非定制经济型近红外干涉仪设计
2022-07-27谢澎飞范筱昕高志山冯金舟袁群
谢澎飞,范筱昕,高志山,冯金舟,袁群
(南京理工大学 电子工程与光电技术学院,南京 210094)
0 引言
干涉检测技术是当今检测光学元件面形和光学系统成像质量评价最为有效的一种光学计量测试方式之一[1]。其非接触式的测量方法无损高效、误差小、精度高,测量精度可达波长量级。伴随着干涉仪和移相干涉术的相继出现,干涉测量技术的自动化程度显著上升。
随着计算机和探测器等各方面的发展,干涉仪的测量波段从可见光拓展到了红外波段[2-3]其结构形式与可见光波段的基本相同。现有的红外干涉仪研制成品尽管存在着光路布局和设计参数的差别[4-10],但是大部分红外干涉检测装置的光路结构都采用两个探测器用于对点成像光路和干涉成像光路分别接收的光路设计方式[12-13]。这种设计方式的研制成本较高,一方面红外探测器造价昂贵,另一方面系统的光学元件都需要通过定制加工来完成。虽然目前有倒三角形的光路设计方法[14-15]实现单探测对双光路的接收,但是该方法需通过机械位移实现对点成像和干涉成像模式的切换,测量重复定位度差。为了满足近红外波段小口径光学系统的检测需要,本文设计干涉仪检测的有效口径为20 mm,以1 310 nm 的光纤光源和像元尺寸为20 μm×20 μm,靶面尺寸为12.8 mm×10.24 mm,响应波段为900~1 700 nm 的红外探测器作为硬件条件,研究合理的光路设计方法完成对点成像光路和干涉成像光路的分束与合束,从而实现两条光路共享同一探测器,并且选购光学元件货架商品。最终利用系统探测器少,全部光学元件可直接购买到成品的优点,有效降低其研制成本。
1 近红外菲索干涉仪的工作原理与设计思想
1.1 工作原理
菲索干涉系统中,激光器发出的光在经准直镜后形成平行光束,准直光束经过高精密度加工的标准镜后形成透射光束与反射光束两部分。反射光束形成参考波前,而透射光束经过待测件的反射形成测量波前。参考波前和测试波前再经过成像系统在探测器上成像发生干涉形成干涉条纹。从标准镜和待测件返回的探测光分为两束,其中一束进入对点成像光路,平行光经准直镜后会聚于毛玻璃处,并经过对点镜和成像镜在探测器上成像;另一束进入干涉成像光路,经成像镜后待测件在探测器上形成与待测件共轭的干涉图像。
1.2 总体参数选定
本干涉系统采用工作波长为1 310 nm,芯径为9 μm,数值孔径为0.14 的单波长近红外激光器作为光源。为满足检测需要,设计的干涉仪检测有效口径为20 mm。因此可以计算出准直光路的最小F数为3.54;为消除视差影响和恒定的垂轴放大率,干涉成像光路采用双远心系统。因此检测光瞳直径和探测器的有效口径决定了干涉系统的放大倍率。探测器采用有效尺寸为12.8 mm×10.24 mm,像元尺寸为20 μm×20 μm 的红外探测器。为充分利用探测器的有效尺寸,干涉成像系统放大率定为1/2。为实现对参考镜与待测件俯仰、倾斜角度的监测,指导干涉图的调整,设置对点光路视场角为±1.2°。
1.3 总体光路设计思路
根据目前1 050~1 700 nm 波段消色差透镜的情况,Thorlabs 公司在该波段商品齐全,最终设计采用AC254-XXX-C 系列作为系统的光学透镜,该系列的消色差透镜焦距包括50 mm、75 mm、100 mm、150 mm、200 mm、250 mm、300 mm 和400 mm,光学元件参数将以此为参考进行设计选择。将先根据共轭关系从准直光路到干涉成像光路再到对点成像光路的顺序依次计算各镜组的焦距与位置,然后通过分光镜和反射镜对光束进行分束与合束,实现干涉成像光路与对点成像光路共享同一探测器。
图1为准直光路结构。准直光路部分由激光器、准直镜和待测件组成。激光器位于准直镜焦平面处,光源的光线经准直镜作用在待测面形成均匀的照明。
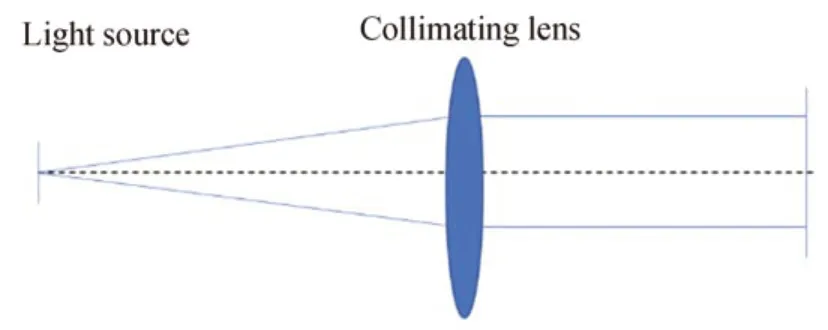
图1 准直光路Fig.1 Collimated optical path
如图2所示,干涉成像光路由待测镜、准直镜、成像镜和探测器组成。该光路采用双远心结构,所以待测件经准直镜和成像镜组成像于探测器上,同时其孔径光阑即针孔位于准直镜和成像镜组的共焦位置;准直镜的焦距由准直光路决定,成像镜焦距由光路垂轴放大率和准直镜的焦距决定。

图2 干涉成像光路Fig.2 Interferometric imaging optical path
如图3所示,对点成像光路与干涉成像光路共享成像镜,主要由毛玻璃、中继镜、成像镜组和探测器构成。由标准镜与待测件分割的参考光束和测试光束在毛玻璃上会形成两个光斑,通过中继镜和成像镜组的作用可在探测器上对两光斑成像,当两光斑重合时代表经过干涉成像光路的平行光在同一方向,从而实现在探测器上的叠加发生干涉,因此对点光路可实现干涉实验的辅助调整。对点光路具有一定的视场角,经准直镜会聚于毛玻璃处形成最大像面,该像面经中继镜成中间像,中间像再经成像镜成像于探测器上。

图3 对点成像光路Fig.3 Alignment imaging optical path
2 光路具体设计与仿真
2.1 准直光路设计
将光源置于准直镜的前焦平面处。提供的照明视场y表示为

式中,f1为准直镜的焦距,θ1为激光器的数值孔径角。其中y=10 mm,θ1=arcsin(0.14),计算可得准直镜的最小焦距为71.43 mm。根据市场现有透镜情况,保证照明视场的同时不造成过多的能量浪费,准直镜选定焦距为100 mm。对单片索雷博AC254-100-C 和由两片AC254-200-C 构成双透镜组的准直镜组进行对比考虑。
表1为准直镜为单透镜和双透镜组时无焦系统的结果对比。相比于使用单焦距100 mm 作为准直镜的方案,使用双透镜组作为准直镜的系统均方根(Root Mean Square,RMS)半径分别从三个视场的0.458 mrad、0.812 mrad 和1.059 mrad 减小到0.221 mrad、0.291 mrad 和0.349 mrad。三个视场的几何(Geometric,GEO)半径分别从0.852 mrad、2.234 mrad 和2.794 mrad 减小到了0.274 mrad、0.669 mrad 和0.856 mrad。准直效果提升显著,故系统最终采用双200 mm 消色差胶合透镜构成的双透镜组作为准直光路的准直镜。光源位于准直镜物方焦平面处,相距94.5 mm。

表1 准直镜为单透镜和双透镜组的结果对比Table 1 Comparison of the results of the system with a single lens as the collimator and that with a double lens group as the collimator
2.2 干涉成像光路设计
为消除视差影响并保证成像光路具有恒定的放大率,干涉成像光路采用双远心的设计方式,由光路几何关系可推出

式中,β为干涉成像系统倍率,f2为成像镜焦距。根据1.2 节提出的设计指标,以40 mm 作为物距,β=1/2,f1=100 mm,根据式(2)可计算出f2为50 mm。
结合市场情况,对干涉成像光路设计单组和双组两种方案:单组方案以单个焦距50 mm 的透镜(型号AC254-50-C)为成像镜;双组方案选择双100 mm(AC254-100-C)的透镜构成镜组。设置光路的孔径光阑于准直镜与成像镜的共焦位置处。
表2为两种设计方案的成像结果对比。单组方案各视场的均方根半径与几何半径都较大,由于远心光路对光路距离的限制,单胶合透镜已经无法实现对像差的有效控制。而双组方案三个视场的RMS 半径分别为1.015 μm、1.812 μm 和4.006 μm;GEO 半径分别为1.346 μm、3.394 μm 和6.904 μm。光斑全部都能控制在衍射极限以内。

表2 两种方案的点列图结果对比Table 2 Comparison of spot diagrams of the two schemes
图4、图5分别为干涉成像光路单组方案与双组方案的像质结果。经过分析,单组方案各视场的RMS 值均大于衍射极限,而双组方案可以将全视场的RMS 控制在衍射极限内,双组方案全视场的波像差RMS 值均小于0.03λ;系统最大像散从4 mm 减小到0.17 mm;最大场曲从2 mm 减小到了0.08 mm;最大畸变从1.6%减小到0.7%。图5(b)为双组方案的场曲畸变,以空间频率25 mm/lp 作为对比指标,全空间弧矢与子午方向的调制传递函数(Modulation Transfer Function,MTF)值均小于0.3;双组方案在25 mm/lp 时MTF值为0.5 左右,弧矢与子午MTF 值几乎一致。

图4 单组方案干涉成像光路像质评价Fig.4 Image quality evaluation diagram of the single lens group scheme of interferometric imaging optical path

图5 双组方案干涉成像光路像质评价Fig.5 Image quality evaluation diagram of the double lens group scheme of interferometric imaging optical path
经过各评价标准图分析,以单胶合透镜作为成像镜的方法对干涉成像系统的像差控制能力十分有限。以双胶合透镜形成镜组作为成像镜的方法能够有效控制像差。故本设计采用双组方案作为干涉成像光路。最终光路结构准直镜距离孔径光阑94.5 mm,孔径光阑距离成像镜40.2 mm,成像镜距离探测器55.6 mm。干涉成像光路结构如图6所示。

图6 干涉成像光路结构Fig.6 Optical path structure of interferometric imaging
2.3 对点成像光路设计
由总体光路结构可知,当干涉成像光路设计完成后,对点光路中像面到成像镜组后表面的距离即是定值。根据式(3)和(4)即可倒推探测器经成像镜组成像后的位置。

基于2.2 节的结果,l=55.6 mm,f'=50 mm,可推出l'=492.6 mm。由于成像镜由双100 mm(AC254-100-C)的消色差胶合透镜构成,根据实际的光学元件结构情况,成像镜组到中间像的距离为241.5 mm。
由于对点光路需要有±1.2°的视场角,因此待测镜反射回来的平行光经准直径会聚后在毛玻璃上光斑直径约为4 mm。为尽可能缩短光路结构,尽量设置毛玻璃到中继镜的距离略大于2 倍焦距,联合式(3)与式(4),算出中继镜的焦距f'为30 mm。中间像到中继镜的理论值为54.4 mm,毛玻璃到中继镜距离的理论值为66.8 mm。根据市场情况,选择索雷博AC254-30-C 作为系统的中继镜,根据实际胶合透镜的光学参数,优化毛玻璃到中继镜距离为66.8 mm,中间像到中继镜的距离为50 mm。根据式(4)可算出中继镜和成像镜组的垂轴放大率,根据实际光学结构的性质,该光路中继镜部分的垂轴放大率为0.7,成像镜组的放大率为0.27。图7为对点光路的光路结构。

图7 对点光路结构Fig.7 Optical path structure of alignment imaging
2.4 光路合束方法
先在激光器到准直镜的中心位置处放置第一分光镜,然后在待测件和准直镜之间的光路部分插入标准镜,考虑标准镜的厚度确保待测镜到准直镜的距离总和为40 mm。在准直镜与毛玻璃之间放置第二分光镜用于对点成像光路与干涉成像光路的分束,反射光经过分光镜3 和反射镜3 的反射被探测器接收;从分光镜2 透射的光线经反射镜1、反射镜2 的反射与分光镜3 的透射完成与对点成像光路的合束。最终系统分光镜均选Thorlabs 公司的BST12;第一、第二和第三45°反射镜均选用PF10-03-G01;毛玻璃选用WG11050。图8为整体光路结构,光路仿真结果如图9所示。

图8 总体光路结构Fig.8 Diagram of overall optical path

图9 近红外干涉仪光路设计Fig.9 The optical design of the near-infrared interferometer
图10为设计的实物,内置光路结构。用此仪器对一显微物镜进行了10 次波像差峰谷(Peak-to-Vally,PV)值和RMS 值检测,结果如表3所示,结果表明测量重复性小于λ/100。

表3 对一小口径显微物镜进行10 次波像差检测的结果Table 3 Results of 10 wave aberration detections performed on a small-aperture microscope objective lens

图10 干涉仪的实物Fig.10 Photo of the interferometer
3 结论
本文设计了一种对点光路和干涉成像光路共享同一探测器的菲索型近红外干涉仪,实现了全部光学元件市场化,无需定制加工,大大降低了干涉仪的研制成本,且可以在对点光路中任意位置放置挡板实现光路模式的切换。基于市场已有的光学元件,提出了先分束后合束的光路计算方法,完成了近红外干涉仪的仿真,仿真结果表明干涉仪在工作波段1 310 nm 的条件下,20 mm 口径的待测件在探测器上成像大小为9.77 mm,干涉成像光路部分各视场均能控制在衍射极限内,25 lp/mm 处MTF 值大于0.4,最大畸变小于0.5%,并且能够实现干涉仪对点光路和干涉成像光路之间的有效切换,有效降低了研制成本。对同一显微物镜进行了10 次波像差测量,测量重复性小于λ/100。
