基于单向电流型AAMC 的海上风电直流送出方案
2022-07-26唐英杰张哲任
唐英杰,张哲任,徐 政
(浙江大学电气工程学院,浙江省杭州市 310027)
0 引言
海上风电具有风能稳定、发电利用小时数高、基本不受地形地貌影响及适合大规模开发等优点,具备广阔的发展前景,近年来国内外风电发展的重心已呈现从陆上转移至海上的趋势[1-2]。随着海上风电场逐渐延伸至深远海区域并不断扩大规模,如何实现大容量海上风电功率的远距离传输和可靠并网成为海上风力发电领域的关键技术[3]。高压直流(HVDC)输电在远距离、大容量电能传输领域具有明显的技术经济性优势,而基于模块化多电平换流器(MMC)的HVDC 输电系统被视为远海风电并网工程的标准拓扑[4-5]。然而,现有技术条件下基于MMC-HVDC 的海上风电直流送出工程的造价较为昂贵,其中海上平台的投资更是占据了整个工程投资的19%[6]。
为提高工程经济性,目前已提出多种改进方案。 在 文 献[7-8]中,电 网 换 相 换 流 器(line commutated converter,LCC)被应用于海上整流平台。与MMC 相比,LCC 技术成熟度高且输送容量大,但是通常情况下LCC 整流站均需配置不低于系统额定容量30%的静止同步补偿器(STATCOM)[9],经济性有待进一步验证。文献[10]提出基于二极管不控整流单元(diode-rectifier unit,DRU)的HVDC输电系统,充分利用了DRU 体积小、成本低、损耗少、可靠性高等优势[11]。然而作为一类特殊的LCC,DRU 同样需要外界提供换相电压,如采用构网型永磁同步风电机组[12-14]或在整流站增设辅助电压控制装置[15-16]。此外,常规MMC-HVDC 方案利用直流输电系统自身即可完成海上风电场的黑启动[17];而以DRU-HVDC 为代表的低成本直流输电拓扑方案则需要额外设置海上黑启动电源,或是通过长距离交流海缆从陆上电网汲取黑启动能量[18]。文献[19-20]采用了LCC 逆变站方案,但逆变侧LCC 的换相失败会引发直流故障电流处理问题[21]。
针对上述海上风电低成本直流送出方案存在的问题,本文提出一种采用单向电流型桥臂交替导通多电平换流器(unidirectional current alternate-arm multilevel converter,UC-AAMC)整流站的直流送出系统。单向电流型换流器最早应用于以变速驱动系统为代表的功率单向传输场景[22]。文献[23]将这一技术引入柔性直流输电系统,所提出的单向电流型MMC 所需的开关器件数目明显少于功能对等的全桥MMC,有利于提升系统经济性。海上风电柔性直流输电系统一般采用半桥MMC 作为海上换流站整流器拓扑,而本文所提的UC-AAMC 作为一种基于桥臂交替导通多电平换流器(AAMC)的单向电流型换流器,其所需子模块和开关器件的数目与半桥MMC 相比均有所减少,对内部电容储能的要求更低[24],在应用于海上换流站等对重量和可靠性要求较高的场合时更具优势。
本文首先介绍了采用UC-AAMC 整流站的海上风电直流送出系统的拓扑结构,并且对UCAAMC 的运行原理进行了分析。换流器能量平衡控制是常规AAMC 和UC-AAMC 控制系统中的重要环节,现有文献针对常规AAMC 所提出的换流器能量平衡控制策略主要包括注入三次谐波电流[25]、引入上下桥臂重叠电流[26-27]和桥臂移相控制[28]。然而,考虑到UC-AAMC 的桥臂电流方向在持续运行过程中保持不变,上述方法均无法直接用于UCAAMC 的能量控制。基于此,本文提出了一种适用于海上整流站的UC-AAMC 控制策略,具体包括换流站交流电压控制、换流器级能量控制和桥臂间能量均衡控制等环节。针对海上风电场黑启动过程,文献[29]所述基于单向电流型MMC 的直流输电系统通过改变直流线路电压实现功率反送,其动态过程与传统直流输电系统潮流反转过程类似。本文则利用单向电流型子模块自身的结构特点,提出一种通过改变直流线路电流方向实现UC-AAMC 功率反向传输的方法,同样能够为海上风电场提供启动阶段所需的有功功率支持。最后,通过PSCAD/EMTDC 的仿真算例验证了所提方案的有效性。
1 基本原理
1.1 拓扑结构
图1(a)给出了所提海上风电直流送出系统的拓扑结构,其中陆上站采用半桥MMC,海上换流站采用如图1(b)所示的UC-AAMC。UC-AAMC 具有与常规AAMC 相似的三相六桥臂主回路拓扑,各桥臂由包含Nsub个级联子模块的整形电路和包含Nswi个串联绝缘栅双极型晶体管(IGBT)及反并联二极管的导通开关构成。图中,Udc和Idc分别为换流器直流侧电压和电流。
UC-AAMC 与常规AAMC 的主要差别如下:
1)常规AAMC 一般通过装设桥臂电抗器限制上下桥臂重叠导通区间内的直流电流上升率[30],而UC-AAMC 并不存在上述工作状态,也无须安装桥臂电抗器。
2)UC-AAMC 采用单向电流型子模块(unidirectional current sub-module,UC-SM)[31]替 代常规AAMC 中的全桥子模块(full bridge submodule,FB-SM)。UC-SM 与FB-SM 具有相似的H 桥结构,如图1(c)所示,但是省去了其中一组对角线上的IGBT 开关对T2、T3。
为方便说明UC-SM 的工作原理,定义图1(c)中所标识的子模块输出电压usm和输出电流ism方向为正方向。不同开关状态下UC-SM 的输出特性如附录A 图A1 所示。
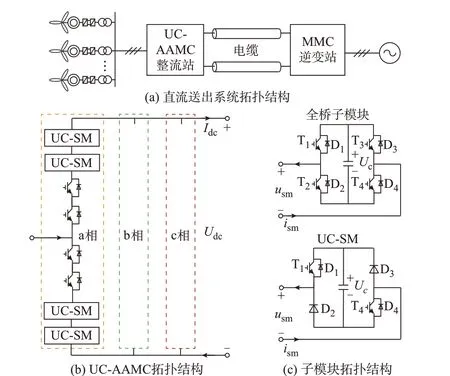
图1 基于UC-AAMC 的海上风电直流送出系统原理图Fig.1 Principle diagram of offshore wind farm DC transmission system based on UC-AAMC
当ism为正时,能够正确完成子模块正投入、负投入、切除以及闭锁等操作,且此时UC-SM 接收到的开关触发信号与FB-SM 一致;当ism为负时,UCSM 失去对输出电压的控制,usm始终等于子模块正向电容电压Uc。在正常运行过程中,导通开关内部串联IGBT 始终被施以关断信号,桥臂电流受到反并联二极管单向导电性的限制,其方向正好与ism正方向相同,从而确保级联UC-SM 在UC-AAMC 持续运行期间始终处于受控状态。从这一角度看,去掉导通开关内部串联IGBT 不会影响UC-AAMC 的正常工作性能,但本文将其保留以实现后文所述向海上风电场进行功率反送。
1.2 换流器桥臂能量平衡原则
仅考虑交流系统基频分量,并假设换流器交流侧功率因数角为φ,则UC-AAMC 的工作原理可通过图2 和图3 进行说明。图2 将交流侧三相电压uva、uvb、uvc与 交 流 侧 三 相 电 流iva、ivb、ivc在 单 个 工 频 周 期2π 内的波形划分为6 个长度为π/3 的连续区间,图3则展示了各运行区间内UC-AAMC 的工作状态和桥臂导通情况,并按照导通顺序对换流器桥臂进行了 编 号。图 中:ui和ii分 别 为 桥 臂i(1 ≤i≤6)的 输出电压和输入电流;ω为交流侧额定角频率。表1对各阶段导通桥臂的编号进行了汇总。
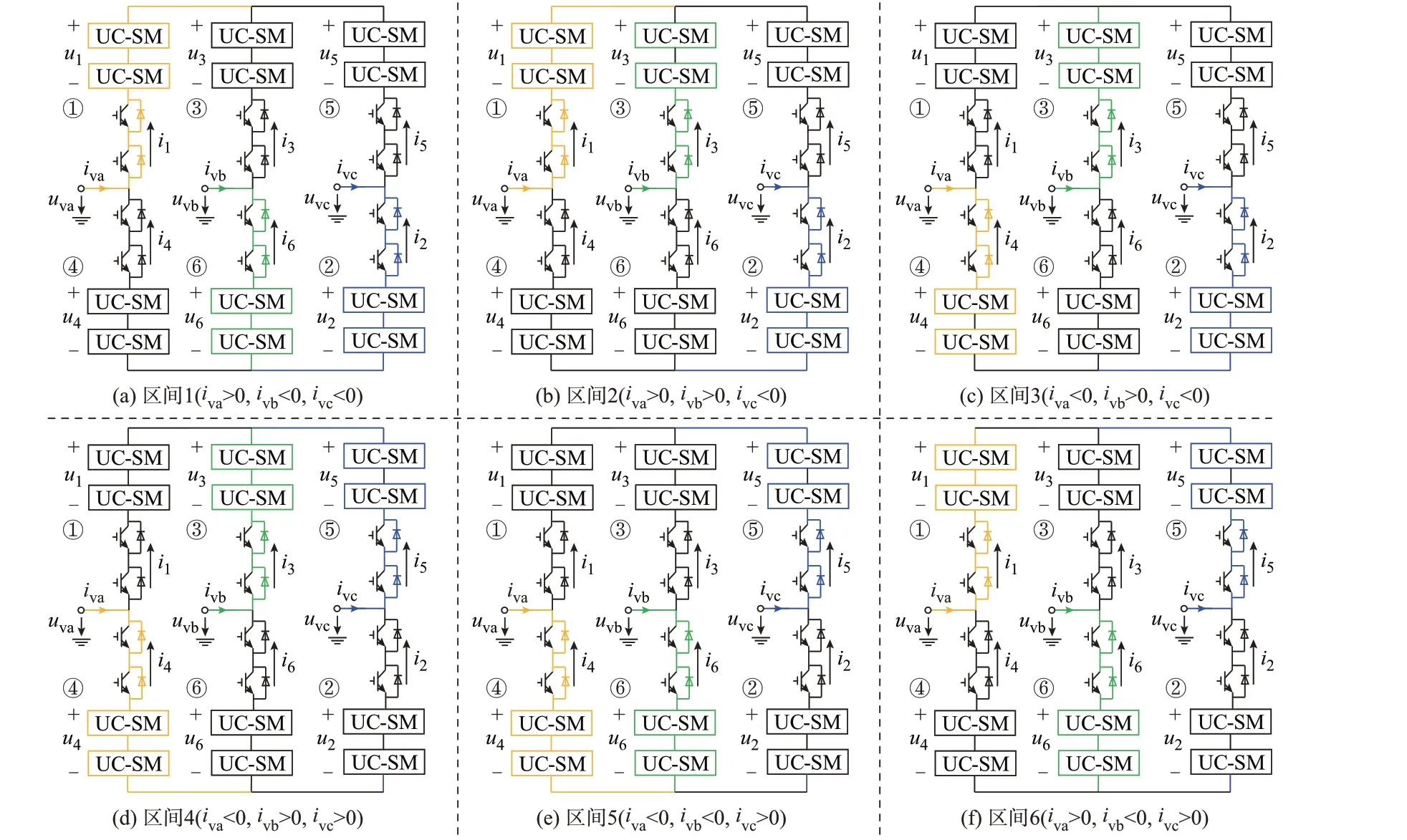
图3 正常运行期间UC-AAMC 的工作状态Fig.3 Operation states of UC-AAMC during normal operation
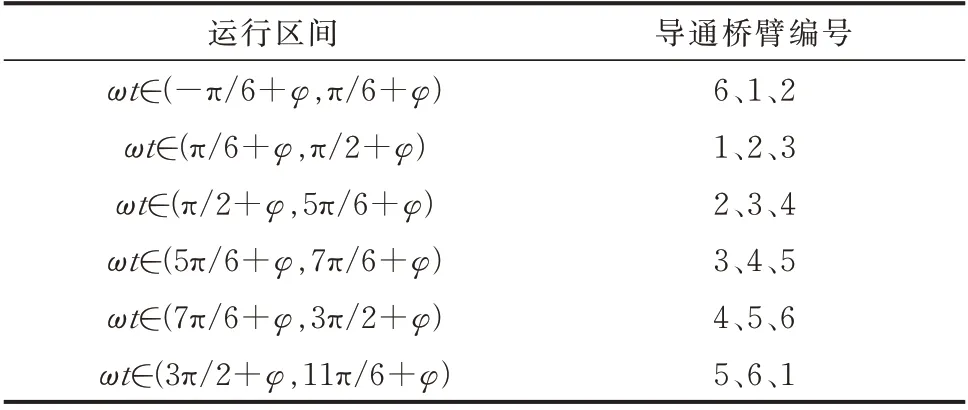
表1 不同阶段导通桥臂编号汇总Table 1 Summary for numbers of conducting arms at different stages
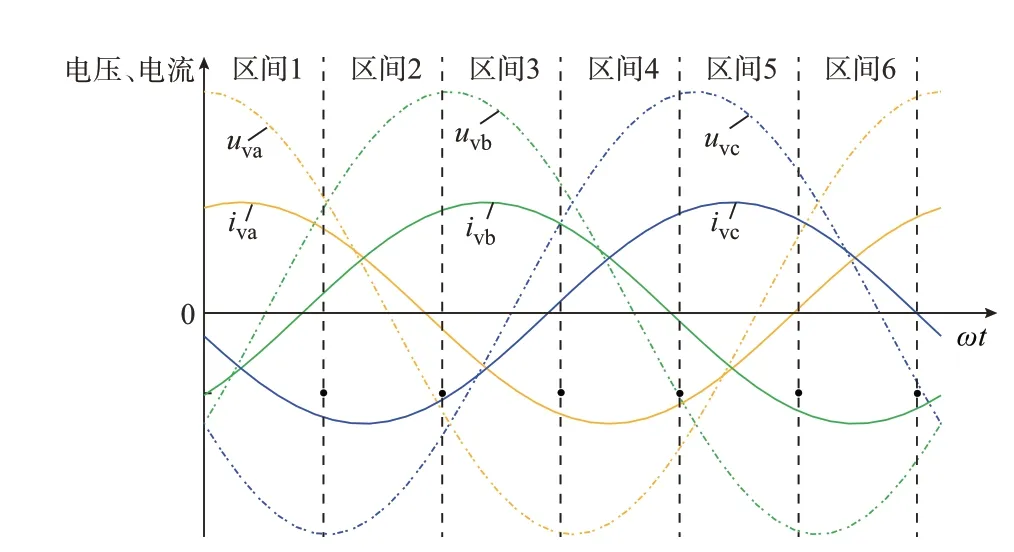
图2 正常运行期间换流器交流侧理想电压、电流波形Fig.2 Ideal waveforms of voltage and current at AC side of converter during normal operation
可以看到,UC-AAMC 各相上、下桥臂交替导通,持续导通角度为π,且在单个运行区间内仅有3 个桥臂同时处于导通状态。与常规AAMC 选择在交流侧相电压过零点切换上、下桥臂导通状态不同,UC-AAMC 上、下桥臂换流过程发生在交流侧相电流过零点,因而其桥臂输出电压和输入电流的变化情况与常规AAMC 有所不同。
以a 相上桥臂为例,其输出电压u1(t)与输入电流i1(t)可表示为:
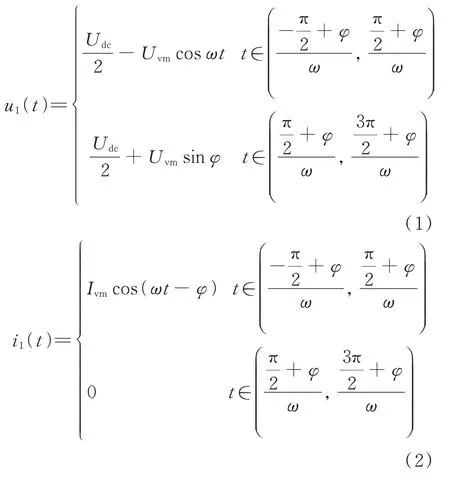
式中:Uvm和Ivm分别为交流侧相电压和相电流幅值。根据换流器结构对称性可知,其余桥臂输出电压与输入电流的变化幅度相同,仅存在相位差异。
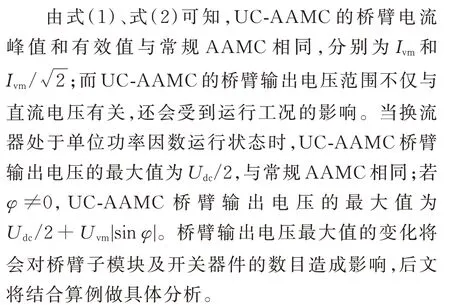
满足常规AAMC 交直流侧能量交换平衡的最佳电压关系为Uvm=2Udc/π[32],通过采用额外的换流器能量控制策略可以适当拓宽其电压运行范围。根据图3 可知,单个工频周期内UC-AAMC 桥臂级联子模块电容的能量变化ΔEarm为:
2 基本控制策略
图4 给出了对应本文所述的应用于海上换流站的UC-AAMC 的控制系统框图(不含测量滤波环节),包括换流站交流电压控制、换流器级能量控制、桥臂间能量均衡控制和调制环节等,下面分别予以介绍。
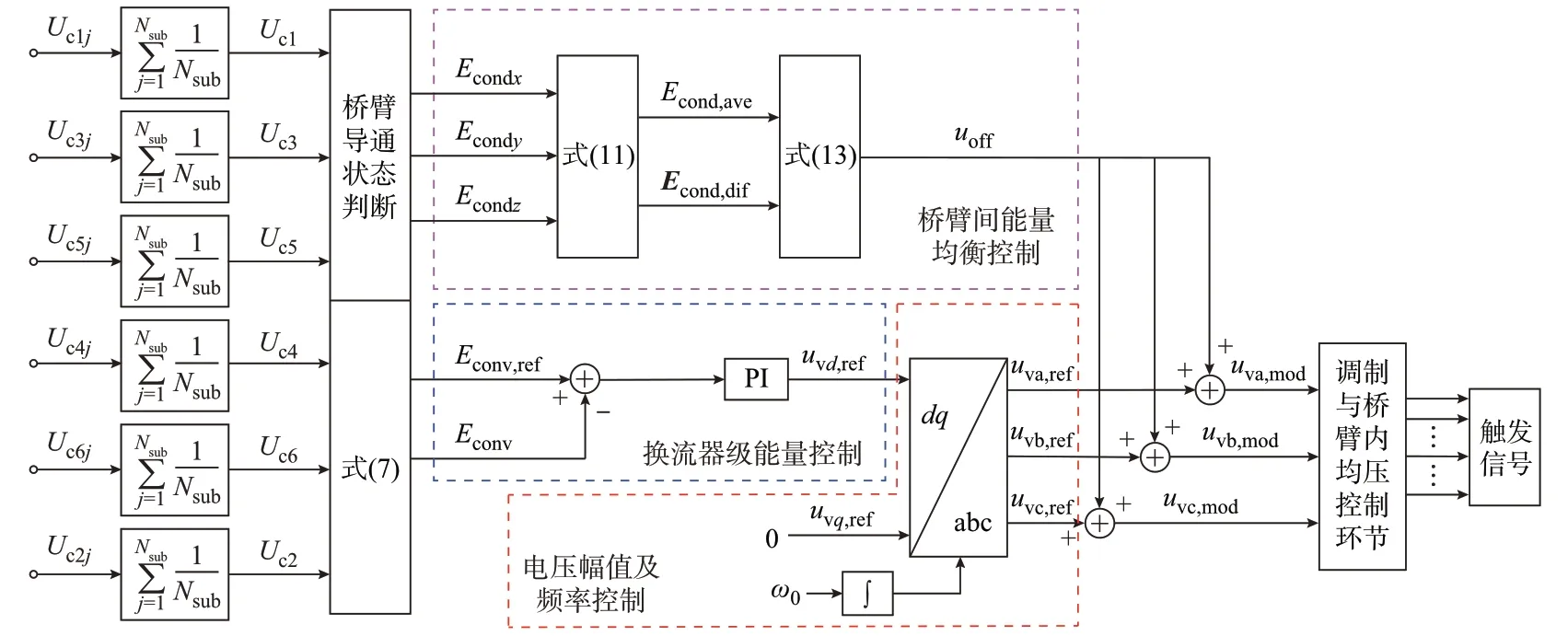
图4 应用于海上换流站的UC-AAMC 控制系统框图Fig.4 Control system diagram of UC-AAMC applied to offshore converter station
2.1 换流站交流电压控制
整流站的UC-AAMC 采用无源控制。与常规的MMC 整流站类似,其换流站交流电压控制环节表示为:
令Uvq,ref=0,则 在 稳 态 运 行 工 况 下,UCAAMC 在交流侧表现为一个频率固定为ω0、相电压幅值为Uvd,ref的交流电压源。Uvd,ref由换流器能量控制环节的输出决定。
2.2 换流器级能量控制
由式(4)可知,UC-AAMC 内部能量的变化会受到其交直流电压幅值和功率因数角相对关系的影响。由于海上整流站的UC-AAMC 工作在无源控制模式(控制换流站交流母线电压),其功率因数角由风电场内部产生的有功功率和无功功率决定;整流工况下cosφ一般为正,但并非固定值。考虑到直流运行电压在设计阶段即根据工程经济性计算结果给定[33],且陆上换流站MMC 采用定直流电压控制,其可变范围极小。据此,本文通过调节UC-AAMC交流侧输出电压幅值,对换流器内部能量进行控制。
式中:Uc,ref=Udc/Nsub为子模块电容电压参考值;Ucij和Uci分别为桥臂i内子模块j的电容电压测量值和子模块电容电压平均值;C0为子模块电容值。
2.3 桥臂间能量均衡控制
MMC 和常规AAMC 分别可以通过相间环流和重叠导通区间来控制桥臂间的能量交换;而UCAAMC 既不产生相间环流,也不存在重叠导通区间。当各桥臂能量出现差异时,子模块电容电压可能严重偏离额定值,而传统方法无法直接应用于UC-AAMC 的桥臂能量均衡控制。
根据不同区间内各桥臂能量变化情况的计算结果可知,当换流器级能量控制环节充分发挥作用即式(4)成立时,UC-AAMC 在各区间内吸收的净能量等于0,而不同导通桥臂所吸收的净能量则不相同,这意味着导通桥臂间存在能量交换。基于此,本文在桥臂输出电压中引入电压偏移项,利用导通桥臂间的能量交换过程,实现桥臂间能量均衡控制。
由引入电压偏移量所导致的各导通桥臂吸收的额外功率Pcond,ext和换流器整体吸收的额外功率Pconv,ext可 表示为:即把ucond,off设置为零序分量。将式(9)代入式(8)中,并考虑到icond=iv=[iva,ivb,ivc],则有:
式 中:G2为 比 例 控 制 环 节 的 增 益 系 数;Econd,dif,max为Econd,dif中绝对值最大的元素值。考虑到处于导通状态的桥臂序列在不停更换,桥臂间能量均衡控制环节不宜再采用PI 控制器。
零序电压偏移量的极性则由对应最大桥臂能量偏差的导通桥臂所处位置决定。结合图3 和式(8)可知,当uoff>0 时,能量将从位于4、6、2 位置的下导通桥臂转移至处于1、3、5 位置的上导通桥臂;当uoff<0 时则相反。因此,当上导通桥臂对应最大桥臂能量偏差时,若该桥臂能量大于Econd,ave,则uoff取负数;若该桥臂能量小于Econd,ave,则uoff取正数。同理,当下导通桥臂对应最大能量偏差时,uoff的符号取法与上述相反。
2.4 调制环节

式中:ux,mod为桥臂x输出电压调制信号,ux,mod的取值由交流侧电压调制信号和桥臂导通状态决定;Uc0为子模块电容电压额定值。
考虑到UC-AAMC 的桥臂电流方向保持不变,调制环节在产生子模块触发信号时遵循以下方法:在触发正投入状态子模块时,选择电容电压最高的Nposx个子模块;在触发负投入状态子模块时,选择电容电压最低的Nnegx个子模块;其余子模块保持切除状态。如此,桥臂子模块电容电压间的偏差能够得到有效控制。
3 功率反送策略
在海上风电场具备产生风电功率的能力之前,风电机组辅助设备(如偏航系统与不间断电源等)和海上交流系统电力设备(如变压器和交流电缆等)需要提前充电,以顺利完成海上风电场的启动过程。本文在基于UC-AAMC 的直流输电系统基础上,提出一种功率反送策略,通过改变直流线路电流方向实现由陆上交流系统向海上风电场的有功传输。
3.1 主回路切换
在功率反送过程中,海上换流站工作在逆变状态。在不改变线路电压极性的条件下,UC-AAMC逆变状态下的直流侧电流及桥臂电流的方向与正常运行状态(整流状态)相反。若桥臂级联子模块仍按图1(b)所示方式接入换流器主回路,则子模块输出电压失控,UC-AAMC 无法稳定运行在逆变状态。
基于此,本文在桥臂级联子模块的两端设置了由K1至K4组成的H 桥型转换开关组,如图5 所示。当UC-AAMC 需要工作在整流状态时,机械开关对K1、K3合拢,K2、K4断开,电流流通路径如图5(a)所示;当UC-AAMC 需要工作在逆变状态时,K1、K3断开,K2、K4合拢,电流的流通路径如图5(b)所示。可以看到,在上述2 种工作状态下,UC-AAMC 内流经桥臂级联子模块的电流始终保持在子模块电流正方向,桥臂输出电压可控。此时,UC-AAMC 可以稳定运行在逆变状态,逆变状态下的子模块输出电压正方向与图5(b)保持一致。

图5 UC-AAMC 工作状态转换Fig.5 Operation state switching of UC-AAMC
当UC-AAMC 处于逆变状态时,桥臂电流在导通开关内的流通路径从反并联二极管转移至串联IGBT 中。上、下桥臂中的串联IGBT 按照以下方式互补通断:当相电压调制信号为正时,上桥臂串联IGBT 触发导通而下桥臂串联IGBT 触发关断;当相电压调制信号为负时,上桥臂串联IGBT 触发关断而下桥臂串联IGBT 触发导通。
3.2 控制系统调整
当运行在逆变状态时,UC-AAMC 的功率因数角cosφ<0。因此,换流器级能量控制环节的比较器符号需要改变,如式(16)所示。

同时,逆变状态下桥臂电流流通方向反转,导致导通桥臂间能量转移的方向与电压偏移量极性之间的关系也发生改变。因此,当上导通桥臂对应最大桥臂能量偏差时,若该桥臂能量大于Econd,ave,则uoff取正;若该桥臂能量小于Econd,ave,则uoff取负。当下导通桥臂对应最大能量偏差时,uoff的符号取法则相反。
此外,逆变状态下UC-AAMC 的子模块电容充放电状态与输出电压之间的关系也发生改变。因此,需要对换流器调制策略作如下更改:在触发正投入状态子模块时,选择电容电压最低的子模块;在触发负投入状态子模块时,选择电容电压最高的子模块;其余子模块切除。
4 算例分析
本文在PSCAD/EMTDC 中搭建了如附录A 图A2(a)所示的基于UC-AAMC 的海上风电直流送出系统仿真模型。海上风电机组群以2 台采用电流源模型的等效风电机组表示[34];海上升压站采用2 台升压变压器表示;短距离中压交流馈线和长距离直流输电海缆分别采用Π 型等效电路和频率相关模型表示;海上换流站和陆上换流站分别采用UCAAMC 和半桥MMC,半桥MMC 采用详细等效模型(detailed equivalent model,DEM)表示;陆上交流系统采用戴维南等效电路表示。详细的仿真模型参数见附录A 表A1。将等效风电机组替换为可控负荷,即可得到图A2(b)所示的基于逆变型UCAAMC 的直流输电系统仿真模型,UC-AAMC 的实际电路结构根据图5 进行切换,本文采用该仿真模型以验证所提出的基于UC-AAMC 的海上风电送出系统功率反送的有效性。
4.1 UC-AAMC 其他常规方案的对比
考虑到直流电缆故障概率较小且难以恢复,海上风电柔性直流输电换流器一般采用半桥MMC。本节结合具体算例,从开关器件数目和换流器电容储能需求(对应于换流器内部电容总量)两方面出发,对UC-AAMC、常规AAMC 和半桥MMC 进行简要比较。
UC-AAMC 桥臂整形电路级联子模块输出电压最大值Uarm,max可表示为:
式中:Urate为根据开关器件耐压能力决定的子模块电压额定值;Ceil(·)表示向上取整函数。
式中:ΔEarm,p2p=maxEarm(t)-minEarm(t)。
根据UC-AAMC、常规AAMC 和半桥MMC 的工作原理,可得到其对应的桥臂能量变化时域表达式ΔEarm(t)、ΔEarm1(t)、ΔEarm2(t)分别为:
考虑到换流器运行工况会对换流器主回路参数产生影响[35],取换流器直流侧输出功率Pdc为1.0 p.u.,交流侧无功功率在(-0.2,0.2)p.u.范围变化;IGBT 和子模块电容的额定电压分别为3.3 kV和1.6 kV;子模块电容电压波动率为10%。表2 给出了3 种换流器拓扑中IGBT 数目和子模块电容需求的计算结果。从表2 可以看出:

表2 不同换流器拓扑计算结果对比Table 2 Comparison of calculation results between different converter topologies
1)尽管UC-AAMC 所需桥臂子模块数目多于常规AAMC,但是单向电流型子模块所需IGBT 的数目仅为FB-SM 的1/2,使UC-AAMC桥臂所需IGBT 的数目远小于常规AAMC,同时也略小于半桥MMC;
2)UC-AAMC 对应的开关器件容量明显小于半桥MMC,这一方面是因为交流侧电压提升导致同等容量对应的换流器交流阀侧相电流有效值减小,另一方面是由于UC-AAMC 桥臂仅导通半个周期而半桥MMC 桥臂持续导通;
3)上述运行特性同样使得UC-AAMC 桥臂在运行工程中的能量变化范围较小,所需要的电容储能小于半桥MMC,UC-AAMC 与常规AAMC 的电容储能需求则差别较小。
4.2 正常运行工况
假设在t=0 s 之前直流系统直流电压已由陆上换流站MMC 稳定建立。在t=0 s 时海上换流站UC-AAMC 解锁,各等效风电机组开始输出有功功率。风电场启动过程中海上交流系统及换流站交直流侧的动态变化特性如附录A 图A3 所示。等效风电机组1 和2 输出的有功功率逐步上升至额定值,无功功率始终控制为0。
在功率变化过程中,风电机组1 和2 的并网点电压有效值以及高压交流海缆馈线送受端电压有效值能够基本稳定在额定值附近。海上换流站吸收的有功功率随风电机组输出有功功率的变化而变化。同时,为了维持海上风电场电压和频率的稳定,海上换流站还需吸收少量的无功功率。海上换流站直流侧正负极线电压在功率上升过程中基本维持在额定值;直流电流随有功传输功率的增大而增大,稳态下的直流电流包含一定的谐波分量。
附录A 图A4 对海上换流站UC-AAMC 的稳态运行特性进行了清晰地描述。可以看到,换流站交流母线电压和并网电流的正弦化程度高,谐波特性较好,这得益于UC-AAMC 的MMC 拓扑结构。换流器上下桥臂交替导通,各桥臂电流始终为正,符合UC-AAMC 的运行需求;各桥臂子模块电容电压平均值在额定值上下较小范围内波动。换流器直流侧输出电流主要包含直流分量和6 次谐波分量。
为验证本文所提换流器级能量控制策略的有效性,在t=2.0 s 时闭锁换流器级能量控制环节的输出。尽管海上换流站的交流母线电压和并网电流基本不受影响,但是海上换流站交流侧吸收有功功率和直流侧输出有功功率之间存在不平衡,UCAAMC 存在能量净流出现象,导致换流器子模块电容电压平均值逐渐下跌,如附录A 图A5所示。在t=2.2 s 时,解锁换流器级能量控制环节,可以看到换流器子模块电容电压平均值均能迅速恢复至额定值。
同理,在t=2.0 s 时闭锁桥臂间能量均衡控制环节并在t=2.4 s 时解锁该控制环节,以此来验证桥臂间能量均衡控制策略的有效性。可以看到,即使不进行桥臂间能量均衡控制,换流器的交直流侧输出特性在短时间内也基本不受影响,换流器电容电压平均值仍维持在额定值;但各桥臂内储存的电容能量之间的差异逐渐扩大,体现为桥臂电容电压平均值逐渐发散,如附录A 图A6 所示。而重新进行桥臂间能量均衡控制环节后,桥臂电容电压之间的差异将迅速缩小。
风电机组通常采用最大功率跟踪控制策略,风电场实时产生的有功功率将随风速条件的变化而变化。假设t=2.0 s 时海上风电场因风速降低而导致输出功率下降,海上风电场新的稳态功率运行点降为0.8 p.u;而在t=2.5 s 时海上风电场风速及输出有功功率恢复至额定值。风电功率波动过程中,海上交流系统内部和海上换流站交直流侧的动态变化特性如附录A 图A7 所示。可以看到,海上换流站能够在吸收风电场实时有功功率的同时具备无功功率输出调节能力,以维持对海上交流系统电压的控制;海上风电送出系统能够迅速而平稳地在不同稳态运行点间切换。
4.3 功率反向传输
假设在t=0 s 之前直流系统直流电压已由陆上换流站MMC 稳定建立。在t=0 s 时海上换流站UC-AAMC 解锁,可控负荷接入海上风电场,其吸收的有功功率从0 开始逐步上升至200 MW。此时,海上交流系统内部和海上换流站交直流侧的动态变化特性如附录A 图A8 所示。可以看到,当可控负荷吸收的有功功率逐步上升至设定值时,海上换流站UC-AAMC 不仅能够提供负荷所需有功功率,还能输出适当的无功功率以维持海上交流系统电压和频率稳定。
附录A 图A9 则更为清晰地展示了逆变工况下UC-AAMC 内部稳态特性。可以看到,逆变工况下UC-AAMC 交流侧输出电压电流谐波特性仍能保持良好,但是受导通开关触发方式影响略差于整流工况;桥臂电流方向相反,桥臂子模块电容电压能够维持稳定;换流器直流侧输出电流除包含直流分量外还含有一定的谐波分量。
5 结语
本文对UC-AAMC 的拓扑结构和工作原理进行了分析,并提出了适用于海上风电送出系统海上换流站UC-AAMC 的控制策略。
理论研究及仿真结果表明,当海上换流站采用UC-AAMC 的拓扑结构时,能够提供海上风电场交流电压和频率控制;通过简单的主回路切换和控制系统调整,UC-AAMC 能够运行在整流工况或者逆变工况下,从而具备实现由陆上交流系统向海上风电场进行功率反送的能力。此外,与半桥MMC 相比,UC-AAMC 所需开关器件数目和电容储能均有所减小,有助于改善工程经济性。
为了更加全面地掌握基于UC-AAMC 的海上风电输电技术,后续还需在本文所提换流器拓扑结构与基本稳态控制策略的基础上对UC-AAMC 展开进一步研究,主要包括交直流侧故障穿越策略、子模块电容电压波动优化控制方法等。受篇幅限制,本文并未对UC-AAMC 与其余同样具有应用潜力的海上整流站换流器拓扑(如单向电流型MMC)进行详细全面的对比。后续还将建立更加合理的UCAAMC 主回路参数计算方法和经济性评估模型,为验证该方案的可行性提供更加充分的理论依据,也为不同应用场景和规划下的换流器拓扑选型提供参考指标。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
