矿用电机车安全防护系统的设计研究
2022-09-23赵翔
赵 翔
(华阳集团新景公司,山西 阳泉 045000)
引言
目前,煤矿企业运输煤炭中最关键的机械设备为矿用电机车,由于持续增加的采煤量,同时也持续增加了电机车所具有的运载量,不仅使越来越多的矿用电机车被应用到井下,而且车辆的使用次数也逐渐增多,同样使运输管理困难度也增大,并且有不少的安全事故发生在运输期间,影响着煤矿对安全的管理与经济效益,对矿用电机车在运输调度体系带来一定的考验。当使用矿用电机来进行运输时,经常会发生误倒车、追尾碰撞、超速脱轨、闯红灯等安全事故。其中产生超速脱轨与追尾碰撞的次数最多。上面这几种安全事故的发生不但会损坏电机车,而且威胁到工作人员的人身安产生,对煤矿正常开采带来很大的影响。基于之前的电机车信集闭系统,对安全防护系统进行设计与优化并深入展开分析。
1 优化所设计的电机车安全防护系统的总体架构
图1为矿用顶级车安全防护优化设计的总体架构。基于之前的电机车信集闭系统,把声光报警装置、视频监控系统、射频识别检测、红灯信号检测、超声波收发检测、霍尔传感器检测进行了增设。按照所设计的详细方案,报警、视频监控、防超速脱轨、防追尾碰撞、防误倒车、防闯红灯所有功能被工业以太网所融合,一直融合至之前的信集闭系统内,然后在井下轨道中创建矿用电机车安全运输系统,该系统减少了安全事故的概率。工业以太环网可以让车载监控系统和井上监控调度中心进行通信,而且创建的以太网可以把通信所具有的扩展性提高,这样有利于信集闭系统有别的系统的接入。
2 实现和设计电机车安全防护系统功能
2.1 防闯红灯功能
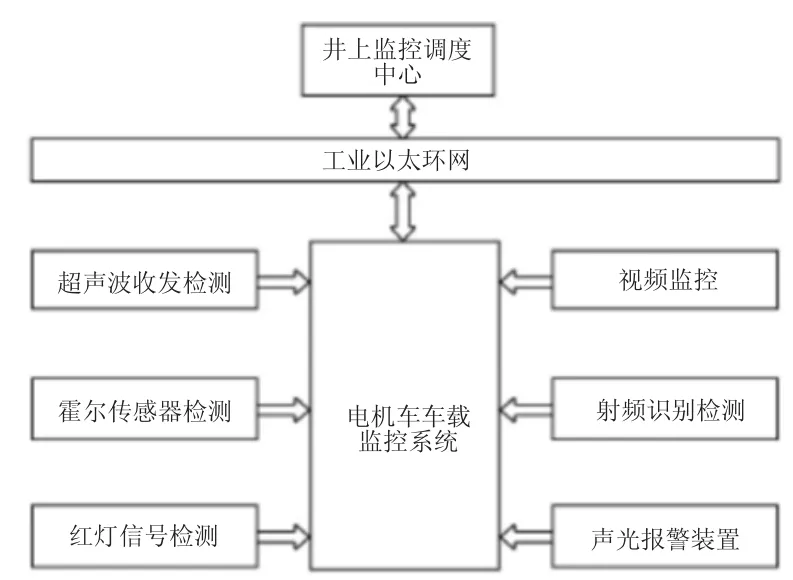
图1 矿用电机车安全防护系统优化设计总体架构
在设计防闯红灯功能时,当电机车运输煤矿时,会遇到红灯、绿灯,如果此时亮灯的是绿灯,那么电机车就会行驶与运输;如果此时亮灯的是红灯,那么电机车就会是停止状态,若电机车由于特殊原因不能停止运行,那么就会触发报警装置并报警,而且,当处于报警装置时,电机车就会由于控断电而不能运行[1]。
若想实现这项功能,那么就要电机车车载系统、红灯信号检测器和之前的信集闭系统三者的配合。第一就是在设定电机车正常运行线路时,要由信集闭系统来实现,然后电机车在根据已经设定好的线路进行运行。在电机车从有红绿灯的道口经过时,检测红绿灯所处状态的是红灯信号检测器,在完成检测之后,电机车的车载系统会接收其检测信号,其主控器在对其信号处理。若检测信号是绿灯时,信号为低电平被主控制器所输出来,此时的电机车能够运行;若检测信号是红灯时,信号为高电平的被主控器所输出来,电机车的制动和报警被本信号进行控制,能够防止电机车发生闯红灯。
2.2 防超速脱轨功能
在设计防超速脱轨功能时,根据相关要求:当电机车运输煤矿时,由于较快的运输速度,所以就会发生超速,车载监控系统中发出报警信号,而且运行速度还会由控制调速器所下降,预防发生超速脱轨。
如果要想该功能得以实现,检测电机车正常行驶的速度的是霍尔传感器,把霍尔传感器安装至其车轴中,经过车载控制器会把电机车行驶速度从车轴转动的实际速度中逐渐转化过来。在系统中对电机车行驶速度进行了范围的限定,并以设定的速度范围为基础,来判定其运行的实际速度,在电机车运行的实际速度没有在该范围内时,那么声光报警装置就会被触发,而且还是被车载系统所触发,那么电机车实际的行驶速度由于控制调速器而下降[2]。
2.3 防碰撞、防追尾功能
在设计防碰撞、防追尾功能时,所需要的有关需求:当电机车运输煤炭时,若对系统进行检测时,发现相邻电机车与电机车彼此之间的距离比之前设定的距离要小时,那么报警装置就会被触发,并把信息上传到监控调度中心,而且把刹车减速命令发出来,保障电机车能够安全的运行,预防发生碰撞与追尾。
如果要想该功能得以实现,那么需要使用的检测技术就是射频识别,该技术要把射频通讯仪器进行安装。使检测电机车正常运行具有连续性得以实现。而且该技术能够分析与判断相邻电机车与电机车彼此之间的距离,确保两车彼此之间的运行的安全距离,使电机车能够安全运行。
2.4 防误倒车功能
在设计防误倒车功能时,所需要的有关要求:当电机车正在倒车时,若障碍物距离电机车的距离在安全距离之上,那么报警装置就会被触发,然后监控调度中心的人员就会被提示;若比安全距离小很多时,那么电机车会由于控制而运行停止。
如果要想该功能得以实现,那么就要由超声波发生器来实现,电机车的左右两侧安装着该装置。在电机车所实施的操作是倒车时,就会启动超声波收发器,而且探头所具有的探测功能就会被开启,探测的方向是所有的方向,若有障碍物被发现时,障碍物距离电机车的距离就会显示到显示屏中,若大于安全距离而且是已经进行设定的,则会触发报警装置,并对监控调度中心进行提醒;若比安全距离要小很多,那么电机车就会由于控制而运行停止[3]。
3 应用效果分析
基于电机车之前的信集闭系统,对安全防护系统的设计进行了优化,并在矿井内进行应用,经3个月的试运行时电机车发生超速运行、闯红灯的次数减少。在对安全防护系统进行升级之后,前面和后面的电机车彼此之间所处的运行状况可显示到显示屏中,使工作人员能够随时进行观察,该系统若想判断有没有发生碰撞追尾等安全事故其依据的是车距离车的距离。当系统正在试运行时,大幅度降低了发生安全事故的次数,相比于没有防护系统,下降了大概90%,这就说明,在对安全防护系统的设计进行优化之后,已经到达了预期的要求,不但提高了管理能力,还提高了煤矿企业的经济效益。
4 结语
矿用电机车在矿井运输中易出现安全事故,如碰撞、追尾、误倒车、超速脱轨、闯红灯等,由于要避免发生上述几种安全事故,基于电机车之前的信集闭系统,对安全防护系统进行了设计与优化,而且该系统需要和以下技术相融合,包括射频识别检测、红灯信号检测、超声波收发检测、霍尔传感器检测等。经实际应用效果发现,在对安全防护系统进行升级之后,电机车发生安全事故的次数大幅度降低,使煤矿运输更加可靠与安全。
