棱镜式激光陀螺变温实验中多横模干涉研究
2022-07-27郭兰朋刘健宁翁浚王超张玉书谢钦彭云丽
郭兰朋,刘健宁,翁浚,王超,张玉书,谢钦,彭云丽
(西安理工大学 机械与精密仪器工程学院,西安 710048)
0 引言
激光陀螺提取环形谐振腔内反向行波的合光干涉信息,根据干涉条纹的移动数目和方向,对各种非互易效应,如转动角速度的感测具有极高的灵敏度[1-3]。棱镜式激光陀螺(Total Reflection Prism Laser Gyro,TRPLG)利用全反射棱镜(Total Reflection Prism,TRP)构成环形谐振腔,具有背向散射小、损耗低等优点[4-6]。但是,由于光在TPR 中通过的路径较长,TRP 材料熔融石英的折射率在不同温度下发生变化,因此,在温度剧烈变化的条件下,这种陀螺的光路在子午面内将产生定向移动[7]。TRPLG 依靠合光棱镜和外光阑组合,通过损耗控制实现对环形激光器横模振荡状态的限制[8]。因此,合光棱镜、外光阑系统的设计和装配,与激光陀螺限模的稳定性密切相关,直接影响着陀螺的精度和工作稳定性[9-10]。在工程实际中,由于环形谐振腔TRP 加工、装配存在误差,腔体及TRP 存在塔差,不合理的调腔等因素,导致变温实验中,陀螺实际光路在子午面和弧矢面内均可能偏离理想位置,造成腔内限模结构发生变化,限模光阑对高阶横模的限制效果降低,高阶横模混合基模同时起振,合光质量变差,由此引发陀螺精度下降甚至故障。
本文根据棱镜式环形谐振腔的光学特点,采取激光模式理论对不同阶次高阶横模的干涉光斑进行研究。实验利用猫眼激光器产生不同阶次的高阶横模干涉光场,在此基础上,研究了激光陀螺不同阶次横模干涉光斑的形貌特征。结合分析变温条件下棱镜式环形谐振腔光路移动特性,对实际变温实验中发生的激光陀螺精度测试异常时,合光光斑紊乱的机理进行研究。该研究对TRPLG 变温故障原因分析、针对性返修具有指导意义。
1 棱镜式激光陀螺
1.1 TRPLG 环形谐振腔
TRPLG 环形谐振腔结构如图1所示。环形谐振腔通过四块TRP 构成环形光路,TRP 根据结构区别分成两类,其中,TRP-1 所有表面均为平面,TRP-2 小直角面为球面,目的是保证变温情况下谐振腔的稳定性。一块TRP-2 表面镀制透射率约为80×10-6~100×10-6的膜层,目的是在保持环形激光器低损耗工作的前提下,耦合部分光能量用于探测。该TRP 大斜面贴合合光棱镜,合光棱镜将环形腔内顺、逆时针运转的部分光能量耦合出腔外,并将两束光能量合成,形成稳定的干涉光斑。干涉光斑的暗条纹间距为Δx=λ/2θ,其中,λ为环形激光器工作波长,θ为合光角度的一半。合光棱镜的结构和工作原理如图2所示。
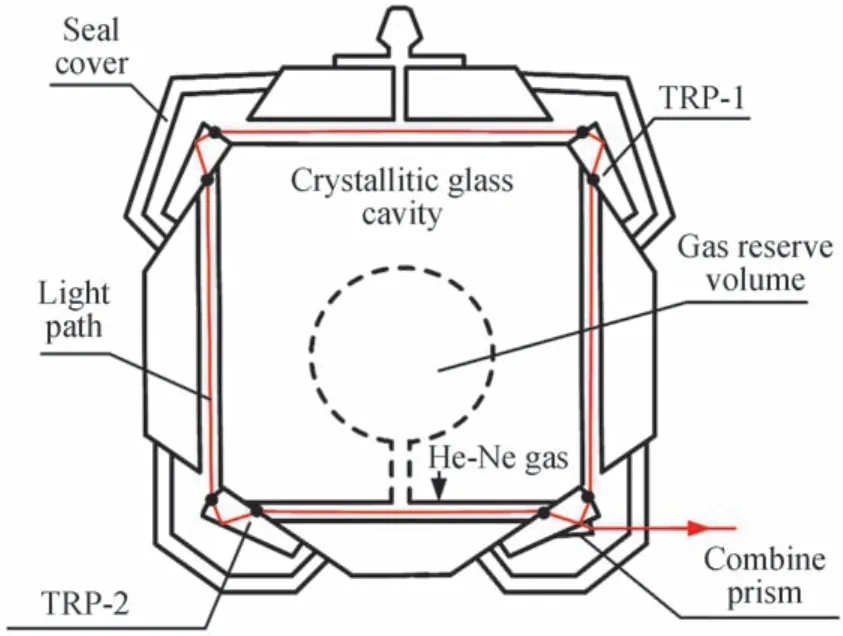
图1 TRPLG 环形谐振腔结构示意图Fig.1 Schematic diagram of TRPLG ring cavity

图2 合光棱镜结构及工作原理示意图Fig.2 Schematic diagram of combining prism
需要特别指出的是,合光棱镜一般仅镀制一层增透膜,增透膜的透过率需要保证顺时针方向传输光束和经历反射过程的逆时针方向传输光束,在合光位置处能量大致相等。
1.2 TRPLG 测速方式与变温故障
合光棱镜耦合出的干涉条纹通过光窗间距为∆x/4 的双光窗光电探测器进行光电转化,实现信号的采集[11]。在外界输入角速度影响顺、逆时针光束的相位差,进而造成干涉条纹发生定向移动时,双光窗光电探测器将获得相位差为π/2 的正、余弦信号。通过测量单位时间内正、余弦信号的移动数目和方向,可以解算出外界输入角速度的相关信息[12-13]。理想情况下,合光棱镜处形成的干涉条纹为边缘清晰的基模干涉条纹,经光电探测器转换为规则的正、余弦信号,再将它们处理成方波信号进行计数[14];若干涉条纹发生畸化,亮暗对比度变差,光电探测器采集数据出现异常,表现为陀螺精度下降甚至发生功能性故障。
图3为TRPLG 变温测试精度曲线正常数据和故障数据对比图。将激光陀螺置于温箱中进行变温测试,温箱温度按照1 ˚C/min 的变化速率,从−40 ˚C 至70 ˚C 连续变温,变温测试总时长2 h。测试过程中,激光陀螺通过检测地球自转角速度的天向分量,根据测试数据的稳定性即激光陀螺的零偏稳定性,表示精度。测量过程中激光陀螺以百秒为时间单位记录通过探测器双光窗表面的条纹数,并输出一个数据点。图3中N为测量地球自转角速度的天向分量的数据曲线;Uhfo为陀螺稳光强控制回路的电压曲线,该曲线反复波动并且逐渐升高,反映出激光陀螺在变温测试过程中反复经历跳模控制,并且高温段工作纵模的损耗高于低温段工作纵模。Uwarm为陀螺稳频控制电压曲线,反复波动是跳模控制造成的。图3(a)中N为正常陀螺的测试精度曲线。2 小时内陀螺共输出72 个测试点,N曲线在2 小时内基本保持常数值742,即地球自转角速度为匀速,测试精度优于0.01 ˚/h。图3(b)为故障曲线。这类故障陀螺一般在温度变化进展一段时间后,精度曲线N出现异常。如果连续测试,过程中精度曲线表现出断续正常和异常反复出现的状态。这类陀螺故障与温度的剧烈变化密切相关,此外,故障点处光电探测器精度计数呈现出条纹数激增,而不出现条纹计数减少或者丢失。这类故障一般非常严重,表现为陀螺失去测速功能,而不是精度降低等一般性测试性能下降。对这类故障的研究,需要借助环形激光谐振腔模式理论分析。

图3 TRPLG 变温测试精度曲线正常数据和故障数据对比Fig.3 Normal and abnormal data of TRPLG variable-temperature experiments
1.3 横模阶次与合光干涉
环形谐振腔内振荡的两列反向传输光波的自再现模可以用厄米—高斯函数表达振幅随位置坐标的变化关系。假定顺、逆时针传输的两列光波的振幅相等,可以表示为

式中,Cmn为常数;f为谐振腔共焦参数;ω(z)=为与传播轴相交于z点的高斯光束等相位面上的光斑半径;m,n的取值代表了谐振腔内振荡横模的阶次;Hm(x)为m阶厄米多项式,可以表示为

顺、逆时针传输的光束经由合光棱镜合光,将产生合光角为2θ的干涉光斑。干涉光斑的强度分布表示为

式中,E+(x,y,z)、E-(x,y,z)分别表示顺、逆时针传输的两列行波的电场强度,其振幅分别为E0+、E0-;τ为时间常数;两列行波的位相分别为ϕ+=2πν+t-k+r,ϕ-=2πν-t-k-r,k为波矢;r为行波传输位置的空间矢量;ν为光波频率。根据两列振荡光波的偏振态相同,振幅相近,可以近似E0+=E0-=E0,有

将ϕ+,ϕ˗代入式(4)中得

式中,Δν=ν+–ν˗,表示顺、逆时针传输光波的频率差,它正比于输入转动角速度Ω;θ为合光角度,合光角度示意图见图4。考虑到光电探测器的响应时间远小于1/Δν[15],当外界输入角速度为0 时,即Δν=0 时,有
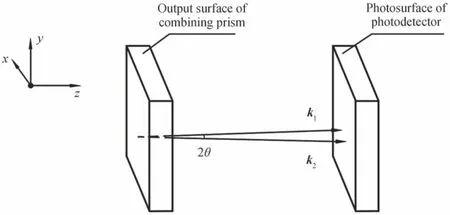
图4 合光角度示意图Fig.4 Angle of light combination

根据式(6),当外界无转动角速度输入时,环形激光器合光光斑为沿着x方向稳定不移动的等间距干涉条纹。
2 数值仿真与实验
2.1 合光光斑形貌
将不同阶次横模的复振幅代入双光束干涉式(6)中,得到各阶横模干涉光场的分布函数,仿真计算结果如图5所示。图5(a)为TEM00基模干涉光场分布仿真图。可见,两束理想的基模光束,在合光角度为2"的条件下,形成边缘清晰的明、暗条纹。干涉条纹呈现等间距分布,适合作为激光陀螺干涉测量的信号源。图5(b)为TEM11模干涉光场分布仿真图,其中干涉条纹两侧边缘清晰规则,光场中央处干涉条纹亮暗对比度不强,若作为陀螺数据采集信号源,光斑边缘清晰度降低将不利于光电探测器采集信号。图5(c)为TEM22模干涉光场分布仿真图,TEM22模合光光斑能量分散,条纹亮暗对比度差,部分条纹发生畸化、混叠不清,无法作为陀螺的测量信号源使用。实际应用中,根据激光原理可知:球面稳定腔基模损耗最小。因此,TRPLG 高阶横模起振,往往是多个高阶横模与基模同时起振,干涉光斑是多横模各自振荡并相互耦合的干涉光斑,光场结构复杂,干涉条纹的边界难以分辨,甚至完全消失。所以,激光陀螺横模限制失效后,激光陀螺将出现精度变差,甚至完全丧失测量功能。接下来,我们利用猫眼谐振腔实验验证高阶横模干涉光斑的能量分布。
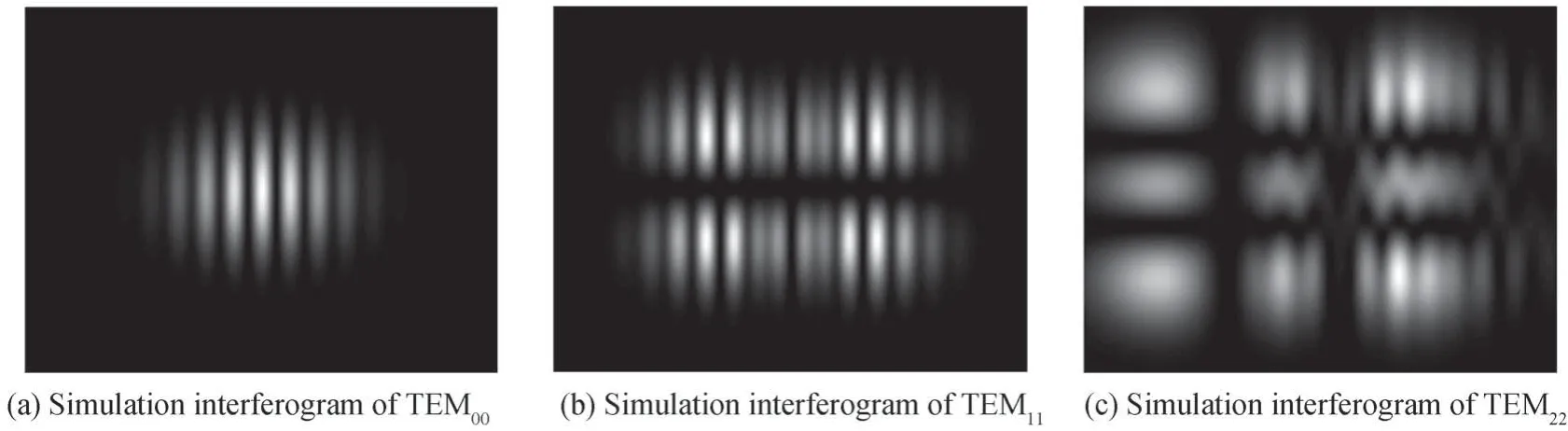
图5 各阶横模干涉仿真图Fig.5 Simulation interferograms of the different transverse modes
2.2 横模干涉实验
猫眼谐振腔的核心是猫眼逆向器,其结构如图6所示。猫眼逆向器仿生猫科动物眼睛的特殊结构,可以在一定角度范围内,实现入射光沿原路返回[16]。猫眼逆向器利用凸透镜和凹面镜的组合代替平面反射镜,并通过调节凸透镜和凹面镜之间的距离[17],可以实现不同阶次横模的输出。因此,利用猫眼逆向器可以选择振荡横模的阶次,并获得高阶横模单独起振的状态。再利用干涉装置模拟环形腔内不同阶次横模的干涉,研究其对合光光斑形貌特征的影响,实验装置如图7所示。
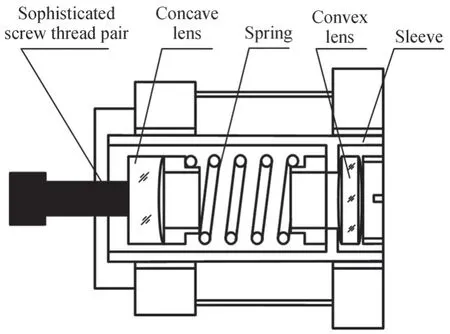
图6 猫眼逆向器结构图Fig.6 Schematic diagram of cat's eye reverse device
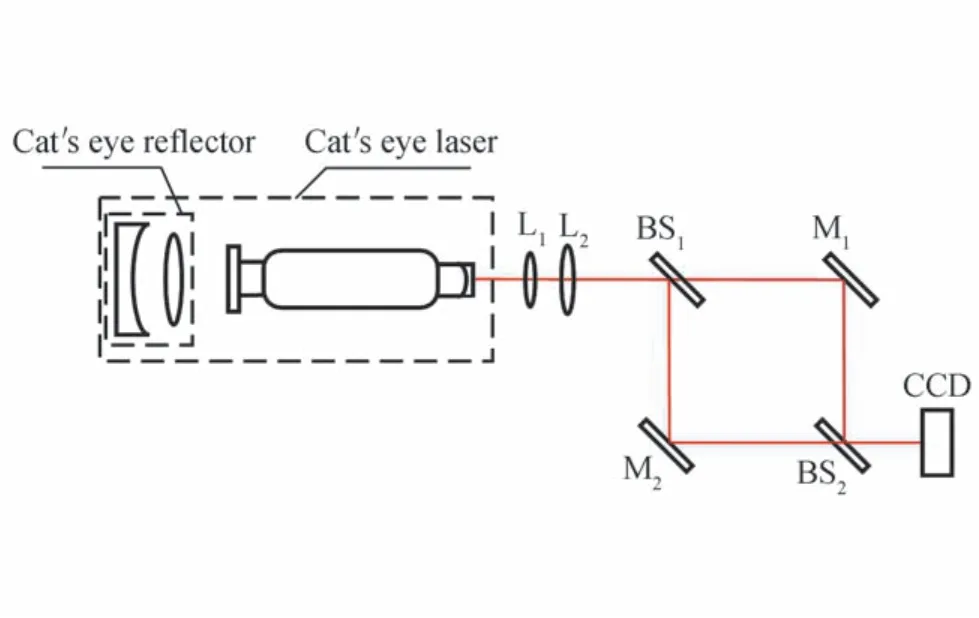
图7 实验装置Fig.7 Schematic diagram of experimental system
猫眼谐振腔通过调节猫眼逆向器的精密螺纹副,可以单独获得不同阶次的高阶横模输出。将输出的光束经由透镜L1、L2整形,入射分光镜BS1进行分光,分光后的光束经过反射镜各自反射后,在BS2处合光形成干涉条纹,干涉条纹经过后置的CCD 进行采集并记录。高阶横模光斑及干涉光斑如图8所示。

图8 不同阶次横模合光光斑CCD 实测图Fig.8 Interference spot of the different transverse modes detected by CCD
图8(a)、(b)、(c)分别为以猫眼谐振腔为核心的激光器输出的TEM00、TEM11、TEM22模光斑。图8(d)为实测基模干涉光斑图样,干涉条纹清晰,亮暗对比度强,与仿真结果符合得很好;图8(e)为TEM11模干涉光斑图,该图条纹比较清晰,其干涉图样中心条纹较为规则,但两端干涉条纹由于其模式能量分布比较分散,光斑呈现不完整状态。与图8(e)相比,实际干涉引起的条纹分布在整个TEM11模的横截面上,而仿真所得到的干涉条纹仅出现在横模能量较强的区域,其原因在于受到实际合光干涉条件的限制,仿真结果与实际实验的合光角度存在较大差别,但是这并不影响本文的研究结果。图8(f)为TEM22模干涉光斑图样,从图中可以看到干涉条纹歧化,条纹混叠不清,说明当高阶横模干涉时,干涉条纹的质量变差,导致光电探测器计数困难,测量精度下降,实验结果与仿真分析符合得很好。
2.3 TRPLG 变温测试实验
选取变温测试过程存在故障的TRPLG,将其置入温箱中,按照1 ˚C/min 的速率由25 ˚C 向70 ˚C 进行变温,当温度达到70 ˚C 后保持稳定。在此状态下,TRPLG 检测地球自转角速度的天向分量,检测结果如图3(b)所示。同时,利用端面连接自聚焦透镜的光纤将合光光斑引出温箱,输出光斑经由CCD 实时采集,结果如图9所示。需要指出的是,合光光斑中长尾迹是TRPLG 外光阑衍射造成的。在陀螺精度计数正常的状态下,如图3(b)中前800 s 测试曲线所示,此时,TRPLG 合光光斑如图9(a)所示,其中央处有边缘清晰的暗条纹,满足光电探测器计数要求。当温度逐步上升,并经由微晶玻璃传导入环形谐振腔内部,显著影响谐振腔光路附近的温度梯度时,陀螺合光光斑中央的暗条纹消失,如图9(b)所示。该图样与高阶横模起振后,环形激光器合光光斑形貌分析结果相似。在此状态下,光电探测器对形貌发生畸变的、边界混叠的明、暗起伏变化进行采集并产生误判。因此,TRPLG 变温实验精度异常故障一般呈现出单位时间内条纹数大幅度增加的现象,测试结果如图3(b)后半段测试曲线所示。整个测量过程中,陀螺精度可能短暂恢复正常,但在温度变化最剧烈的时间段,陀螺精度曲线“跳数”故障明显。接下来,我们进一步分析环形谐振腔在变温实验过程中高阶横模起振与合光光斑畸化的原因。

图9 激光陀螺合光光斑CCD 实测图Fig.9 Interference spots of TRPLG detected by CCD
3 故障分析
对于棱镜式环形谐振腔,利用光束传输矩阵复算,可以证明其光学路径在腔体温度升高或降低过程中,存在如图10所示的光路移动特征。即:温度变化时,子午面内,TRPLG 振荡光束在TRP-2 处基本保持稳定,在TRP-1 处存在光路定向微位移。高温段TRPLG 光路微位移如图10(a)所示,与常温光路相比,光束在TRP-1 附近存在外扩现象。低温段TRPLG 光路微位移如图10(b)所示,与常温光路相比,光束在TRP-1附近存在内收现象。

图10 高、低温下光路偏移理想路径示意图Fig.10 Offset of the ideal light path at high and low temperature
对于TRPLG,通过一套贴片外光阑控制损耗,实现对振荡横模的限制。贴片外光阑之一的结构如图11(a)所示,使用厚度为1.5 mm 的熔融石英作为光阑材料,光阑的工作棱边加工为弧面。对于TRPLG,一般将光阑光胶装配在腔体通光孔径的外沿,装配时使弧形工作棱边遮挡部分通光区域,外光阑之一的装配位置如图11(b)所示。考虑到腔体、棱镜的加工一般符合图纸要求,忽略腔体、棱镜塔差和角度误差的影响,外光阑的工作棱一般装配在与子午面平行的通光孔径上侧,如图11(c)所示。外光阑控制损耗的程度根据光阑装配前、后激光器阈值电压的变化量确定[18]。在此状态下,利用不同阶次的横模在光阑处衍射损耗的差异来抑制高阶横模,保证基模振荡。

图11 光阑结构及返修方案示意图Fig.11 Schematic diagram of the aperture structure and repair method
当谐振腔腔体或者棱镜加工存在塔差,造成光路在弧矢面内移动,引发光路轻微非共面;TRP 角度加工误差,造成光路在子午面内移动量增加;外光阑损耗控制失当,装配位置不恰当等均可能造成光路移动后,谐振腔多横模同时振荡。在多模振荡状态下,干涉光场能量分布紊乱,造成光电探测器识别谬误,激光陀螺失效。针对这类故障,最有效的返修方式是根据光路移动方向,针对性的返修外光阑。例如,某TRPLG 变温故障发生在25 ˚C~70 ˚C 的升温过程中,结合棱镜式环形激光器高温状态下光路移动方向分析,预计光路产生如图11(d)所示的弧矢面倾斜微位移。制定返修方案时,可以将旧的单一外光阑改为斜45˚双侧外光阑,如图11(d)所示。两块新光阑遮光程度较旧的单一光阑适当减小,常温状态下,维持限模状态不变。通常情况下,变温测试精度异常的谐振腔采取上述针对性返修后,除去极个别因为棱镜残余应力和光路移动量过大造成故障的谐振腔外,大部分腔体的故障均可以得到彻底解决。
4 结论
TRPLG 变温测试精度异常,一般是谐振腔光路微位移后,旧的限模结构不足以保持谐振腔基横模单独振荡工作,高阶横模混合起振造成的。利用环形激光器模式理论分析了不同阶次横模干涉的光场分布,实验利用猫眼激光器研究了不同阶次横模对合光光斑形貌特征的影响。根据实际TRPLG 变温测试中采集的合光光斑,结合变温状态下棱镜式环形谐振腔光路微位移分析发现:在环形腔存在高阶横模起振的状态下,合光光斑的干涉条纹边界模糊、混叠不清,严重影响激光陀螺的正常工作。最后,基于理论分析提出了外光阑针对性装配的返修方案。
