轮式机器人:创新设计与实验研究
2022-07-26郭为忠
徐 浩 郭为忠
(上海交通大学机械与动力工程学院 上海 201100)
1 引 言
移动机器人是机器人的重要分支之一,可满足人类在各类环境下的移动和运载需求,在野外作业、仓储物流、环卫清洁、导游导购等领域扮演着越来越重要的角色。根据移动方式,移动机器人可分为轮式、腿式、履带式、混合式等多种类型。轮式机器人具有结构简单、移动快速、能效比高等优势,是最为常见的移动机器人类型。轮式机器人在地形平坦开阔的结构化环境[1]中优势明显,如工厂自动导引车、家用扫地机器人、商场导购机器人等,能简单高效地完成既定任务。腿式和履带式机器人由于具有较好的地形适应性,在地形复杂的非结构化环境中应用更多。但履带式机器人的运动灵活性相对较弱,而腿式机器人的结构则较为复杂,对控制要求较高。
目前,对各类移动机器人的研究均在不断深入,在已有研究的基础上,本文着重讨论轮子结构与轮式机器人的移动方式,针对崎岖地形翻越、垂立壁面爬升、地面全向移动等不同的场景和任务,通过轮子和轮式移动结构的变革和创新,丰富轮式移动机器人的形式,拓展轮式移动机器人对不同地形的适应能力。
2 轮子结构与轮式机器人的移动机理分析
轮子被视为人类重要的发明之一,距今已有6 000 多年历史。千百年来,轮子的结构经过不断演变,其舒适性、安全性、耐用性不断提高,但移动形式基本未变。轮子的核心功能在于将滑动摩擦转变为滚动摩擦,从而大幅减小移动的地面阻力。近年来,为提升轮式移动系统的工作效率,及其对环境的适应能力,各国学者在轮子自身的几何形态、轮子与行驶表面的吸附方式、行驶过程中的转向方式等方面进行探索和改造,如图 1 所示。

图1 不同轮子的分类Fig. 1 Classification of different wheels
在轮子自身的几何形态方面。常见的轮子外形为完整的圆形,因为圆形轮子的圆心到圆周距离相同,可有效保证运动的平稳性。然而,圆形本身平滑的结构限制了轮子通过复杂地形的能力,即越障能力较差。因此,各国学者从“叠加功能”和“改变外形”两个方向入手,设计了不同类型的轮腿复合机器人,兼具轮式和腿式机器人的优点。“叠加功能”的轮腿机器人通过简单组合的方式,直接将轮子安装在腿部末端[2-3],这类机器人在吸收腿式机器人优点的同时,兼具结构和控制复杂的缺点。“改变外形”的轮腿机器人则通过调节机构的驱动,使轮子能够在圆轮模式和腿模式之间切换,通常被称为变形轮机器人[4-5]。变形轮机器人打破了轮子的完整性,其单个轮子由多个部分组成,通过调节机构的牵引完成形状的变化,从而实现在不同地形条件下相应模式的切换。大多数变形轮机器人只有一种轮腿模式,如 wheel transformer[6]的单向越障高度达到了轮子半径的 3 倍以上,但它无法从另一个方向越障,即当机器人利用腿部末端“勾”住障碍物爬上台阶之后,需要转向 180°才能实现反向越障,从而避免跌落。在地形狭窄的环境中,这类机器人的越障效果将受到限制,而双向越障功能的出现减少了变形轮机器人对越障方向的依赖性。
在轮子与行驶表面的吸附方式方面。一般来说,轮式移动系统的行驶功能是依靠轮子和行驶表面的摩擦力作为驱动力实现的。因此,需要轮子可靠地附着在行驶表面以维持摩擦关系,即确保轮子提供指向行驶表面的法向附着力,进而提供足够的摩擦力,保证驱动和转向等行驶功能的实现。在重力作用下,地面运动的轮式移动系统可直接附着在行驶表面,但对于在垂直壁面上运动的机器人,则需要额外提供吸附力确保机器人附着在壁面上。对于壁面机器人,其受到的吸附力较为关键,需要保证轮子始终吸附在壁面上,一旦分离将导致机器人坠落,造成机器人损坏。因此,壁面运动机器人需要充足的吸附力和适应行驶表面变化的机构。壁面运动机器人的吸附力有不同来源,如磁吸式机器人[7-8]的吸附力来自磁力,负压式机器人[9-10]的吸附力来自大气压力差。
在行驶过程中的转向方式方面。普通的轮式机器人通常只能沿前进方向运动,转向往往需要多个轮子协同完成,全方位转向能力有限。全向轮机器人解决了普通轮子只能单向运动的局限,拓展了机器人的运动方向。一般地,全向轮机器人通过改变普通轮子与车身的连接方式,或在普通轮子上增加新的活动部件,从而实现全向运动。目前,对于搭载了正交轮[11]、Omni 轮[12]、Mecanum 轮[13-14]、球轮[15-16]、驱动全向轮[17]以及全向轮和普通轮子的组合[18]等具有确定构型的典型全向轮的机器人,其运动特性和力学特性是明确的。但在某些运动情况下,可能存在单个轮子驱动力过大的情况,若能够调节全向移动机构(如 Mecanum 轮的辊子)和轮子的相对关系,就能根据实际运动工况进行调节,从而获得最佳运动效果。
由上述分析可知,针对不同的应用场景和任务,轮子结构及轮式移动形式都有可能发生新的变化,需要相应的创新设计。下面将从轮子自身的几何形态、轮子与行驶表面的吸附方式和行驶过程中的转向方式 3 个方面展开讨论,通过改变轮子和轮式移动结构,使其满足崎岖地形翻越、垂立壁面爬升、地面全向移动等场景的工作要求。
3 三模式变形轮及其移动机器人的创新设计与实验
3.1 三模式变形轮及其移动机器人的结构创新设计
在实际崎岖地形中,机器人遇到的障碍物类型复杂,因此,本节提出一种具有 3 种运动模式的变形轮机器人[19]。该机器人的每个轮子都可以通过电机驱动,实现在圆轮模式、爪模式和勾模式 3 种形态间切换,如图 2 所示。其中,勾模式和爪模式作为两种不同的轮腿模式,分别满足机器人前进和后退时越过障碍物的不同需求。

图2 变形轮机器人及其轮子的 3 种模式[19]Fig. 2 Transformable wheel robot and the three modes of the wheel[19]
本文设计的变形轮可视为一个四连杆机构通过周向阵列得到,变形电机带动主动盘沿顺时针或逆时针方向转动,使轮子在 3 种模式之间进行切换,变形轮的结构及 3 种模式如图 3 所示。当主动盘沿顺时针方向转动时,推动连杆带动腿杆运动,圆轮模式切换为勾模式;同样地,当主动盘沿逆时针方向转动时,圆轮模式切换为爪模式。在勾模式下,主动盘上的OA和连杆AB共线,由于机器人在前进和后退过程中变形已经结束,所以当变形轮为勾模式时,BC所在圆弧段受到地面支撑力,此时,BC为主动件(曲柄),构成四杆机构的死点锁死状态;在爪模式下,连杆AB和主动盘上的A′ 干涉,构成干涉锁死状态。在死点锁死和干涉锁死状态下,主动电机不需要额外提供驱动力,变形轮即可保持此状态。

图3 变形轮结构及其 3 种模式Fig. 3 Structure of the transformable wheel and its three modes
机器人单个轮子的越障过程如图 4 所示。当机器人在前进方向或后退方向遇到障碍物时,轮子可由圆轮模式切换为勾模式或爪模式,进而通过腿部末端勾住障碍物实现越障。两种轮腿模式保证机器人不需要调转车身,就能在前后两个方向实现越障。当机器人翻越台阶时,由圆轮模式具体切换为勾模式或爪模式,取决于车轮相对台阶的方向,保证切换之后能够使勾、爪的尖端勾住台阶。

图4 单个轮子的前后越障过程[19]Fig. 4 Obstacle overcoming process of a single wheel in front and rear directions[19]
3.2 三模式变形轮机器人实验研究
图 5 为三模式变形轮机器人模型。机器人共有4 个变形轮,每个轮子包含两个相同的无刷电机,其中,驱动电机用于驱动整个轮子的转动,变形电机用于驱动轮子的模式切换。轮子上的光电开关用于初始化轮子的位形,结合编码器可控制轮子变形到达既定位置。滑环用于传输变形电机的电信号和控制信号,避免轮子转动过程中电机线缠绕。三模式变形机器人的参数汇总如表 1 所示。

表1 机器人详细参数设计Table 1 Specifications of the robot

图5 机器人整体结构示意图[19]Fig. 5 Configuration of the robot[19]
在两种轮腿模式下,可控制机器人攀爬不同高度的台阶。台阶初始高度为 150 mm,当机器人攀爬成功后,台阶高度增加 5 mm,控制机器人重复攀爬直至得到机器人可攀爬最大越障高度,实验结果如表 2 所示。由表 2 可知,实验中机器人能够攀爬超过自身轮子半径两倍的障碍物,但是与理论值相比,存在约 10% 的误差,这是由于理论计算时忽略了轮子零件的厚度。

表2 机器人攀爬障碍物高度的理论值和实验值对比Table 2 Comparison between theoretical and experimental results of robot climbing obstacle height
为证明机器人在崎岖地形的运动能力,本文设计了几组实验,包括穿越起伏不平地形和连续台阶地形。图 6(a)~(g)为机器人翻越哑铃堆和沙袋构建的复杂地形的过程,其中,在图 6(a)~(b)中,机器人以圆轮模式在平坦地面上运动,以达到快速运动的目的;在图 6(e)~(g)中,机器人以爪模式翻越复杂地形,实现越障的目的;图 6(h)~(l)展示了机器人以爪模式翻越高度为 120 mm 的两级连续台阶的过程,由于台阶高度超过了车轮半径,在圆轮模式下,机器人无法爬上此高度的台阶,当切换为爪模式或勾模式后,能够顺利爬上台阶。

图6 机器人穿越不平坦地形的实验[19]Fig. 6 Experiment of the robot traversing uneven terrain[19]
4 垂直壁面磁吸附移动机器人的创新设计与实验
4.1 垂直壁面磁吸附移动机器人的结构设计
在大型立式壁面(如核反应堆压力容器、发电厂冷却塔和大型船舶的壁面等)上进行检测和作业时,人工或机电设备到达这些垂直壁面的能力决定了检测和作业的效果,全覆盖的到达能力意味着工作人员能够对壁面进行全面、充分的检查作业。针对核电站等应用场合中较为常见的铁磁性壁面,本文设计了一种能够适应垂直壁面曲率的磁吸附爬壁机器人。该机器人将用于检查大型容器钢板焊缝的质量,其工作环境是存在焊缝等凸起的铁磁性垂直壁面。在工作过程中,机器人必须具备极高的稳定性,一方面是因为机器人翻越焊缝凸起时存在坠落的风险,另一方面是因为两轮以上的机器人差速转向时容易产生滑移。为了满足这一性能,本研究设计了被动式非独立悬架,用以平衡各轮子所受到的作用力,确保机器人平稳越过障碍物。
图 7 为磁吸附机器人的模型渲染图和爆炸图。由图 7 可知,整个机器人由车身、相机模块、悬架和车轮等部分组成。其中,车身内部放置了主要的电路元件,悬架类型为三自由度被动式非独立悬架,其能够在 6 个车轮磁吸附力的作用下,保证车轮始终与壁面接触。机器人通过磁性轮稳定地吸附在壁面上,由技术人员控制机器人在钢板表面运动,摄像头负责将采集到的焊缝图像传输至控制端,由技术人员检查图像中的焊缝质量。在机器人运动过程中,由于悬架对壁面曲面具有适应性,使得机器人轮子在任何位置均能够贴合壁表面,提高了机器人吸附壁面的稳定性和工作的安全性。

图7 磁吸附机器人模型图Fig. 7 Model of the magnetic adhesion robot
爬壁机器人的车轮结构如图 8(a)所示。车轮主要由电机、磁铁、轮毂和防滑材料等部分组成,电机轴直接与轮毂相连,弧形磁铁及其上方的轭铁安装在电机下方的磁铁支架内。当电机带动轮毂旋转,进而推动整车运动时,磁铁并不会随着车轮转动,保证了磁力大小的稳定,进而保证了机器人吸附壁面的稳定性。悬架末端通过一个转动副与轮子相连,如图 8(b)所示,当轮子侧边越过焊缝等凸起时,轮子将绕着转动副发生转动,在悬架的共同作用下,车身的状态几乎不会受到影响,从而确保了机器人运动的平稳性。

图8 机器人车轮结构组成Fig. 8 Structure of the wheel
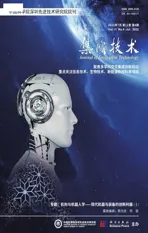
磁吸附轮的磁铁设计是保证机器人运动安全性和灵活性的关键。较大的磁力有助于机器人更加稳定地吸附在壁面上,提高安全系数;但磁力过大将导致车轮在运动过程中受到较大的滚动摩擦力,且差速转向时前后两组车轮沿轴线方向均有速度分量,进而导致滑动摩擦。因此,车轮磁铁的磁力应在合理的范围内,且前后车轮的磁力应小于中间车轮。本文设计的中间车轮磁力为前后车轮磁力的两倍,以弧形磁铁外径Rm、内径rm、圆心角θm、轭铁厚度dy和磁铁与壁面距离dg为优化变量(如图 9(a)所示),每个变量分别选取 5~10 组取值,优化目标是实现磁力和磁铁质量的平衡。对机器人各部分结构、电子元件质量进行估计,预计机器人质量不超过 2 kg。机器人在壁面吸附时,磁力必须足够大,使车轮在竖直壁面不会打滑,所选车轮防滑材料和壁面摩擦系数不低于 0.4,根据摩擦力公式可计算得到磁力至少为 49 N。在 Maxwell 仿真软件中对不同组合的参数进行仿真,图 9(b)展示了在有无轭铁的情况下,dg对单个车轮磁力大小的影响,由图 9(b)可知,随着dg的增大,磁力大小下降趋势明显。综合弧形磁铁外径Rm、内径rm、圆心角θm和轭铁厚度dy对磁力大小的影响,最终选用的磁铁参数如表 3 所示。

图9 车轮磁铁仿真参数及其结果Fig. 9 Simulation parameters and results of the magnet inside the wheel
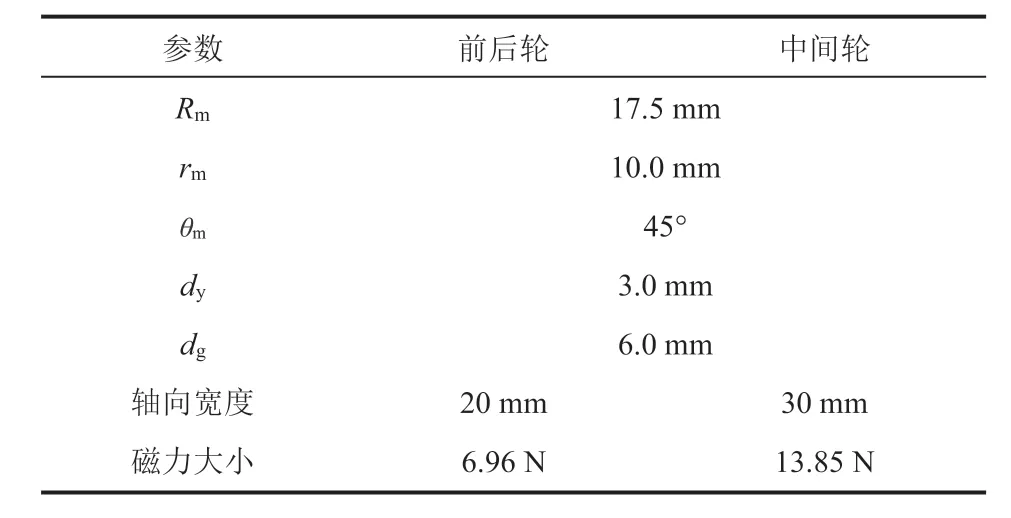
表3 车轮磁铁仿真参数及磁力大小Table 3 Simulation parameters and magnet forces of the wheels
综上所述,轮式机器人的车轮磁铁组件由两枚磁极相反的弧形磁铁和轭铁构成。采用如表 3所示的参数,机器人车轮所产生的总磁力大小为55.54 N,满足设计目标。且仿真结果显示,与整周布置磁铁的方式相比,本文设计的轮式机器人的磁铁质量降低了 75%,而磁力大小只减少了 15%。
4.2 磁吸附移动机器人壁面运动实验研究
如图 7 所示,在最终设计的模型中,机器人结构部分包含 6 个磁吸附轮子、两个悬架和一个车身平台。其中,机器人悬架和轮子通过 3D 打印加工得到,底盘等板件通过碳纤维切割得到,中间轮子电机连接了编码器,用于读取转速信息。机器人详细参数设计如表 4 所示。

表4 磁吸附机器人详细参数设计Table 4 Specifications of the magnetic wheel robot
对机器人的壁面运动能力、焊缝通过能力和负载能力进行测试,实验结果表明,本文设计的机器人能够在核电厂安全壳等壁面完成焊缝检测的任务。
首先对机器人的弧形壁面适应能力进行测试。弧形壁面是厚度为 5 mm 的 Q235 钢板,壁面最低处水平而最高处垂直。图 10 为机器人在壁面上直线运动的过程,将机器人倾斜放置在壁面上,此时,悬架本身以及轮子和悬架之间的被动自由度均发挥作用,使得每个轮子都与壁面紧贴。当机器人直线运动时,其最大速度约为0.5 m/s。图 11 为机器人在弧形壁面转向运动的过程,转弯半径约为 3 m。

图10 机器人在弧形壁面沿直线运动Fig. 10 Locomotion of the robot along a straight line on the arc wall

图11 机器人在弧形壁面转向运动Fig. 11 Locomotion of the robot along a curve on the arc wall
在真实壁面上,机器人需要通过不同高度的焊缝,因此,本文利用 3D 打印模拟了不同高度的弧形焊缝。如图 12 所示,绿色和灰色分别是实际高度为 3.5 mm 和 5.5 mm 的焊缝(宽 20 mm),由图 12 可知,机器人可稳定越过两个焊缝,且均能够平稳地吸附在壁面上。

图12 机器人越过不同高度的模拟焊缝Fig. 12 The robot crosses simulated welds at different heights
在实际工作中,机器人可能还需要搭载一些设备进行辅助工作,因此,需要具备一定的负重能力。在强磁性的弧形壁面和弱磁性的黑板面上,对机器人的负载能力进行测试,测试结果如图 13 所示。如图 13(a)~(b)所示,机器人在黑板面上的最大负重为 0.6 kg,当继续增大负重时,轮子出现打滑,对应的运动速度为 0.08 m/s;如图 13(c)所示,在弧形壁面上,机器人负重可达 0.8 kg,对应的最大运动速度为 0.065 m/s。

图13 机器人负载能力测试Fig. 13 Robot load capacity test
5 变参数全向轮及其全向移动机器人的创新设计与实验
5.1 变参数全向轮及其移动机器人的结构创新设计
为了使全向轮机器人在运动过程中具备不同的速度和力学特性,本节提出一种可变辊子安装角的变参数全向轮。首先设计了辐射式联动机构,以此为基础实现了对辊子安装角度的调节,然后搭建了机器人平台对其进行测试。
全向轮机器人的内部逻辑如图 14 所示。在每个车轮的圆周上安装若干辊子,这些辊子可以绕辊子轴自由旋转。辊子轴和轮子主轴夹角为辊子安装角,地面对辊子的作用力包含与辊子轴平行的 和垂直的 。由于辊子可以绕辊子轴自由旋转,因此, 只影响辊子的自转运动(即为图 14(b)中的ωpi),对整个系统的运动影响很小[20-23],而 在合成车身所受的合力 、 和M中起着重要的作用并最终体现为速度为vx、vy和ω的运动效果。通过改变 等结构参数,可以改变 的方向,进而改变车身所受的合力,该过程即为力的方向的调节。改变参数 不会改变车轮之外的结构参数,便于机器人的模块化设计。由于每个轮子的辊子数目较多,所以必须在轮中加入联动机构,才能实现对辊子安装角的同步调节。
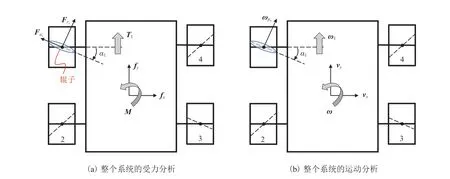
图14 全向轮内部逻辑示意图Fig. 14 Internal logic diagram of the omnidirectional wheel
本节设计了一种变角全向轮[24],即辊子角度可变的全向轮。为同步调节全向轮轮毂圆周上所有辊子的安装角,即通过单个调节构件实现对所有辊子的联动调节,本文设计了辐射式联动机构。
辐射式联动机构也称为 R-nSSR 并联机构,其结构示意图如图 15(a)所示。该机构有n+1 条完全相同的支链,所有支链共享一个驱动转盘,单个支链对应的机构简图如图 15(b)所示。支链由转盘、构件 P1~P4以及辊子支架组成,其中,转盘与 P1之间为固定副,P1与 P2之间为 S 副,P2与 P3之间为 S 副,P3与 P4之间为固定副,P4与辊子支架之间为固定副,辊子支架与机架之间为转动副 R2,辊子可以绕着辊子轴自由转动。当 R1产生角位移后,n条 SSR 支链末端的 R2也产生相应角位移。从 R1到 R2联动的本质是空间RSSR 机构。
图15 辐射式联动机构Fig. 15 Radial synchronous mechanism
采用 D-H 建模方法可建立空间 RSSR 机构的运动学模型,然后可根据各杆件的干涉、辊子调节范围等约束条件确定参数范围,再根据驱动力等优化目标选取最佳参数[24]。本文选取一个驱动力敏感性指标作为优化目标,即让辊子安装角对驱动力的影响最小。此外,考虑到辊子对驱动端最好能够“锁死”,驱动端到辊子端无死点,以及整个运动链无干涉等约束条件,最终得到的设计如图 16 所示。
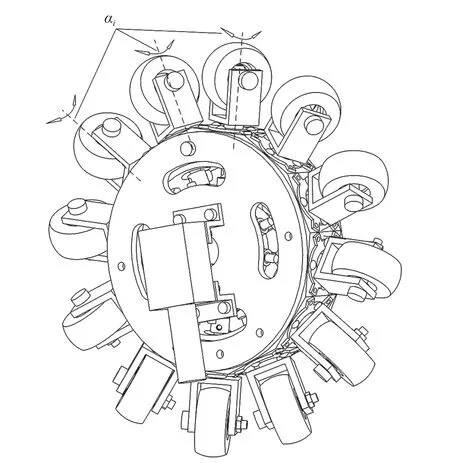
图16 最终的全向轮模型图Fig. 16 Final model of the omnidirectional wheel
5.2 实验研究
根据上述实验与讨论,最终的样机模型由 4 个变角全向轮组成,每个全向轮由一个带有编码器的调节电机来调整辊子的安装角。调节电机的额定扭矩为 4 N·m,额定转速为 13 r/min;驱动轮子转动的电机额定扭矩为 9 N·m,额定转速为 18 r/min。机器人单个轮子和样机实物图如图 17 所示。

图17 机器人单个轮子和样机实物Fig. 17 Prototype of a single wheel and the robot
图 18 为全向轮辊子安装角调节过程,该过程验证了只用一台电机即可同步调节全向轮上 12个辊子的安装角,即在主动盘的带动下,轮子圆周上的辊子可通过 RSSR 机构实现角度的调节。本实验还对机器人横向移动和曲线运动的运动过程进行测试。理论上,通过轮子的速度组合,机器人最终可以稳定为给定运动形式。本实验将机器人横向移动的速度设定为 1 mm/s,轮子转动速度设定为 5 °/s;在曲线运动下,设定轮子的纵向移动速度为 1 mm/s,绕中心转动速度为 1 °/s。两种运动形式对应的实际速度变化曲线和实物状态,如图 19 所示。由图 19 可知,系统在稳定后可按照期望速度运动。
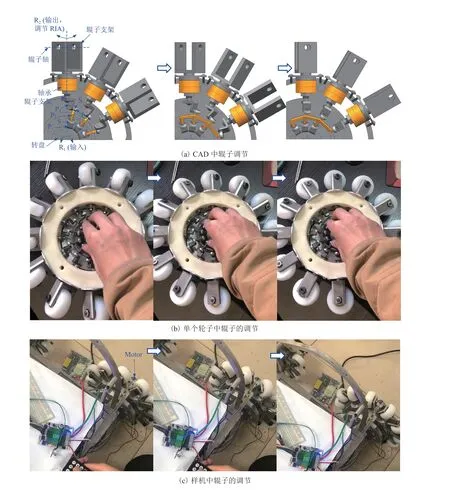
图18 全向轮辊子安装角调节过程Fig. 18 Adjustment process of angle of omnidirectional wheel roller
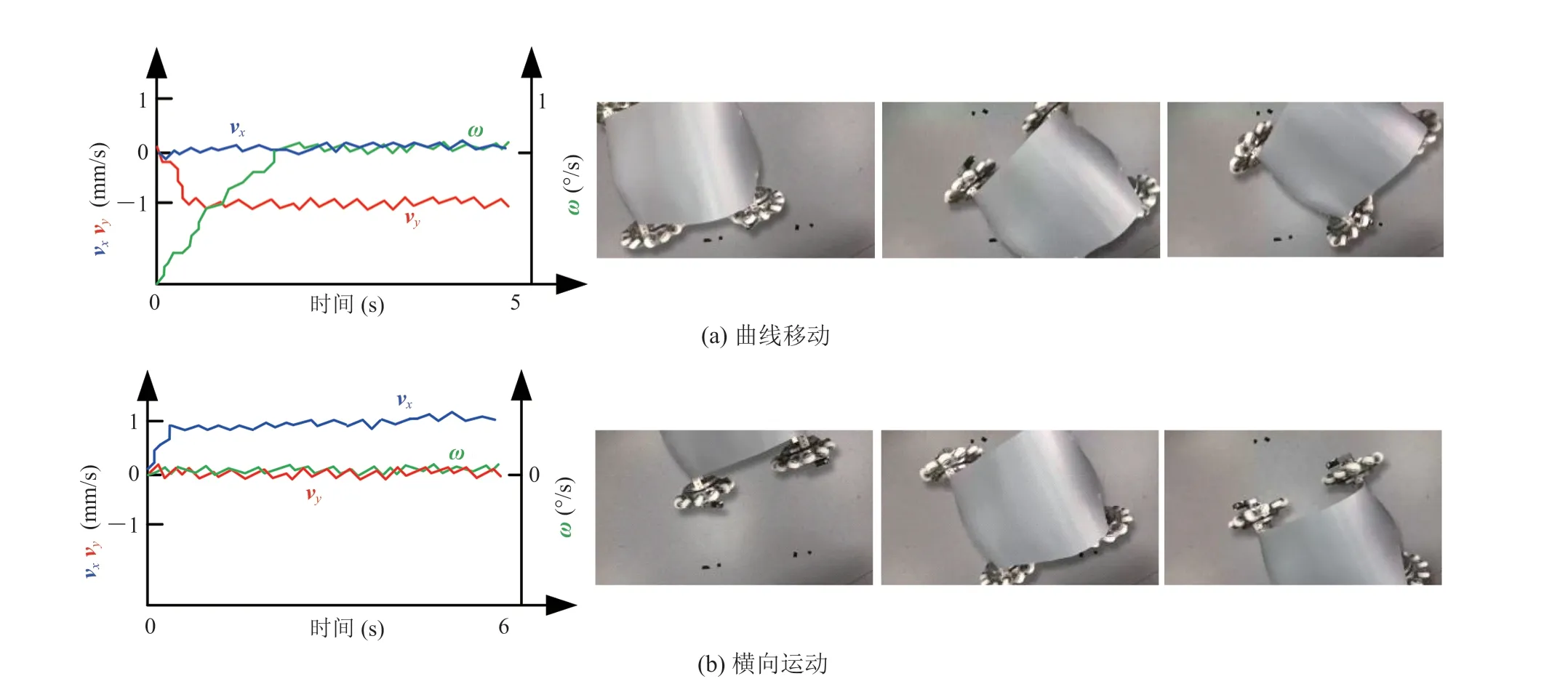
图19 不同运动形式下样机速度变化和机器人的运动过程Fig. 19 Velocity variation and motion process of the prototype under different locomotions
6 结 论
千百年来,轮子的出现极大地促进了社会的生产和进步。从古代的木质车轮到现代被广泛应用的橡胶车轮,轮子已经成为各种交通工具不可或缺的部分。轮子同样在机器人中扮演着重要角色,作为机器人实现快速移动的核心构件,轮子发挥着重要作用。但简单轮子存在越障能力低下、不能爬升倾斜角度较大的壁面和移动方向单一等缺点,其使用场景被限制在平坦的水平地面。为了广泛探索轮子在各种应用场景中的可能性,各国学者从几何形态、吸附方式和转向方式等角度对轮子进行了深入研究,研发出变形轮、吸附轮、全向轮等多种类型的轮子,极大地拓展了轮子的应用场景。
本文对轮子结构与轮式机器人的移动机理作了简要分析,针对崎岖地形翻越、垂立壁面爬升、地面全向移动等场景要求,对变形轮式攀爬移动机器人、磁吸附轮式垂直壁面行驶机器人和变参数轮式全向移动机器人进行了讨论。
针对大多数变形轮设计无法双向越障的缺点,本文提出一种三模式变形轮机器人,通过平面四连杆机构,使机器人实现了在圆轮模式、爪模式和勾模式之间的切换。相关实验结果表明,该机器人能够在爪、勾两种模式下越过两倍轮子半径高度的障碍物。
针对大多数爬壁机器人无法适应壁面形状的情况,本文提出一种具有被动式悬架和固定式磁吸附机构的爬壁机器人。被动式悬架具有 3 个被动自由度,可在磁轮吸附的作用下被动贴合地形,以适应壁面形状,平衡各个轮子的受力。磁轮中的磁铁与电机固连,不随轮子转动,可保证轮子的轻量化和磁吸附力的稳定性。相关实验结果表明,该机器人能够沿壁面灵活运动,并能够跨越高度为 3.5 mm 和 5.5 mm 的焊缝。
大多数全向轮机器人无法根据环境改变辊子的安装角,针对该不足,本文提出一种变角全向轮的设计方案,采用空间 RSSR 机构作为辐射式联动机构,建立运动学模型,并对其尺寸参数进行优化。相关实验结果表明,该机器人能够调节辊子安装角,还可根据给定的运动形式实现稳定的全向移动。
致 谢
感谢徐琪玮、王旭、何明达、刘洋洋、张子辰在样机研制和调试中所作的贡献!