三维激光点云数据在1∶500地形图成图方面的应用
2022-07-23郝立贞葛亚建张伟伟
郝立贞,赵 洴,葛亚建,汪 超,张伟伟
(1.浙江省测绘科学技术研究院,浙江 杭州 311100;2.诸暨市自然资源和规划局,浙江 绍兴 311899;3.浙江省国土勘测规划有限公司,浙江 杭州 310030)
0 引 言
三维激光雷达(LiDAR)是一种非接触主动式快速获取物体表面三维密集点云的技术。这项技术成为数字化时代下刻画复杂现实世界最为直接和重要的三维地理空间数据获取手段,在全球变化、智慧城市、全球制图等国家重大需求和地球系统科学研究中起到十分重要的作用。在传感器技术和国家需求的双重驱动下,三维激光扫描在硬件装备、三维点云数据处理以及应用方面取得了巨大的进步。这使得三维激光点云数据应用领域越来越广泛,用于建筑物三维重建[1-3]、路灯提取[4]、电力巡线[5]、生物量估算[6]、土方量计算、树高胸径提取[7]、园林绿化提取[8]等各个领域,取得了良好的效果,大大提高了工作效率。
传统地形图成图方式外业作业环境复杂,受天气影响较大,高温多雨季节外业测图具有一定的危险性,存在难以到达的区域,且作业效率低。三维激光点云数据可以获取地面物体高精度的三维坐标、回波强度、回波次数、扫描方向角度等多种基础属性信息。还可以根据基础属性信息衍生出坡度、坡向、点密度和强度等信息[9]。这些优势为基于点云绘制地形图提供了便利。本文以激光雷达点云数据为基础,实现三维地形测图。
1 三维激光点云处理
1.1 外业采集
在机载雷达扫描工作前对场地进行详细的踏勘,了解测区的地形、交通情况,根据测区实际情况设计合理的航飞扫描路线和扫描时间,避免设备长时间高负荷工作,实现最高效、最经济、最精确地采集测区三维激光点云数据。
1.2 点云数据处理
1.2.1 重采样
三维激光扫描数据具有采集速度快、采样频率高的优势,但这也导致点云数据具有高冗余的缺陷。因此需要对点云进行重采样,重采样的方法有4种比较常用,分别为曲率采样、栅格采样、统一采样和随机采样。根据工程项目的需要选择其中一种方法,经重采样后的点云更加精简,使用效率更高。
1.2.2 去噪
由于激光仪在点云数据采集时测区环境复杂,尤其存在施工区域时,施工机械的运动、人员走动、树木、建筑物遮挡、施工浮尘及扫描目标本身反射性的不均匀等影响,将会造成扫描获取的点云数据存在不稳定点和噪音点。这些噪点对作业过程产生一定的影响,需人机交互方式去除噪点。
1.2.3 拼接
点云拼接是将多站扫描点云数据拼接到统一坐标系中的过程。被拼接的数据是由每一站扫描的整个项目的数据,虽然在扫描过程中一条航线上每站数据会根据仪器自带的拼接功能完成初始拼接,但测区范围较大,需分多航带采集数据,几条扫描航带上的相邻站点间隔较长时间和隔了较多站点,惯导系统无法完成自动拼接,需要手动将每一条扫描航线上采集的点云数据拼接到一起。同时要检查每相邻两站之间仪器自动拼接的是否有误差,调整误差较大的相邻站点的点云数据。
1.2.4 着色
由于激光点云及其强度信息对扫描地物的反映能力有限,需要将采集的测区点云与同步采集的影像数据进行精确配准,使得点云不仅具有高精度的三维坐标信息,也具有更加丰富的光谱信息。
2 基于点云的地形图成图
在三维模式显示下,点云可清晰的反映地表的高低起伏状态。通过点云的多模式(真彩色、二值、强度)显示及匹配的同步影像数据辅助要素的判别。如图1所示,真彩色渲染模式下,点云可清晰的反应采集地物的状态,在植被覆盖度不高的地方,部分地物在此模式下可直接采集。在采集房屋等与地表存在高差的地物时,高程渲染模式具有更好的显示效果。

图1 点云反映的地表形态
在三维立体模式下,按照地形图成图要求,对测区的地形数据进行采集。一般先采集线状地物,如河流、道路等。此类地物与周围其他地物的区分较明显,采集相对容易。在地表植被覆盖较多的地区,需将点云数据进行滤波处理,提取出地面点云,减少植被对数据采集的干扰。对于地表植被的认定仅应用点云数据存在困难,内业先把地类边界线位置划定,具体地类需外业进行巡视确认。对于高于地表的建筑物、管线等地物的采集,是点云的优势所在。真彩色模式下的点云在反映管线地物时,由于管线地物较细,导致在此渲染方式下采集此类地物存在一定困难。在高程渲染模式下,与地表有高差的地物可清晰反映出来,在采集管线等地物时具有很大的优势。如图2所示,在高程渲染模式下,可清晰地分辨出建筑物的细节及管线的性质。
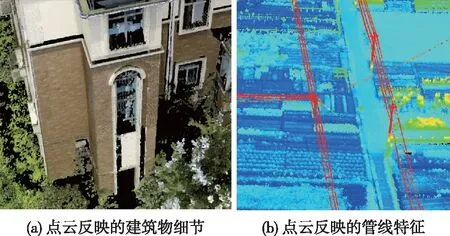
图2 点云反映的地表建筑物及管线
山区地形最直观的表现就是等高线,将三维激光点云数据滤波,生成山区地面点,用地面点数据生成高程点,在此基础上构建三角网,生成等高线(图3)。可根据工作需要选择5 m、10 m、15 m等不同采样密度的高程点,选择成图理想的等高线。

图3 利用高程点构建三角网生成等高线
由于三维激光点云数据采集的地物为全要素地物,在植被覆盖度高的地方,仅仅依靠激光点云采集的地形图会存在地物缺失的情况,因此将基于点云绘制的地形图输出纸质图纸,实地进行巡查、调绘,对因遮挡导致漏采集、错采集的区域采用 RTK、全站仪进行补测。
3 精度分析
为了验证三维激光点云绘图的平面精度和高程精度,选取了106个点用于三维精度分析,对这些检核点进行外业RTK打点确认实际三维坐标,与内业点云采集的三维坐标进行对比分析。具体统计情况如表1所示。

表1 三维精度统计表
由表1可知,对于平面中误差,一类地物点和二类地物点精度较高,原因是这类地物点主要是建筑物拐点,为了采集到建筑物4个面的完整点云数据,对这些地区进行了多角度的采集,点云密度较其他地方密度高,内业数据采集精度高。而三类地物有很多受植被覆盖的影响,内业采集精度较低。而高程中误差则不受地物类别的影响。经统计分析,基于点云的1∶500地形图采集平面中误差为0.077 212 m,高程中误差为0.030 868 m。满足1∶500地形图采集精度要求。
4 结 语
经统计分析,基于三维激光点云进行1∶500地形图测图精度满足要求。但在实际应用中还存在一定的困难:① 机载雷达采集的建筑物点云密度不够,需多次多角度扫描才能将建筑物各角度特征扫描完整,这在一定程度上降低了工作效率;② 在植被密集地区,植被对地表地物的遮挡较严重,单依靠三维激光点云数据采集地物结果不理想,需补充外业采集。综上所述,如何做好航线规划,使外业采集的三维激光点云数据完整的反映建筑物信息,及如何提高植被茂密地区点云数据的利用效率是亟待解决的问题。即使存在这些问题,但三维激光点云数据在测绘行业仍然有广阔的应用前景。
