基于卷积神经网络的近壁流动高分辨率平均速度场预测方法
2022-07-14王少飞潘翀2齐中阳
王少飞,潘翀2,,,齐中阳
1.北京航空航天大学宁波创新研究院 先进飞行器与空天动力创新研究中心,宁波 315100
2.北京航空航天大学 流体力学教育部重点实验室,北京 100191
0 引 言
在流体边界层中,由于流体黏性在固体壁面产生摩擦阻力,因此摩擦阻力的精确测量对于评估载运工具的力学特性具有重要意义。常规摩阻测量方法可以分为直接法和间接法。直接法使用摩阻天平进行测量,存在诸如安装误差、流动干扰以及加工成本高等缺点。间接法通过获取壁面附近的某些物理量间接测量摩阻,如采用粒子图像测速(Particle Image Velocimetry,PIV)或粒子追踪测速(Particle Tracking Velocimetry,PTV)对边界层近壁区流动进行精细化测量,进而通过计算黏性底层的速度梯度来估算摩阻,其精度主要依赖于黏性底层中平均速度梯度的精度。
PIV 通过追踪跨帧示踪粒子图像对(下文简称粒子图像对)中一定查询窗口区域内粒子群的位移来得到查询窗口区域的平均速度,常用查询窗口尺寸为32 像素×32 像素,此方法的空间分辨率受限,不适用于速度梯度大(如黏性底层)的场景。 为了提高PIV 在边界层测量中的空间分辨率,研究人员提出了多种改进方案,如Nguyen 等采用长方形窗口、Willert和申俊琦等采用单行窗口均可得到法向空间分辨率较高的瞬时边界层速度场,进而估算瞬时摩阻。Shen将micro-PIV 中的平均互相关法扩展为单像素系综平均互相关法(Single Pixel Ensemble Correlation,SPEC),将速度场的空间分辨率提高至单像素精度。但该方法对粒子图像对样本总数要求高,粒子图像对的数量在O(10~10)帧才能获得较好的结果。PTV 则通过追踪单个粒子的位移得到高空间分辨率速度场,但需要进行粒子识别和跨帧匹配,且匹配算法自由度大,匹配精度受粒子浓度和跨帧位移的影响较大。
近年来,众多研究人员受深度学习在计算机视觉领域内所取得的重大突破的启发,将神经网络应用于边界层流动特性预测中,开辟了神经网络边界层预测的新方向。如,Cai 等提出了PIV–NetS网络架构,其具有典型的光流网络特点,将粒子图像对灰度图作为神经网络输入、已知的高分辨率速度场作为真值训练光流神经网络。在训练完成后,神经网络能够基于实验获得的粒子图像对输出高分辨率速度场。Lagemann 等提出了RAFT–PIV 架构,先将粒子图像对通过卷积层进行特征提取,然后对特征图进行互相关操作,将相关信息输入到卷积循环单元中预测高分辨率速度场。以上研究的一个实际限制在于均需预知高分辨率速度场信息作为神经网络输出端的真值,因此大部分研究均基于数值计算得到的速度场构造虚拟粒子图像对,形成神经网络的训练集。在实际实验中,粒子浓度、粒径、形状、分布和光照条件等图像信息千差万别,通过虚拟粒子图像对训练出来的神经网络能否适用于实验测量获得的示踪粒子图像对是一个需要考虑的制约性条件。因此,本文并未采用此类技术路线,而是提出了一种新的基于PTV 思想的耦合卷积神经网络(Convolution Neural Network,CNN)高分辨率平均速度场预测方法,即CNN–PTV。该方法先将实验获得的粒子图像对样本集作为CNN 的输入和输出,训练获得仅能预测该样本集所包含的平均流动的CNN,再进一步使用该CNN 预测单个粒子的跨帧位移。该方法解决了训练神经网络真值难以获取的问题,也规避了传统PTV 需要进行多粒子跨帧匹配的难点,可获得基于粒子图像对样本集的高分辨率平均速度场。
1 CNN-PTV 神经网络架构
图1为基于CNN–PTV 的边界层平均速度场预测思想示意图,其分为CNN 训练和平均速度场预测两个阶段。在训练阶段,将实验测量获得的一组跨帧粒子图像对样本集中的第一帧和第二帧分别作为CNN 的输入和输出真值,使用均方误差函数作为训练损失,使神经网络输出的粒子灰度分布信息逼近第二帧真值的灰度分布信息。遍历整个图像对样本集,使得CNN 收敛。训练完成后,CNN 隐含了训练样本集在整个像素空间中的平均光学流动信息。在流场预测阶段,将人工合成的只含单个粒子的图像输入到CNN 中,输出图像即为该粒子经过当地平均流动的对流在第二帧上的成像。通过高斯拟合确定单个粒子的中心位置(达到亚像素精度),即可对单个粒子进行跨帧追踪。将单个粒子遍历整个像素空间,即可获得空间分辨率达到像素精度的二维平均速度场。

图1 基于CNN-PTV 的平均速度场预测流程Fig.1 The ensemble velocity field predicted process by CNN-PTV
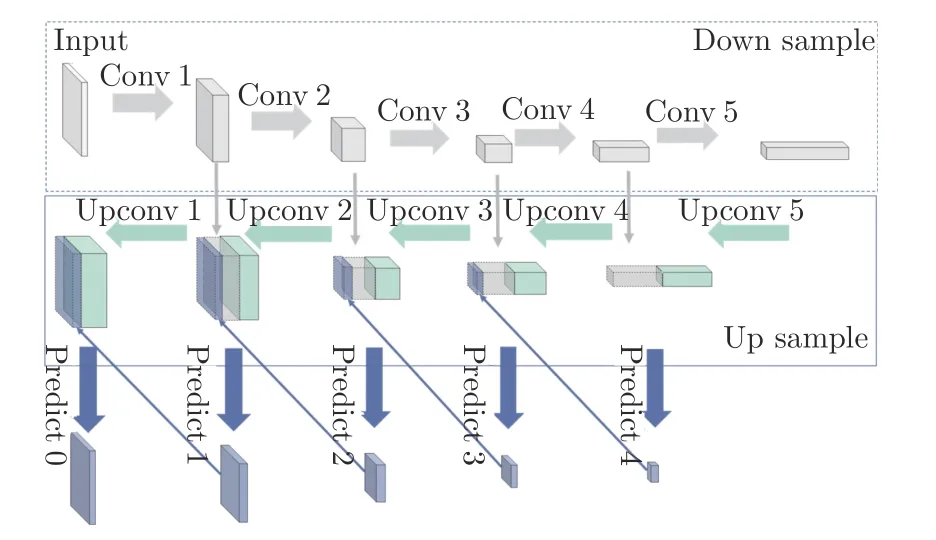
图2 CNN 结构示意图Fig.2 Schematic view of complete network architecture

表1 所测试CNN 的不同配置参数及损失Table 1 The parameters set in various tested cases
2 粒子图像对训练样本集
本文采用人工合成的虚拟粒子图像对测试CNN–PTV 算法预测近壁平均流动的能力,将预测的平均速度场与真实流场进行对比,并分析其误差特性。采用S.I.G 框架生成虚拟粒子图像对,依据已知速度场生成在像素空间内具有高斯分布特性的灰度粒子图像对。用于生成虚拟粒子图像对的参数设置如表2所示,共生成2 000 对粒子图像对。图像尺寸为68 像素×128 像素,接近真实近壁测量实验中近壁黏性底层的图像分辨率,便于后续直接应用。每一对图像上粒子团位移均服从边界层近壁平均流动的壁面率,即壁面倾斜角度为5°,两帧图像上平行于壁面方向的粒子最大位移为12 像素,垂直于壁面方向的粒子移动速度为0。 本文暂不考虑时序脉动量,速度场均为平均速度场。平均粒子直径为4 像素,灰度分布符合二维高斯分布。粒子浓度首先设置为32 像素×32 像素的窗口中存在约12.8 个粒子,单个像素位置上的粒子数,即单像素粒子浓度(particle per pixel,p.p.p.)为0.012 5。图3为人工合成的粒子图像对及速度分布示意。为简化讨论,后文中速度的单位均为像素/单位时间。

表2 人工合成虚拟粒子图像对的参数设置Table 2 List of particle image parameters

图3 人工合成虚拟粒子图像对及速度示意Fig.3 One snapshot of synthetic particle image in a steady near-wall flow field
3 平均流动运动预测
图4为不同神经网络配置和训练策略下CNN的损失曲线,其中实线为验证集损失,虚线为训练集损失。在不增加激活层的前提下,神经网络非线性拟合能力弱,损失一直保持较高值,输出粒子图像对上的大部分粒子边缘虚化,无法准确预测粒子移动。增加Relu 激活层并增加卷积核大小和深度后,CNN 中可训练参数增多,对训练数据的拟合能力增强,损失持续减小。在Case 8~10 测试中采用了多层加权损失作为损失函数,可以看到收敛后的损失进一步减少。此外,经过测试,改变学习率以及训练批大小对减小损失没有明显效果。
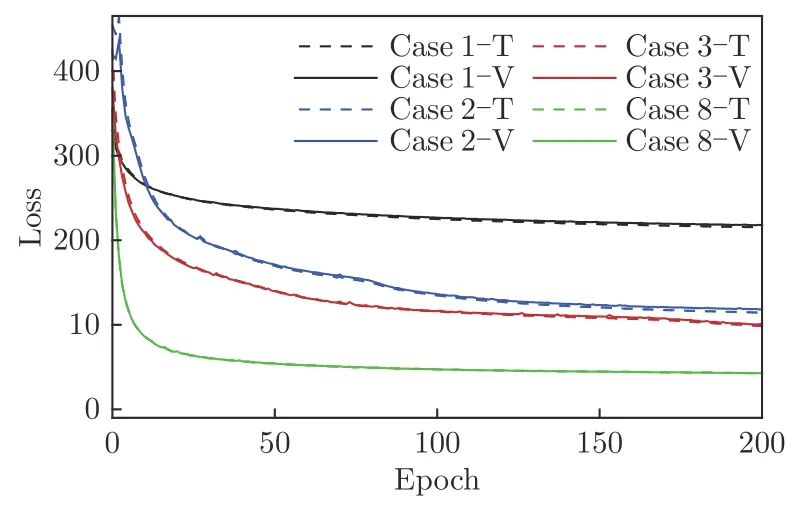
图4 不同配置神经网络训练过程中的损失曲线Fig.4 Loss curves in various cases
CNN 对第一帧输入粒子图训练后的输出结果及其与真实第二帧粒子图进行的对比如图5所示。其中,红色为真实粒子,绿色为预测粒子,当二者重合时则呈现为黄色。当训练损失减小到一定程度但未完全收敛时(Epoch=100,图5(a)),如图5(b)所示,神经网络的输出图像上下侧已出现清晰的粒子光斑,预测粒子位置已与该区域内真实粒子接近重合;仅在图像中部存在一些较为虚化的粒子,在流向上呈现拖尾现象,预测的虚化粒子也基本位于真实粒子附近,此时神经网络不能完全确定此区域内粒子的移动位置。随着训练的持续进行,训练集和样本集上损失持续减小,完全收敛后(Epoch=200,图5(c)),如图5(d)所示,CNN 预测得到的第二帧图像中虚化拖尾粒子减少,预测得到的粒子在大部分位置上与真实粒子重合。

图5 神经网络预测粒子图及与真实粒子图对比Fig.5 Comparation of predicted particles with real ones
训练结束后,神经网络中已经隐含了平均速度场信息。将只包含单个粒子的图像输入到神经网络中,此时神经网络将预测出此粒子在图像上的位移。因只包含单个粒子,无需进行粒子匹配,只需通过高斯拟合即可确定粒子中心位置,进而得到当地位移信息。通过将此虚拟粒子遍历图像所有位置即可获得高分辨率平均速度场。图6为不同神经网络预测得到的高分辨率速度云图和真实速度云图。可以看到,Case 8 得到的速度场已经十分接近真实值,而Case 6 和Case 7 得到的速度场在图像中部仍存在一定的偏差,即在x 方向上中部区域存在阶梯状误差,在y 方向上速度分量数值较小,预测得到的速度场明显不光滑。

图6 神经网络预测高分辨率速度场云图Fig.6 Contour plot of high-resolution predicted velocity field in Case 6-8 compared with real ones
图7为Case 8 的预测速度场绝对误差以及与相同样本集下单像素系综互相关(SPEC)所得结果的对比。e和e分别为水平和垂直速度分量误差,e为绝对速度误差。f(|e|)和F(|e|)分别为绝对速度误差概率密度函数及累计分布函数。 SPEC 算法将互相关窗口缩小为单个像素,通过增加样本数量可以得到高精度、高分辨率的边界层速度场,但需要的粒子图像对数量较多。对比二者速度分量误差分布图(图7(a)和(d))可以发现,采用2 000 对粒子图像对时,SPEC 算法两个方向上速度分量误差均控制在0.1 像素内;CNN–PTV 方法得到的误差分布图则将误差控制在了更小的范围内,水平方向绝对误差略高于垂直方向,但基本均小于0.05 像素。两个方向上速度分量误差的差异可能是由于CNN 在预测粒子图像对时存在偏差,在速度分量高的方向上偏差更为明显。这一点可以从未收敛的虚化粒子图像对上体现,如果第二帧粒子图像对上的粒子在流向上出现拖尾,则难以精准确定其中心的流向位置。从速度分量的概率密度分布(图7(c)和(f))可以看出,CNN–PTV 在x 方向上存在约0.02 像素的系统偏离。将绝对速度值累计分布的95%置信区间位置作为测速误差,对比CNN–PTV 与SPEC 的测速误差可以看出: CNN –PTV 的测速误差约为0.052 像素,SPEC 的测速误差则为0.095 像素(图7(b)和(e))。因此,此工况下CNN–PTV 对平均速度场的预测精度略高于SPEC。

图7 速度场预测绝对误差Fig.7 The absolute error of predicted velocity in image coordinate system
图8为近壁处壁面法向和水平方向平均速度曲线及其绝对误差分布,其中黑色为真值,红色为Case 8 中CNN–PTV 预测结果,绿色为SPEC 预测结果。横坐标y为垂直于壁面方向的像素距离,u和v分别为平行和垂直于壁面的速度分量,e和e分别为其绝对误差。从图中可以看出,CNN–PTV 预测得到的边界层平均速度曲线分布与真值贴合,偏离点比SPEC 更少。从垂直和平行壁面速度分量的绝对误差分布上可以看出,CNN–PTV 方法的绝对误差比SPEC 略小,大部分区域不超过0.03 像素。
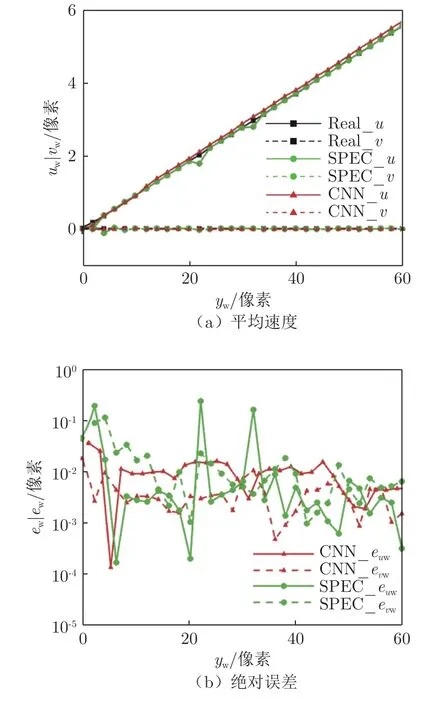
图8 壁面法向和水平方向平均速度曲线及其绝对误差分布Fig.8 Mean velocity profile in wall coordinate system and the absolute errors in two dimensions
4 粒子浓度和训练集样本数对预测精度的影响
Shen 等的研究已经表明,在使用SPEC 获得平均速度场信息时,其预测精度受粒子图像对样本数以及粒子浓度影响较为明显。神经网络算法作为典型的监督型学习方法,其拟合效果也同样受限于样本本身包含的信息。因此,有必要考察粒子浓度和样本数对本文发展的CNN–PTV 方法预测精度的影响。
图9为粒子浓度对 CNN–PTV 方法的训练损失和速度场预测误差的影响。粒子浓度度量标准采用p.p.p.,绝对速度误差(|e|)采用第3 节中定义的误差累积分布95%置信区间位置。第3 节采用的粒子浓度为32 像素×32 像素内存在约12.8 个粒子,对应的p.p.p.浓度为0.012 5。如图9所示,当粒子浓度持续降低时,验证集损失持续降低,且未出现过拟合现象。粒子浓度对CNN–PTV 方法的平均速度场预测误差的影响并不显著,约为0.05~0.08 像素,说明该方法对粒子浓度不敏感。当粒子浓度降低至32 像素×32 像素内只存在约3.2 个粒子(p.p.p.=0.003)时,仍能取得较好的预测精度。与之相比, SPEC 算法对粒子浓度十分敏感,平均速度场预测误差随粒子浓度减小而持续增大,当p.p.p.低于0.006 时,只采用2 000 对粒子图像对时无法得到可信的平均速度场。CNN–PTV 方法相对于SPEC 算法的优势之一可做如下解释:对于CNN–PTV 方法而言,在训练过程中,只要求CNN 的输出与第二帧粒子图灰度分布一致即可。当粒子浓度降低时,计算得到的灰度均方误差也会相应减小,但训练完成后其仍能准确预测出不同位置处灰度的整体变动,即不论粒子浓度大小,CNN 总能预测出训练样本上粒子的整体平均位移。

图9 粒子浓度对训练损失及速度场预测误差的影响Fig.9 Dependence of loss and velocity field prediction error on particle density
图10 为训练样本数对CNN–PTV 方法的训练损失和速度场预测误差的影响。32 像素×32 像素内的平均粒子数为12.8(p.p.p.=0.012 5),CNN 结构为表1中的Case 8。图10 还显示了同样本集下SPEC的结果以便对比,如图所示,训练样本数减小时,CNN–PTV 方法的训练损失增大,且速度场预测误差相应提高。对于所有的测试样本数量,SPEC 的速度场预测误差均高于CNN–PTV 方法,且当样本数低于1 000 时SPEC 算法失效,而CNN–PTV 在样本数为200 时的误差仍小于0.1 像素。
术前,两组焦虑、强迫、抑郁、恐怖、人际关系、偏执评分比较,差异均无统计学意义(P>0.05)。手术当日及术后2 d,两组焦虑抑郁评分比较,差异有统计学意义(P<0.05),其余评分比较,差异无统计学意义(P>0.05)。术前、手术当日及术后2 d强迫因子得分于均高于阳性分值(2分),术前偏执因子得分高于阳性分值。见表1。
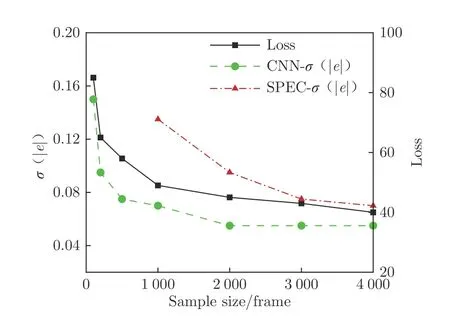
图10 训练样本数对训练损失及速度场预测误差的影响Fig.10 Dependence of loss and velocity field prediction error on sample size
5 结 论
本文设计了一种CNN–PTV 架构,主要用于预测边界层近壁区(黏性底层以内)的平均速度场。其包含了两个步骤:在训练阶段,采用真实粒子图像对构成的训练样本集对CNN 进行训练,使其具备预测单个粒子的平均跨帧位移的能力;在预测阶段,使用CNN 预测任意像素位置上单粒子的移动,最终得到像素级的平均速度场。此方法无需预知速度场信息,训练获得的CNN 仅能预测样本集所涵盖的平均流动,不具有泛化能力。但是,正是这种特应性使得CNN 的训练不需要传统光流CNN 所依赖的大样本训练集,因此其训练过程简单、收敛容易。
通过优化CNN 的网络构型和训练策略,CNN 可以精准预测粒子的灰度分布,进而得到高精度的平均速度场分布。仿真测试表明,本文提出的CNN–PTV 方法对平均速度场的预测精度略高于传统的SPEC 算法,且对粒子浓度不敏感,在训练样本较少的条件下仍能取得对边界层近壁平均速度场较为可信的预测。
本研究中的神经网络应用还仅限于黏性底层内人工合成的虚拟粒子,在后续研究中将扩展到真实实验获取的黏性底层粒子图像对,对诸如环境噪声、流场脉动等因素引起的粒子图像对不稳定导致的误差进行分析。
本文得到国家自然科学基金 (项目号:91952302,12002022)的资助。
