数字摄影测量用于启闭机结构尺寸精密测量
2022-07-23张靖
张 靖
(上海勘测设计研究院有限公司,上海 200434)
0 引 言
苏州河河口水闸工程位于上海市北外滩苏州河与黄浦江交汇处,距离外白渡桥以东约80 m,是上海市重大工程,主要功能包括挡潮、防汛、调水,承担着苏州河流域855 km2面积内500多万人口的工农业生产和生活防汛安全,以及苏州河水系综合调水的重任。水闸金属结构设备由翻板闸门及底轴、液压启闭机、冲淤装置、闸门锁定系统及排水系统等组成。其中,闸门采用四缸液压启闭机进行操作,在左右两岸机房内双缸并联布置,液压缸为中部转铰支承结构,活塞吊头与固定于底轴端部的拐臂直接连接[1]。
水闸自建成至今运行13年,液压启闭机密封圈老化,系统内渗漏,亟待改造修复。液压启闭机是水闸的重要组成部分,经过长时间运行,其结构产生了变形,需要测量当前结构尺寸参数,为启闭机改造修复提供数据支撑。当前工业精密测量主要包括全站仪法、跟踪仪法、三维激光扫描仪法、数字摄影测量法等,由于水闸启闭机测量场地空间比较狭长,设备设施较多,且部分结构尺寸几何特征不能直接测量,为了高效率、低成本、高精度获得结构尺寸参数,最终选用以数字摄影测量为主,辅以手持三维激光扫描仪法进行结构尺寸精密测量。
数字摄影测量作为光学测量的特殊手段之一,具有非接触式、测量方式灵活、自由测站、实时三维点云测量等特性,目前已广泛应用于各类场景测量中[2]。赵文峰等利用多基线近景摄影测量技术进行边坡位移监测,通过项目实施验证了其在边坡位移监测中的可行性[3];李天子等利用近景摄影测量技术进行基坑土方计算,实验结果表明,较传统测量计算方法计算结果误差小于5%,验证了摄影测量技术在土方计算中的可行性与实用性[4];郑敏等将摄影测量技术应用于特大型蜗壳变形监测中,该方法操作简单,能够在恶劣环境中使用,实验结果表明测量精度可达毫米级[5];杨超等利用近景摄影测量技术进行耕地土壤侵蚀速率研究,实验结果表明,该方法能够准确监测地形变化,能够可靠推算土壤侵蚀速率[6];王凤艳等利用摄影测量技术测量岩体结构面空间坐标,在此基础上构建相关模型[7]。
本文以该项目为例,研究了数字摄影测量用于启闭机结构尺寸精密测量方法。首先介绍了数字摄影测量用于启闭机结构尺寸精密测量技术思路,然后介绍了数字摄影测量基本原理、测量设备、测量参数及要求、测点布置、网型设计等相关问题,通过实验验证了数字摄影测量用于启闭机结构尺寸精密测量的可行性,为后续类似项目提供了借鉴经验。
1 总体技术思路
数字摄影测量用于启闭机结构尺寸精密测量技术思路如图1所示。主要包括:现场踏勘、待测对象上粘贴测量标志点及编码标志、放置定向棒及基准尺、现场拍照测量、图像数据处理、数据建模分析等。
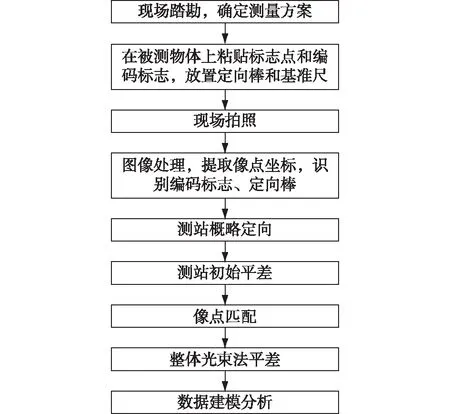
图1 数字摄影测量用于结构尺寸精密测量技术流程图
2 测量方案与施测
2.1 数字摄影测量基本原理
利用数字摄影测量技术可以快速获取观测对象三维坐标,根据摄站数目可以分为单摄站测量和多摄站测量。本文采用多摄站测量方式,原理如图2所示,从两个以上的摄站获取观测对象图像,基于共线方程原理(见公式1),对图像进行数据处理得到观测点精确X、Y、Z坐标[8-9]。
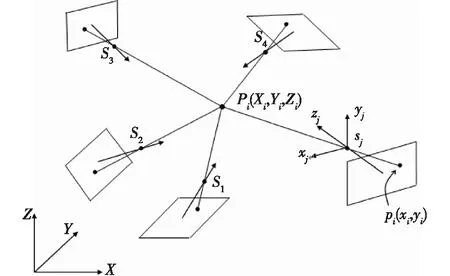
图2 数字摄影测量原理图
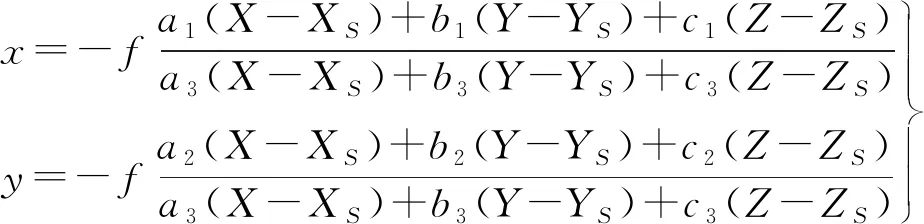
(1)
2.2 数字摄影测量设备
文章中所采用设备为一套光学三坐标测量系统,由数字量测相机、基准尺、反光标志和靶球等组成。系统以数字相机为传感器,通过数字图像处理、摄影测量相关计算等获得被测物体的高精度三维坐标。测量系统主要特点有:① 测量范围大,0~100 m;② 测量精度高,最高精度为3 um+3 um/m;③ 测量效率和自动化程度高;④ 非接触式测量;⑤ 受温度影响小,可在高低温、震动等苛刻条件下工作。
2.3 测量参数及要求
启闭机结构如图3所示,根据设计要求,测量内容包括:① 拐臂外形尺寸;② 启闭机支座最右侧一排螺栓中心线至拐臂销轴中心的水平距离L1、油缸支座顶面与拐臂销轴中心的竖直向距离L2;③ 拐臂销轴中心线与启闭机支铰中心线的夹角;④ 油缸铰支座底板尺寸、螺栓间距、同一油缸两个铰支座间距等。设计测量精度要求为0.1 mm。
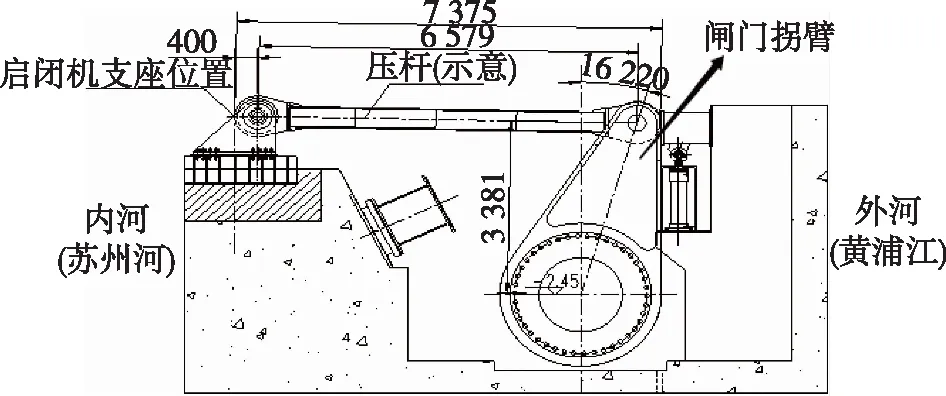
图3 启闭机结构图
2.4 测点布置
测点布置包括:标志点、编码标志、定向棒及基准尺,如图4所示。在启闭机结构特征点位置粘贴标志点,用以获取特征点空间三维坐标,点位精度可达到0.02个像素精度。在测量区域布置编码标志、定向棒及基准尺[10-11]:编码标志用于图像间的匹配拼接;定向棒上有辅助控制点用以反算图像近似外方位元素,为平差提供初始值;基准尺提供长度基准。

图4 测点布置图
2.5 摄影测量网型设计
根据已知相关文献可知,合理的摄影测量网型可以有效提高摄影测量精度,本项目中摄影测量网型设计原则[12]如下:① 每个测量标志点尽量被四个以上不同位置摄站所拍摄;② 每个测量标志点交会角尽量在60°~120°之间;③ 每个测量标志点的摄影入射角尽量小于45°;④ 每个摄站尽量拍摄所有标志,保持像片间100%重叠;如果不能,则相邻像片间尽量有较多重叠和公共点。
3 数据处理
3.1 图像数据处理
本项目共采集照片563张,利用MetroDPM数字摄影测量系统软件进行图像数据处理,主要过程包括[13-15]:① 图像导入;② 图像处理,提取图像中像点坐标,识别图像中编码标志及定向棒位置;③ 测站概略定向、平差;④ 测站间像点匹配;⑤ 整体光束法平差,精确确定测站位置以及测量点三维坐标。本项目数据精度为:测点三维坐标X、Y、Z中XRMS为0.029 9 mm,YRMS为0.037 5 mm,ZRMS为0.029 5 mm,测量精度满足设计要求。
3.2 点云数据建模分析
通过数字摄影测量技术对启闭机结构进行了拍照测量,经过图像数据处理,获取了其点云数据,如图5所示。

图5 启闭机点云数据
对点云数据进行建模分析,可计算求取相关测量参数。本文以计算拐臂销轴中心线与启闭机支铰中心线的夹角为例,介绍建模计算方法,如下:
(1)识别拐臂销轴与启闭机支铰构件相关点云数据,如图5画圈所示。
(2)利用特征点云数据进行平面拟合与投影,确定2个拐臂销轴中心点与2个启闭机支铰中心点坐标。中心点坐标计算以拐臂销轴中心为例,见图4,拐臂销轴为圆柱体,拐臂销轴中心点则为圆柱体底部圆心,求取拐臂销轴中心点坐标分为:① 利用圆面上点云数据拟合平面;② 将柱体点云数据投影到平面上;③ 利用平面上投影的点拟合圆,计算圆心坐标,从而确定拐臂销轴中心点坐标。拐臂销轴中心线与启闭机支铰中心线关系如图6所示。
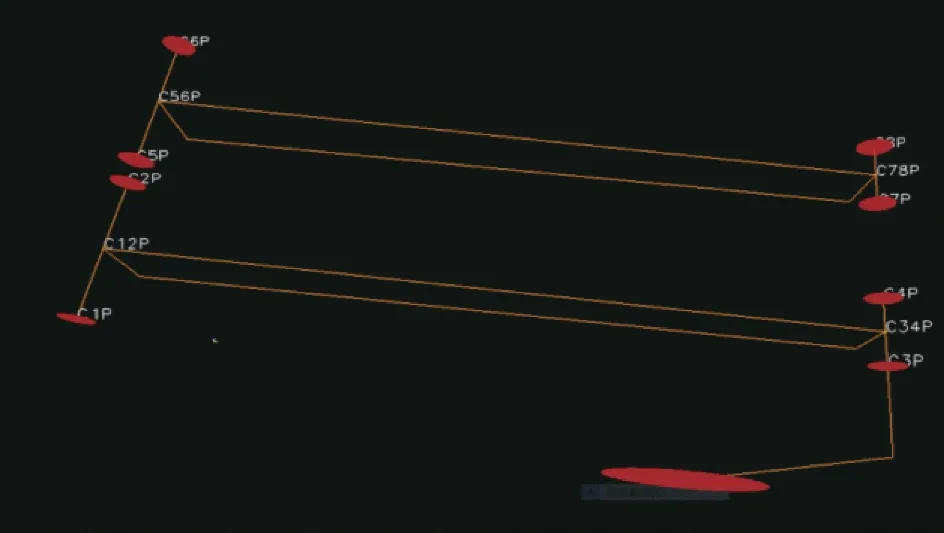
图6 中心线空间关系
(3)利用直线空间关系,计算拐臂销轴中心线与启闭机支铰中心线的夹角,计算结果如表1所示。
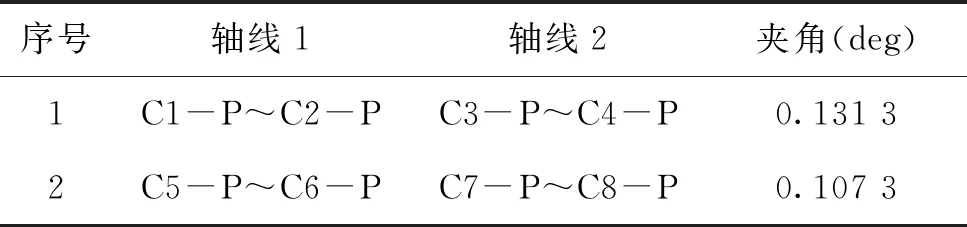
表1 角度计算结果
4 结 语
数字摄影测量技术具有很高的测量精度,具有工作效率高、非接触式、测量方式灵活、自由测站、实时三维点云测量、适用复杂观测条件等优点,故在工业结构尺寸精密测量中具有较强的实用性。本文研究了数字摄影测量基本原理、测点布置原则、网型设计原则、数据建模处理等相关问题。得出一些结论:
(1)采用数字摄影测量技术测量启闭机结构尺寸,较传统测量方法,不仅提高了测量效率,而且测量精度远高于传统测量方法,为启闭机改造修复提供了准确的数据支撑。
(2)基于数字摄影测量技术启闭机结构原始点云数据精度可达0.05 mm。
