三维激光扫描技术在古建筑图纸绘制中的应用
2022-07-23赵小祥
赵小祥,陈 勇,黄 亮
(江苏省测绘工程院,江苏 南京 210013)
0 引 言
古建筑的造型变化多样,诸如斗拱、飞檐等复杂部件很难使用标准的直线、弧线等几何图形表示,皮尺、钢卷尺、竹竿、全站仪等传统测绘仪器[1]存在很大的局限性,现场勾勒草图[2]的方式效率也比较低。另外,局部大样采用攀爬方式进行测量,容易对历史建筑造成不可逆的损坏。为此,本文以盐城市大洋湾生态公园盐渎古镇为例,探索将三维激光扫描技术[3]运用到古建筑测绘中,实现高效、准确、全要素的测量采集。目前,已有不少基于点云的古建筑测绘方法研究,许睿等人利用便携式3D扫描仪对古建筑斗拱模型进行建模[4],但手持设备并不适用于大型建筑的整体测绘。马宏毓以及王崇恩等人研究了三维激光扫描与建筑信息模型(BIM)相结合的技术[5-6],但仍不成熟。张晨颐等人使用地面激光扫描仪对玉溪市文星阁进行了三维建模[7],但是直接在三维点云中勾画边缘线,对作业人员的技术要求较高。
本文通过点云切片、旋转变换、边缘检测等方法,使得在三维点云中绘制平面图、立面图、剖面图更加简便。首先,在建筑外墙、室内墙壁、内外衔接以及楼层衔接等地方布设足够数量、分布合理的靶标,并架设自由站快速获取点云;然后,提取靶标中心作为配准的公共点,将所有点云置于统一坐标系下;最后,根据需要裁剪出点云切片,利用主成分分析[8]算法自动变换旋转到俯视视角,利用Canny算子[9]在栅格特征图中提取边缘线,并在AutoCAD软件中根据切片点云修整边缘线[10],得到平、立、剖图形所需线条。
1 数据采集预处理
1.1 仪器设备
三维激光扫描仪选用Leica ScanStation C10,如图1(a)所示。扫描范围0.1 m到300 m,垂直视场角270°,水平视场角360°,模型表面精度±2 mm,靶标获取精度±2 mm,最小扫描间距小于1 mm,最高速度5万点/s。
靶标选用Leica HDS黑白靶标,在A4可粘贴纸张上打印,如图1(b)所示。
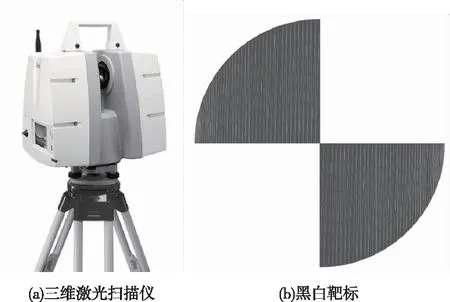
图1 仪器设备
1.2 三维激光扫描
为了减少外业工作量,使用自由架站的方式进行三维激光扫描,因此需要事先布设靶标,具体方法如下:
(1)针对室外,在每个外立面布设4个靶标,两边靠近转角处各布设1个靶标,中间布设2个靶标。要求4个靶标不在同一高度,而是呈错落分布。
(2)针对室内外衔接过渡,布设3个以上的靶标,要求能被门内外的设站同时观测到,通常选择门框侧面或者门对面建筑。
(3)针对室内,尽量选择通视条件最好的地方布设靶标,让尽可能多的站点处观测到。为了楼层之间的衔接过渡,在楼梯转角处增加3个以上的靶标。要求相邻两站之间,至少存在3个以上的公共靶标。
靶标布设完成后,开始进行三维激光扫描,选择自由架站方式、全景扫描模式、高分辨率。主要原则如下:
(1)先进行外部扫描,再进行内部扫描。内部先扫描低楼层,再扫描高楼层。每个房间都需要进入独立扫描,以减少盲区。
(2)为了保证数据质量,观测角与主要扫描面之间的夹角需要大于30°。
(3)仪器尽量架设在地面、水泥板等刚性物体表面,尽量避开木板、钢板等非刚性平台。
1.3 点云数据处理
使用三维激光扫描仪配套的Leica Cyclone软件进行数据的导出、解析、配准、去噪、裁剪等预处理操作。其中,配准需要利用靶标信息,效果如图2所示,具体步骤为:

图2 预处理成果
(1)在Cyclone软件中打开基准工程“Project R”,待配准工程“Project A”,在Modelspace视图中把点云模型调整到合适位置、大小、角度。
(2)创建Registration窗口,在Cloud Constraints Wizard窗口中建立“Project A”到“Project R”的几何约束关系。
(3)在“Project A”与“Project R”之间选择至少3对同名点(靶标或者其他角点)。
(4)实施配准:依次操作Cloud/Mesh-->Cloud Constraint-->Optimize Cloud Aligment,弹出配准结果窗口,检验配准精度。
在点云配准完成后,还要使用统计滤波器(SOR,StatisticalOutlierRemoval)过滤掉点云中的随机噪声,并人工裁剪掉墙角处的植被等无用数据。
2 平立剖绘制
2.1 点云切片与旋转
使用AutoCAD 2014及以上版本作为绘图软件,利用交互方式获取绘制平面图、立面图、剖面图所需的点云切片。
点云切片数据依然是三维的,直接在三维点云中跟踪边缘线,由于视线方向的深度较大,会导致技术要求高、生产效率低、准确率无法保证等不足。如果能将点云所呈现的平、立、剖面切换到正射视角,能够极大提高后续作图的速度与质量,但手动旋转的方式无法实现精确变换。为此,本文引入三维主成分分析(PCA,Principal Component Analysis),利用Eigen开源库实现功能,主要步骤为:首先,求取切片点云的质心坐标,并将所有点的坐标减去该值;接着,计算切片点云的协方差矩阵,得到3个特征向量及其对应的特征值;最后,将最小特征值对应的特征向量输出为法向量。
计算法向量与竖直方向的夹角,在右手直角坐标系中,前立面、左右剖面绕X轴顺时针旋转该角度,后立面绕X轴逆时针旋转该角度,左立面绕Y轴顺时针旋转该角度,右立面、前后剖面绕Y轴逆时针旋转该角度。均得到正射视角。本文利用liblas库支持点云的读写,利用eigen库支持点云的PCA计算以及旋转矩阵运算,最终对指定类型的点云切片实现了自动旋转变换。效果如图3所示。
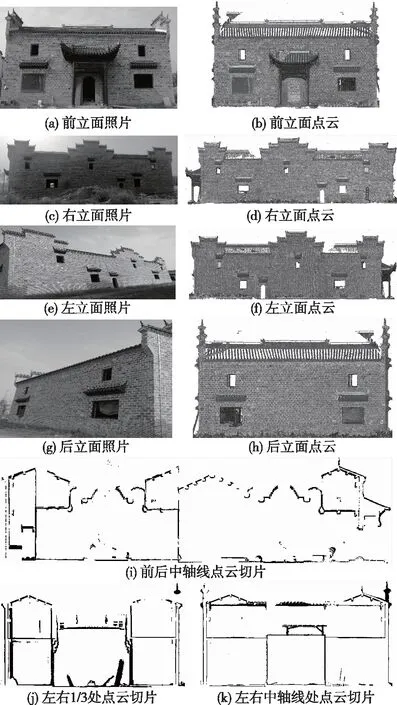
图3 点云切片
2.2 平立剖绘制
在Cyclone软件中将点云切片栅格化,生成二值特征图,利用Canny算子提取边缘线,并保存为dwg格式。AutoCAD软件同时导入点云切片以及边缘线,根据点云对边缘线进行编辑修改,生成最终的平面图(图4)、立面图(图5-图6)、剖面图(图7-图8)。
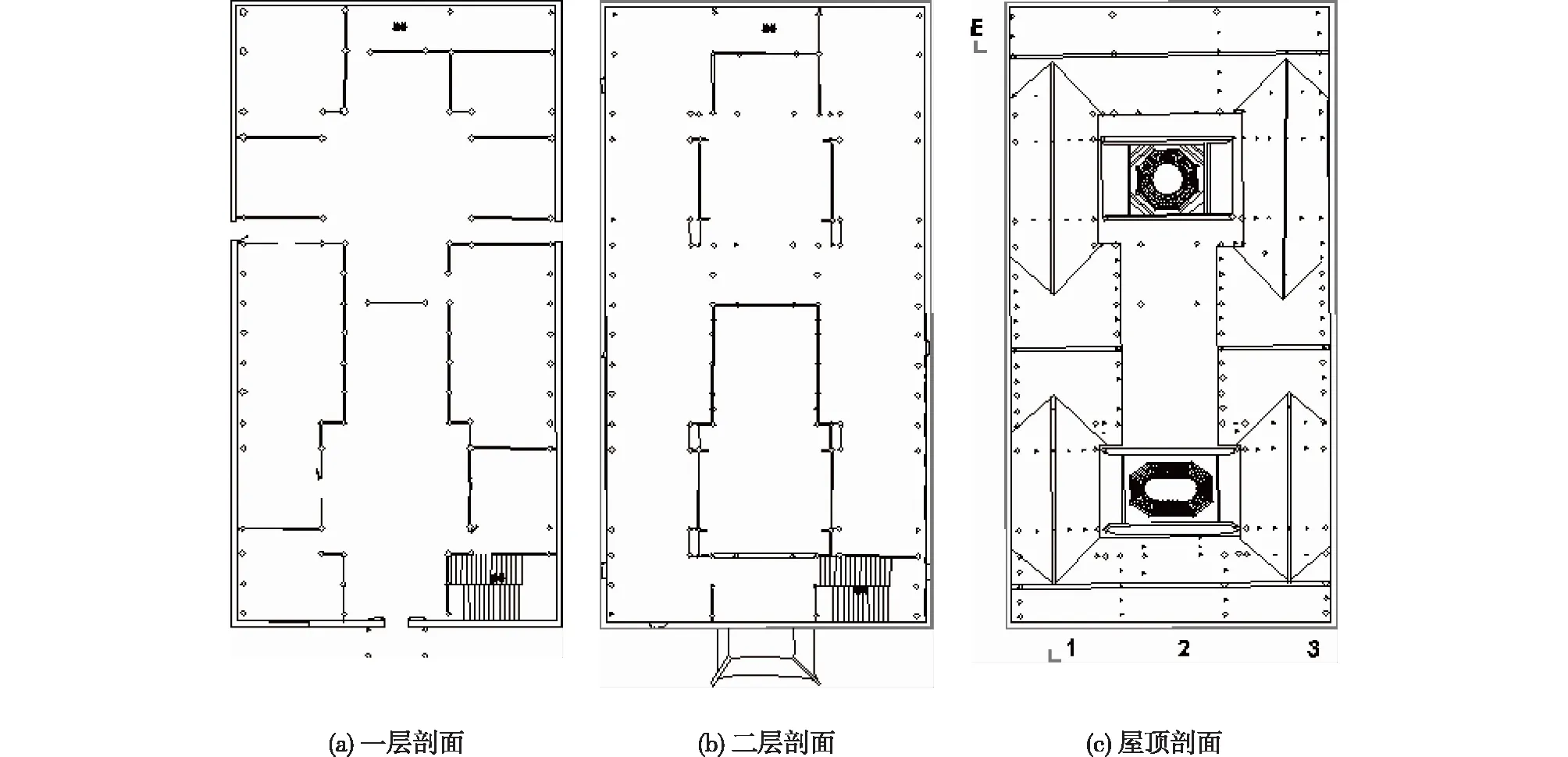
图4 平面图

图5 前立面图
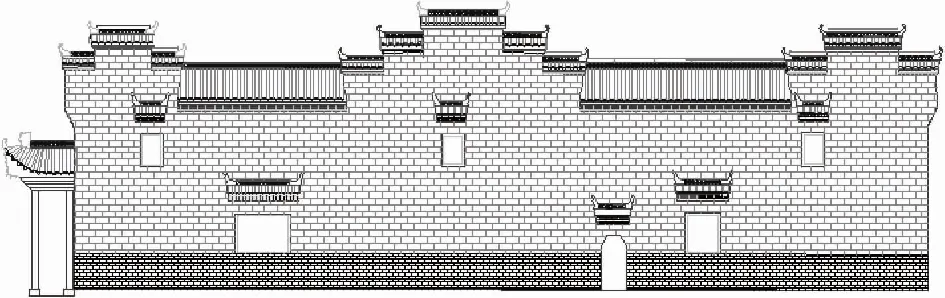
图6 右立面图
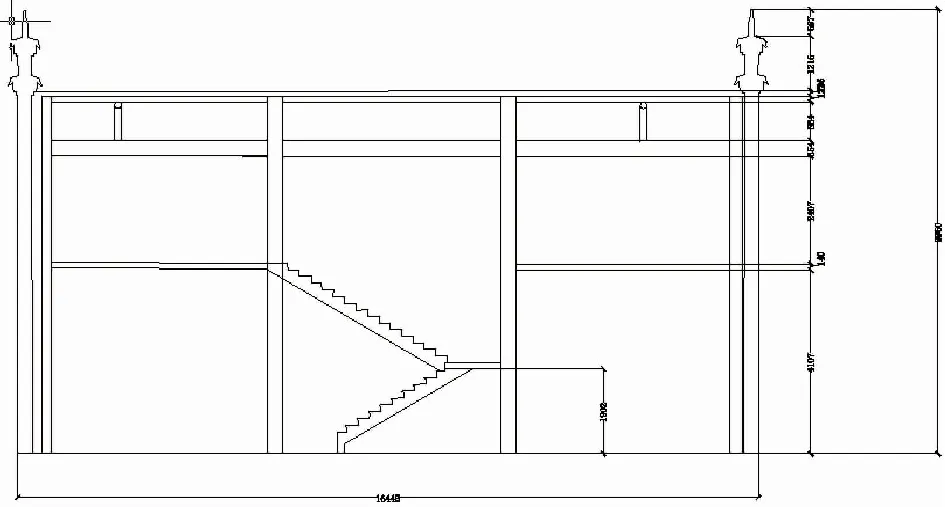
图7 东西向E-E剖面

图8 南北向1-1剖面
3 结 语
本文方法首先利用三维激光扫描仪自由架站的方式快速获取古建筑室内室外的高精度点云数据,各站数据依靠靶标进行配准。接着,按照平立剖需求对点云实施人工切片,并引入主成分分析方法实现点云切片的自动旋转变换。最后,利用Canny算子提取边缘线,并在AutoCAD中结合点云编辑边缘线生成平面图、立面图、剖面图。该方法具备成本低、速度快、精度高等优势。但由于仪器设备的视角局限性,顶面数据缺失较多。因此,下一步工作需要研究无人机载激光扫描与地面激光扫描相结合的古建筑测绘方法,重点解决多源点云数据的配准精度。
