具有壁面自适应能力的磁吸附爬壁机器人设计
2022-07-26陈建坤方海涛
陈建坤 何 凯 方海涛
1(中国科学院深圳先进技术研究院 深圳 518055)2(中国科学院大学 北京 100049)
1 引 言
长期航行的船舶,由于经常处于恶劣的水上环境,其货舱表面会大面积腐蚀掉漆生锈,这些锈蚀会对货舱内的货物产生污染[1],因此,当货船停靠码头更换装载货物时,特别是当装载货物为粮食等干净货物时,每次都需要对货舱进行大规模清洗,清洗的任务量较大[2]。目前,货舱清洗主要的操作方式为工人手持清洗工具进行高空作业清洗,这种方式危险系数大;此外,多数船厂为保证清洗的质量和效果,大量使用化学品,据统计,一个船厂每年用于清洗货舱的化学品可达 30 万吨[3],造成了严重的环境污染。为改善当前货舱清洗的状况,解决方法之一是研制用于舱内清洗的爬壁机器人[4],以此来实现自动化清洗作业。
目前,在船舶清洗领域,爬壁机器人主要分为两种:履带式和轮式[5]。履带式爬壁机器人由于具有良好的壁面适应性和高负载能力等优点,被广泛应用于船舶上大型表面的清洗作业中[6]。丁问司等[7]研制了一款永磁吸附式船舶爬壁机器人,该履带机器人设计有辅助吸附和从动浮动功能的永磁万向轮机构,极大地提高了机器人的负载和越障能力,但该机器人存在转向不灵活的缺点。王明强等[8]设计了一款多履带全向爬壁机器人,解决了履带式机器人转向效率低的问题,其利用 4 条履带和履带上的单向轮实现了机器人精准转动,但该机器人重量较大,在进行船舶现场作业时,安装拆卸维护较困难。针对现有爬壁机器人曲面适应困难的问题,Wang 等[9]为现有的履带式磁吸附爬壁机器人的行走机构设计了两个四自由度的铰接机构,使机器人可在更小曲率的壁面上行走,曲面适应性较好。但是,当增加了多自由度的铰接机构后,给机器人壁面行走的控制增添了困难,难以实现对机器人位置的精确控制。与履带式爬壁机器人相比,轮式爬壁机器人有着重量轻便、运动灵活、安装维护方便等优势。宋伟等[10]研制了一款磁吸附爬壁机器人,通过优化磁吸附组件提高了轮式爬壁机器人的磁质比和负载能力,但目前该机器人仅适用在船舶均匀壁面上行走,曲面行走或者越障能力不足。姜爱民等[11]研制的一种双关节轮式机器人具有壁面过渡能力,可以跨越壁面上大型障碍物,但其控制难度高,难以达到工业上要求的控制稳定性能。为了提高轮式爬壁机器人的壁面适应性,姜勇等[12]设计了一种两轮过渡爬壁机器人,该爬壁机器人采用两足轮式混合运动机构,能够在两个具有一定夹角甚至垂直的壁面之间移动,但该机器人负载能力不足,无法搭载船用清洗设备完成船舶壁面的清洗作业。
船舶货舱内部壁面多为交叉壁面,交叉壁面之间存在过渡角,这就要求爬壁机器人具有壁面过渡能力。本文根据轮式磁吸附爬壁机器人行走灵活的优势,优化了现有的磁吸附机构,同时提高了清洗机构对壁面的适应能力,设计出一种壁面自适应爬壁机器人,并通过实验验证了该机器人在船舱壁面上运动的可行性,实现了船舶货舱的绿色、高效、安全清洗。
2 爬壁机器人整机设计
散货船舱内部壁面不均匀,且各个舱壁之间成一定角度,最小夹角可达 120°[13]。图 1 为散货船舱内部结构,其主要包括底边舱斜板、舷侧竖板、顶边舱斜板、舱口围板和舷侧肋板等结构。船舶外壁表面分布一致,但货舱内部各个壁面结构较为复杂,各壁面连续性较低,这给利用机器人实现货舱内自动化清洗带来了挑战。针对该问题,本文研制了一种可搭载清洗设备完成货舱内多壁面的过渡行走过程的爬壁机器人,主要包括从底边舱斜板过渡到舷侧竖板,从舷侧竖板过渡到顶边舱斜板。通过机器人在货舱内多壁面的过渡行走,可使单个机器人最大程度地完成舱内大面积壁面的清洗。
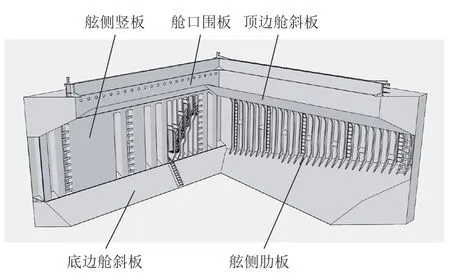
图1 散货船舱内部结构图Fig. 1 Structure of cargo hold
本文设计的壁面自适应爬壁机器人的整机结构如图 2 所示,其包括行走机构、前后端磁吸附机构、自适应清洗机构和控制箱。机器人的行走机构(分为左右两个行走机构)利用电机和减速器所产生的强大驱动力带动橡胶轮转动,来完成机器人行走,机器人的转向则是利用左右两个行走机构的速度差来完成的。在该机器人结构中有一种特殊的弧形磁吸附机构,安装于两个行走机构内侧,通过该弧形磁吸附机构的磁吸附力可完成多角度壁面的过渡。同时,该磁吸附力还保障了机器人的安全,避免机器人在行走过程中出现打滑和倾覆现象。本文设计的爬壁机器人的前端搭载了一种壁面自适应清洗机构,该机构可利用高压水来清洗舱内壁面上的锈斑等附着物,且搭载了真空回收管对清洗后的废水回收处理。清洗机构上搭载的高压水管和真空回收管被束缚在管子固定器上,提高了机器人运动的稳定性。整个机构有一定的柔顺性,当遇到过渡面时,可沿着壁面夹角过渡到另一个面。机器人的控制箱安装在整机的后端,里面安装有无线通信装置,可远程遥控操作机器人。
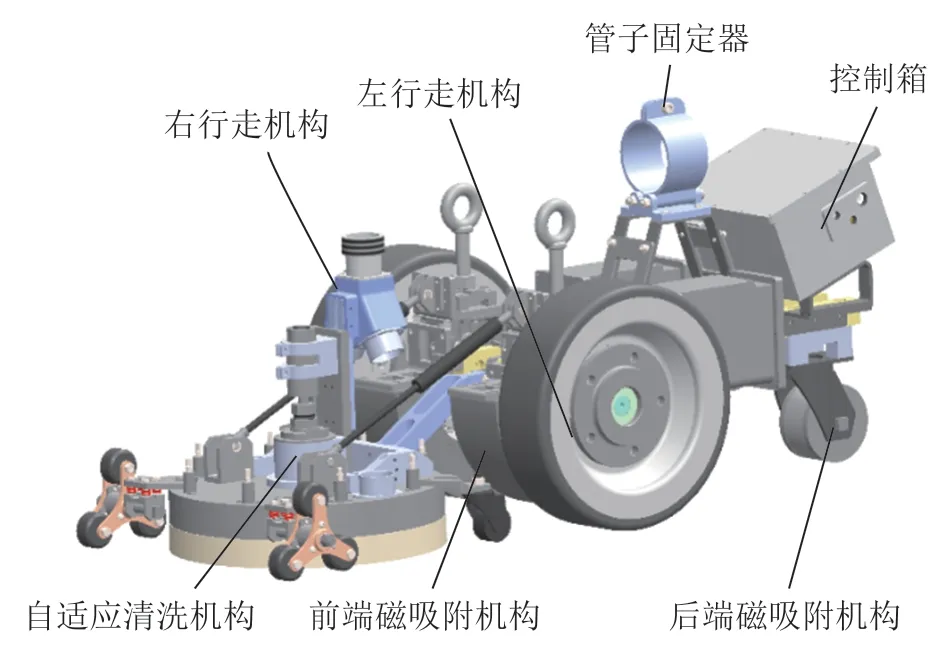
图2 机器人结构示意图Fig. 2 Structure of the robot
3 磁吸附机构设计与仿真
3.1 壁面过渡力学模型
为保证轮式爬壁机器人具有壁面过渡能力,需要调整磁吸附机构的磁力分布,特别是前端磁吸附机构。当机器人进行壁面过渡时,需要对前端过渡面有一个足够大的磁吸附力,使其获得的摩擦驱动力能够保证其完成壁面过渡。本研究的首要目标是确定该磁吸附力的力学关系,所以在机器人壁面过渡时,对其进行受力分析,分析结果如图 3 所示。其中,Fmag1是机器人对前端壁面磁吸附力,Fmag2是机器人前端磁吸附结构对底部接触面的磁吸附力,Fmag3是机器人后端磁吸附结构对底部接触面的磁吸附力,Ff1、Ff2、Ff3是机器人轮子与壁面接触处的摩擦力,FN1、FN2、FN3是机器人轮子与壁面接触处的支持力,G为机器人的重力。
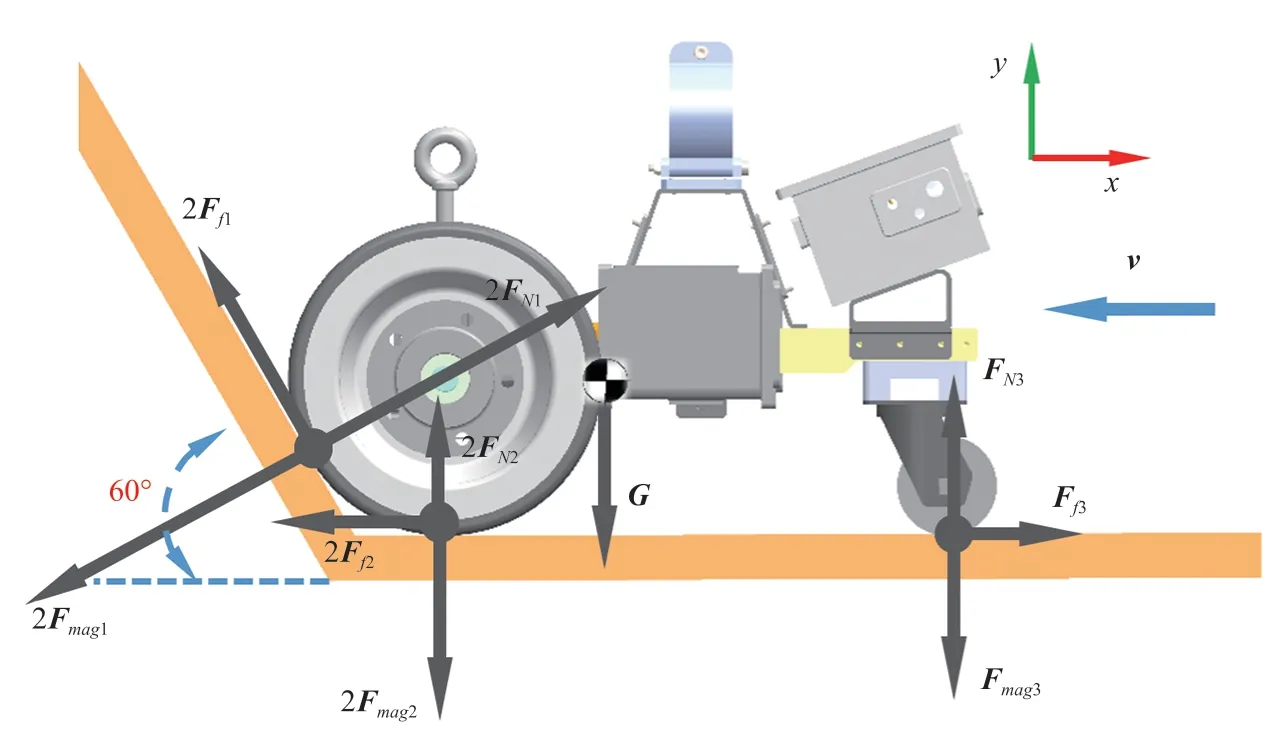
图3 机器人壁面过渡受力情况Fig. 3 Mechanical model of robot wall transition
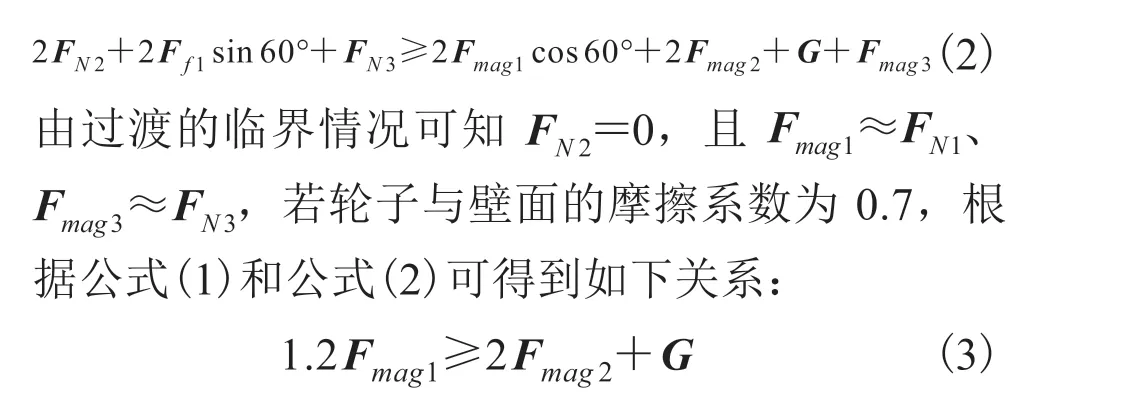
假设货舱内部壁面间的最大倾角为 60°,当机器人从舱底过渡到底边舱斜板时,Fmag1需要足够大,使其提供的摩擦力Ff1可驱动机器人过渡到另一个面,此时,需要满足的力学关系沿x轴方向为:

3.2 磁吸附机构设计
根据公式(3)中Fmag1和Fmag2之间的关系可知,前端磁吸附机构对前端过渡面的磁吸附力要远大于对底部接触面的磁吸附力,且在整个壁面过渡过程中,该力学关系稳定不变,因此,本文设计了一种弧形磁吸附机构,分别安装于左右行走机构内侧,以满足磁吸附力关系,如图 4 所示。
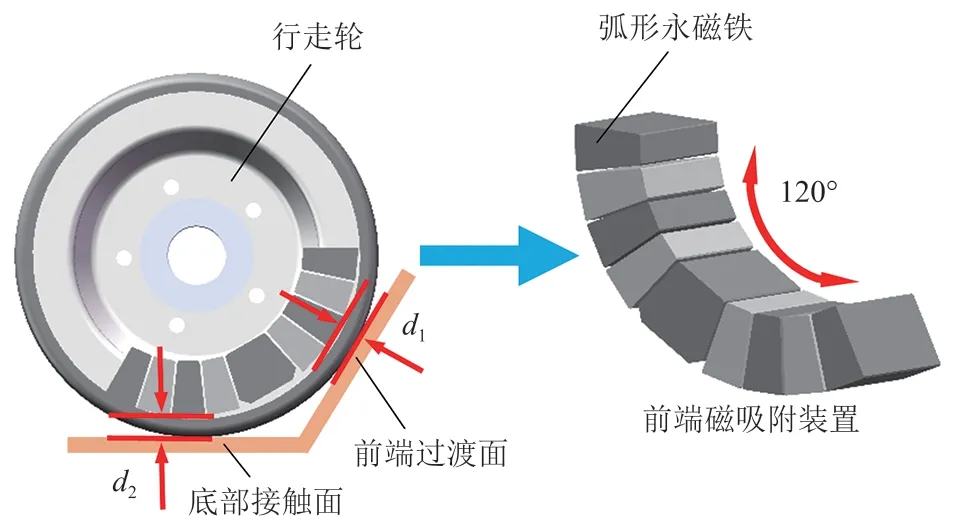
图4 前端磁吸附机构Fig. 4 Magnetic adsorption mechanism in front
该弧形磁吸附机构由 9 块钕铁硼永磁体排列组成。为使磁吸附力达到最优,即提高磁吸附力和磁铁质量的比值(磁质比),本研究利用Halbach 阵列的特点[14],将磁通密度集中于壁面接触端,极大地提高了磁能利用率。此外,该磁铁呈弧形结构,弧度设计为 120°,这样在壁面过渡过程中,该机构始终会对接触面有磁吸附力,不会发生失去磁力导致机器人坠落的情况。磁吸附力会随着磁体与壁面距离的增大而衰减,为了使机器人获得过渡能力,即满足公式(3)中磁吸附力的关系,需要确定该弧形磁铁与前端过渡面的距离d1和底部接触面的距离d2的大小。当d1<d2时,在过渡过程中,整个弧形磁吸附机构上的磁吸附力从上到下是递减的。
3.3 磁吸附机构仿真
根据 Halbach 阵列磁铁充磁方向的特点,本文列举了两种不同排列形式的磁铁阵列,并对两种排列形式在d2=8 mm 时的磁吸附力进行了仿真分析。仿真分析结果如图 5 所示,其中,图 5(a)为磁铁底部横向充磁的排列形式,图 5(b)为磁铁底部竖向充磁的排列形式。通过仿真结果可知,第一种排列形式在壁面处的磁通密度大于第二种排列形式的磁通量密度,两种排列形式对壁面的磁吸附力Fm1=3 587 N、Fm2=3 242 N。综上所述,第一种排列形式的磁能利用率大,磁吸附性能更好,因此,本文设计的前端磁吸附机构中磁铁的充磁方向选用第一种磁铁阵列。
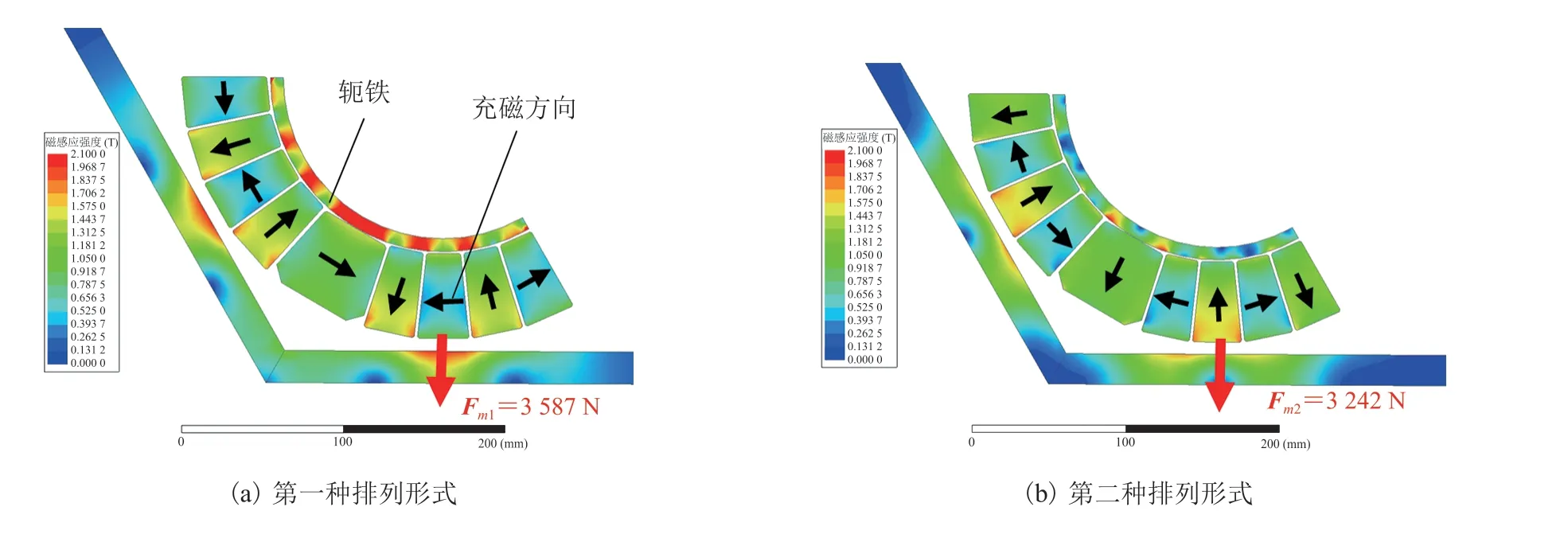
图5 两种 Halbach 阵列的仿真结果Fig. 5 Simulation results of two Halbach arrays
为确定磁吸附机构的吸附力与壁面间距d1和d2的关系,将横向充磁的磁吸附机构的吸附力进行仿真,得到Fmag1-d1和Fmag2-d2两种关系曲线,如图 6 所示。
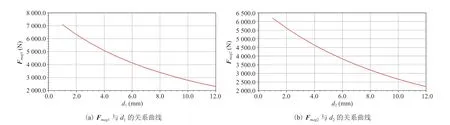
图6 磁吸附力(Fmag1, Fmag2)与壁面距离(d1, d2)的关系Fig. 6 The relationship between magnetic adsorption force (Fmag1, Fmag2) and wall distance (d1, d2)
根据机器人防倾覆和防打滑的力学模型[15],假设机器人重 100 kg,那么机器人对底部接触面的磁吸附力需满足Fmag2≥3 000 N。为保证机器人具有一定的越障能力,特别是具有跨越 6 mm高焊缝的能力,磁吸附机构与壁面间需保持一定的间距,故取d2=8.5 mm,由图 6 中曲线(b)可得此时Fmag2=3 000 N。再根据公式(3)可知,机器人对前端过渡面的磁吸附力需满足Fmag1≥5 834 N,为了满足这个关系,根据曲线(a),取d1=2.5 mm,可得Fmag1=5 987 N。综上可得,该前端磁吸附机构相对于壁面的安装位置为d1=2.5 mm,d2=8.5 mm。
4 自适应清洗机构设计
磁吸附机构的设计使得机器人本体具有了壁面过渡能力,但在实际工作过程中,机器人需要搭载清洗机构才能完成壁面清洗作业,因此,清洗机构同样需要具备壁面过渡能力。目前,船舶清洗爬壁机器人主要采用清洗盘式的清洗机构,它搭载高压清洗装置和真空回收装置,具有清洗和回收的双重功能[16]。在清洗盘式结构的基础上,本文设计的清洗机构增加一种三轮过渡机构,该机构由 3 个麦克纳姆轮各成 120°对称分布构成,可使清洗盘完成一定夹角壁面的过渡。清洗机构的末端通过转臂与机器人本体相连接,转臂可以绕着连接处转轴转动,自适应清洗机构壁面过渡的主要实现原理如图 7 所示。
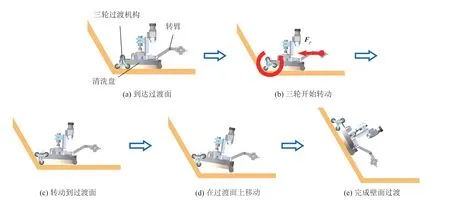
图7 自适应清洗机构壁面过渡过程Fig. 7 The wall transition process of adaptive cleaning mechanism
当清洗机构到达过渡面时,在水平推力Fp的作用下,三轮过渡机构中与过渡面接触的麦克纳姆轮会与过渡面紧密接触,另外两个麦克纳姆轮会绕着接触轮转动,然后最上面的轮子经转动后会与过渡面接触。在整个壁面过渡过程中,三轮过渡机构带动清洗盘转动了一定角度,使得推力Fp产生了一个沿过渡面方向的分力,在该力的作用下,整个清洗机构开始沿过渡面移动,最终完成壁面过渡。
为验证三轮过渡机构的可行性,本文搭建了该机构的简易模型,并进行了壁面过渡实验,如图 8 所示。实验过程中,通过给该简易模型施加一个沿行走壁面的推力,使其向过渡面运动。实验发现,三轮过渡机构可以完成过渡壁面处的转动、抬升和沿过渡面行走等动作,因此,将该三轮过渡机构搭载在清洗机构上,可使清洗机构具有一定的壁面自适应能力。

图8 三轮过渡机构实验Fig. 8 The three-wheel mechanism transition experiment
5 样机实验及结果分析
5.1 样机实验
将机器人各个模块进行装配后得到的样机如图 9 所示,其包括自适应清洗机构、磁吸附机构、行走机构等。为验证该样机的壁面过渡能力及其在船舶货舱内行走的稳定性,本文通过模拟货舱内的环境,进行了相关实验,包括底边舱行走实验、顶边舱行走实验。
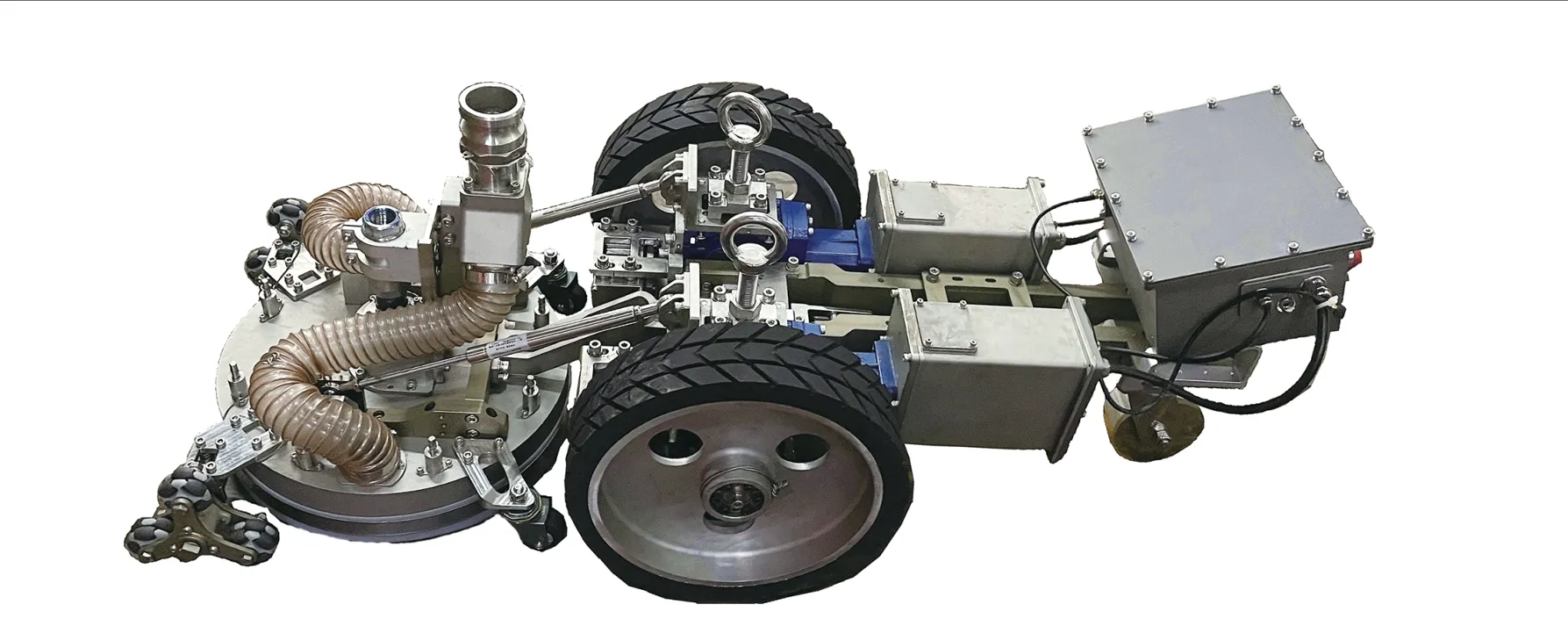
图9 机器人样机Fig. 9 Robot prototype
(1)底边舱行走实验
为模拟货舱底部的实际情况,本文搭建了一个 120° 壁面夹角的实验平台,使机器人沿着此壁面进行过渡测试,如图 10 所示。机器人从底边舱斜板以 2 m/min 的恒定速度行驶,当遇到前端过渡面时,搭载三轮过渡机构的清洗盘会沿着前端过渡面慢慢移动。在移动过程中,整个清洗机构相对于机器人本体向着过渡面方向转动。当清洗盘完全贴合过渡面时,机器人前轮刚好运动到过渡面处。此时,磁吸附机构作用于过渡面和行走底面,在磁吸附力的作用下,机器人脱离底边舱斜板开始沿着竖直过渡面行走。当后轮运动到过渡面时,机器人完成了从底边舱斜板运动到舷侧竖板的过程。

图10 底边舱行走实验Fig. 10 Cargo bottom walking experiment
(2)顶边舱行走实验
货舱内顶边舱斜面和舱顶面之间的夹角最大为 120°,为验证本文研制的爬壁机器人具有从顶边舱斜面到舱顶面的过渡能力,本实验搭建了两块夹角为 120° 的钢板,对货舱顶部的壁面特点进行模拟仿真,机器人的顶边舱行走实验过程如图 11 所示。实验过程中,机器人从顶边舱斜板开始运动,当自适应清洗机构运动到顶部过渡面时,过渡面会给清洗机构一个反作用力,此时连接机器人本体和清洗机构的伸缩推杆开始作用,伸缩推杆给清洗机构一个沿壁面法线方向的推力,避免清洗机构在壁面反作用力和自身重力的作用下倾覆。由图 11 可知,当清洗机构过渡到舱顶壁面后,整个机器人的前轮行走机构也在磁吸附机构的作用下完成了过渡动作。在整个顶边舱行走实验过程中,机器人行走稳定,未发生倾覆和脱落的情况。
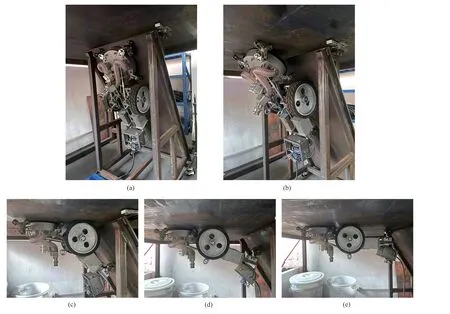
图11 顶边舱行走实验Fig. 11 Cargo top walking experiment
5.2 结果分析
针对现有爬壁机器人在船舶货舱内无法完成多壁面过渡的问题,本文研制了一种壁面自适应爬壁机器人,通过仿真分析和样机实验,验证了该爬壁机器人具有一定的壁面过渡能力。本文建立了两个实验平台——舱底实验平台和舱顶实验平台,搭建的过渡壁面夹角为 120°,通过壁面行走实验,结果表明磁吸附机构可以提供过渡所需的磁吸附力,且清洗机构中的三轮过渡机构能够完成转动、抬升和过渡等动作。综上所述,本文研制的爬壁机器人整机可以完成从舱底面到舱顶面的行走过程,满足货舱清洗的需求。
本文还对国内外相关的磁吸附爬壁机器人进行了讨论,发现有大量研究对爬壁机器人的壁面过渡能力进行了仿真分析和样机试验。与王洋等[17]研制的自适应变曲率立面的分体柔性爬壁机器人相比,本文研制的爬壁机器人不仅可以适应一定曲率的凹面和凸面,而且可以适应一定夹角的壁面,作业和应用场景更加广泛。Eto 等[18]设计的壁面自适应轮式爬壁机器人可以攀爬多角度壁面,但是与本文设计的机器人相比,该机器人磁吸附能力弱,无法搭载重量大的清洗机构。Tche等[19]针对垂直面过渡和曲面行走设计了一种磁轮式爬壁机器人——利用前后两个磁轮和辅助轮的支撑作用完成壁面过渡,该机器人的主要功能是实现各种不规则壁面的表面检测,但无法应用于货舱壁面的清洗作业,且两轮的结构稳定性较差。本文设计的磁吸附机构采用了 Halbach 阵列,与现有的甲型磁路和乙型磁路的磁铁排列[20]相比,该磁铁排列形式的磁能利用率更高。刘峰等[21]将 Halbach 阵列应用于履带式爬壁机器人的永磁吸附单元,基于传统的 Halbach 永磁体阵列,该研究在弱磁侧加入轭铁,有效地减少了弱磁侧的磁场泄漏。此外,刘峰等[21]还研究了磁体阵列的宽度、高度、厚度以及轭铁的高度对吸附力和吸附效率的影响,这为本文机器人磁吸附机构的优化提供了参考,但该永磁吸附单元只在行走底面上产生磁吸附力,无法满足壁面过渡对吸附力的要求。鉴于轮式机器人应用该磁铁阵列可很大程度减少机器人自重,安磊等[22]设计的轮式爬壁机器人采用了一种弧形磁吸附机构,本文在该磁力机构的基础上,增加了 Halbach 阵列的充磁方向并优化了磁力分布,为机器人的稳定行走提供了充足的磁吸附力,同时保证了机器人能够完成最小 120° 夹角壁面的过渡。
本文研制的壁面自适应爬壁机器人具有货舱清洗和除锈双重功能,该机器人行走稳定,且可搭载真空回收装置防止清洗后的废水污染环境,真正实现了高效、安全、绿色的清洗作业。但是,该机器人目前在应用上存在一定的局限性。首先,该机器人的壁面过渡夹角最小为 120°,无法适应更小的壁面夹角甚至垂直面;其次,该机器人主要适应的行走壁面为凹面,当在角度过小的凸面行走时,容易失去磁力导致设备脱落。后期将对机器人的磁吸附机构进一步优化,解决机器人垂直面过渡的难点,并增强机器人清洗机构的强度,提高清洗作业的效率。
6 结 论
本文通过磁力仿真分析和样机实验,对货舱清洗机器人的壁面过渡特点进行研究,设计了一种弧形磁吸附机构和自适应清洗机构。针对一般的磁吸附机构吸附力不足的缺点,本文利用ANSYS Maxwell 3D 仿真软件进行了磁力的仿真优化,优化了磁吸附机构周围的磁通量分布,使得磁吸附机构对壁面的磁吸附力满足壁面过渡的力学关系。在解决机器人本体的过渡问题后,又针对壁面清洗机构的壁面过渡,设计了一种三轮过渡机构,将该机构安装于清洗盘上,可实现壁面清洗机构对倾斜壁面有一定的自适应能力。
目前,针对爬壁机器人在船舶货舱内部多壁面过渡的问题,本文进行了相关实验,并得到了合适的解决方案,但是未进行机器人在作业现场长时间工作的实验,不能得出机器人可在作业现场进行连续工作的结论。当机器人进行清洗作业时,会产生大量的水雾,这对机器人的防水性提出了挑战。此外,本文研制的爬壁机器人主要针对舱底面、舷侧面和舱顶面大范围壁面的清洗,对于肋板侧面和货舱内的狭小区域的清洗问题还未解决,后续将会对多种壁面清洗机构进行研究,将该机构搭载在机器人上,实现多机器人协同作业,可极大提高货舱的清洗效率,真正实现船舶行业的自动化清洗作业。