指令制导中雷达测量误差对制导精度的影响
2022-07-14赵兴隆丁云鹏刘本慧黄书平张凤岗
张 赢,赵兴隆,丁云鹏,郭 甜,刘本慧,黄书平,张凤岗
(上海机电工程研究所,上海 201109)
指令制导是遥控制导体制的一种,是导弹的一种重要制导方式,尤其是在地对空导弹制导中的应用十分广泛[1-2]。对于近程战术导弹来说,指令制导可作为全程制导。对于远程导弹来说,一般作为中制导。
指令制导多通过应答机实现导弹与地面的交互通信,在拦截目标过程中,由地面相控阵制导雷达测量得到导弹和目标的相对角偏差和距离等信息,根据设定的导引和控制规律,经过计算形成制导指令,并通过指令发射装置发送至弹上,弹上应答机接收到制导指令后,将其传送至自动驾驶仪完成对导弹的控制。指令制导的优点是弹上制导控制系统简单,技术上容易实现,且价格低廉。
在采用指令制导的防空导弹系统中,地面制导雷达多采用相对测角体制,即测量导弹与目标之间的相对运动参数,完成弹目分配后,在对目标跟踪后即切换时序对打击该目标的导弹进行跟踪测量,绝对系统误差中的标定误差、平台举升误差、俯仰倒伏机构平台电机安装误差、调平误差等在计算相对测角系统误差时可以抵消,剩余随机误差成为影响制导精度的主要因素。
雷达测量信息包括距离、高低/方位角、速度,均包含测量误差。地面制导雷达测量误差可分为系统误差和随机误差[3]。系统误差指随测量时间的变化其幅度大小保持恒定或按照某种规律缓慢变化的误差,该误差在某种程度上可预测,因此在测量前或测量后应用合适的校准和补偿技术可以进行部分修正。随机误差是指随测量时间变化其幅度大小不确定或快速变化的误差,这种误差不能通过校准修正,但可以通过滤波来减小。
针对雷达测量误差,需要做以下两方面工作:①建立误差模型,通过试验测量和理论分析,得到误差的统计规律;②通过信号处理手段,想办法抑制误差噪声,得到所需信号的最优估计,提高制导精度。
雷达测量随机误差大多为白噪声,卡尔曼滤波是处理此类型噪声的有效手段[4-5],基于随机估计理论,建立输入、输出、噪声作用的状态方程,利用噪声的统计特性形成滤波算法,由于其在时域下工作,可对非平稳、多维随机过程进行统计。同时卡尔曼滤波是递推的,便于在计算机上实现实时应用。对于制导系统来说,弹目相对运动过程中,含有非线性环节,因此,系统的状态方程或观测方程是非线性方程[6]。
针对非线性相对运动方程,扩展卡尔曼滤波(Extended Kalman Filter,EKF)和无迹卡尔曼滤波(Unscented Kalman Filter,UKF)是常用的有效手段。EKF 方法是对非线性方程做线性化近似,不可避免地会引入近似处理误差;UKF 沿用传统卡尔曼线性滤波框架,进行一步预测时,使用无迹变化来处理均值和协方差的非线性传递问题[7-11]。UKF 算法是对非线性函数的概率密度分布进行近似,用一系列确定样本来逼近状态的后验概率密度,由于无线性近似误差,且不需要对状态方程系数矩阵进行求导,因此对于非线性分布的统计量有较高的计算精度。
1 指令制导相关导引规律
指令制导大多采用三点法或半前置点法导引律,纵向平面内弹目运动关系如图1 所示。
图1 中,Rt为制导站与目标的相对距离,Rm为制导站与导弹的相对距离,εt、εm为目标、导弹高低角,Vm、Vt分别为导弹和目标的运动速度,θm为弹道倾角,θt为目标速度倾角。
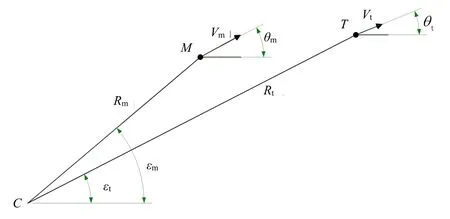
图1 弹目运动关系
导引规律如下:
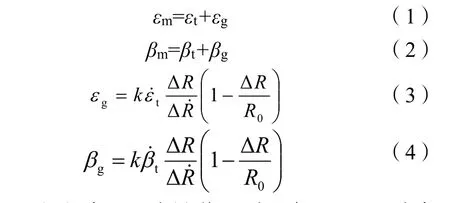
式(1)—(4)中:m 为导弹;t 为目标;εg、βg为角度补偿量分别为目标俯仰、方位角速度;k为前置量;ΔR、ΔR˙分别为导弹距离和目标距离之差及其导数;R0为初始目标距离。
角度补偿量保证在ΔR=0 及ΔR=R0时,都满足εg=0、βg=0,且在补偿量公式中引入目标角速度量,能够更好地跟踪运动目标。
当k=0 时,为三点法,是指导弹在攻击目标的运动过程中导弹始终处于制导站与目标的连线上。
当k=-0.5 时,为半前置点法导引律,此时导弹角加速度与目标角加速度无关,可令目标机动加速度对导弹弹道倾角的影响最小。
利用三点法及半前置点法仿真结果对比如图2 和图3 所示,半前置点法对目标运动有一定的补偿作用,但在目标低速运动时,半前置点法的改善并不明显,且本文主要研究雷达测量误差的影响,因此仅考虑低速运动目标的拦截仿真,因此采用三点法导引规律。

图2 三点法与半前置点法轨迹对比
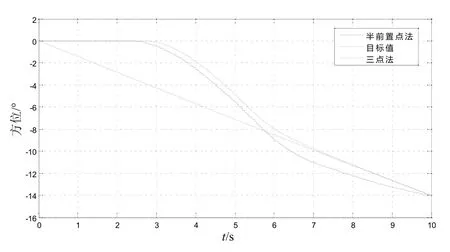
图3 三点法与半前置点法方位角跟踪对比
2 雷达测量误差对制导精度的影响
根据图1,由二维状态扩展至三维状态,可以列出导弹运动方程如下,目标运动方程同样可以得出:
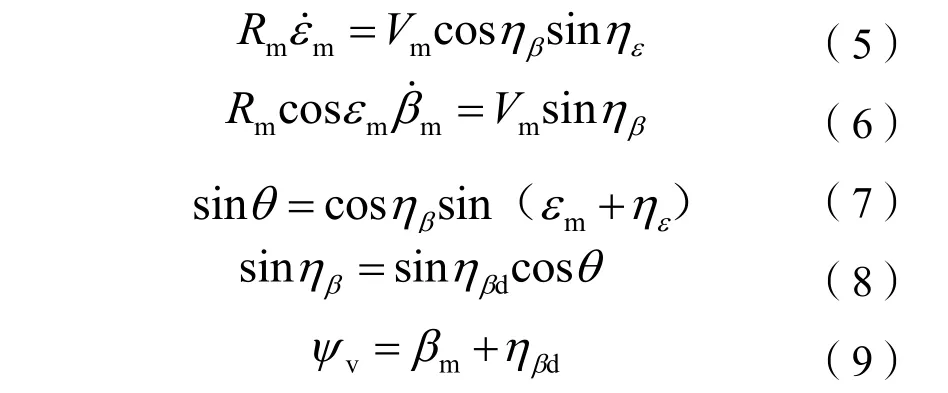
式(5)—(9)中:Ψv为弹道偏角;βm为方位角。
制导雷达测量得到导弹相对于目标矢径的纵向和侧向线偏差,导引律根据测量线偏差信息解算得到俯仰和偏航过载指令。

式(10)中:kα为导弹高低线偏差比例系数;kβ为导弹方位线偏差比例系数。
驾驶仪经过解算后通过操纵舵面偏转实现弹体姿态控制从而付出过载,原理图如图4 所示。

图4 制导控制系统原理
雷达测角系统差包括由机械结构标定、举升、调平、机电安装带来的误差。雷达测角起伏误差包括由天线指向、量化(移相器量化、数据量化)、A/D 转换、热噪声、扫描、角闪烁、低空多径等带来的误差。
假设雷达测量误差如下:测距系统误差6 m,随机误差3 m(σ);测角系统误差0.05°,随机误差0.05°(σ);测速系统误差5 m/s,随机误差5 m/s(σ),均符合正态分布。拦截轨迹如图5 所示。引入误差前后数字仿真结果如图6 所示。
图5 拦截轨迹

图6 引入误差前后制导精度对比
可以看出,雷达测量误差导致制导精度明显下降。解决思路如下:①雷达测量得到的误差包括系统误差和随机误差,系统误差在相对测量体制下明显减小,主要受随机误差影响,可通过卡尔曼滤波进行处理;②滤波处理前需要建立状态方程和观测方程,由于弹目相对运动过程中,含有非线性环节,因此采用无迹卡尔曼滤波进行处理。
3 无迹卡尔曼滤波处理
进行无迹卡尔曼滤波处理前,需根据导弹的动力学方程建立所需的状态方程和观测方程,状态方程用于描述导弹运动过程中相关状态变量的变化过程,观测方程用于描述观测变量与状态变量之间的关系。
根据导弹动力学方程,建立状态方程如下:
式(11)—(15)中:Rmxk、Rmyk、Rmzk、Vmxk、Vmyk、Vmzk分别为导弹k时刻距离及速度在惯性系下的分量;amxk、amyk、amzk为导弹惯性系下加速度信息,此信息可通过弹上惯测组件测得并通过坐标转换后,由弹上应答机下传得到;f为非线性状态方程函数;T为仿真步长。
根据雷达测量信息,建立观测方程如下:

式(16)中:h为非线性观测方程函数。
雷达测量噪声W(k)具有协方差阵R:
导弹非线性系统描述为式(13)和(16),目标认为匀速直线运动,系统描述得同样得到。首先利用无迹变换,在估计点附近确定采样点,用这些样本点表示的高斯密度近似状态的概率密度。状态向量x为n维随机变量,其均值为方差为P,通过无迹变换得到2n+1 个采样点X和响应的权值ω:
对于正态分布的情况,当状态变量为单变量时,选择κ=2;状态变量为多变量时,对于κ的选择,一般使之满足n+κ=3;a控制采样点分布的距离,调节a以使得高阶项的影响达到最小。0≤a≤1,一般取较小的数值,以避免在状态方程强非线性情况下取样的非局部效应。适当调节a和κ可以提高均值的精度。
计算上面得到采样点的一步预测:

计算系统状态量的一步预测及协方差矩阵,由采样点集的预测值加权求和得到:
根据一步预测值,再次使用无迹变换产生新的采样点集,并将生成的点集代入观测方程,得到预测的观测量Z(i)(k+1|k)。通过加权求和得到系统预测的均值及协方差:
计算卡尔曼增益矩阵,并计算系统的状态更新和协方差更新:
按上述过程进行滤波处理,雷达测距、测角信息及数字仿真结果如图7—图10 所示。高低、方位角能较好地拟合真实值,随机误差被有效抑制,剩余系统误差在相对体制下影响较小。同样弹道仿真条件下,制导精度如图11 所示,脱靶量均值和方差均有明显改善,制导精度明显提高。

图7 导弹斜距

图8 雷达测距信息滤波效果

图9 弹目高低、方位角
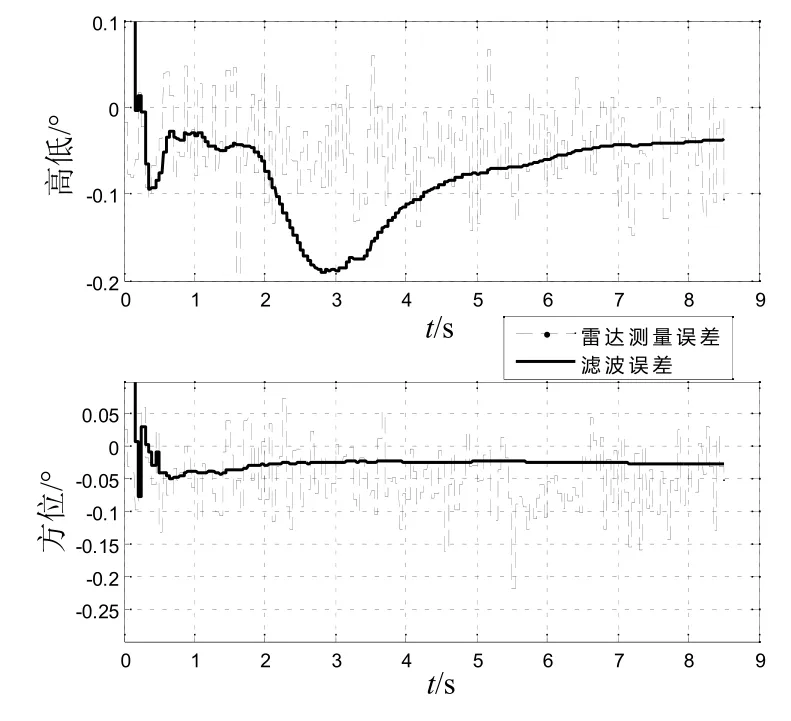
图10 雷达测角信息滤波效果
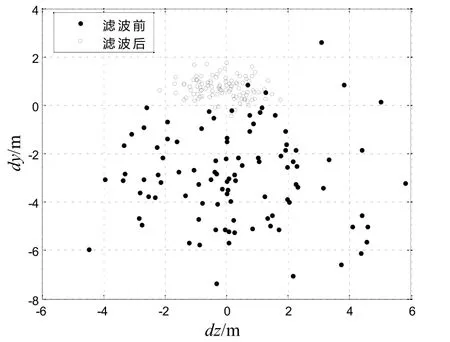
图11 滤波前后制导精度对比
4 总结
在指令制导系统中,雷达测量误差对制导精度影响较大,在相对测量体制下,主要需消除随机误差干扰。利用弹上通过应答机下传的惯测信息及地面制导雷达的测量信息,可建立滤波方程,基于UKF 方法实现了导弹高低、方位角的估计值,最后通过数字仿真表明:此种方法可有效抑制随机误差干扰,同时可提高制导精度。
