基于非线性前馈控制器的电液驱动离合器系统控制
2022-07-21邝家凯
邝家凯
(广东理工学院智能制造学院,广东肇庆 526114)
离合器是汽车重要的部件,其性能关系到汽车驾驶的安全性与舒适性。离合器运动轨迹的准确控制,是提高离合器优良性能的重要方法之一[1-2]。
为了提高离合器运动轨迹的控制准确性,人们对其展开了研究。例如:Kim 等[3]将离合器动力传动系统解释为一个具有执行器冗余的过驱动系统,并提出了一种双层控制策略,其中上层控制策略用以确定离合器和发动机最合适的扭矩轨迹,下层控制策略管理每个执行器跟踪给定扭矩轨迹的误差,从而实现对离合器运动轨迹的控制。文献[4]对离合器控制系统建模后,构造了一个数据驱动的模糊规则库,用于自适应完成参数整定,建立了一种计算离合器接合参考轨迹的输出反馈律,以消除不连续的滑杆过渡,从而实现跟踪参考轨迹并补偿系统的非线性。Michel 等[5]提出了一种基于近时间最优的两级平面度前馈控制器,针对充液阶段的两个阶段,建立了液压驱动系统的两个简化物理模型。对于这两种模型,都可以找到一个平坦的输出,并用符号计算微分参数化。随后,利用在线轨迹生成器生成平面输出的近时间最优轨迹,以实现离合器的运动轨迹控制。当前方法虽然实现了对离合器运动轨迹的控制,但控制准确性还有待提高。
本文在分析电液驱动离合器系统中的液压装置结构和建模后,设计了一种非线性前馈控制器,用以对离合器的运动轨迹进行控制。该控制器以输入仿射系统为基础,联合非线性补偿控制律和线性状态变换模型而实现。实验中,通过非线性前馈控制器对不同目标轨迹进行跟踪测试,验证了其对离合器运动轨迹控制的有效性。
1 液压装置结构分析
本文所研究的液压装置为无液压蓄能器的系统,主要由1 个恒排量的叶片泵、4 个控制压力和容积流量的液压阀和1 个作为耗电元件的离合器组成,其功能结构[6-7]如图1所示。
图1 中,止回阀和限流阀是被动控制元件,用于限制或阻止液压动力向不需要的方向传输。在图1 所示系统中有3 个输入量,分别为up、uR和uc。其中,up用于确定泵驱动扭矩,从而确定泵体积流量;uR用于控制调节阀的输入压力,从而调节管路压力;uc用于控制比例方向阀,以调节液压缸的压力,控制离合器的接合与分离,同时液压缸的压力还决定了离合器的静止压力大小。
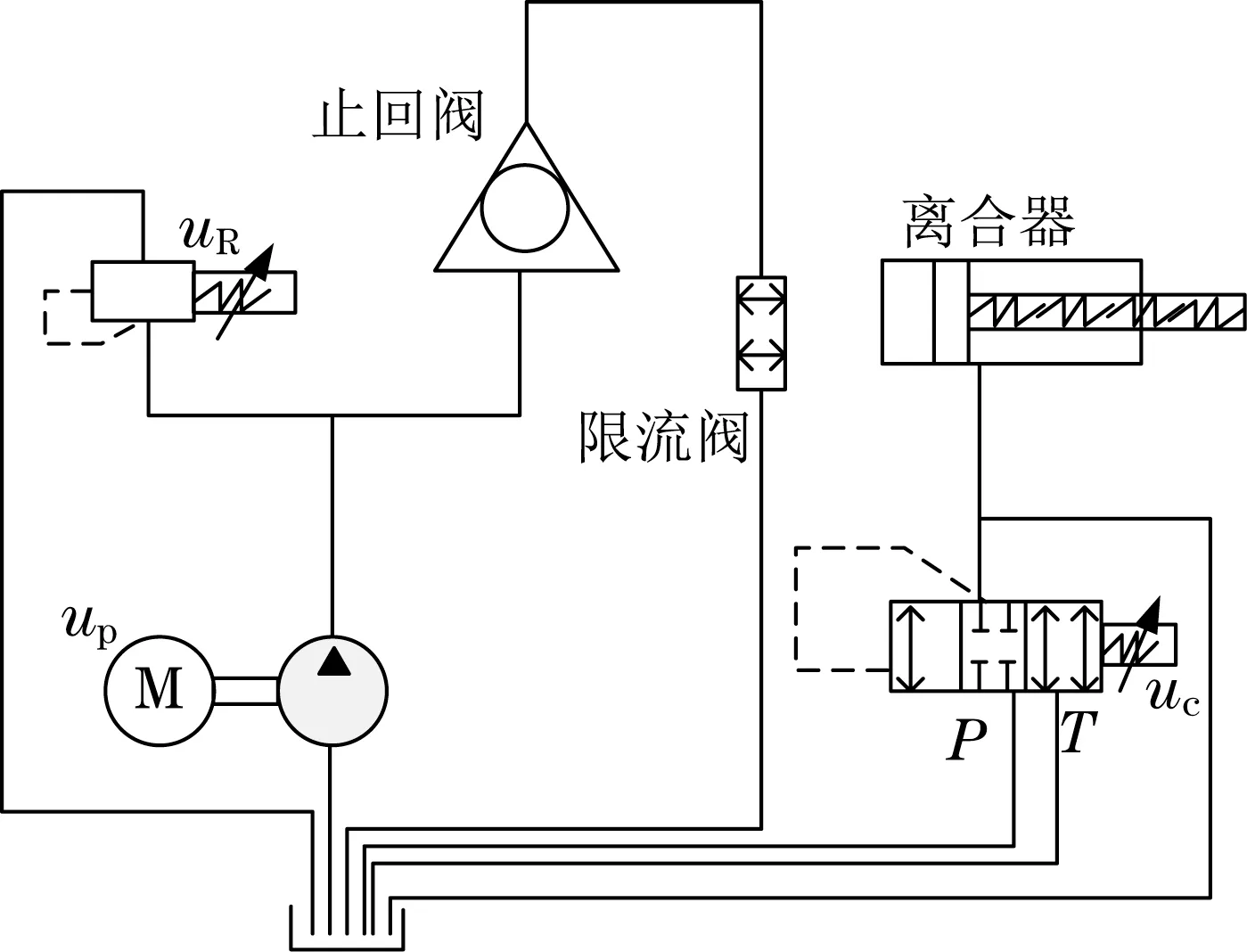
图1 无液压蓄能器的液压装置功能结构Fig.1 Schematic diagram of hydraulic device without hydraulic accumulator
2 液压装置建模
在图1 中,液压装置的物理方程可通过泵的角速度及活塞位移来描述,其表述为[8-9]
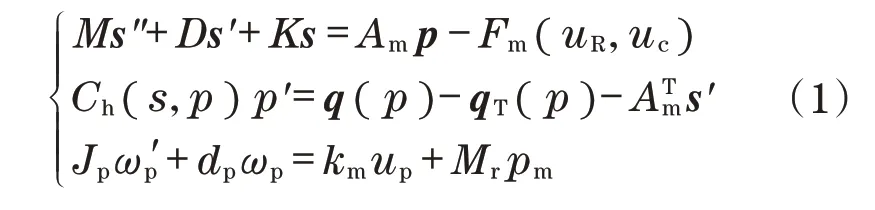
式中:ωp为泵角速度;Jp为泵的转动惯量;dp为泵的阻尼系数;km为泵的最大驱动扭矩;pm为系统压力;Mr为泵的旋转阻力系数;Fm(uR,uc)为系统所受外力;s为关于调压阀sprv、电磁阀svfs、离合器的活塞位移scl0的矢量,其表述为

p为关于系统压力pm、调节阀输入压力pOR0、管路压力pPRV、止回阀压力pBC5、限流阀压力pBC0、液压缸输出压力pVFS和离合器输入压力pCL0的矢量,其表述为

q(p)为关于p中各压力对应的流量,其表述为

式中:为液压缸的供给流量。
qT(p)为关于通过止回阀的流量qOR5、层流泄漏流量qLE0和qLE1及液压缸回流油箱的流量的矢量,其表述为

系统中,控制边缘的湍流流量qCE、止回阀的湍流流量qCV、限流阀的湍流流量qLV和泄漏流量qLE的求取过程为
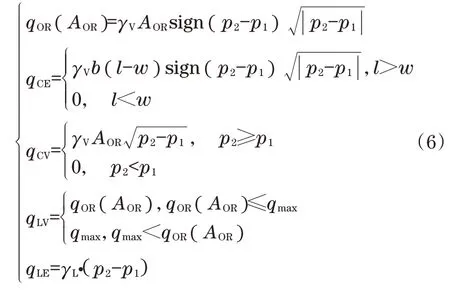
式中:AOR为对应阀孔面积;p2~p1为通过相应电阻元件的压降;b、l、w分别为阀芯周长、位移、叠合量;qmax为阀孔最大流量;γV、γL分别为湍流和层流系数。
系统矩阵M、D、K、Am、Ch(l,p)的计算过程为[10-11]

式中:M、D、K各元素分别为调节阀、比例方向阀以及离合器的质量、阻尼系数、刚度系数;Ch(l,p)中各元素分别为液压泵、调节阀、液压管路、止回阀、限流阀、液压缸、离合器的容积;APRV、AVFS、ACLO分别为调节阀、比例方向阀、离合器的面积。
3 非线性前馈控制方法设计
由式(1)可知,液压装置的物理模型为一个非线性模型,为了克服其非线性特征,通过对输入输出线性化,设计非线性前馈控制方法,对液压装置进行控制,以适应其非线性特征,实现对离合器进行准确的动作控制。
为了构建输入仿射系统的表示方法,将体积流的矢量q(p)和qT(p)分成与新输入信号线性相关的分量和常数分量:


式中:f(x)为流量系数;gp(x)为压力加权项;gR(x)、gC(x)为位移加权项,其表述分别如下:

在f(x)的基础上,构造非线性补偿控制律:

式中:W(x)为解耦矩阵;α(x)为一个对角矩阵。
其表述分别如下:

通过状态向量x构造线性状态变换模型:

式中:ξ为与系统输出相关的系统目标矩阵;η为系统内部矩阵,η的计算过程为

联合式(16)、式(19)和式(20)可构造非线性前馈控制器:

式中:zFF为状态变换值,其计算过程为

式中:系统内部矩阵ηFF可按照式(20)方法计算;系统目标矩阵ξFF由调压阀、电磁阀和离合器的活塞目标位移yd1、yd2、yd3组成,其表述为

通过式(21)所示的非线性前馈控制器,能够根据目标位移获取系统所需的输入量uFF,以实现对离合器活塞进行轨迹控制。
4 实验结果
在Matlab/Simulink 环境下,对非线性前馈控制器(nonlinear feedforward controller,NFC)方法的轨迹控制有效性进行实验。实验中引入了滑模控制器(sliding mode controller,SMC)方法作为对比,以便直观地观察NFC方法的控制效果。
4.1 方波轨迹跟踪测试
采用NFC 方法和SMC 方法,对方波目标轨迹进行跟踪控制,所得跟踪结果如图2所示。
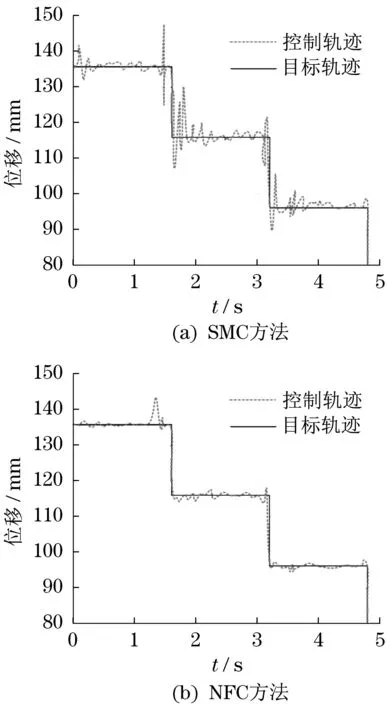
图2 SMC 方法和NFC 方法控制下的方波目标轨迹跟踪结果Fig.2 Tracking results of square wave targets controlled by SMC method and NFC method
从图2 可见,SMC 方法和NFC 方法都能实现对目标轨迹的跟踪。但将SMC方法和NFC方法的控制轨迹进行对比可见,在目标轨迹产生变化时,SMC 方法控制轨迹每次都产生了较大的超调现象,虽然NFC 方法的控制轨迹在目标轨迹变化时也产生了超调现象,但超调量远小于SMC 方法控制轨迹的超调量。而且在产生超调现象后,SMC方法比NFC 方法需要更久的调整时间,才能使得控制轨迹趋于目标轨迹。对比图2(a)、图2(b)中的超调量可知,SMC 方法控制轨迹的最大超调量为14.03 mm,NFC 方法控制轨迹的最大超调量为8.07 mm。由此可见,NFC 方法可准确跟踪方波目标轨迹,且跟踪过程的超调现象较少。
在对方波目标轨迹的跟踪过程中,SMC方法和NFC方法控制的系统压力变化情况如图3所示。
由图3 可知,SMC 方法和NFC 方法控制下的压力变化情况,在整个控制过程中,SMC 方法控制下的压力变化次数较多,且波动幅度较大。NFC方法控制下的压力变化次数较少,且波动幅度也较小。由此反映出NFC 方法在对方波目标轨迹跟踪时,控制过程较为平稳。

图3 方波目标轨迹跟踪时SMC 方法和NFC 方法控制下的压力变化情况Fig.3 Pressure variation under SMC method and NFC method control during square wave target trajectory tracking
4.2 不规则轨迹跟踪测试
采用NFC 方法和SMC方法对方波目标轨迹进行跟踪控制,所得跟踪结果如图4所示。
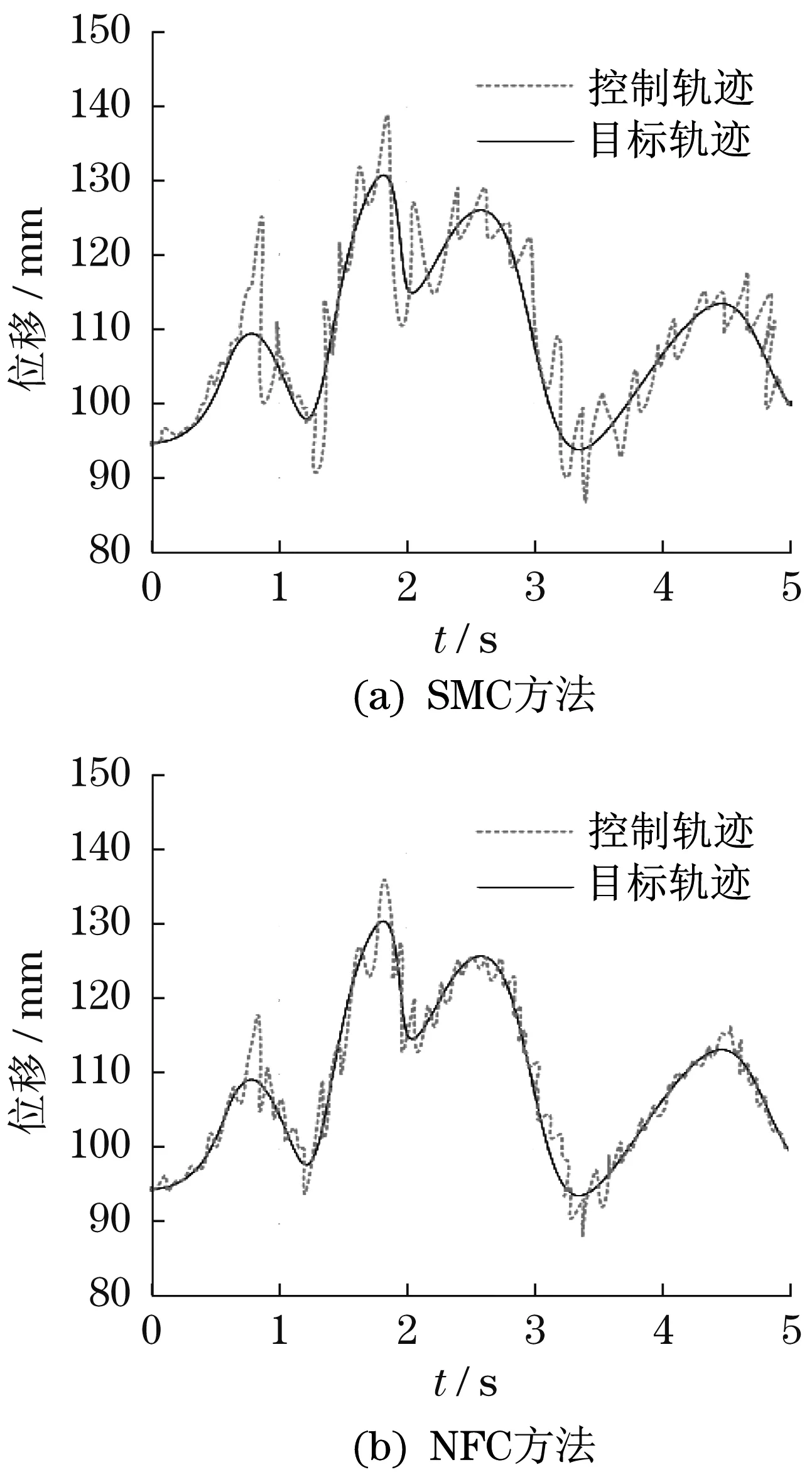
图4 SMC 方法和NFC 方法控制下的不规则目标轨迹跟踪结果Fig.4 Tracking results of irregular target trajectories controlled by SMC method and NFC method
对比图4 中SMC 方法和NFC 方法控制下的不规则目标轨迹跟踪结果可知,SMC 方法的控制轨迹出现了6次较大幅度的超调现象,而NFC 方法的控制轨迹只出现了3 次较大幅度的超调现象。在出现超调现象后,NFC 方法经过短暂的调整后,即可将控制轨迹调整至目标轨迹,而SMC 方法需要经过较长时间的调整才能将控制轨迹调整至目标轨迹。对比SMC方法和NFC方法控制轨迹的最大超调值可以发现,SMC 方法控制轨迹的最大超调值为14.16 mm,NFC 方法控制轨迹的最大超调值为8.92 mm。由此可见,NFC 方法不仅能较好地控制离合器按照指定轨迹运动,而且还具有较强的适应性,能适应多种目标轨迹的要求。
在对不规则目标轨迹的跟踪过程中,SMC方法和NFC方法控制的系统压力变化情况如图5所示。
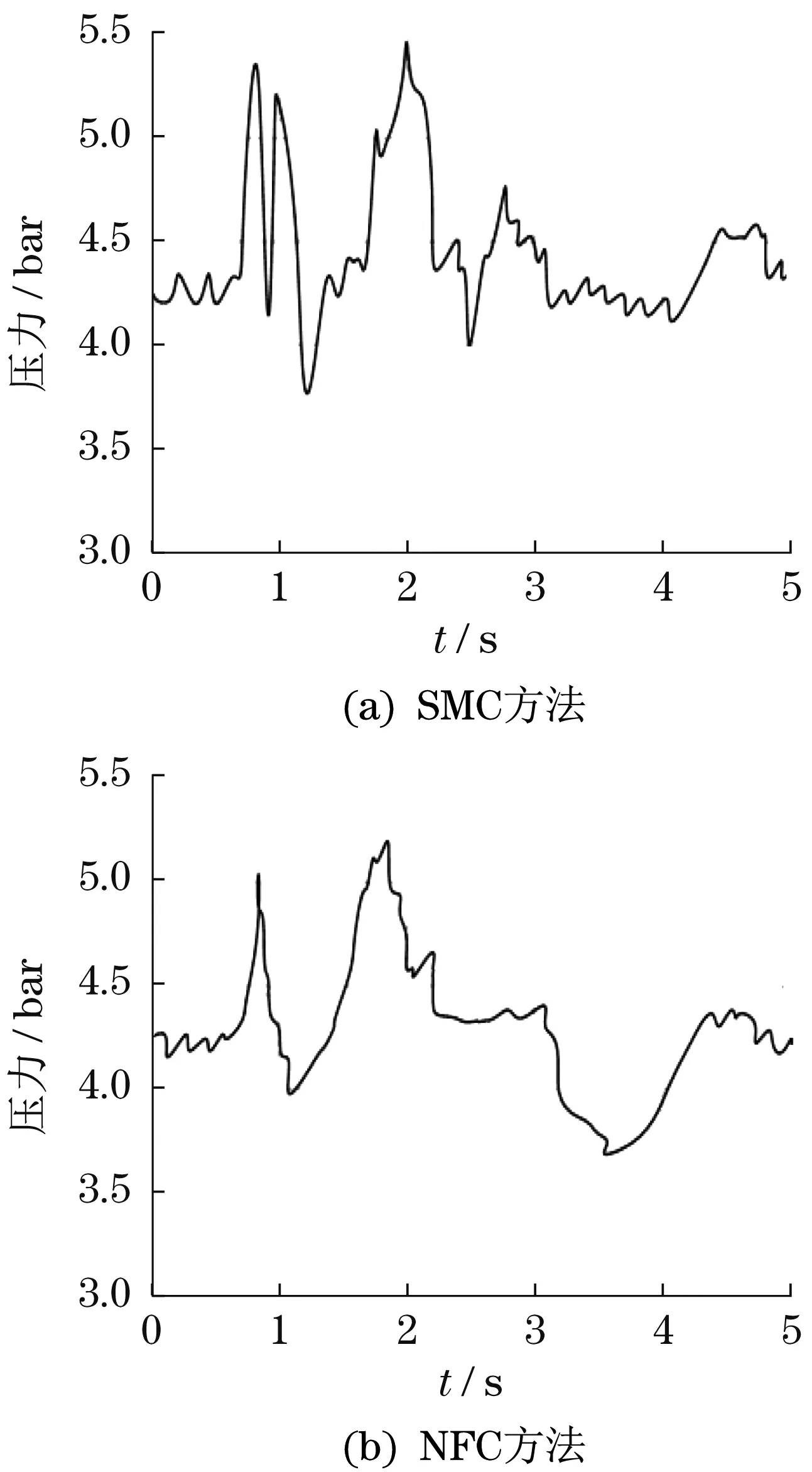
图5 不规则目标轨迹跟踪时SMC 方法和NFC 方法控制下的压力变化情况Fig.5 Pressure variation controlled by SMC method and NFC method in tracking irregular target trajectory
如图5 所示,在对不规则目标轨迹跟踪时,SMC 方法控制下的压力变化,比NFC 方法控制下的压力变化更为剧烈,且压力的波动更为频繁。说明NFC 方法不仅能控制离合器准确跟踪目标轨迹,而且还为跟踪过程的稳定性提供了保障。
5 结语
本文在对驱动离合器工作的液压装置进行结构分析后,通过泵的角速度及活塞位移,建立了液压装置的物理方程。将系统的体积流矢量分解成线性相关的分量和常数分量,用以建立输入仿射系统,并在此基础上构造了非线性补偿控制律;通过系统压力等参数定义了状态向量,并通过其建立线性状态变换模型,将其与非线性补偿控制律联合,建立了非线性前馈控制器。实验结果显示,本文所提的非线性前馈控制器具有良好的控制性能,能为控制电液驱动离合器的准确运动提供有力的保障。
