基于局部线性模型的传感器故障检测仿真
2022-07-20孙伶俐罗俊秋
周 洋,罗 棋,孙伶俐 罗俊秋
(1. 中国地震局地震研究所,湖北 武汉 430071;2. 湖北省地震局,湖北 武汉 430071)
1 引言
湖北区域地球物理台网目前共计23个台站83套仪器,其中地下流体仪器41套,SWY-II型数字式水位仪9套、SZW-1A及SZW-II数字式温度计15套、RTP-II型气温气压雨量综合观测仪3套、WYY-1型气象三要素观测仪14套[1]。地下流体仪器种类繁多、在网运行数量也是在各观测手段(重力、形变、电磁、流体)中居首,同样发生故障的概率与频次也是最多。故寻求一种应用前景更为广阔的传感器故障检测方法显得尤为重要。
国内外在传感器故障方面的研究成果很多,方法也是多种多样,硬件冗余方法,解析冗余方法,神经网络方法,信号处理方法等等都得到了很好的研究和应用[2]。文献[3-7]提出了基于小波变换的传感器故障诊断方法。文献[8]主要介绍了连续小波变换和BP神经网络在传感器故障诊断中的应用。文献[9-10]采用冗余传感器进行故障检测。文献[11]提出了基于小波包的MSPCA模型,并应用于传感器的故障诊断。文献[12]基于输入输出信号趋势分析,提出基于形态学-小波的传感器故障检测与诊断的新算法。文献[13]主要利用三层前馈神经网络,用反向传播算法进行训练,从而对一个一阶线性系统和一个二阶非线性振荡系统中的传感器进行了故障诊断,并且取得了较好的效果。文献[14-15]应用了多模型自适应估计方法。
本文提出了一种新的传感器故障FDI方法,并将其应用于一个非线性动态现实过程。过程的局部线性模型的参数用于生成类似于奇偶空间方法的结构残差。这使得在广泛变化的工作条件下,仅使用一个非线性模型,就可以连续地对非线性过程的传感器故障进行直接故障诊断。以地震地下流体仪器传感器故障检测为例说明了该方法的适用性。
2 模糊过程模型
局部线性模型树(LOLIMOT)算法是基于一个非线性动态函数的思想,其中u1到um为m个物理输入,y为输出。
y(k)=y(x(k)),x(k)=[x1(k),x2(k),…,xn(k)]T
x(k)=[u1(k-1)…u1(k-nu,1),…
um(k-1)…um(k-nu,m),
y(k-1)…y(k-ny)]
(1)
通过分段线性模型,它们物理输入的时延值和过程输出的时延值构成了维数为n的模型输入空间,每个局部模型只在输入空间的某个子区域上有效。局部模型有效的分区不是清晰的而是模糊的。因此,输入空间中某一点的一个局部模型i的有效性由加权函数zi表示,该加权函数在整个输入空间上连续定义,并从零(无效)缩放到一(完全有效)。该方法采用归一化高斯加权函数Φi。每一个局部模型输出yi被计算为输入xi(超平面)的线性函数。整个模型的输出被计算为所有M个局部线性模型输出的加权和。

(2)
其中,w0i…wni是第i个线性回归模型的参数,x1…xn是输入、而Φi是以ci为中心,σi为标准偏差的归一化高斯加权第i个模型的函数。模型输出的这种计算推导出本地模型输出之间的非线性插值。 高斯描述为


(3)
这种类型的模型被称为通过重叠局部基函数对线性模型进行插值的局部模型网络。 事实证明,该模型和式(3)中的版本是通用的,因此显然具有相同的空闲参数数量的属性。 该模型也可以解释为具有高斯隶属函数的Tagaki-Sugeno模糊模型。由于所有局部线性函数都依赖于相同的输入xi,式(2)可以写成下面形式

=w0+w1x1+…+wnxn
(4)
这类似于参数wi取决于输入xi的线性过程描述。 图1阐明了局部模型方法。局部模型的参数以及高斯模型的中心和标准偏差是在两个构造循环中确定的。在下文中,参数wi可用于生成结构化残差以隔离传感器故障。

图1 局部模型方法
3 故障检测方案
为了检测和隔离传感器故障,大多数FDI模型的残差r(k)具有以下属性:
r(k)≈0 无故障情况(噪声影响,不确定性)
r(k)≠0 发生故障
其中k表示某个采样间隔。 残差可以是以至少一个测量量对特定残差没有影响的方式进行设计。如果测量有误,则解耦残差很小,而其它所有受影响。偏斜和未偏斜残差的模式指示故障的位置。产生这些所谓的结构化残差的一种方法是基于状态空间线性过程描述的奇偶校验空间方法。在下一个小节中,直接从线性生成结构化残差的方法介绍微分方程。取决于实际输入参数wi的伪线性方程(5)用于生成残差。
3.1 结构化残差的生成
假设具有m个输入ui和r个输出yi的非线性离散系统可以进行局部线性模型建模
… = …

(5)
根据式(5),参数aij和bij不是恒定的,而是取决于模型输入xi。引入长度为tw≥n的时间窗口,其中n=max(nym,num)。使用先前的测量参数tw可推导出以向量形式表示的tw-n时延方程。
A1y1(k:k-tw)+…+Aryr(k:k-tw)=
B1u1(k-1:k-tw)+…+Bmum(k-1:k-tw)
(6)
其中dim(yi)=[1*r■(tw+1)], dim(ui)=[1*r■tw], dim(Ai)=[tw*r■(tw+1)], dim(Bi)=[tw*r■tw].Y和U包含时间窗口内的所有先前输出和输入。
yi(k:k-tw)=[yi(k),yi(k-1),…,yi(k-tw)]T
ui(k-1:k-tw)=[ui(k-1),…,ui(k-tw)]T
(7)
Ai和Bi包含输出和输入的所有参数。注意由于(8)和(9)的结构,输入ui或输出yi的所有实际值和延迟值仅分别用矩阵Bi或Ai加权。使用(7)并引入残差生成器矩阵W,在无故障情况下接近零的残差可以通过以下方式设计。

(8)
从(8)和(9)可以看出,选择W的wT行向量来满足条件
WTBi=0,或者wTAi=0
(9)
分别导致残差与输入ui或输出yi解耦。W的设计方式是,每个行向量都是不同的Ai或Bi矩阵的零空间。这导致结构化残差矢量r(k)具有很强隔离形式。时间窗tw的长度应选择为可能的非平凡解决方案(wT≠0)。存在一个n*m的矩阵X∈[AiBi],如果满足
rank(Xi)>m
(10)
为了简单起见,将省略离散时间k。
3.2 一般FDI方案
伪线性模型(5)的参数用于为每个样本间隔生成结构化残差,从而实现上述设计过程。 使用实际和先前的过程测量来评估残差。 为了检测残余变形,使用固定的阈值。
如前所述,实际过程参数wi不是恒定的,而是取决于输入和输出。在无故障的情况下,这对残差没有影响,但是如果在模型输入xi上发生故障,则加权函数(3)会受到影响。因此,从局部模糊模型得出的参数wi与式(5)在无故障情况下的参数是不同的。 这影响了去耦残差。 为了避免错误警报并实现正确的故障隔离,有必要选择阈值,以使解耦后的残差保持在阈值以下。
3.3 残差的灵敏度
假设用(7)描述系统,并使用(9)生成残差。假设在输出传感器yj上发生故障fyj(可以用相同的方式处理u上的故障)并影响矩阵元素Ai和Bi。然后,残余矢量将通过以下方式受到影响。
rfyj=Wfyj(Aj+△Aj)(yj+△yj)+

(11)
由于yj的变化,所有取决于yj的残差都会偏转,并且参数为矩阵。为了将残差j与yj解耦,设计W的第j行向量来满足方程。

(12)
解耦后的残差可计算为
rjfyj=rj+△rj=(wj+△wj)T

(13)
残差偏转△rj可通过(9)和(14)计算得出


(14)
该方程式描述了去耦残差,可通过以下方式用于阈值设计:
通过将x设置为恒定值来选择一个工作点。
通过本地模型(4)的加权叠加来计算(8)的参数。
用最大参数差△搜索局部模型到后者(仅在非线性输入方向上)。
为这些参数集计算W和B,并计算(14)中△的差异。
对不同的操作点重复此过程。
该程序可评估残差偏转,并可用于残差rj的阈值trj的设计。
trj=△rj+Crj
(15)
其中C是由于噪声和模型不确定性而产生的常数偏移项。
3.4 并行和系列并行模型
流程的每个动态模型都可用于反馈输出预测的并行模式,或将以前的过程输出作为模型输入的系列并行模式。
系列并行模式执行一步预测,并且减小输出传感器故障的影响。因此,在此过程中,过程模型仅用于检测输入故障。并行模型领先多步系列参数模型,并行模型预测会导致残差如果发生输出故障,则测量永久偏转。该模型可用于输出故障检测。
4 仿真研究
本文在上述模型算法的基础上,结合湖北省地震地下流体数据实例进行仿真。在仪器传感器故障检测前先对观测数据做去噪处理,以期保留信号的有效成份,滤除噪声部分。
4.1 信号去噪
同传统的数据处理方法相比,小波滤波方法具有独特的优势,即能够在去除噪声的同时,很好的保留信号的突变部分或图像的边缘。而本文提出的一种新的非线性过程的局部线性模型算法则比传统的小波滤波算法更具优越性。表1给出几种不同算法的定性比较。
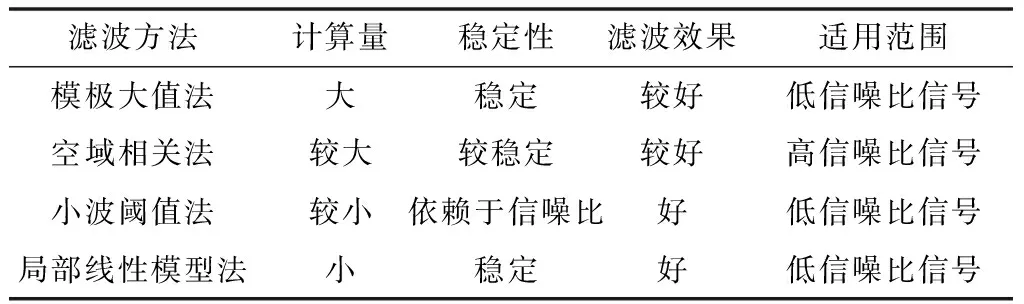
表1 几种滤波方法的定性比较
以2020年4月荆门台1测点水温数据为例,给出数据信号在4种不同的滤波算法处理下的结果,如图2。

图2 几种滤波方法比较
从图2得到的结果来看,局部线性模型法对噪声有很好的抑制作用,去噪效果明显,为实际工程应用中提供了一个新的研究思路。
4.2 传感器故障检测仿真
选取湖北省房县三海村台、钟祥马岭台、秭归台水温仪传感器进行检测仿真,时间跨度200天。如图3-5。

图3 房县三海村台传感器检测
为更好的检测传感器故障,对每组数据先进行滤波去噪,将滤波信号平移以示区分原始信号与故障信号。然后用算法对滤波信号检测传感器出现故障的时间节点。房县三海村台水温仪传感器在第45天左右出现明显下降台阶,可判断为故障出现时间段,再依据起止日期,便可准确定位故障出现的时间点。显然,根据原始信号和滤波信号无法判断。
同理,钟祥马岭台在第120天同样检测出故障起始点。而秭归台在第100天出现故障,且信号噪声明显增多。实现仿真时间段可根据实际需要实时调整,系统可移植性、灵活性强。表2为上述几种算法的检测性能比较。

图4 钟祥马岭台传感器检测
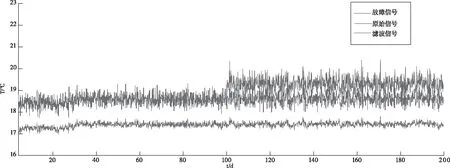
图5 秭归台传感器检测

表2 几种算法检测的结果比较
从SNR和RMSE的定义可知,SNR值越大,检测效果越好;RMSE反之[16]。能量成分比越小,检测效果越好,标准残差反之。而局部线性模型法很好地保留了信号发展初期的高频特性,最大限度地反应了原信号本身的性质,且性能参数优于其它几种算法。
5 结论
本文提出一种非线性过程的局部线性模型传感器故障检测的新方法。并利用该模型对湖北省地震地下流体台站仪器传感器故障检测进行仿真,得出以下结论:
1)过程的局部线性模型的参数用于生成结构化残差。该模型允许评估残差的灵敏度,该灵敏度可用于阈值设计。 这些方法的结合为检测和隔离突发故障以及非线性过程中缓慢发展的故障提供了强大的工具。
2)该模型对地下流体仪器传感器故障检测准确、快速,信号消噪效果好,为台站检测传感器故障提供一种新的研究方向和方法,为仪器维护人员提供一种新的检测手段和途径。
3)该算法不依赖于具体的对象的数学模型,可移植性强。仿真结果可迅速判断故障发生的时刻。该模型可推广应用至其它观测手段的传感器故障检测,如形变、重力、电磁等。