大景深光子多普勒测速仪设计及高超试验应用
2022-07-27郝歌扬罗庆杨雅涵焉兆超吴国俊黄洁
郝歌扬,罗庆,杨雅涵,焉兆超,吴国俊,黄洁
(1 中国科学院西安光学精密机械研究所,西安 710119)
(2 中国科学院大学,北京 100049)
(3 中国空气动力学研究与发展中心超高速空气动力研究所,四川绵阳 621000)
(4 青岛海洋科学与技术试点国家实验室,山东 青岛 266200)
0 引言
光子多普勒测速仪(Photon Doppler Velocimeter,PDV)[1]是一种高精度、高时间分辨率的非接触速度测量设备,被广泛应用于爆轰[2-4]、弹道研究[5-6]、飞片试验[7]及瞬态条件下的材料力学特性[8]等高速、高冲击场景,对理解超高速运动过程具有重要意义。常规光子多普勒测速仪在使用时光学天线需紧贴被测表面,在运动方向上的探测景深较小。2012年宋宏伟等[9]利用光子多普勒测速仪测量了脉冲激光冲击铝膜时的自由表面速度,实验全程光学天线紧贴在被测铝膜正后方,无相对位移;2014年CURTIS A D 等[10]利用光子多普勒测速仪测量了激光驱动飞片的发射速度,实验中将光学天线固定在被测表面后方17.5 mm 的位置,对飞片的有效测量距离约375 μm,即测量景深375 μm;2019年MANCE J G 等[11]利用折转光路,在美国桑迪亚实验室的内爆尾管[12]上实现了对液态氙气内爆速度的测量,测试中光学天线与被测表面距离约14 mm,即系统的测量景深不大于14 mm;2020年HUTCHINSON T M 等[13]利用光子多普勒测速仪对线电流驱动下金属表面涂层的膨胀扩张速度进行测量,测试时光学天线与测试表面间的间距也仅为μm 量级。
在超高速弹道靶及二级轻气炮等超高速发射器的内弹道试验中,弹丸以火药爆轰或压缩气体等方式驱动。为了获取更高的模型飞行速度,发射器弹道的设计长度可达数米量级,因此常规光子多普勒测速仪的测量景深极难获取完整的内弹道速度历程数据。针对这一问题,本文设计了一种大景深光子多普勒测速仪,并利用该测速仪在中国空气动力与发展中心的超高速弹道靶C 上多次重复获取了超高速弹丸的速度历程数据。该技术的应用为超高速内弹道试验提供了一种高分辨率和高精度的连续速度历程测量手段,对理解超高速运动的瞬时特性、发展内弹道理论等具有重要意义。
1 系统设计
1.1 测速原理
根据激光的多普勒效应,当激光照射在运动物体表面时,其反射光所产生的多普勒频移fd与运动速度v之间存在如下关系

式中,fr表示反射光的频率,f0表示发射光的频率,λ0表示激光频率。
对于一个迈克尔逊干涉仪,若其中一束光带有多普勒频移时,其光电探测器接收到的光电流强度可以表示为[14]

式中,E0、ω0和φ0分别表示原始激光信号的复振幅、角频率和初相位,E1、ω1和φ1分别表示带有多普勒频移的激光信号的复振幅、角频率和初相位,α表示光电探测器的放大倍率。
由于光电探测器的带宽限制,式(2)中只有频率为ω1-ω0的部分能被光电探测器感应,其余部分信号均表现为直流偏置,叠加在光电探测器的输出信号上,即光电探测器输出的光电流强度可简化为

式中,A表示直流偏置强度,B表示多普勒频移所引起的光电流强度,激光角频率与频率间的关系可表示为ω=2πf。
结合式(1)和(3),当激光的输出频率稳定时,光电探测器所接收的光电流频率即为多普勒频移。因此通过数据采集卡或示波器将探测器所接收的光电流信号进行采集后,通过对信号频率的判别,即可获取被测目标的运动速度。

1.2 系统结构
本课题组所研制的PDV 系统由相干光路、光学天线(Optical antenna)和信号采集系统三部分组成,结构如图1。

图1 光子多普勒测速仪系统结构Fig.1 Structure of photon Doppler velocimeter
系统输出激光为中心波长1 550.10 nm 的窄线宽激光,线宽小于3 kHz。光纤耦合器1(1 550 nm 1×2 Fiber Optic Couplers1,Couplers1)的分光比为1∶99,将输出激光分为两束,其中99%的光信号注入光纤放大器(Erbium Doped Fiber Amplifier,EDFA),称为测量光,最高激光功率可达1.8 W。剩余1%的光信号为本地参考光,在光路中设置一个可调衰减器,用于匹配两光路的光信号强度,提高干涉信号强度。光学天线将经EDFA 放大的激光信号进行空间输出,输出光束在被测目标表面反射后,重新被光学天线接收。随后测量光经过光纤环形器(Single Mode Optic Circulators,Circulators),与本地参考光在光纤耦合器2(Couplers2)发生干涉,干涉光信号通过光电探测器(索雷博DX20AF)进行光电转换后由高速示波器(力科Wavemaster825Zi-B)进行模数转换并传输至上位机进行数据解调,测速仪主机如图2。

图2 内弹道试验使用的PDV 装置Fig.2 The PDV for internal ballistic experiment
根据现场试验要求,PDV 系统的光学天线到被测目标表面的距离约7~8 m。若将光学天线的发射光束设计为准直光束,光学天线的接收效率将近似与距离平方呈反比关系,即探测距离越远,回波能量越弱,可能导致最远距离的回波能量无法与本地参考光进行干涉。高斯光束以束腰位置为对称轴,其光斑在束腰位置前后具有较好的对称性,因此为实现较大的测量景深,将光学天线的输出激光设计为高斯光束,使发射光束在0~4 m 和4~8 m 范围内的光斑分布近似对称,以实现更大的探测景深。其中光学天线的发射口径为25 mm,实测束腰位置约为3.3~3.4 m,束腰直径约为1 245 mm,对光学天线在0~8 m 范围内输出光斑采用光束质量分析仪(索雷博BP209-IR2)进行测量,结果如图3。

图3 光学天线输出光斑测量结果Fig.3 Measurement result of output spot of optical optical antenna
1.3 系统的测量不确定度
对PDV 系统的测量不确定度采用自研标准速度生成装置进行测试,该装置的工作原理是通过伺服电机带动转盘高速转动方式生成标准线速度,通过改变电机转速模拟不同标准线速度大小。该装置由中国计量科学研究院检测标定(证书编号Lscs2019-2115),装置如图4。
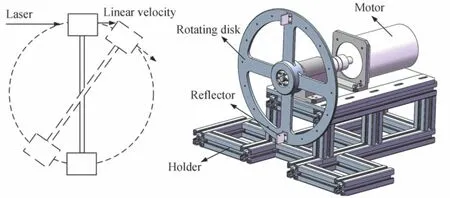
图4 PDV 系统的测量不确定度测试装置Fig.4 Test device of measuring uncertainty for PDV
由于采用该方式生成40 m/s 以上的标准线速度存在较大的安全隐患,因此对PDV 系统测量不确定度的分析主要针对1~40 m/s 速度段。该速度生成装置产生的标准线速度可以表示为

式中,n表示伺服电机转速,r表示转盘中心至转盘边缘反射镜的垂直距离。
为减小实验误差,测量不确定度测试时PDV 系统在同一伺服电机转速下测量6 次,相对测量不确定度可以表示为

测试中通过激光测距仪测得转盘半径r=184.8 mm,测点共选取11 个不同电机转速值,测试结果如表1。

表1 0.1~40 m/s 速度段测量不确定度测试结果Table 1 Test results of measuring uncertainty of PDV at 0.1~40 m/s
由表1可以看出,在1~40 m/s 速度段内,所研制的PDV 的测量不确定度可控制在2.48%以内,且对高速度的测量不确定度优于对低速度的测量不确定度。
2 现场试验验证及数据分析
2.1 现场试验设计
PDV 系统的现场试验使用中国空气动力学研究与发展中心的超高速弹道靶C(FD-18C)(如图5),炮管长度为4.5 m,试验中PDV 系统放置在弹道靶外侧,将PDV 系统的出光光纤及光学天线引入弹道靶内,在弹道靶出炮口正后方约2.2 m 位置处放置一个45°反射镜,在反射镜右侧放置光学天线,即由光学天线到超高速弹丸运动起始位置的总长度约为6.7 m。

图5 超高速弹道靶Fig.5 Ultra-high speed two-stage light gas guns
试验利用反射镜折转光路,使光学天线发出的测量光能够照射到模型表面,同时使模型表面的多普勒回波信号能够重新回到光学天线,避免天线正对炮口而被损坏。在距炮口约90 cm 位置分别安装光幕发射光源和探测器,作为PDV 系统的触发信号,弹道靶内部测试光路布置如图6。

图6 弹道靶内部测试光路现场布置Fig.6 The layout of optical path in the internal of ultra-high speed two-stage light gas guns
2.2 试验数据结果及分析
试验共设计并进行了2 种状态的超高速试验,每种状态各进行2 次重复试验。弹道靶发射预计速度分别为2 km/s 和7 km/s,试验中PDV 系统及高速示波器的设置参数如表2。

表2 试验弹道靶及系统设置参数Table 2 The parameter of ultra-high speed two-stage light gas guns and PDV
实验中将高速示波器的Chn1 通道作为触发通道,设置下降沿触发模式,当超高速弹丸飞行至光幕靶发射器下方并遮挡发射光束时,Chn1 通道接收光幕探测器输出的下降沿信号,示波器开始保存触发前采样数据。高速示波器的Chn2 通道接收PDV 所记录的测速信号,由于高速运动所引起的多普勒频率较高,时域波形已无法明显分辨信号频率。因此为了获得内弹道速度历程数据,对PDV 记录的测速信号采用短时傅里叶变换算法进行处理[15-16],结果如图7。
由图7可以看出,PDV 系统较为完整地记录了超高速弹丸的内弹道速度历程变化情况。在预计速度2 km/s 的内弹道试验中,PDV 系统的有效数据记录时间超过4 ms,最高速度为2 066.95 m/s;在预计速度7 km/s 的内弹道试验中,PDV 的有效数据记录时间1.22 ms,最高速度达到6 887.65 m/s。通过对内弹道速度历程的分析,2 km/s 试验中超高速弹丸的最长飞行距离为6.7 m,7 km/s 试验中超高速弹丸的最长飞行距离为5.35 m,因此证明PDV 系统能够实现对超高速弹丸内弹道飞行过程的完整记录。

图7 内弹道试验的时间-速度曲线Fig.7 Time-Speed curve of internal ballistic experiment
但通过对比速度仿真结果与实测速度曲线发现,在预计发射速度为2 km/s 的试验中,超高速弹丸的最高速度均低于仿真结果。3 ms 时刻对应的速度分别为2 440.00 m/s(仿真结果)、1 949.12 m/s(测试1)和1 860.99 m/s(测试2),相对差异分别为−20.11%和−23.7%,远超PDV 的测量误差范围;在预计发射速度为7 km/s 的试验中,超高速弹丸的最高速度高于仿真结果,1.28 ms 时刻对应的速度分别为6 310.00 m/s(仿真结果)和6 887.65 m/s(测试1),相对差异为+9.15%,也超过了PDV 的测量误差范围,因此认为这种速度差异可能是由于超高速发射过程自身所造成的。
为了对这种现象进行解释,首先对两种情况下的速度数据进行微分(由于预计发射速度7 km/s 的第二次试验中未测得最高速度,因此仅对仿真结果及第一次试验结果进行分析),求得速度-加速度曲线如图8。

图8 内弹道试验的速度-加速度曲线Fig.8 Speed-accelerated speed curve of internal ballistic experiment
由图8(a)可以看出,在预计发射速度为2 km/s 的内弹道试验中,仿真结果显示超高速弹丸的运动状态应为加速度一直减小的加速运动,而实测结果则显示其运动状态为加速度先增大后减小的加速运动,加速度存在极大值,且两次试验的实测加速度均低于仿真结果。
而由图8(b)可以看出,在预计发射速度为7 km/s 的内弹道试验中,仿真结果显示超高速弹丸的运动状态为加速度先增大后减小的加速运动,加速度存在极大值,运动前半段的实测加速度与仿真结果基本一致,运动后半段实测加速度逐渐大于仿真结果。
通过对预计发射速度2 km/s 的试验弹丸的回收发现,每次发射试验中弹丸的磨损位置、磨损程度存在极大差异,意味着弹丸在弹道靶内运行时所受摩擦力情况存在差异(7 km/s 试验的弹丸完全粉碎,无法进行回收分析),据此认为造成不同发射速度下,实测速度及加速度与仿真结果存在差异的原因可能为以下三点:
1)超高速弹丸在弹道靶内实际所受摩擦力大于仿真中给定的理论摩擦力,因此可能造成在预计发射速度为2 km/s 的试验中,两次实测最高速度及加速度均低于理论结果;
2)超高速弹丸与弹道靶内壁的磨损导致弹丸质量逐渐降低,且发射速度越高,弹丸磨损越剧烈,弹丸质量的下降就越明显。因此在预计发射速度为7 km/s 的试验中,弹丸运动前半段的速度及加速度实测结果与仿真结果相似性较高;而运动后半段弹丸剧烈的磨损导致其质量大幅降低,从而使其所受摩擦力也逐渐小于仿真中给定的理论摩擦力,因此运动后半段的最高速度及加速度逐渐大于仿真结果;
3)每次实验中弹丸磨损位置及程度存在较大差异,导致弹丸所受爆轰驱动力与摩擦力的合力方向存在差异,因此也可能造成多次试验中实测速度及加速度间的不同。
3 结论
本文针对超高速内弹道速度测量需求,设计了一种大景深光子多普勒测速系统,并在中国空气动力学研究与发展中心的超高速弹道靶C 上多次成功获取了超高速弹丸的速度历程数据,最高测量速度为6.89 km/s,有效测量距离(系统景深)达到6.7 m。试验结果表明,PDV 系统在长距离内弹道试验中,能够有效获取速度历程数据,与光幕靶、微波等传统测速手段相比,具有更高的时间分辨率,能够为研究内弹道瞬态特性、理解超高速运动过程提供有效的技术支撑和数据支撑。
