基于MATLAB的S环形无碳小车的凸轮设计研究
2022-07-23彭潇潇欧友良仇朝阳
彭潇潇 欧友良 邹 权 仇朝阳
(1.湖南工程学院,湘潭 411101;2.国网湘潭供电公司,湘潭 411104)
小车设计源于第七届全国大学生工程训练竞赛命题。比赛规定,由学生设计并且制备一台可以自主控制方向的势能驱动车,小车在行驶的过程中与地面接触,且所需要的驱动能量全部由重力势能转换而 来[1-2]。小车要求在赛道内连续稳定穿过障碍桩,走出S环形轨迹[3],如图1所示。
依据上述要求,设计提出了一种凸轮控制转向的三轮结构小车。三轮分别为主动轮、前轮和从动轮,如图2所示。凸轮可以控制前轮的转向角度,所以凸轮设计是小车的核心技术问题。
1 S环形小车及凸轮设计
采用MATLAB参数优化分析设计的方法仿真得到凸轮形状。需要事先确定小车前轴到后轮轴的距离A和主动轮偏距eL,如图3所示。
本文创新性地提出了设计前轮转角来推出凸轮推程的方法。由于S环形轨迹是中心对称,所以只需要设计半个S环形的轨迹就可以设计出凸轮。首先,按角度等分,将凸轮分成N份,设置凸轮每转过360°/N时主动轮走过的距离为LT(仿真中取0.00006)。小车起始点为O,坐标为(-1.8,0),主动轮垂直于水平线。设置主动轮偏距eL、节点距离LT、前轮转角θ、主动轮与各桩连线(对称轴)的夹角ϕ、前后轴距离A等参数,则可以推算出小车各个点的行走轨迹。设phi为主动轮转过的角度,x为O点横坐标,y为O点纵坐标,l为凸轮每转过360°/N时O点经过的距离,lz为下一步左轮前进距离,ly为下一步右轮前进距离,lq为下一步前轮前进距离,xz为从动轮横坐标,yz为从动轮纵坐标,xy为主动轮横坐标,yy为主动轮纵坐标,xq前轮横坐标,yq为前轮纵坐标。
计算的相关代码如下:
拟定轨迹如图4所示,凸轮每转过一圈,小车需走出一个S环形,前轮转向需经历“左转—右转—左转—右转—左转—右转—左转—右转—左转”的过程。在设计小车的前轮转角曲线时,为了保证前轮转角曲线的曲率连续,小车左转到右转的过渡用正弦曲线实现,且设置小车右转和左转时的前轮转角为一常数(即小车走圆弧轨迹)。
要实现的目标:(1)设置起点坐标为(-1.8,0),起始方向如图4所示;(2)调试出如图4所示轨迹,使轨迹完全闭合;(3)行走过程后轴中点O与各障碍物(包括极限位置)的距离尽可能保持一致,减小发生撞桩的可能性。
为调出满足上述要求的曲线,需要设置前轮转角曲线的几个参数:主正弦曲线的幅值a、b、c、d、e,决定了小车左转右转的幅度大小;各段曲线节点数N1、N2、N3、N4、N5、N6、N7、N9、N10,决 定 小车左转和右转时走过的距离;节点数之和与LT的乘积,即小车走过一个周期的距离。
通过调节以上几个参数,可以得到当设置参数如下时,小车的轨迹最为理想:N=187206、N1=15000、N2=3000、N3=16500、N4=3000、N5=16500、N6=0、N7=18000、N8=3000、N9=17000、N10=[N-2(N1+N2+N3+N4+N5+N6+N7+N8+N9)]/2。
前轮转角各段曲线幅值a=0.165、b=-0.275、c=0.24、d=-0.190495815、e=0.278299408。
前轮转角确定后,通过设置凸轮偏距、基圆半径R0以及与凸轮接触的轴的直径da,即可推算出凸轮的推程,进而得到理论凸轮的形状,如图5所示。
自行设置好传动i后,可推得后轮直径,此时得到的直径为非整数。为了得到较为简洁直观的数据,可以微调节点数,微调后可获得前轮传动比i为27.5时,后轮直径为130.00 mm,传动比较大,故选择二级传动。取i1=5,i2=5.5,齿轮模数取1,齿数取z1=z2=20、z3=100、z4=110。
理论凸轮无法直接应用到无碳小车上,除了凸轮推程最大的点,接触轴与凸轮的理论接触点和实际接触点均不在同一位置。为解决这个问题,用椭圆对理论凸轮进行包络,求得其内包络线即为所需的实际凸轮[4-5],如图6所示。
2 小车各参数
经MATLAB仿真或自行设计得到的小车参数,如表1所示。
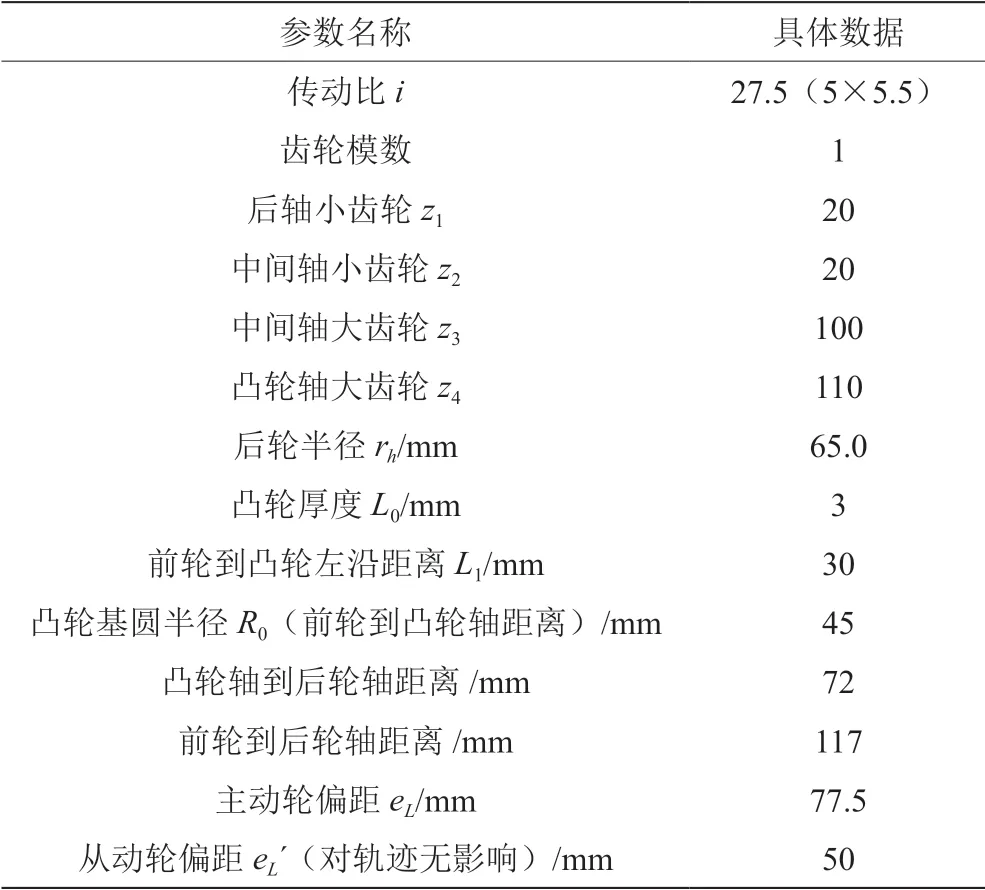
表1 小车参数
3 轨迹仿真
将路程分成N份,从初始点开始,一步一步迭代求出下一节点的坐标,进而仿真轨迹。仿真目标为后轴中心、主动轮、从动轮和前轮的轨迹。
首先,确定小车参数。参数主要有主动轮与前轮的偏距eL、前后轴距离A、小车行走过程的曲率p、凸轮旋转一圈时的主动轮路程L。设置小车的车身倾角为φ,前轮转角为θ,则前轮转角θ=arctanpA。
将路程分为N份后,每两节点间主动轮前进的距离ly、每两节点间后轴中心前进的距离l、从动轮前进的距离lz以及前轮前进的距离lq分别为:
其次,在确定节点间距离后,可开始轨迹仿真,以后起始点以O为例。设小车后轴中心的初始点O为(-1.8,0),主动轮、从动轮和前轮的初始坐标可以根据小车结构参数求得。此时,小车车身水平向下(ϕ=90°),采用迭代进行轨迹求解的方法,有车身倾角ϕ(i+1)、后轴中心横坐标x(i+1)和后轴中心纵坐标y(i+1)分别为:
对上述步骤循环N次,即可求得凸轮旋转一圈,即小车走出半个S环形时的后轴中心轨迹。主动轮和从动轮的轨迹求解与后轴中心类似,只需将l替换城ly或lz即可。对于前轮的行走轨迹,还应考虑前轮转角的影响,仿真时需在车身倾角ϕ后加上前轮转角θ后再进行轨迹求解。
前轮、主动轮、从动轮的轨迹仿真如图7所示。
4 结语
本文提出利用MATLAB参数优化方法设计S环形无碳小车的凸轮结构,对小车结构创新和优化具有重要指导意义。利用本设计思路进一步进行三维运动仿真,可为小车后期设计制作实物提供便利,节省了大量的人力、物力和财力。试验结果表明,设计的S形无碳小车能有效优化运动轨迹。
