定位系统在有轨机车无人驾驶中的应用
2022-07-21黄元叶
黄元叶
(宜春钽铌矿有限公司,江西宜春 336000)
0 引言
机车远程驾驶系统是以提升宜春钽铌矿运输效率,降低系统作业人员数量及运维成本为目标的矿山生产综合管理系统。可实现机车无人驾驶、远程放矿、矿石自动卸载、矿石自动称重、机车安全预警等功能,能够显著提升运输效率,优化生产运输调度,合理利用资源,降低生产成本,保障生产作业安全,是建设智能化矿山、科技化矿山及未来无人化矿山的重要支撑系统,定位系统的实现是无人驾驶系统的关键所在。
1 定位系统数据交换的关键——网络平台
对比4G 与5G 网络覆盖范围,1880 MHz 频段4G 网络有效覆盖半径能达到2000 m,而5G 网络相对低频段2.6 GHz 有效覆盖半径不足500 m。在宜春钽铌矿有限公司数字化矿山——电机车无人驾驶系统建设中,考虑建设成本及覆盖范围要求,为满足定位系统相关数据交换,需搭建网络平台——4G LTE 无线专网,由核心网设备、网管系统、室外覆盖基站、集群终端、室外CPE 终端、调度系统、移动基站等部分组成。无线宽带集群专网系统的分级组网模式下,在调度中心机房统一管理eSCN 核心网设备、网管服务器、综合调度机、系统网管等网络设备调度所有用户,运输沿线建立若干个移动基站实现完全覆盖,如有隧道还需敷设泄漏电缆进行网络覆盖。以车载CPE(EG860V2)为载体,实现上位机与有轨机车之间的通信。LTE 无线专网调度系统框架如图1 所示。

图1 LTE 无线专网调度系统框架
2 定位系统实现
2.1 定位标签
基于现场运输线路潮湿、环境复杂,有源电子标签和半有源电子标签内部均需电池供电,成本高、寿命有限且不易做成薄卡,不能满足现场环境使用要求。为满足机车定位系统要求,定位标签选型可选用高射频无源电子标签[1]即RFID 标签,其工作原理如下:在RFID 读卡器的读出范围之外时,电子标签处于无源状态,在阅读器的读出范围之内时,阅读器发出的射频能量为无源电子标签提供工作所需的电源,采用反射调制方式向读卡器传送相关标签信息。根据宜春钽铌矿有限公司电机车运行速度≤10 km/h,读卡速率能达到200 ms 内读取两次以上即可。显然,无源电子标签能达到现场使用要求。
2.2 定位标签与读卡器的安装
根据宜春钽铌矿有限公司露天式有轨运输方式,运输线路由“隧道+露天式轨道运输”两部分组成,在定位标签的安装方式上选用两个安装方案:①在隧道侧面及架线杆上安装定位标签,在电机车头同侧面安装定位标签读卡器实现定位标签的读取功能;②在轨道枕木上安装定位标签,在电机车头底部安装定位标签读卡器实现定位标签的读取功能。固然“侧面安装”方式读卡器及定位标签具有能保持干净整洁,也容易维护等优点,但在实际使用过程发现读取效率不高,部分标签读取距离较长,容易出现标签漏扫现象。选用“枕木安装”效果显著,基本上没出现漏扫标签现象,对现场及电机车头整体较为美观大方。通过两种安装方式对比,采用枕木安装定位标签及车头底部安装读卡器方式,实现了定位标签相关数据的读取功能(图2)。
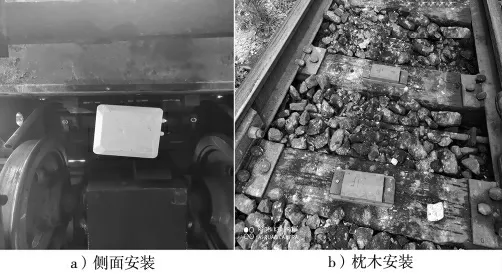
图2 定位标签安装
为保证定位标签识别的准确及有效性,在定位点上安装两个定位标签,读取其中一个定位标签就能实现定位系统的相关功能,采用“二选一”读取方式,大大减少标签漏扫及标签损坏导致定位功能失效的故障率,保证定位系统的平稳运行。
2.3 定位标签读取
RFID 标签采用RFID 标签读卡器实现对标签数据的读取及传输。在机车上安装读卡器读取RFID 定位标签。RFID 读卡器是一种能阅读电子标签数据的自动识别设备,RFID 射频识别是一种非接触式的自动识别技术,它通过射频信号自动识别目标对象并获取相关数据,识别工作无须人工干预,可工作于各种恶劣环境。RFID 技术可识别高速运动物体并可同时识别多个标签,操作快捷方便。RFID 标签读卡器的读取可靠性直接影响整体无人驾驶系统运行的稳定性,在宜春钽铌矿有限公司数字化矿山项目——电机车无人驾驶系统建设中,通过比对多种RFID读卡器实际运行情况,在与PLC 数据传输过程中,不仅通信协议及现场总线连接方式要一致,与RFID 标签卡射频范围也应保持一致,才能实现机车运行过程中标签读取稳定、可靠,不出现漏扫标签现象,为无人驾驶及自动驾驶奠定基础。定位系统效果如图3 所示。

图3 定位系统效果
2.4 现场总线与通信协议
RFID 标签读卡器与PLC 之间数据交换是通过相关通信协议建立联系,监测机车的运行轨迹及实时位置,进而实现机车自动驾驶、自动变道及视频切换等功能。
目前市场上运用较好的现场总线与通信协议主要有CANbus 总线与CAN-bus 协议及RS-485 总线与Modbus 协议,两种方式均能实现数据交换功能,由于标签读卡安装在机车上,与PLC 的传输距离近,而RS-485 总线抗噪声干扰性强,传输距离也能满足要求,具备多站能力且建设成本相比CAN 总线要低的多,在宜春钽铌矿有限公司数字化矿山项目——电机车无人驾驶系统建设中,现场环境噪声干扰性较大,选用RS-485 总线及Modbus 协议,实现RFID 标签读卡器与PLC 之间的数据交换,为PLC 的数据处理稳定性提供保障。
2.5 可编程逻辑控制器
可编程逻辑控制器即PLC,是机车无人驾驶系统的重要组成部分,通过Modbus 通信协议与RFID 读写器建立连接,读取机车的实时位置信息并共享给中控室上位机,根据读取的位置信息,编写PLC 逻辑控制指令及上位机控制指令,实现定位系统相关功能及信集闭系统具有重要意义。
2.6 信集闭系统
信集闭控制系统统一协调指挥电机车运行路线和作业顺序,根据信号联锁规则,自动控制转辙机和信号灯的动作,控制信号灯或虚拟信号灯的开放与关闭,同时为电机车提供装矿和卸矿溜井等目标位置。在上位机上实时显示电机车在运输巷道内的位置、机车序号、车速及信号灯、道岔和区间的状态等信息。系统具有故障声光报警功能,能实时显示故障的具体位置。同时自动记录运行过程数据,生成管理报表,需要时可对电机车运行轨迹进行模拟回放。系统对电机车运行信息全程跟踪、自动开放运行信号、转动道岔、检测道路状态,指挥列车安全运行,符合故障导向安全原则,实现无人驾驶电机车的全自动智能调度。
信集闭控制系统采用集散式计算机控制系统,系统由上位机和下位机构成:上位机设在地面主控制室,下位机设在井下被控对象附近,两者之间的控制命令及被控对象的状态信息均由光纤通信介质完成数字信号传输。主控室配备操作台,操作台配备工业控制计算机管理计算基于电机车的精确定位数据,信集闭控制系统进行逻辑运算,自动控制井下转辙机和信号灯执行相应指令,实现相应设备一键式自动集中控制。地面操作工根据电机车的位置数据和信集闭系统的信号指令,远程遥控电机车使其自动运行到装、卸矿溜井。电机车全程闭锁运行,避免追尾事故的发生,同时将运输系统的监控信息上传地面调度指挥中心,随时反映各设备的工作状态。
3 定位系统功能
(1)实时监测机车运行位置信息:通过RFID 安装位置监测机车读取标签时的位置信息,再根据速度传感器读取电机齿轮转动圈数计算机车行走距离,通过坐标的形式实现机车的精准定位。
(2)实现区间定速巡航:上位机依据RFID 标签的位置信息实现区间定速巡航功能。
(3)自动升降弓:根据机车位置信息在架弓线连接处、卸载站,放矿平台等易挂弓等重要节点实现自动升降弓功能。
(4)道岔自动控制:根据机车位置信息及行驶方向实现岔道转辙机正确变道。
(5)视频自动切换:无人驾驶系统视频监控由车载视频及主要位置视频组成,为保障机车安全运行,需跟据机车位置信息自动切换各个位置视频,实现掉道监测功能。
(6)自动对车:在放矿过程,矿车箱与振动台板的对齐过程可由机车位置信息来实现。
4 结束语
探讨定位系统在有轨机车无人驾驶中的应用,构建安全、可靠的机车定位系统,系统主要包括网络平台、定位标签与读写器、现场总线与通信协议、PLC 等,以实现有轨机车无人驾驶精确定位,在无人驾驶系统的控制、道岔变道、安全运行等方面具有重要意义。
