兼顾多动作与轻量化的仿生假肢手设计创成
2022-07-26景晓蓓矢吹佳子東郷俊太横井浩史李光林
雍 旭 景晓蓓 矢吹佳子 東郷俊太 横井浩史 李光林
1(中国科学院深圳先进技术研究院 深圳 518055)2(日本国立电气通信大学 东京 1828585)
1 引 言
手是人类重要的器官之一,由于事故、疾病等原因导致整个手部以及部分前臂截肢,会给人在工作、生活方面带来巨大的障碍。截至 2010年底,我国各类残疾人数达 8 502 万,占全国总人口的 6.2%,其中,肢体残疾占残疾人数的29.07%,占比最高,约 2 472 万人[1-2]。在肢体残疾的人群中,约 930 万人对假肢有切实需求,但目前我国假肢普及率仅有 9.5% 左右[3]。此外,一些截肢者存在不同程度的自卑等心理健康问题,易诱发抑郁症[4]。
近年来,针对截肢患者运动功能缺失的问题,通过提取截肢者肌肉电信号来直觉操作智能假肢手的研究取得了长足进步。近年来,国内外有许多关于智能假肢手的研究[5-11],均在Nature、Science子刊等国际顶级期刊上发表。例如,如图 1 所示,Gu 等[5]所研发软体假肢手,Laffranchi 等[6]研发的肌驱动假肢手;还有许多假肢手产品已进行商业化生产,如图 2 所示。
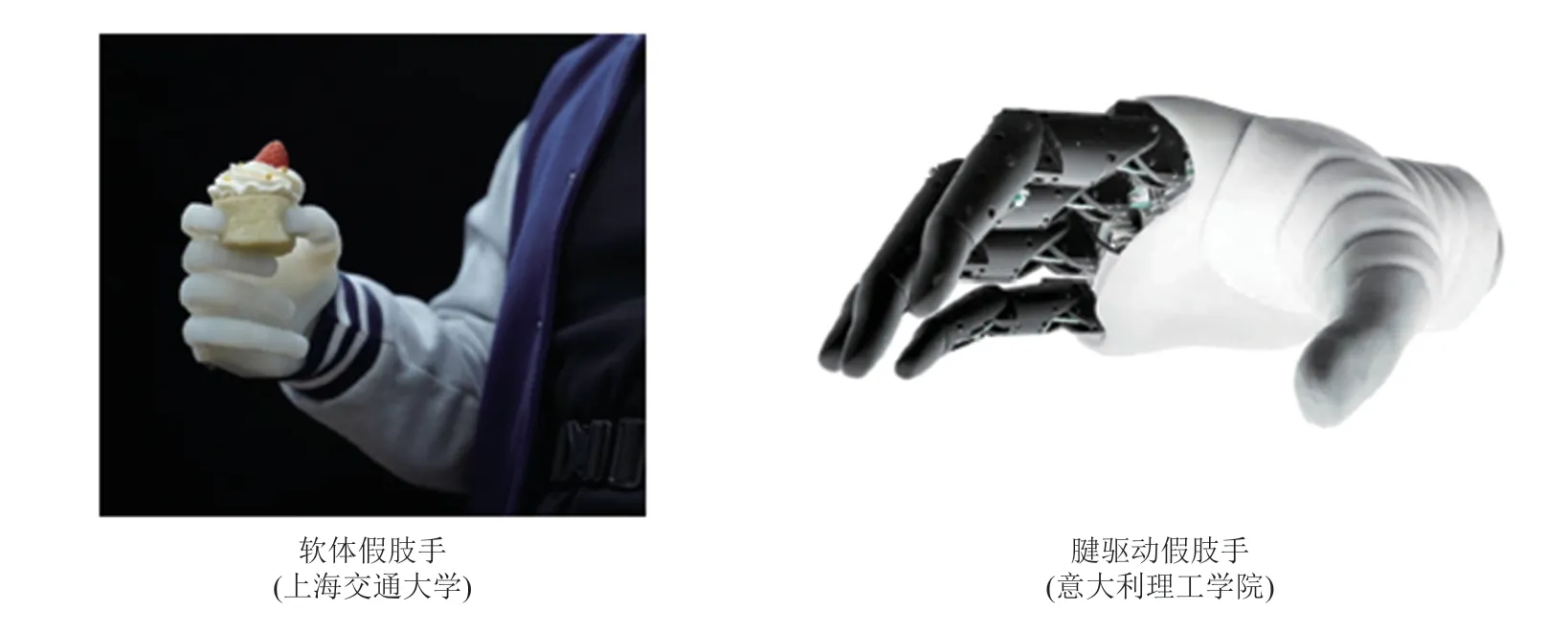
图1 国内外代表性假肢手研究[5-6]Fig. 1 Representative research on prosthetic hands at home and abroad[5-6]

图2 知名智能假肢手产品Fig. 2 Famous smart prosthetic hand products
理想的智能假肢手除了应拥有高接受度的仿生外形外,还应具备完成日常生活抓取任务的多动作功能,以及可长时间穿戴而不易产生肌肉疲劳的轻量化性能。然而,追求多动作势必增加电机数量,这与假肢手的轻量化产生矛盾。目前,假肢手的研究分成了两个方向:(1)重视动作数量,通过增加电机数量有效地增加抓取动作数,代价是假肢手的重量增加,穿戴者易产生肌肉疲劳,不利于长时间穿戴;(2)追求轻量化,采用轻量化设计的同时尽可能地削减电机数量,从而减小假肢手的重量,但假肢手可实现的动作数较少,难以完成日常抓取任务,穿戴者放弃穿戴率升高。
根据使用场景和目的的不同,手的动作被归纳出多种分类方法[12-13],其中,根据动作使用频率分类,日常抓取动作有 16 种[14-16](图 3)。截肢者长时间穿戴的假肢手的理想质量应限制在 370 g以下[17],基于此标准,对目前主流的商用假肢手进行对比,结果如图 4 所示。由图 4 可知,在多动作与轻量化[18-20]的矛盾关系中,鲜有取得较好平衡的假肢手。因此,本研究以取得平衡性为目标,通过使用尽可能少的电机融合多个机能,来实现尽可能多的动作数。本研究设计的假肢手的最终性能结果如图 4 中的红点所示:(1)仅利用 3 部电机就可实现 16 种抓取动作中的 11 种;(2)整手总质量仅 132.1 g;(3)具备拟人的仿生外观,且电机全部整合进手掌内,实现了整手模块化。

图3 日常生活中的 16 种动作[16]Fig. 3 16 movements in daily life[16]
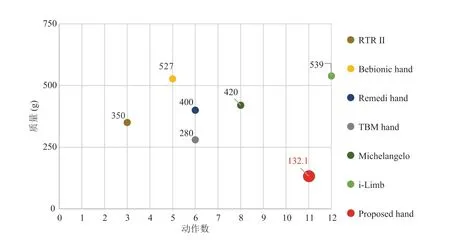
图4 与主流商用手的对比结果Fig. 4 Comparison with mainstream commercial prosthetic hand
本文将在第 2 节对 16 种动作按手指活动关节进行拆解,并按功能重新分类;第 3 节阐述拇指、四指以及掌骨的设计;第 4 节描述所采用的控制方法;第 5 节叙述抓取实验。
2 日常 16 种动作的功能性归类
人体手指关节共有 22 个自由度,其中,拇指的近指节(Carpometacarpal Joint,CM)关节有屈曲/伸展和内旋/外旋 2 个自由度,而近指节(Metacarpophalangeal Joint,MP)和远指节(Interphalangeal Joint,IP)关节仅有屈曲/伸展 1个自由度;四指的远指节(Distal Interphalangeal Joint,DIP)和中指节(Proximal Interphalangeal Joint,PIP)关节也仅有屈曲/伸展 1 个自由度,而MP 关节有屈曲/伸展和内收/外展共 2 个自由度;此外,无名指和小拇指对应的掌骨 CM 关节都有屈曲/伸展 1 个自由度[21]。
按照功能性分类,可将图 3 中的 16 种动作分为:明确力量抓握 7 种、精密捏取 7 种、侧面夹持 1 种、手部展开 1 种。有别于拇指和掌骨的运动,食指、中指、无名指和小拇指组成的四指在同一个冠状面上且运动方式一致。因此,可按手指活动关节先划分出四指区域、拇指区域和掌骨区域,然后按照其功能进行分类,分类结果如表 1 所示。
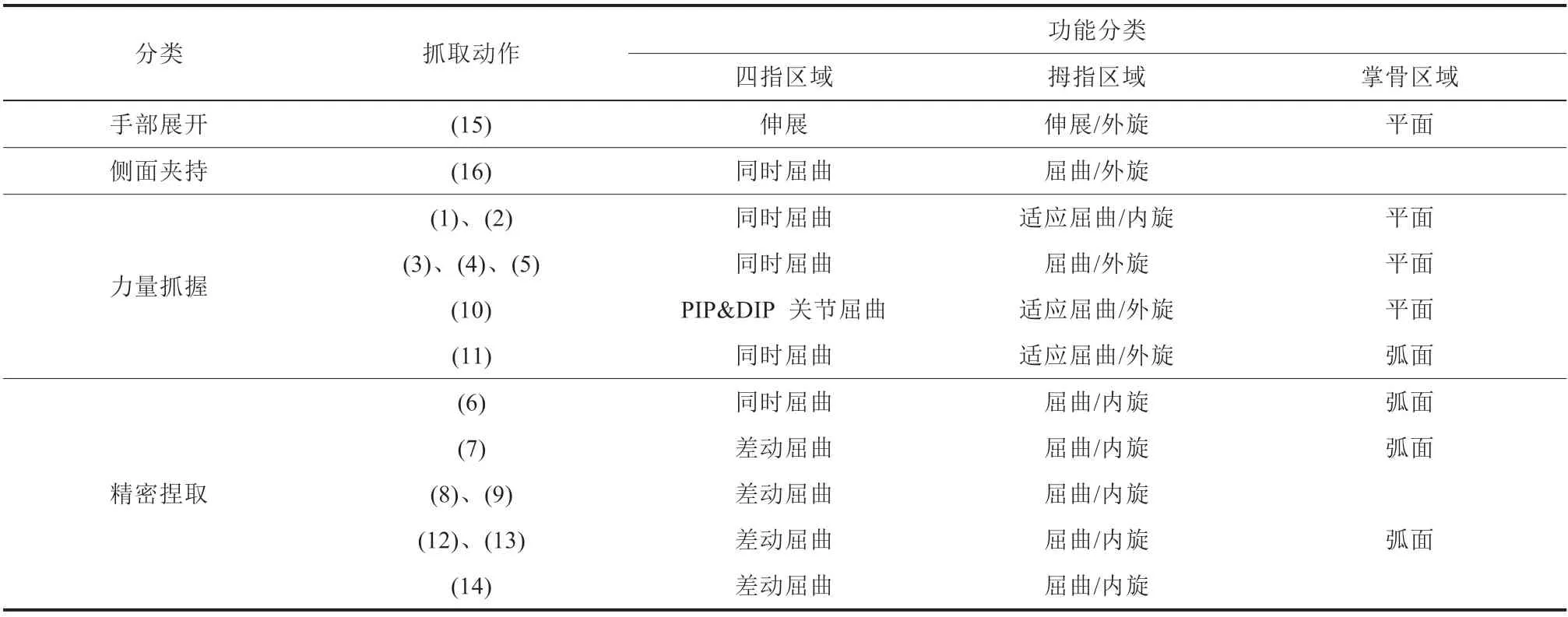
表1 16 种动作的手指功能性分类Table 1 Finger functional classification of 16 movements
四指区域:每个手指的 3 个关节发生 14 次同时屈曲;当 MP 关节为伸展状态时,PIP 和DIP 关节仅发生 1 次屈曲(碟形包裹);3 个关节保持共同伸展为 1 次(平面支撑)。针对四指整体而言,各个手指屈曲程度不一形成的差动屈曲状态为 6 次。此外,针对 MP 关节的内收/外展,在该动作分类法中并未明确其具体用途,因此本文仅设定一定的初始外展角度,以期增大空间抓握范围。
拇指区域:3 个关节均发生 11 次屈曲,其中,适应性屈曲为 4 次。3 个关节保持共同伸展为 1 次(平面支撑)。另外,拇指与四指产生交互协同,内旋与四指对立为 9 次,外旋与四指并立为 7 次。
掌骨区域:掌骨的 2 个 CM 关节发生屈曲形成弧面,参与力量抓握 8 次,辅助精密捏取 4次。而掌骨伸展形成平面为 7 次。
基于该手指功能性分类,为平衡动作数与重量的关系,需削减假肢手中占比重最大的电机。同时结合腱绳传动,采用欠驱动的方式减小空间比,适当舍去使用频率不高的动作,配合轻量的优化设计以期达成目标。
3 假肢手的设计
根据第 2 节中的手指功能性分类,本研究使用了 3 部具有紧凑外形、大扭矩且轻量的电机(产品名称:Atlas Digital Servo,生产厂商:Hyperion,产地:中国),融合不同传动,最终实现了 16 种抓取动作中的 11 种。如图 5 所示,电机 1(产品型号:HP-DH13-FMB,质量:24.5 g,扭矩:5.5 kg·cm)驱动四指共同屈曲;电机 2 和3(产品型号:HP-DS095-FMD,质量:18.3 g,扭矩:4.5 kg·cm)则分别驱动拇指屈曲和拇指内旋/外旋。整手采用 ABS 材料 3D 打印,结合优化设计实现了假肢手所需的强度和轻量化。
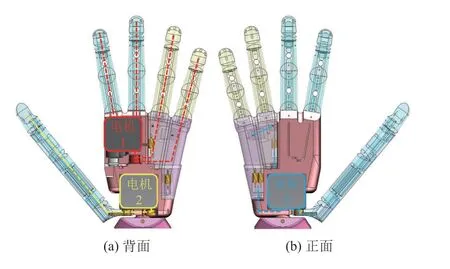
图5 假肢手总体设计图Fig. 5 The overall design of the prosthetic hand
3.1 拇指的设计
由第 2 节中的手指功能性分类可知,拇指的屈曲/伸展和内旋/外旋的使用频率最高。此外,拇指除了在空间位置上与四指相对立而发生抓取交互以外,还在四指的侧面位置,可与四指完成侧面夹持,在抓取物体时,还需考虑与物体外形的吻合,因此,在拇指设计中需加入适应性抓取功能。故本文采用腱绳穿过 CM、MP 和 IP 关节的屈曲侧,以实现 3 个关节的共同屈曲(如图 5(b)中拇指部分),而共同伸展则通过将弹簧安装于各个关节的伸展侧来实现。结合关节质量比的弹簧劲度系数,代入公式(1)计算得到拇指 3 个关节共同屈曲的近似曲线,如图 6 所示。
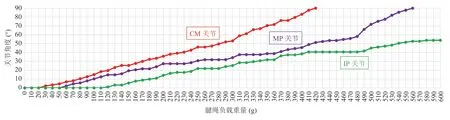
图6 拇指 3 个关节的屈曲角度关系Fig. 6 Flexion angle relation of three joints of thumb
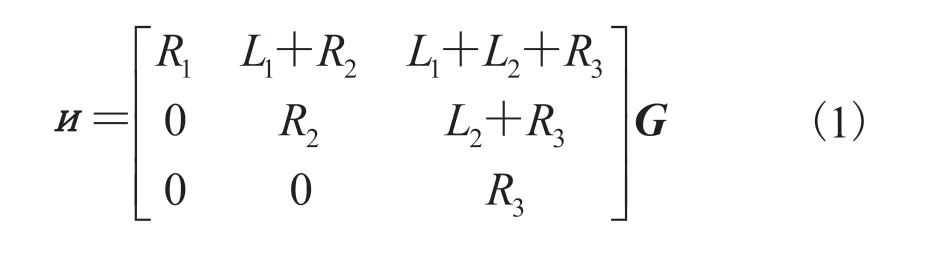
其中, 为关节伸展力矩;G为关节重力;Li为关节长度;Ri为关节回转中心;i=1, 2, 3 依次代表拇指的近指节、中指节和远指节。CM 关节的回转有别于屈曲,因此可利用电机直接驱动来实现内旋/外旋。本研究设计的拇指如图 7 所示,对该传动方式的抓取适应性进行测试,测试过程中发现,当某个关节被阻挡后,剩余的关节仍可继续运动。因此,该传动方式可以吻合物体外形实现适应性抓取。

图7 拇指的适应性屈曲Fig. 7 Adaptive flexion of the thumb
3.2 四指的设计
在日常生活中,四指的各个关节同时屈曲是使用频率最高的,且四指在精密捏取中起到重要作用,因此,为获得 DIP 关节准确的运动轨迹,采用如图 8 所示的传动方式。当红色腱绳被拉动时,MP 关节开始屈曲,同时绿色腱绳会被动地拉动 PIP 关节屈曲,进而使蓝色腱绳被动拉动DIP 关节屈曲。
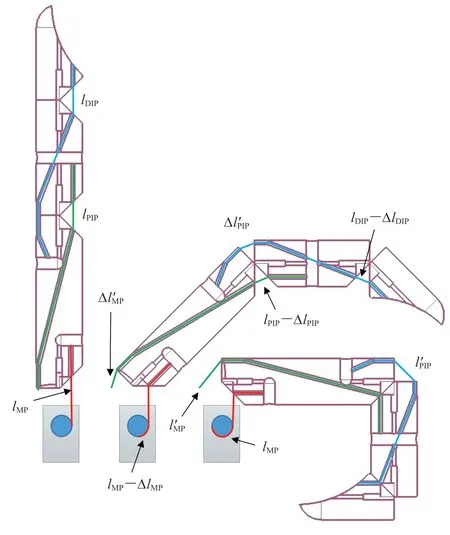
图8 四指的传动方式Fig. 8 Mechanism of the fingers
由于绿色和蓝色腱绳定长,且与之对应的伸展侧和屈曲侧露出部分的变化量存在如公式(2)所示的关系,因此,绿色、蓝色与红色腱绳成比例共同运动,进而实现了 3 个关节的变化角度相同(公式(3))。
其中,各个关节处对应的腱绳行程长度分别表示为:lMP,lPIP,lDIP。此外,由于四指伸展侧的部分空间被驱动腱绳所占用,无法在每个关节都安装弹簧,因此,本研究采用拉伸量更高的弹性带贯穿 3 个关节,作为被动伸展使用。本研究建立的力学模型如图 9 所示,相应的能量关系如公式(4)所示,进而推得力学关系式(公式(5)),由此可计算四指中各个手指所需的弹性带劲度系数。
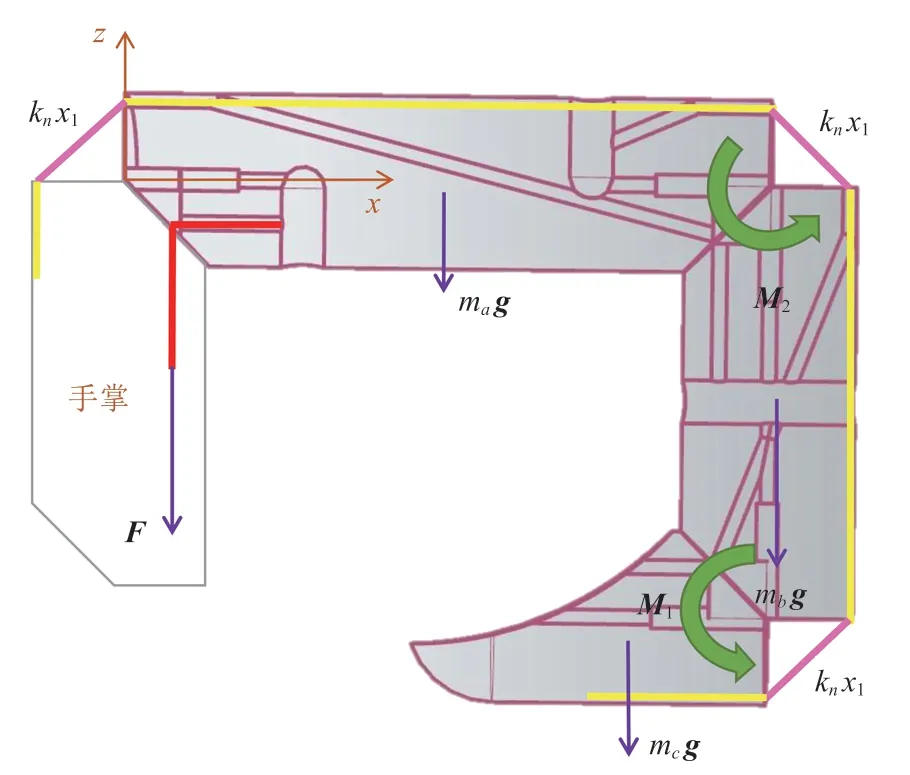
图9 四指的力学模型Fig. 9 The mechanics model of the fingers
其中,W为功率;m为质量;g为重力加速度;k为弹簧劲度系数;x1为弹簧伸长量;x0为弹簧原长;n=a,b,c依次代表四指的近指节、中指节和远指节。
3.3 掌骨的设计
根据抓取任务的不同,掌骨会形成弧面或平面,若抓取物体是球状,掌骨会形成弧面对物体进行包裹以稳定抓握;当抓取棒状物体时,则会形成平面来适应物体外形。根据上述分析可知,两者发生频率相近,具有相同的重要性,因此,本研究采用对称弹性串联驱动(Series Elastic Actuator,SEA)的传动方式实现其功能,且达到了无动力自动切换掌骨形成弧面或平面[22]的效果。
如图 10 所示,在无名指与小指的掌骨伸展侧和屈曲侧分别设置两对弹簧,形成两组弹性串联驱动单元,并联动拇指 CM 回转关节。由能量守恒定律(公式(6))可推导掌骨屈曲/伸展两侧所需弹簧的劲度系数,如公式(7)所示。
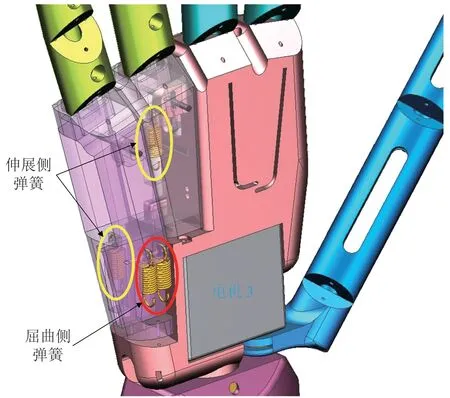
图10 对称弹性串联驱动式传动在掌骨中的设置Fig. 10 The configuration of symmetrical SEA drive in metacarpal bone
如图 11(a)所示,当拇指开始内旋时,联动小指 CM 关节屈曲至 10°,由于屈曲侧的 2 个弹簧是并联的,因此伸展侧弹簧的伸长量大于屈曲侧。如图 11(b)所示,拇指继续内旋,联动小指 CM 关节屈曲至极限 15°[23],小指 CM 关节又联动无名指 CM 关节屈曲至 10°[23]。此时,小指CM 关节伸展侧弹簧的伸长量达到最大,屈曲侧则由于平衡无名指 CM 关节伸展侧的弹簧力而被继续拉伸,直至两个掌骨的两侧达到力平衡。当两个掌骨都达到屈曲的极限时,拇指仍可继续内旋至极限 90°,因此,小指 CM 关节屈曲侧弹簧还会持续被拉伸,给球状物体提供包裹力。当抓握棒状物体时,如图 11(c)所示,由拇指的屈曲产生向掌骨的压力,进而掌骨会逐渐被压回至平面状态,小指 CM 关节屈曲侧的弹簧会被拉伸至最长,而两个掌骨的伸展侧弹簧则恢复至原始状态。
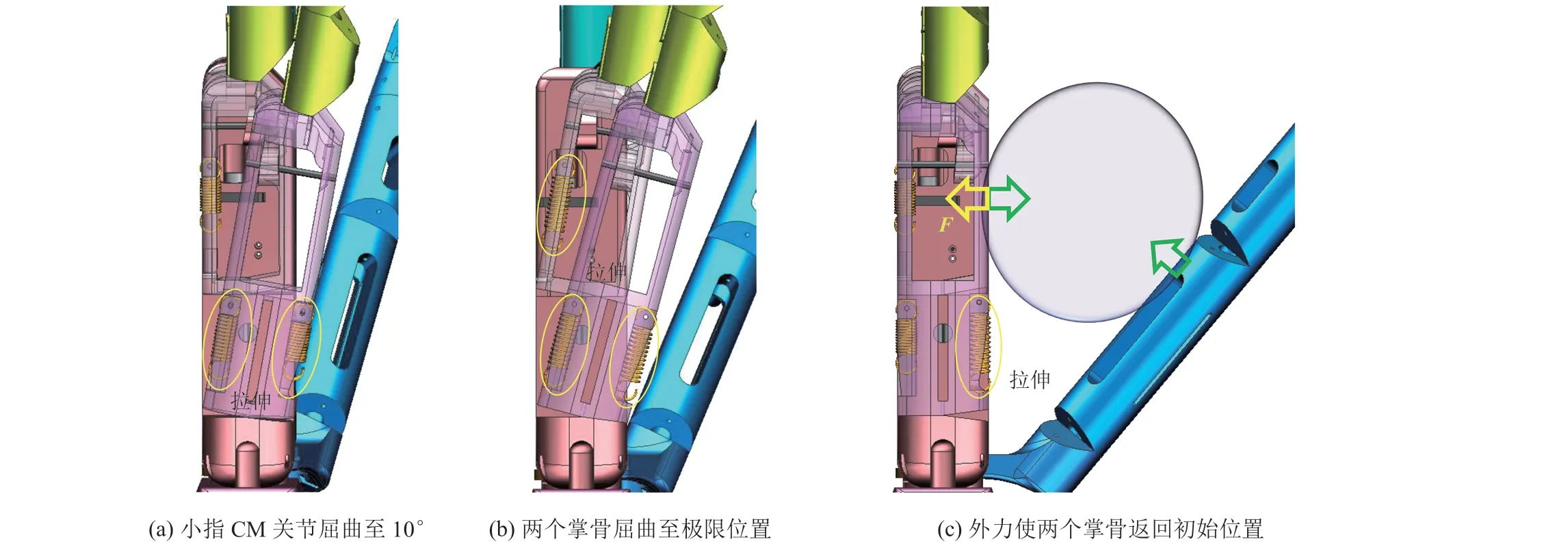
图11 对称 SEA 传动所实现的效果Fig. 11 The effect achieved by symmetrical SEA drive
4 假肢手的控制
为更好地凭直觉控制假肢手并提高抓取精度,本研究利用肌电信号,结合神经网络算法,实现了在线多个动作的分类、识别与实现[24]。如图 12 所示,将 3 个肌电传感器贴在前臂肌肉表面,对肌电信号进行采集。肌电信号经 AD620的 Amp 电路采集后放大,通过下位机(产品名称:SH72544R,生产厂商:Renesas Electronics Corporation,产地:日本)的 A/D 转换为 2 kHz的数字信号,并使用 50 Hz 的二阶 IIR 高通滤波器降噪,将离散数据变为全波整流数据。然后通过高速傅里叶变换,提取 8 个特征向量,并将这些特征向量作为训练数据输入人工神经网络算法,该人工神经网络算法包含输入层、中间层和输出层 3 层。在输入层,对应 8 个特征向量,建立 8 个神经元;在中间层,本研究将神经元数量设置为 3×8=24 个;在输出层,分类并识别 8个动作模式(四指的屈曲/伸展,拇指的屈曲/伸展和内旋/外旋,以及五指的放松和保持)。此外,控制器还根据过去 10 次的动作和当前结果进行对比,调整最终的动作结果,以确保假肢手的稳定性,最终在线精度高达 96%。基于该识别结果,向电机发送相应的数据,让电机带动假肢手生成动作。

图12 假肢手控制流程图[22]Fig. 12 Flow chart of prosthetic hand control[22]
5 实验评价
为客观评价本研究设计的假肢手是否达到预期效果,本文对其相关性能进行了验证。首先,加工并组装该假肢手,确认其最终质量为 132.1 g(如图 13 所示),实现了 370 g 以下的轻量化目标。其次,本研究进行了抓取/放置实验,确认假肢手对日常的形状规则与不规则物品抓取成功率。最后,确认假肢手可实现 16 种日常动作中的 11 种。
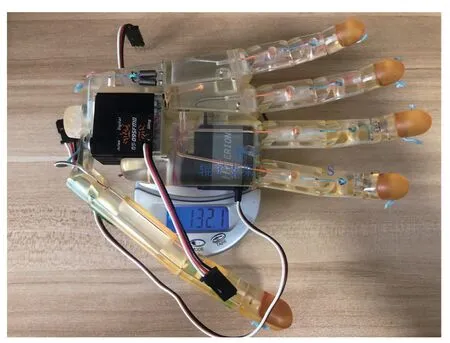
图13 整手称重照片Fig. 13 Whole hand weighing photos
5.1 动作验证实验
为测评本文设计的假肢手可实现 16 种日常动作中的几种,本文进行了动作验证实验。实验中仅控制电机带动手指运动,若手指按照设计的运动学轨迹运动,那么会稳定抓握住对应的物品。由图 14 中的实验结果可知,本文设计的假肢手成功实现了 11 种动作。

图14 实现的 11 种日常动作Fig. 14 The realization of 11 movements
5.2 抓取/放置实验
为测试假肢手的抓握稳定性和操作性,让 5位健康人利用肌电信号进行直觉控制抓取/放置实验。如图 15 所示,受试者穿戴前臂支架,假肢手安装于支架前端(为了仿生人手部皮肤的柔软及摩擦性质,假肢手外部穿戴有仿生皮肤手套[23]),自主操控假肢手进行抓取实验。

图15 实验装备Fig. 15 The experiment equipment
在实验桌面上标记 15 mm×15 mm 的 A、B两区域,将如图 16 所示的日常生活用品逐一放置于 A 区域进行测试,受试者在 30 s 内将物品从A 点搬至 B 点,再从 B 点重新搬回至 A 点放下,如此反复记录成功次数,在搬运途中不发生滑落或失稳掉落则记一次成功,统计成功次数。
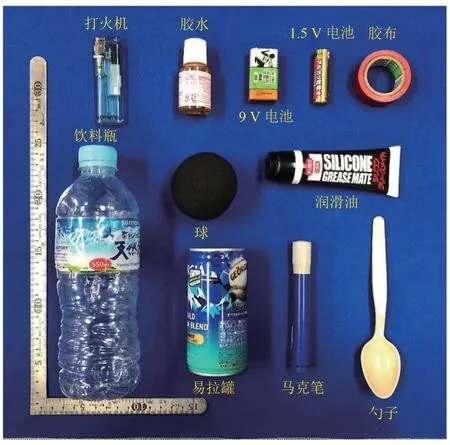
图16 实验对象物品Fig. 16 Experimental objects
5 位健康人的平均实验结果如图 17 所示,假肢手在力量抓握(如饮料瓶、易拉罐和球等)中表现良好,在规定时间内成功率较高;在精密捏取(如打火机和 1.5 V 电池)中,由于需要调整指尖进行抓取,与力量抓握相比,耗时较长,因此在规定时间内成功率较低。但就总体而言,该假肢手对规则及不规则物品皆有一定的适应性,且实验过程中并未出现全部失败(0 次成功)的情况,即该假肢手并未发生完全不适应抓取某物体的情况。因此,可使假肢手穿戴者通过抓取训练熟练抓取操作,进而提高抓取效率和成功率。
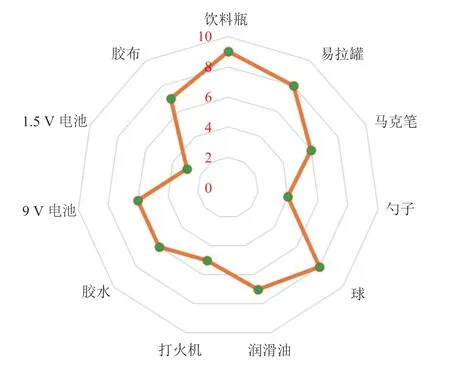
图17 抓取/放置实验的结果Fig. 17 Pick and Place experimental results
6 结 论
目前,假肢手的设计及研究主要分为两类:多自由度灵巧手和欠驱动假肢手。灵巧手的特点在于其电机、传感器数量较多,因此能模拟人手的多自由度运动。然而,它存在质量大、结构复杂、价格昂贵等问题,难以在假肢康复领域得到推广和应用。欠驱动假肢手的设计则从肢体残缺患者的实际需求出发,采用少电机、紧凑传动等方法,力求减轻重量,以方便患者在日常生活中佩戴及使用。但该类型的假肢手往往自由度不高,难以同多自由度灵巧手一样具有多种动作功能。
针对上述问题,本文提出一种新型的假肢手,平衡了动作数量和轻量化之间的矛盾关系,用 3 部电机达到了 132.1 g 的轻量化,同时实现了 16 种日常动作中的 11 种。其次,在对不同手指的高频使用动作中,本研究有针对性地加入了相应的传动方式,并在掌骨中实现了弧面和平面传动方式的自动切换,以保证手掌在力量抓握中的稳定性。此外,在假肢手外部穿戴有仿生皮肤手套,使其更加拟人的同时,增加了抓握的摩擦力。最后,通过相关实验验证了该假肢手的抓取效果,达到了本文的设计初衷和研究目的。
本文设计的假肢手,其四指采用的传动方式具备良好的稳定性,可以计算得到该假肢手在空间中的任意位置,无需配置传感器反馈位置信息[25]。此外,该传动方式的效率高,仅需 1 个关节的行程量便可使 3 个关节同时屈曲,比传统 3 个关节的行程量减少了 2/3[26]。但该传动过程的轨迹是固定的,因此,假肢手在抓取不同形状的物体时缺少自适应性。
拇指采用的传动方式令假肢手具备较好的自适应性[27],但该传动方式会因所处的空间位置不同,而容易受重力的影响,使其运动轨迹发生不可预估的改变,可能会造成抓取失败,在抓取/放置实验中,导致对部分物品的抓取失败率较高。
由于手掌产生的弧面增加了接触面积,进而增加了摩擦力,产生了稳定的效果,因此掌骨在抓握的稳定性中发挥了不可或缺的作用,特别是球形物体。相较于其他的研究工作[28],仅以小拇指的 CM 关节活动为主,无名指的 CM 关节仍是不可运动的,且小拇指 CM 关节需要电机主动驱动,不仅增重且耗能较大,而本研究实现了无动力联动小拇指和无名指 CM 关节,所产生的弧面效果具有良好的表现。
该假肢手仍存在需要改进的部分,如抓握力不足,需要增加新的传动方式以期实现更多的日常动作等。接下来的研究工作将会针对这些不足点进行改良。