1
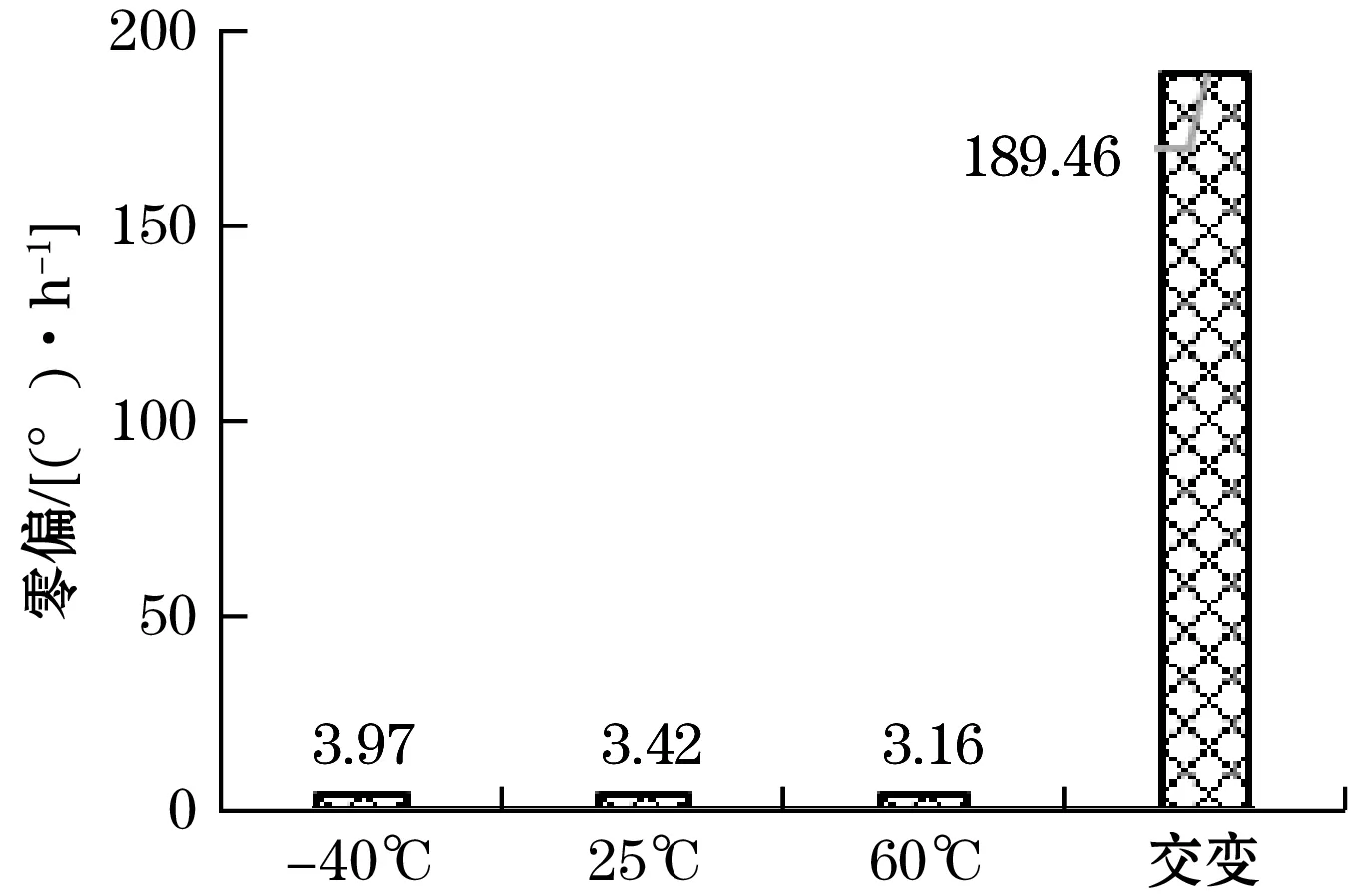
(d)Qz-2图8 4只陀螺仪在-40 、25、60、-40~60 ℃交变4类温度载荷下的零偏计算结果统计
3 结束语
本文对比测试了硅基微机械陀螺仪和石英基微机械陀螺仪在恒温贮存和温度交变载荷下的零点输出特性,并分别计算出对应的零偏稳定性值。恒温载荷下,石英基微机械陀螺仪零偏稳定性计算值在40 (°)/h以下,硅基微机械陀螺仪零偏稳定性计算值约在150 ~670 (°)/h的大范围之内,石英基陀螺仪零偏性能整体优于硅基陀螺仪;硅基陀螺仪的零偏稳定性计算值与温度基本呈正相关趋势,石英基陀螺仪与之相反;交变的环境温度对硅基和石英基陀螺仪零偏稳定性都会产生较大影响(Si-2和Qz-2),但是通过更好的结构设计、工艺和封装实现,也能避免这种影响(Si-1和Qz-1)。分析了不同陀螺仪零点输出特性对不同温度载荷的响应规律,从结构设计、制造工艺和封装方式等方面提出性能优化的建议。
